Власов К.П., Анашкин А.С. Теория автоматического управления
Подождите немного. Документ загружается.

быстродействием пропорционального регулятора, сигнал
управления формируют в соответствии с выражением
dttktktu
t
)()()(
0
21
. (8.4)
При этом
p
kpk
p
k
kpW
212
1у
)(
,
а передаточная функция по ошибке
)(
)(
21o
*y
kpkkp
p
pW
.
Тогда ()4=40, т.е. система астатическая, точность высокая.
В то же время эта система обладает достаточно большим
быстродействием, так как на начальном этапе регулирования она
работает как П-регулятор. В дальнейшем с течением времени
преобладающее влияние оказывает интегральная часть и система
полностью устраняет ошибку (t).
Заметим, что введение интегрирующего звена уменьшает
запас устойчивости системы, в связи с чем увеличивается
склонность ее к колебаниям.
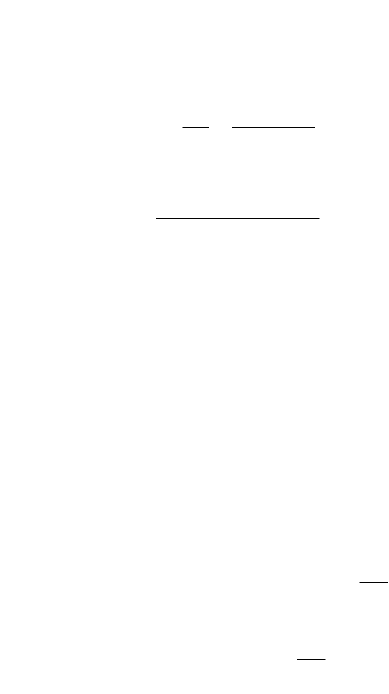
Действительно, представим систему с ПИ-регулятором в
виде, показанном на рис.8.2,;а. Передаточная и частотная функции
разомкнутой системы соответственно
и
p
k
pWpWpWpW
2
oyop
1)()()()(
2
op
1)()(
k
jjWjW
.
91
Таким образом, W
p
(j)
состоит из двух слагаемых,
второе из которых
)()/(
o2
jWkj
поворачивает вектор W
p
(j)
по часовой стрелке,
приближая его годограф к
точке (–1;;j0) и,
следовательно, уменьшая
запас устойчивости системы
как по модулю, так и по фазе
(рис.8.2,;б).
Подчеркнем, что введение интегрирующего звена в прямую
цепь управления делает систему астатической по управлению y
*
, но
увеличивает склонность ее к колебаниям.
4.;Пропорционально-дифференциальный закон (ПД-регу-
лятор). Регулирование по производной не имеет самостоятельного
значения, так как в установившемся состоянии производная ошибки
равна нулю и регулирование прекращается. Однако введение
производной играет существенную роль в динамических режимах,
поскольку позволяет учитывать не только наличие ошибки, но и
тенденцию к ее изменению:
dt
td
ktktu
)(
)()(
31
. (8.5)
При этом
pkkpW
31у
)(
,
а передаточная функция по ошибке
92
k
2
/p
W
o
(p)
y
*
u y
ОУ
УУ
а
+
+j
= 0
–1; j0
W
o
(j
)
W
p(
j
)
)(
o
2
jW
k
j
б
Рис.8.2
)(1
1
)(
31o
*
pkkk
pW
y
.
Тогда ();;0, т.е. система статическая.
Введение в закон регулирования производной позволяет
сформировать управляющее воздействие даже при отсутствии
ошибки на входе регулятора, что увеличивает быстродействие
системы. Кроме того, введение производной подавляет колебания в
системе и ускоряет протекание переходных процессов, т.е. улучшает
качество переходного процесса.
