Тюменцев Ю.В. Оптимальное управление. Лекции-Слайды
Подождите немного. Документ загружается.

Оптимальное управление
Slide 361
'
&
$
%
Адаптивное управление с ИМ (I)
Расширение состава схем адаптивного управления
Ранее были введены в рассмотрение две схемы адаптивного управления (схема с
эталонной моделью (ЭМ) и схема с прогнозирующей моделью (ПМ)), которые
оценивались с точки зрения их использования для управления движением ЛА.
Как показал проведенный анализ, возможностей этих двух классов систем
адаптивного управления не всегда достаточно для решения рассматриваемых
задач управления движением ЛА с требуемым качеством.
Наряду с дальнейшим совершенствованием схем с ЭМ и ПМ, осуществляемой за
счет привлечения более мощных средств НС-моделирования, представляется
целесообразным также расширить перечень рассматриваемых схем адаптивного
управления.
Один из очевидных кандидатов на включение в такой расширенный перечень —
это схема с инверсно й моделью (ИМ).
Схему управления с ИМ можно представить в двух вариантах: неадаптивном и
адаптивном, точно так же, как это имеет место и для схем управления с ЭМ и
ПМ.
Slide 362
'
&
$
%
Адаптивное управление с ИМ (II)
Неадаптивная схема управления с ИМ – 1
Неадаптивная схема управл ения с ИМ, известная в теории управления как система с
косвенным измерением возмущений, исследовалась на устойчивость и робастность при
управлении нелинейными объектами и продемонстрировала возможность достижения
высокого качества управления.
Объект
управления
+
−
Инверсная
НС-модель
объекта
Прямая
НС-модель
объекта
Фильтр
g(t)
u(t)
y(t)
b
y(t)
ε
m
(t)
r(t)
ξ(t)
u(t)
−
+
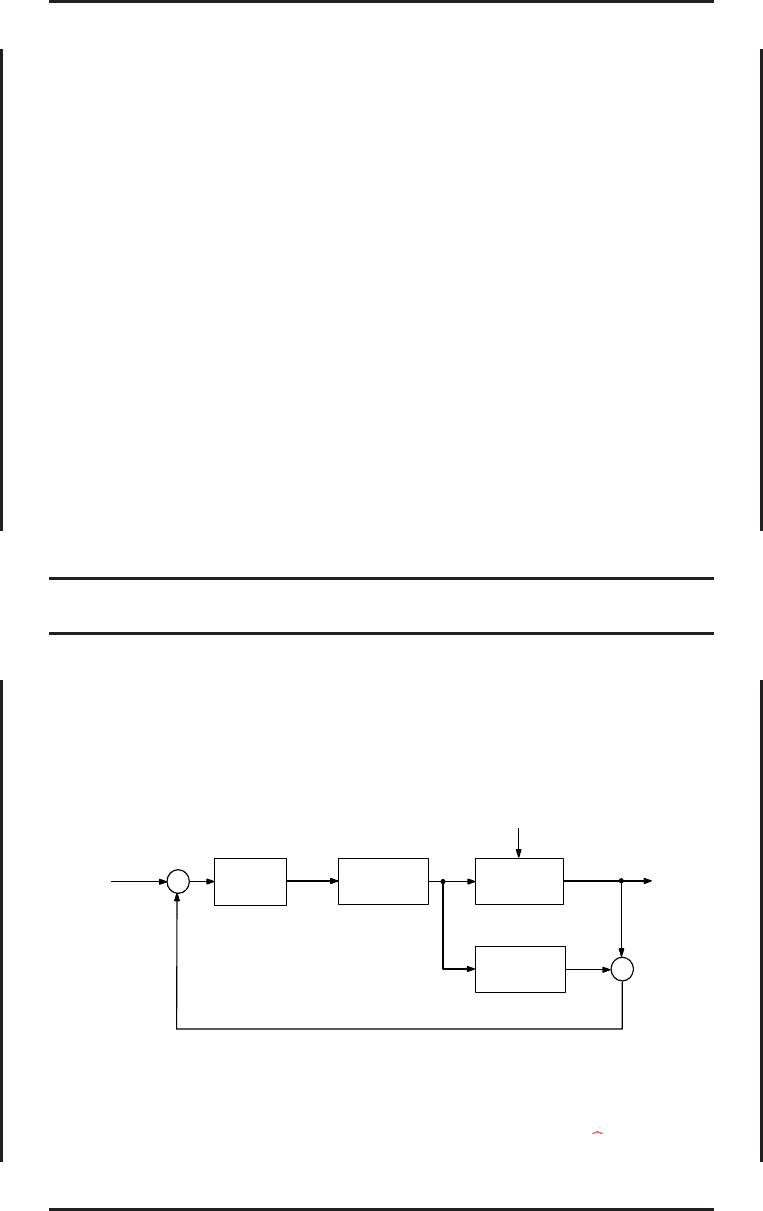
Структурная схема системы управления с прямой и инверсной
НС-моделями объекта управления
Здесь: r(t) — задающее воздействие; ξ(t) — возмущающе е воздействие; g(t) — сигнал на
выходе фильтра; u(t) — управлени е; y(t) — выход объекта управления; y(t) — выход
нейросетевой модели объекта управления; ε
m
(t) — расхождение между выходами объекта
управления и НС-модели.
