Тюменцев Ю.В. Оптимальное управление. Лекции-Слайды
Подождите немного. Документ загружается.

Оптимальное управление
Slide 141
'
&
$
%
Методы адаптивного управления (XIX)
Общая постановка задачи ада птивного управления – 1
Пусть объект с неизвестными параметрами описывается уравнениями
˙x = f(x, u, ξ, t),
y = h(x, u, t),
где x — вектор состояния, u — управление, ξ — вектор неизвестных параметров,
y — выход, t — время.
При синтезе адаптивной системы цель управления обычно задается как
достижение экстремума некоторого функционала, или выполнение неравенства
Q(x, u, θ, t) 6 ∆,
или выполнение пр едельного соотношения
Q(x, u, θ, t) → 0 при t → ∞.
Здесь Q(x, u, θ, t) — функц ия или функционал, θ — вектор варьируемых
(подстраиваемых) параметров.
Эти соотношения называются целевыми условиями, а Q(x, u, θ, t) — целевой
функцией.
Slide 142
'
&
$
%
Методы адаптивного управления (XX)
Общая постановка задачи адаптивного управления – 2
Целевое условие, заданное в виде неравенства, должно выполняться по
прошествии определенного времени.
Минимальное время t
ad
, через которое указанное условие выполняется для
любого t > t
ad
, на зывается временем адаптации.
В зависимости от того, какие переменные доступны измерению (наблюдению) и
могут быть использованы в алгоритмах управления и адаптации, различают
следующие два класса задач:
❑ задачи адаптивного управления по состоянию,
❑ задачи адаптивного управления по выходу.
Ю. В. Тюменцев 71
Оптимальное управление
Slide 143
'
&
$
%
Методы адаптивного управления (XXI)
Общая постановка задачи адаптивного управления – 3
Задача адаптивного управления по состоянию ставится следующим образом:
при заданных уравнениях объекта и целевом условии определить алгоритм
адаптивного управления
u = U(x, θ, t),
θ = Θ(x, θ, t),
при котором адаптивная система глобально устойчива, т.е. устойчива по
Ляпунову и все переменные ограничены при любом начальном условии, а также
выполняется целевое условие.
Первое из приведенных соотношений н азывается алгоритмом управления и
является алгоритмом управления основного контура, а второе — алгоритмом
адаптации.
Название «адаптивное управление по состоянию» обусловлено тем, что в
алгоритме управления и в алгоритме адаптации используются фазовые
координаты. Предполагается, что они доступны изм ерению или вычислению.
Slide 144
'
&
$
%
Методы адаптивного управления (XXII)
Общая постановка задачи ада птивного управления – 4
Задача адаптивного управления по выходу ставится следующим образом: при
заданных уравнениях объекта и целевом условии определить алгоритм
адаптивного управления
u = U(y, θ, t),
θ = Θ(y, θ, t),
при котором адаптивная система глобально устойчива и выполняется целевое
условие.
Ю. В. Тюменцев 72
Оптимальное управление
Slide 145
'
&
$
%
Методы адаптивного управления (XXIII)
Общая характеристика методов синтеза адаптивных систем
управления – 1
Прежде чем перейти к конкретным методам синтеза адаптивных систем
управления, рассмотрим общие пр и нц и пы по строения алгоритмов адаптивного
управления.
Процедуру построения алгоритмов адаптивного управления можно разби ть на
следующие три этапа:
1) определение алгоритма уп равления, включающего варьи-
руемые параметры;
2) определение алгоритма адаптации, обеспечивающего
нужную настройку варьируемых параметров регулятора;
3) исследование синтезированной адаптивной системы
управления.
Slide 146
'
&
$
%
Методы адаптивного управления (XXIV)
Общая характеристика методов синтеза адаптивных систем
управления – 2
Решение задачи синтеза алгоритма управления основного контура (этап 1)
адаптивной системы, в частности, системы с эталонной моделью (ЭМ), ничем не
отличается от решения задачи синтеза обычных систем управления, за одним
исключением.
Синтез алгоритма управления адаптивной системы управления с ЭМ имеет одну
особенность, обусловленную необходимостью обеспечения регулятором
идеального слежения за выходом эталонной модели, когда параметры
регулятора идеально настроены.
Возможность синтеза такого регулятора зависит от эталонной модели.