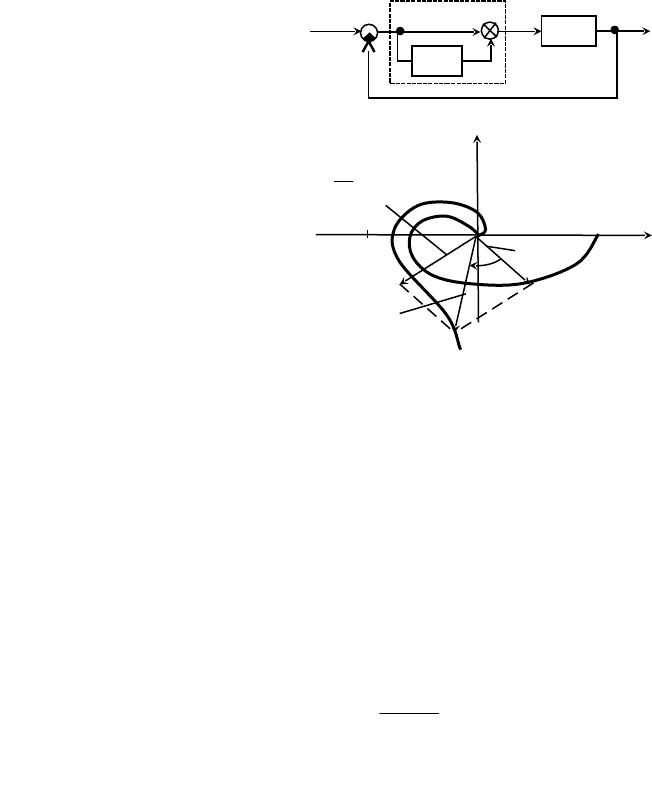
Убедимся в сказанном, проанализировав частотные
характеристики системы, структурная схема которой представлена на
рис.8.3,;а.
Имеем W
p
(j)4=4W
o
(j)[14+4jk
3
]. Следовательно, как и в
случае ПИ-регулятора, частотная функция W
p
(j) состоит из двух
слагаемых, но при этом второе слагаемое поворачивает вектор
W
p
(j) против часовой стрелки, удаляя годограф этого вектора от
точки (–1;;j0) и тем самым увеличивая запас устойчивости системы
(рис.8.3,;б).
93
y
*
u
k
3
p
W
o
(p)
y
ОУ
УУ
а
jk
3
W
o
(j
)
W
p
(j
)
W
o
(j
)
+
+j
–j
= 0
–1; j0
б
Рис.8.3

5.;Пропорционально-интегрально-дифференциальный закон
(ПИД-регулятор). Здесь управление состоит из всех трех слагаемых
уравнения (8.1), следовательно,
pk
p
k
kpW
3
2
1у
)(
. (8.6)
Введение в закон регулирования интегральной части
приводит к тому, что установившаяся ошибка в системе равна нулю,
и,;следовательно, система относится к классу астатических.
Поскольку вначале переходного процесса ПИ-регулятор
ведет себя как П-регулятор, введение производной для
этого;периода улучшает качество переходного процесса
(аналогично ПД-регулятору). В дальнейшем, по мере затухания
переходного процесса, роль производной падает и основную роль
начинает играть интегральная составляющая (как в ПИ-регуляторе).
Подчеркнем, что при введении производной в закон
регулирования необходимо обязательно учитывать спектральный
состав различных помех, действующих в системе.
Предположим, что f(t)4=4 a
1
sin
1
t (где
1
– высокая частота).
Тогда f
(t)4=4a
1
1
cos
1
t, т.е. амплитуда производной увеличивается
в;
1
раз, что существенно снижает помехоустойчивость системы
и;может привести к ухудшению качества ее работы.
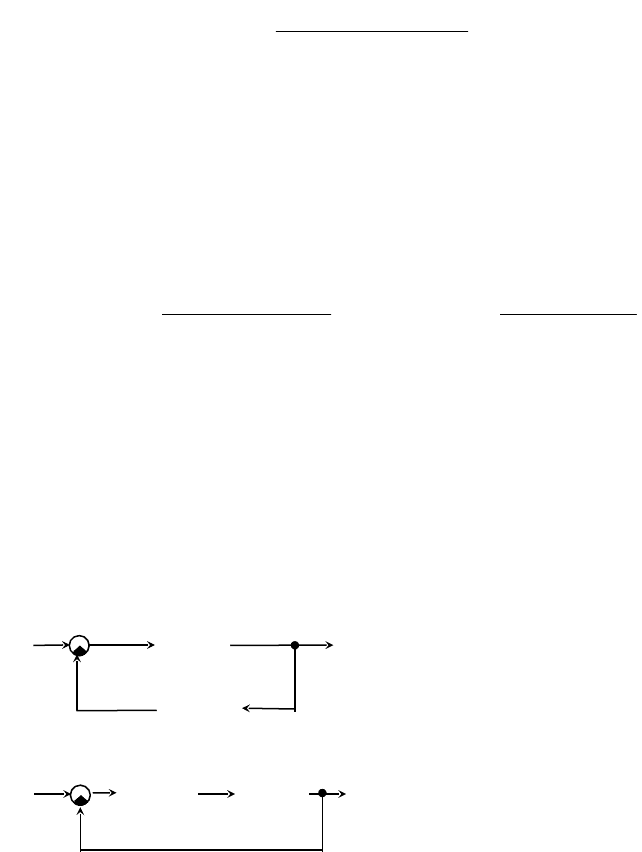
8.2. Коррекция линейных АСУ
Коррекция АСУ осуществляется введением в нее
корректирующих звеньев для регулирования качества процессов
управления, т.е. введение корректирующих звеньев в АСУ решает
задачу синтеза системы с заданными свойствами.