Ю. В. Тюменцев 181
Оптимальное управление
Slide 363
'
&
$
%
Адаптивное управление с ИМ (II)
Неадаптивная схема управления с ИМ – 2
Помимо инверсной НС-модели, в состав систем управ ления с ИМ входит также и прямая
НС-модель объекта управления (э то точно такая же модель объекта, которая входила в
состав систем управле ния с ЭМ и ПМ).
При соответствующем выборе операторов для элементов системы (т.е. фильтра, прямой и
инверсной модели) выходная переменная y(t) воспроизводит входной (задающий) сигнал
g(t) с желаемой динамикой и не зависит от возмущени й ξ(t), приведенных к выходу
объекта управления.
Это возможно, если инверсная модель объекта управления реализует инверсный оператор
A
−1
, а прямая модель — прямой оператор A объекта управления.
Для достижен ия желаемой динамики системы в ее состав вводится фильтр, реализующий
оператор вида
A
F
= A
−1
A ,
где A
−1
— реализация инверсной моделью точного инверсного оператора A
−1
; A —
реализация прямой моделью точного прямого оператора A. В этом случае сигнал r(t)
воспроизводится на выходе объекта без искажений, т.е. y(t) ≡ r(t) и не зависит от
возмущения ζ(t), эквивалентного возмущению ξ(t) и приведенного ко входу объекта.
Slide 364
'
&
$
%
Адаптивное управление с ИМ (III)
Неадаптивная схема управления с ИМ – 3
Если прямая и инверсная модели объе к та управления реализованы точно, т.е. если
A
−1
= A
−1
и A = A,