Ю. В. Тюменцев 73
Оптимальное управление
Slide 147
'
&
$
%
Методы адаптивного управления (XXV)
Общая характеристика методов синтеза адаптивных систем
управления – 3
Идеальное слежение за выходом эталонной модели в принципе возможно, если
относительный порядок r
m
ее передаточной функции W
M
не ме ньше
относительного r
0
передаточной функции объекта W
0
(r
m
> r
0
).
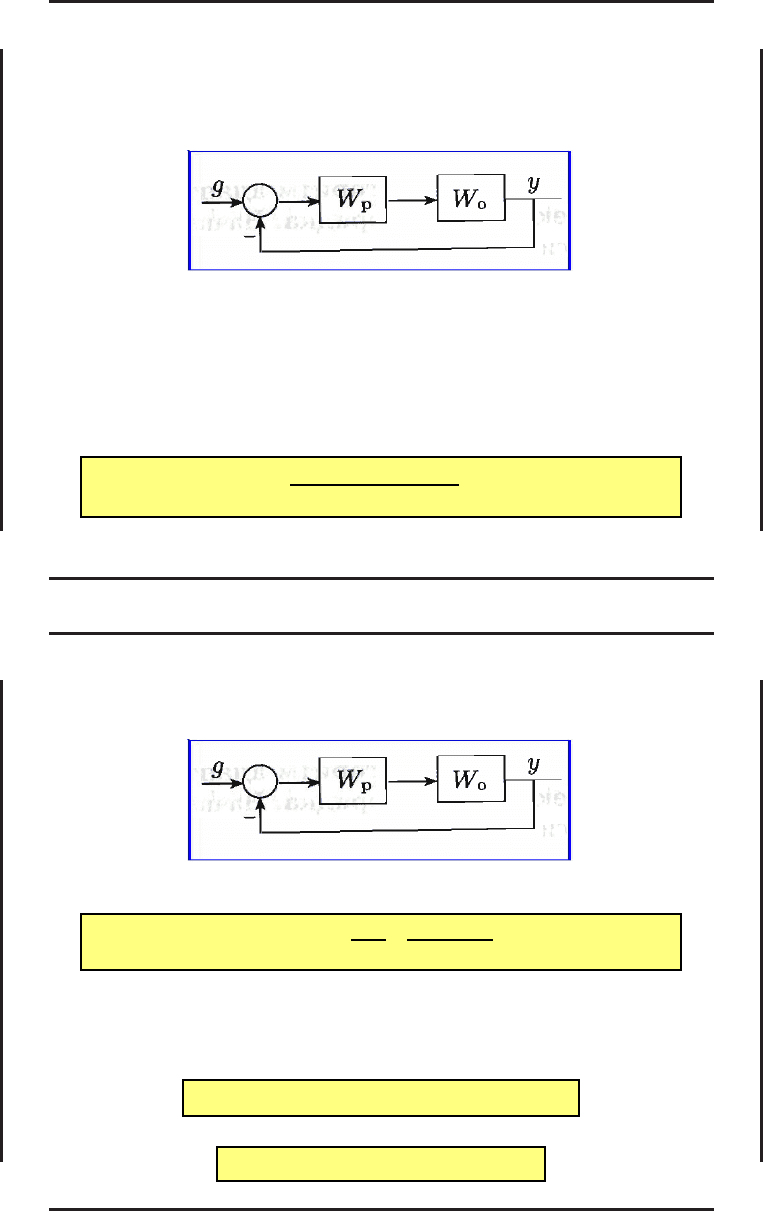
Действительно, если при заданной передаточной функции объекта W
0
произведен синтез регулятора (см. рис.) и синтезированная система идентична
эталонной модели с передаточной функцией W
M
, то должно выполняться
равенство
W
yg
(p) =
W
p
(p)W
0
(p)
1 + W
p
(p)W
0
(p)
= W
M
(p).
Slide 148
'
&
$
%
Методы адаптивного управления (XXVI)
Общая характеристика методов синтеза адаптивных систем
управления – 4
Разрешив полученное равенство относительно передаточной функции
регулятора, получим
W
p
(p) =
1
W
0
·
W
M
1 − W
M
.
Отсюда относительный по рядок регулятора r может быть представлен в виде
r = r
m
− r
0
.
Из условия физической осуществимости относительный порядок регулятора не
должен быть отрицательным, т.е.
r
p
= r
m
− r
0
> 0,
или
r
m
> r
0
.
Ю. В. Тюменцев 74
Оптимальное управление
Slide 149
'
&
$
%
Методы адаптивного управления (XXVII)
Общая характеристика методов синтеза адаптивных систем
управления – 5
Адаптивные системы управления являются нел и нейными, поэтому основным
методом исследования таких систем является метод функций Ляпунова.