Существует несколько видов коррекции.
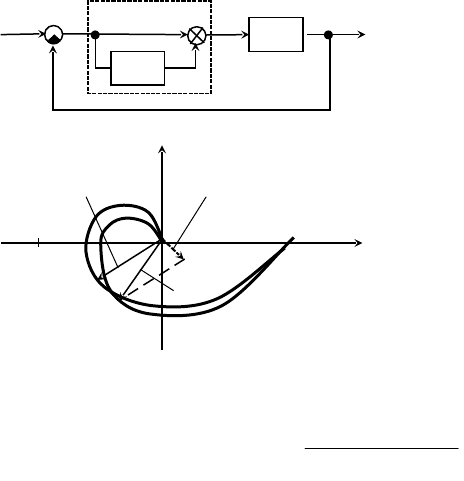
1.;Последовательная коррекция (рис.8.4). Пусть
передаточная функция скорректированной (желаемой) системы
задана и равна W
ск
(p). Передаточная функция неизменяемой части
системы равна W
c
(p). В;этом случае корректирующее звено с
передаточной функцией
)(
1
pW
k
включается последовательно с
неизменной частью системы и;определяется известными W
c
(p) и
W
ск
(p):
94
откуда
)()(
1
cск
pWpWpW
k
, (8.7)
)(
)(
)(
c
ск
1
pW
pW
pW
k
.;;;;;;;;
2.;Параллельная коррекция (рис.8.5). В этом случае
корректирующее звено включается параллельно с неизменной
частью системы. Тогда
)()(
2
cск
pWpWpW
k
, (8.8)
откуда
)(W)(
cск
2
pWppW
k
.
3.;Коррекция с помощью обратной связи. В этом случае
корректирующее звено может быть включено как в цепь обратной
связи (рис.8.6,;а), так и в главную (прямую) цепь (рис.8.6,;б)
последовательно с неизменной частью системы.
При включении в цепь обратной связи (встречно-парал-
лельной коррекции) имеем
)()(1
)(
)(
3
c
с
ск
pWpW
pW
pW
k
, (8.9)
откуда
)()(
)()(
)(
cкc
скc
3
pWpW
pWpW
pW
k
.
При включении в прямую цепь при единичной обратной
связи имеем
)()(1
)()(
)(
4
c
4
с
ск
pWpW
pWpW
pW
k
k
, (8.10)
95
y
x
)(
1
pW
k
Рис.8.4
y
x
Рис.8.5
)(
c
pW
)(
2
pW
k
откуда
)](1)[(
)(
)(
cкc
ск
4
pWpW
pW
pW
k
.
Использование того или иного вида коррекции в основном
определяется удобством технической реализации, поскольку в
линейных системах их динамические свойства могут быть в принципе
одинаковыми при любых типах корректирующих устройств.
Для получения формул перехода от корректирующих
устройств одного типа к другому при одинаковых W
ск
(p) необходимо
приравнять правые части соответствующих уравнений. Например,
приравняем правые части уравнений (8.7) и (8.9):
)()(
)(1
)(
)()(1
)(
)()(
1
c
1
3
3
c
с
1
с
pWpW
pW
pW
pWpW
pW
pWpW
k
k
k
k
k
.
Полученное соотношение связывает передаточные функции
корректирующих звеньев при последовательной и встречно-
параллельной коррекциях.
96
Рис.8.6
y
x
)(
c
pW
)(
3
pW
k
а
x
y
1
)(
4
pW
k
)(
c
pW
б
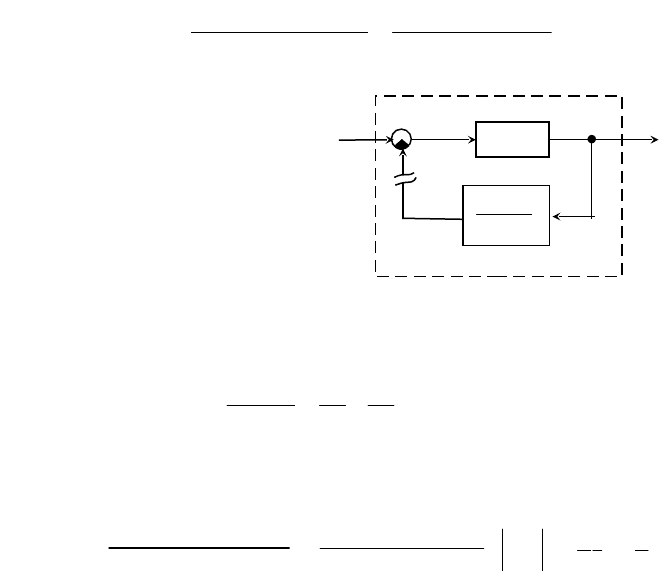
➢;;;Приме р14. Пусть необходимо синтезировать линейные ПД-
и ПИ-регуляторы, используя корректирующие звенья.