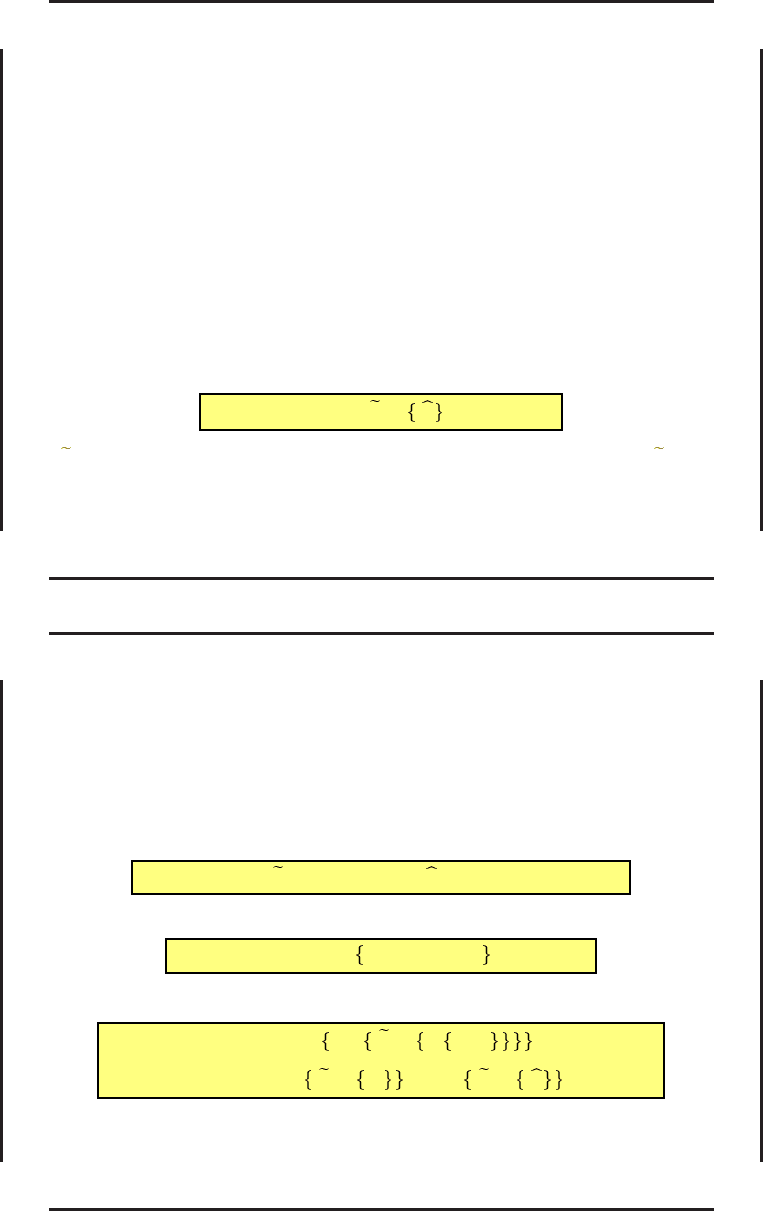
тогда
y(t) = A
F
r(t) − ε
m
(t) .
Вход и выход системы в рассматриваемом случае связаны операторным соотношением
y(t) = L
−1
A
F
A
−1
A r(t) ,
L = 1 + A
F
A
−1
A − A
F
A
−1
A
Ю. В. Тюменцев 182
Оптимальное управление
Slide 365
'
&
$
%
Адаптивное управление с ИМ (IV)
Неадаптивная схема управления с ИМ – 4
В неадаптивной системе управления с ИМ рассмотренного вида могут возникать
проблемы устойчивости и робастности из-за недостаточно точной реализации
прямой и ин версной моделей объекта управления.
Если объект управления нелинейный и мно госвязный по своей природе, к ак это
и имеет место в случае маневренного самолета или ГЗЛА, аналитическое решение
проблемы едва ли возможно, остается лишь путь вычислительного
моделирования.
Как показывает имеющийся опыт, по-настоящему эффективную реализацию
прямой и ин версной моделей, пригодных по уровню достижимой ими точности к
использованию в составе систем управления с ИМ, обеспечивает лишь
нейросетевое моделирование или же нейронечеткое моделирование, когда
аппарат искусственных нейронных сетей используется совместно с аппаратом
нечеткой логики.
Slide 366
'
&
$
%
Адаптивное управление с ИМ (V)
Адаптивная схема управления с ИМ – 1
Возможности неадаптивной системы управления с ИМ ограничиваются отс утствием
обратных связей по воспроизводимой функции r(t). Этого недостатка лишен адаптивный
вариант схемы с ИМ.
Объект