Более того, этот метод используется уже в процессе синтеза.
Многие алгоритмы адаптивного управления были получены исходя из того, что
некоторая выбранная функция является функ ц и ей Ляпунова для синтезируемой
системы.
При исследовании систем управления методом функций Ляпунова уравнения
системы должны быть записаны в отклонениях, т.е. переменных, при которых
положению равновесия системы соответствует начало координат.
Если уравнения системы в исходном виде представлены по-другому, требуется
предварительно преобразовать их.
Slide 150
'
&
$
%
Алгоритмы адаптивного управления с ЭМ (I)
Задачу синтеза адаптивной системы управления с эталонной моделью
(ЭМ) можно сформулировать содержательно следующим образом.
Требуется синтезировать алгоритм адаптивного упра вления, т.е.
алгоритм управления (основного контура) и алгоритм адаптации, при
которых система глобально устойчива и ошибка слежения (разность
между выходными сигналами основного контура и эталонной модели)
сходится к нулю
Здесь предполагается, что эталонная модель задана. Она должна быть
определена исходя из требований к синтезируемой системе. Это обычная
задача управления, не связанная прямо со спецификой адаптивного
управления.
Ю. В. Тюменцев 75
Оптимальное управление
Slide 151
'
&
$
%
Алгоритмы адаптивного управления с ЭМ (II)
Алгоритм адаптивного управления линейным объектом
первого порядка – 1
Начнем изучение метода синтеза адаптивных систем с ЭМ со случа я, когда объект
описывается линейным уравнением 1-го п орядка
˙y + a
0
y = b
0
u, (111)
где y — выход, u — вход (управление), a
0
, b
0
— неизвестные параметры, знак
параметра b
0
известен.
Пусть на основании заданных требований к синтезируемой системе выбрана
эталонная модель, которая описывается уравнением
˙y
m
+ α
0
y
m
= β
0
g(t), (α
0
, β
0
> 0), (112)
где y
m
— выход эталонной модели, g(t) — задающее воздействие, которое
предполагается ограниченным.
Slide 152
'
&
$
%
Алгоритмы адаптивного управления с ЭМ (III)
Алгоритм адаптивного управления линейным объектом
первого порядка – 2
Требуется найти алгоритм адаптивного управления, при котором ошибка
слежения стремится к нулю при t → ∞:
e(t) = y(t) − y
m
→ 0 при t → ∞ (113)
и система глобально устойчива.
Ю. В. Тюменцев 76
Оптимальное управление
Slide 153
'
&
$
%
Алгоритмы адаптивного управления с ЭМ (IV)
Алгоритм адаптивного управления линейным объектом
первого порядка – 3
Утверждение. Алгоритмом адаптивного управления с ЭМ (112) объектом
(111), обеспечивающим глобальную устойчивость и выполнение целевого
условия (113), является алгоритм управления
u = k
y
y + k
g
g (114)
совместно с алгоритмом адаптации
˙
k
y
= −sign(b
0
)γye,
˙
k
g
= −sign(b
0
)γge, (115)
где k
y
, k
g
— варьируемые параметры, γ — произвольная положительная
константа.
Slide 154
'
&
$
%
Алгоритмы адаптивного управления с ЭМ (V)
Алгоритм адаптивного управления линейным объектом
первого порядка – 4
Как отмечалось, при адаптивном управлении с ЭМ одним из основных
требований является возможность принятия варьируемыми параметрами
регулятора идеальных значений, т.е. таких значений, при которых уравнение
основного контура совпадает с уравнением эталонной модели.
Покажем, что алгоритм (114) удовлетворяет этому условию.