ПД-регулятор можно реализовать на базе П-регулятора
с;передаточной функцией W
П
(p)4= =4W
c
(p)4=4k
у
при помощи охвата
усилителя отрицательной обратной связью в виде апериодического
звена первого порядка (рис.8.7).
)1(
)1(
)1/(1
)(
aуa
aу
aaу
у
kkpT
pTk
pTkk
k
pW
u
.
Если k
у
;>>;1, то
0/
уa
kT
и
0/1
у
k
, тогда
pkkp
k
T
kk
pT
pW
u 31
a
a
aa
a
1
1
)(
,
т.е. получили передаточную функцию ПД-регулятора.
В случае положительной обратной связи
)1/(1
)(
aaу
у
pTkk
k
pW
u
)1(
)1(
aуa
aу
kkpT
pTk
p
k
k
pT
k
k
kk
2
1
a
у
у
aу
1
1
при
,
т.е. получили передаточную функцию ПИ-регулятора.
*;*;*
Пусть объект управления представлен в виде
последовательно включенных инерционных звеньев, выходные
координаты которых могут быть измерены. Тогда каждым из этих
97
k
у
u
Рис.8.7
1
a
a
pT
k
звеньев можно управлять автономно, что дает ряд преимуществ:
независимость настройки контуров и возможность достижения
высокого быстродействия.
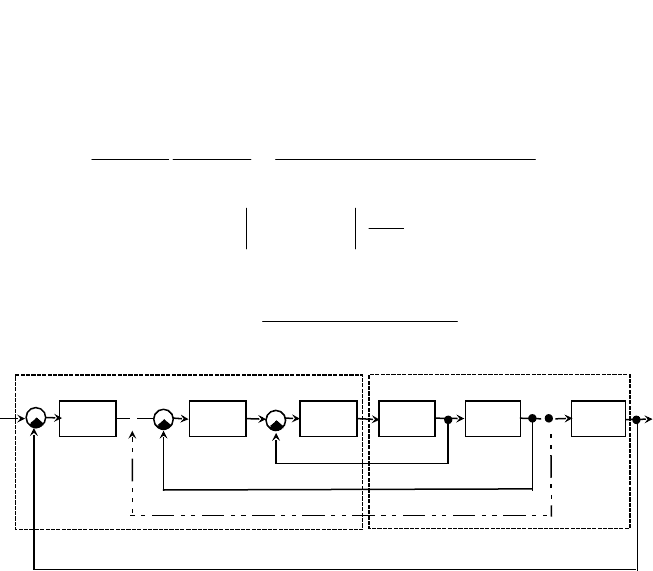
Рассмотрим многоконтурную систему с n контурами (рис.8.8).
Поскольку во внутренние контуры управления задание u
i
подается
из внешних контуров, все они являются последовательно
подчиненными, за исключением последнего, который называется
главным. В;связи с этим рассматриваемые системы получили
название – системы подчиненного управления (СПУ). Они были
предложены Кесслером и являются разновидностью коррекции с
помощью обратной связи с корректирующим звеном, включенным в
прямую цепь.
В качестве критериев качества переходного процесса
Кесслер предложил перерегулирование и время регулирования t
p
,
которые желательно минимизировать. Поскольку эти критерии
противоречивы, более корректной будет следующая формулировка
цели управления: достижение максимального быстродействия, т.е.
t
p
4=4min, при перерегулировании, не превышающем заданного
значения (обычно
з
;;5;%). Синтез системы, реализующей
поставленную цель, производится поконтурно, начиная с внутреннего
контура.