управления
+
−
Инверсная
НС-модель
объекта
Прямая
НС-модель
объекта
Фильтр
g(t)
u(t)
y(t)
b
y(t)
ε
m
(t)
r(t)
ξ(t)
u(t)
−
+
Алгоритм
обучения
Алгоритм
обучения
θ
inv
θ
dir
ε(t)
r(t)
b
y(t)
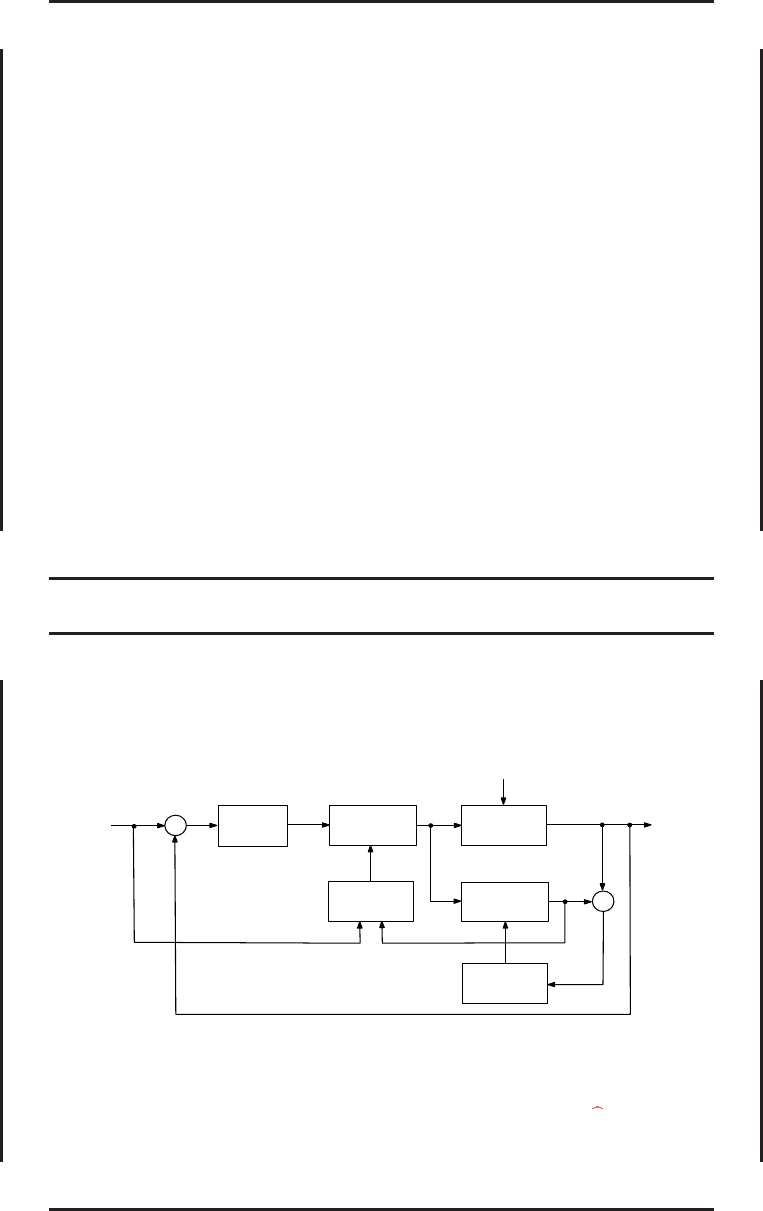
Структурная схема адаптивной системы управления с прямой и ин версной
НС-моделями объекта управления
Здесь: r(t) — задающее воздействие; ξ(t) — возмущающе е воздействие; g(t) — сигнал на
выходе фильтра; u(t) — управлени е; y(t) — выход объекта управления; y(t) — выход
нейросетевой модели объекта управления; ε
m
(t) — расхождение между выходами объекта
управления и НС-модели; ε(t) — расхождение между выходами объекта управления и
задающим воздействие; θ
dir
и θ
inv
— параметры прямой и инверсной модели объекта
управления, соответственно.
Ю. В. Тюменцев 183
Оптимальное управление
Slide 367
'
&
$
%
Адаптивное управление с ИМ (VI)
Адаптивная схема управления с ИМ – 2
Адаптивная система управления, построенная по схеме с И М, включает две
динамически настраиваемые модели, прямую и инверсную.
По указанным ранее причинам обе эти модели наиболее целесообразно
реализовывать в классе динамически обучаемых НС-моделей.
В алгоритме обучения инверсной модели используются текущие измерения
воспроизводимой (задающей) функции r(t) и выхода прямой модели объекта
y(t).
Прямая модель выполняется также в виде динамической сети, обучаемой по
прогнозу ошибки ε
m
(t).