Подставив выражение для управления (114) в уравнение объекта (111), получим
уравнение основного контура
˙y + (a
0
− b
0
k
y
)y = b
0
k
g
g, (116)
Это уравнение совпадает с ур авнением эталонной модели (112), когда
k
y
= k
∗
y
=
a
0
− α
0
b
0
, k
g
= k
∗
g
=
β
0
b
0
. (117)
Ю. В. Тюменцев 77
Оптимальное управление
Slide 155
'
&
$
%
Алгоритмы адаптивного управления с ЭМ (VI)
Алгоритм адаптивного управления линейным объектом
первого порядка – 5
Дальше, чтобы можно было использовать метод функций Ляпу но ва,
преобразуем уравнения синтезированной системы у правления в уравнения в
отклонениях, т.е. в переменных e, ∆k
y
, ∆k
g
, где
∆k
y
= k
y
− k
∗
y
, ∆k
g
= k
g
− k
∗
g
. (118)
Так как k
∗
y
и k
∗
g
являются константами, алгорит м адаптации (115) м ожно
записать в виде:
∆
˙
k
y
= −sign(b
0
)γye, ∆
˙
k
g
= −sign(b
0
)γge. (119)
Slide 156
'
&
$
%
Алгоритмы адаптивного управления с ЭМ (VII)
Алгоритм адаптивного управления линейным объектом
первого порядка – 6
Для получения уравнения для переменной e вычтем из уравнения основного
контура (116) уравнение эталонной модели (112 ):
˙e + (a
0
− b
0
k
y
)y − α
0
y
m
= b
0
k
g
g − β
0
g.
Прибавив и вычитая из левой части α
0
y, получим
˙e + α
0
e − b
0
k
y
−
a
0
− α
0
b
0
y = b
0
k
g
−
β
0
b
0
g.
Учитывая обозначения (117) и (118), последнее уравнение можно представить в
виде
˙e = −α
0
e + b
0
(∆k
y
y + ∆k
g
g). (120)
Итак, адаптивная система управления в новых переменных описывается
уравнениями (119) и (120).
Ю. В. Тюменцев 78
Оптимальное управление
Slide 157
'
&
$
%
Алгоритмы адаптивного управления с ЭМ (VIII)
Алгоритм адаптивного управления линейным объектом
первого порядка – 7
В качестве кандидата на функцию Ляпунова рассмотрим квадратичную форму
V (e, ∆k) =
1
2
e
2
+
|b
0
|
γ
∆k
2
y
+ ∆k
2
g
, (121)
где ∆k = (∆k
y
∆k
g
)
T
. Производная от этой функции имеет вид
˙
V = e ˙e +
|b
0
|
γ
∆k
y
∆
˙
k
y
+ ∆k
g
∆
˙
k
g
.
Подставив в правую часть выражения для производных из уравнений адаптивной
системы управления (119) и (120), получим
˙
V = −α
0
e
2
6 0.
Slide 158
'
&
$
%
Алгоритмы адаптивного управления с ЭМ (IX)
Алгоритм адаптивного управления линейным объектом
первого порядка – 8
Таким образом, квадратичная фо рма (121)
V (e, ∆k) =
1
2
e
2
+
|b
0
|
γ
∆k
2
y
+ ∆k
2
g
,
является функци е й Ляпунова для синтезированной системы и эта система
устойчива по Ляпунову.
Так как V (e, ∆k) > 0 (положительно определена) и
˙
V 6 0, функ ц ия
V (e, ∆k) и соответственно переменные e, ∆k
y
(k
y
), ∆k
g
(k
g
) являются
ограниченными.
Кроме того, квадратичная форма V (e, ∆k) ка к функция времени стремится к
конечному пределу при t → ∞.
Ю. В. Тюменцев 79
Оптимальное управление
Slide 159
'
&
$
%
Алгоритмы адаптивного управления с ЭМ (X)
Алгоритм адаптивного управления линейным объектом
первого порядка – 9
Так как по условию задачи задающее воздействие g(t) ограничено, то, как
следует из соотношения (120)
˙e = −α
0
e + b
0
(∆k
y
y + ∆k
g
g),
производная ˙e и, соответственно, вторая производная
¨
V = 2α
0
e ˙e ограничены.
Следовательно, первая производная
˙
V равномерно непрерывна,
˙
V → 0 и, как
следствие, e(t) → 0 при t → ∞.
Из проведенного анализа следует, что ограниченность переменных и сходимость
ошибки слежения e(t) к нулю гарантируется при любых положительных γ, α
0
и β
0
.
Slide 160
'
&
$
%
Алгоритмы адаптивного управления с ЭМ (XI)
Алгоритм адаптивного управления линейным объектом
первого порядка – 10
Параметрическая сходимость – 1
При адаптивном управлении с ЭМ основное целевое условие — обеспечение
сходимости к нулю ошибки слежения e(t) = y(t) − y
m
(t).
Если параметры р е гулятора принимают идеальные значения, то, естественно,
это условие будет выполнено.
Однако из сходимости к нулю ошибки слежения не следует параметрическая
сходимость, т.е. сходимость варьируемых параметров к идеальным з начениям.
Ю. В. Тюменцев 80