98
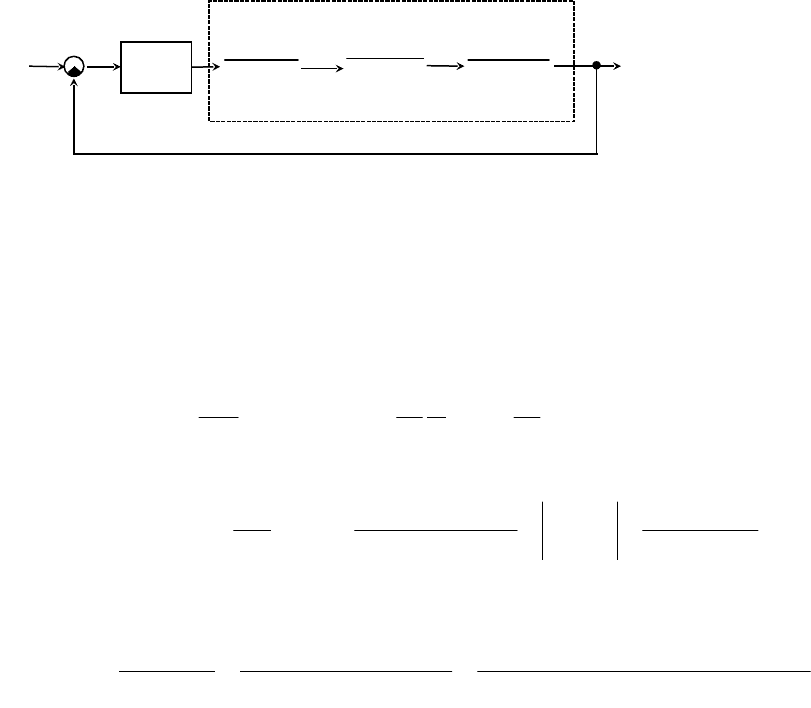
➢;;;Приме р15. Определим W
у
(p) при заданной передаточной
функции объекта управления, которая удовлетворяет
сформулированному критерию. Пусть структурная схема
внутреннего контура имеет вид, показанный на рис.8.9.
В данном случае объект управления представлен тремя
последовательно включенными звеньями, причем звенья,
характеризуемые временем T
1
, T
2
, – малоинерционные по
сравнению со звеном, характеризуемым T
о1
, т.е.
1o
1
TTT
i
i
.
Звенья с малыми постоянными времени можно заменить
эквивалентным звеном:
1)(
1
1
1
1
1
21
2
21
21
pTTpTT
pTpT
1
1
при
2121
pT
TTTT
.
Тогда W
o1
(p) примет вид
)1)(1(
)(
1о
1o
1o
pTpT
k
pW
. (8.11)
99
. . .
y
n
u
n
. . .
y
2
y
1
u
2
u
1
ПОС
ПОС
ПОС
ГОС
W
уn
(p) W
у2
(p)
W
o1
(p)
W
у1
(p)
W
o2
(p) W
on
(p)
УУ
ОУ
Рис.8.8
ГОС – главная обратная связь; ПОС – подчиненная обратная связь;
W
yi
(p) – передаточная функция автономного регулятора i-го контура;
W
oi
(p) – автономные звенья объекта управления i-го контура;
y
1
,4y
2
,;…,;y
n
– управляемые координаты
Структура УУ, а следовательно, и вид передаточной
функции W
y1
(p) выбирается из следующих соображений:
1);установившаяся ошибка в системе должна быть равна
нулю, т.е. система должна быть астатической, следовательно, в
структуре управляющей системы должна содержаться интегральная
составляющая;
2);для реализации цели управления (t
p
4=4min, т.е.
достижения максимального быстродействия) желательно
скомпенсировать большую постоянную времени T
о1
.
Исходя из сформулированных требований, W
у1
(p) должно
включать интегрирующее звено, а большая постоянная времени
объекта T
o1
быть скомпенсирована. Запишем передаточную
функцию ПИ-регулятора:
p
k
k
pT
k
kpT
pT
k
pW
u
u
uu
u
u
2
11у
1
)1()(
.
Тогда передаточная функция разомкнутой системы
)1(
при
)1)(1(
)1()()()(
1o
1o
1o
1o
1o1уp
pTpT
kk
TT
pTpT
k
pT
pT
k
pWpWpW
u
u
u
u
u
u
,
а передаточная функция замкнутой системы по каналу u
1
y
1
1)/()/(
1
)(1
)(
)(
1o
2
1o1o
2
1o
p
p
1
y
1
pkkTpkkTTkkpTpTT
kk
pW
pW
pW
uuuuuuu
u
u
.
100
W
у1
(p)
u
1
y
1
ОУУУ
Рис.8.9
1
1
2
pT
1
1
1
pT
1
1o
1o
pT
k