Slide 368
'
&
$
%
Адаптивное управление с ИМ (VII)
Адаптивная схема управления с ИМ – 3
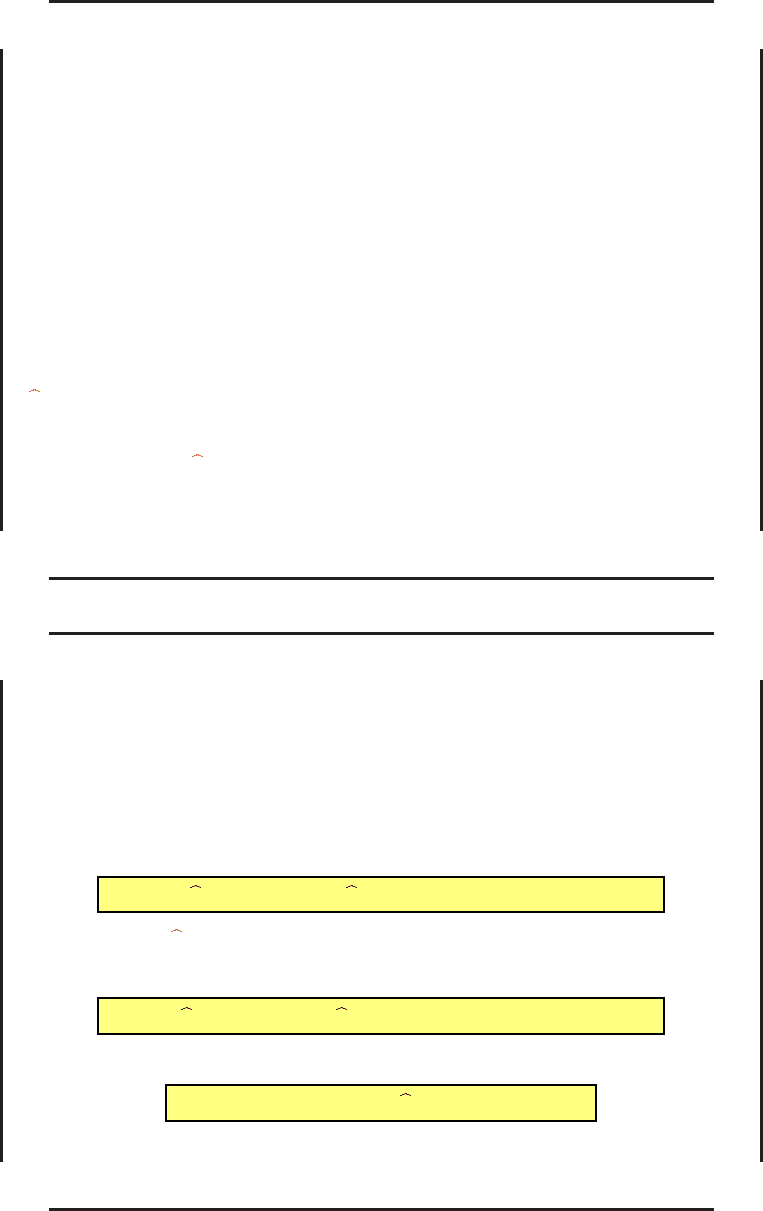
Предельные динамические свойства рассматриваемой системы вытекают из
следующих рассуждений. Для обучения прямой модели ошибка определяется
соотношением
ε
m
(t) = y(t) − y(t) → 0, при t > 0,
так что y(t) → y(t).
При настройке инверсной модели используется ошибка обучения
ε
m
(t) = g(t) − y(t) → 0, при t → ∞.
Следовательно,
y(t) → g(t) и y(t) → g(t).
Ю. В. Тюменцев 184
Оптимальное управление
Slide 369
'
&
$
%
Адаптивное управление с ИМ (VIII)
Адаптивная схема управления с ИМ – 4
Если A — оператор объекта управления, A
c
— оператор инверсной м одели, а
A
m
— оператор прямой модели, то цепочка предельных переходов при
обучении сетей
y(t) → y(t) → g(t) при t → ∞
осуществляется тогда, когда
A
c
= A
−1
m
= A
−1
.
В результате настройки, проведенной описываемым способом, получается
инверсная модель объекта управления, которая выполняет ф ункцию адаптивного
нейроконтроллера.
Адаптивность этой системы проявляется в том, что для ее структурного синтеза
требуется минимум априорной информации об объекте, кроме того, обе
модели, прямая и инверсная (т.е. нейроконтроллер), подстраиваются
непосредственно в процессе функционирования системы при неконтролируемых
изменениях динамики объекта управления.
Slide 370
'
&
$
%
Адаптивное управление с ИМ (IX)
Адаптивная схема управления с ИМ – 5
Проведенный анализ схемы адаптивного управления с инверсной моделью
показывает, что данная схема представляет безусловный интере с с точки зрения
задач управления движением ЛА, если удастся получить достаточно точные
модели объекта управления — прямую и, особенно, инверсную.
При этом следует учитывать, что динамика о бъекта может меняться резко и
непредсказуемо непосредственно в полете, в частности, из-за отказов
оборудования и повреждений конструкции.
Следовательно, необходимо располагать не только средствами построения
достаточно точных ИМ и ПМ на этапе структурного синтеза системы управления,
но и средствами оперативной корр е ктировки этих моделей непосредственно в
ходе полета.
Ю. В. Тюменцев 185