Тюменцев Ю.В. Оптимальное управление. Лекции-Слайды
Подождите немного. Документ загружается.


Оптимальное управление
Slide 281
'
&
$
%
Необходимость использования
адаптивно-робастных механизмов в системе
управления движением ЛА (I)
Традиционная теория управления, включая и теорию оптимального
управления, требует знания математической модели объекта, входящих в
эту модель параметров и характеристик объекта, а также параметров и
характеристик среды, в которой данный объект функционирует.
На практике зачастую трудно обеспе чить достаточно точное
математиче ское описание объекта управления и точное знание всех
необходимых величин. Более того, параметры и характеристики объекта
и среды в процессе функционирования могут значительно изменяться,
причем непредсказуемым заранее образом. В этих случаях
традиционные методы часто оказываются либо неприменимыми, либо
дают неудовлетворительные результаты.
Slide 282
'
&
$
%
Необходимость использования
адаптивно-робастных механизмов в системе
управления движением ЛА (II)
Обычные (традиционные) системы управления не справляются с поставленной
задачей, к ак правило, в следующих основных случаях:
❑ когда н ачальной (априорной) инф орма ц и и об объекте и условиях его
функционирования недостаточно для построения его полной и точной модели;
❑ когда пара метры и характеристики объекта в процессе функционирования
изменяются непредвиденным образом в широких пределах, например, для
летательного аппарата, при отказах в его системах и/или повреждениях его
конструкции.
Именно такая ситуация характерна для задачи управления движением ЛА. При ее
решении необходимо принимать во вним ание наличие неопределенностей в
параметрах и характеристиках ЛА, изменение этих параметров и характеристик в
ходе полета в з начительных пределах, в том числе и внезапные изменения
динамических свойств ЛА из-з а отказов и повреждений, а также наличие
неопределенностей в характеристика среды (турбулентность, ветер, случайные
вариации значений параметров атмосферы).
Ю. В. Тюменцев 141

Оптимальное управление
Slide 283
'
&
$
%
Необходимость использования
адаптивно-робастных механизмов в системе
управления движением ЛА (III)
Как показывает анализ, наиболее привлекательным в данной ситуации
является путь построения у правляющих систем, не требующих полного
априорного знания объекта управления и условий его функционирования.
Такая система сама должна отыскивать з акон управления, адекватный
текущей ситуации, т. е. она должна быть в состоянии приспосабливаться
к меняющимся условиям функционирования.
Этим т ребованиям наиболее полно отвечают адаптивные системы.
Систему управления можно считать ад аптивной, только если в ней
текущая информация, помимо выработки управ ляющего воздействия,
используется также и д ля изменения (корректир овки) алгоритма
управления. В отличие от этого, в обычных (неадаптивных) системах
управления текущая информация используется только для формирования
управляющего воздействия.
Slide 284
'
&
$
%
Необходимость использования
адаптивно-робастных механизмов в системе
управления движением ЛА (IV)
Для адаптивных систем характерно такое исключительно полезное свойство, как
возможность единообразного учета и парирования большого числа разнообразных
факторов неопределенности, изменяющихся в значительных пределах, причем
набор этих факторов может постоянно меняться. Адаптивная система обладает
способностью самостоятельно подстроиться под изменившуюся ситуацию, в том
числе и под изменившийся состав и свойства факторов неопределенности.
Традиционные системы управления такими свойствами, как правило, не обладают.
Для адаптивных систем очень важным является придание им соответствующего
уровня робастности. Это связано с тем, что на адаптацию системы к
изменившейся ситуации требуется определенное время, в течение которого
система не должна выйти на нештатные режимы функционирования. Запас
робастности, который должен быть у адаптивной системы, обеспечивает
выполнение данного условия.
Поскольку все перечисленные выше факторы имеют существенное значение при
решении задач управления движением ЛА, наиболее целесообразно строить
систему управления таким движением как адаптивно-робастную.
Ю. В. Тюменцев 142

Оптимальное управление
Slide 285
'
&
$
%
Общая структура нейросетевой модели движения
ЛА на основе многослойной нейронной сети (I)
Многие схемы адаптивного управления требуют наличия модели объекта
управления.
Получение такой модели составляет содержание классической задачи
идентификации динамических систем.
Один из наиболее эффективных подходов к решению данной задачи
применительно к нелинейным системам является, как показывает опыт,
использование методов и средств искусственных нейронных сетей. Нейросетевое
моделирование позволяет строить достаточно точные и эффективные в
вычислительном плане модели (НС-модели).
Основа вычислительной эффективности НС-моделей состоит в том, что
искусственная нейронная сеть представляет собой алгоритмически универсальную
математическую модель, с помощью которой можно с любой наперед заданной
точностью представить любое нелинейное отображение ϕ : R
n
→ R
m
, т. е.
любую нелинейную зависимость между n-мерным вектором входных дан ных и
m-мерным вектором выходных данных.
Slide 286
'
&
$
%
Общая структура нейросетевой модели движения
ЛА на основе многослойной нейронной сети (II)
Модели объекта управления, которые необходимы для формирования
систем адаптивного управ ления, рассматриваемых далее, по указанным
причинам часто ф ормируют именно в виде НС-моделей. Отсюда следует,
что в к ачестве подзадачи синтеза ада птивного закона управления
необходимо было решить задачу идентификации для рассматриваемого
объекта у пр авления, предполагаемого нелинейным, т. е. требовалось
получить нейросетевую аппроксимацию исходной математической модели
движения самолета, заданную в той или иной форме, чаще всего в виде
системы дифференциальных уравнений.
Ю. В. Тюменцев 143
Оптимальное управление
Slide 287
'
&
$
%
Общая структура нейросетевой модели движения
ЛА на основе многослойной нейронной сети (III)
Объект
управления
НС-
модель
Алгоритм
обучения
u y
p
+
−
ε
y
m
ξ
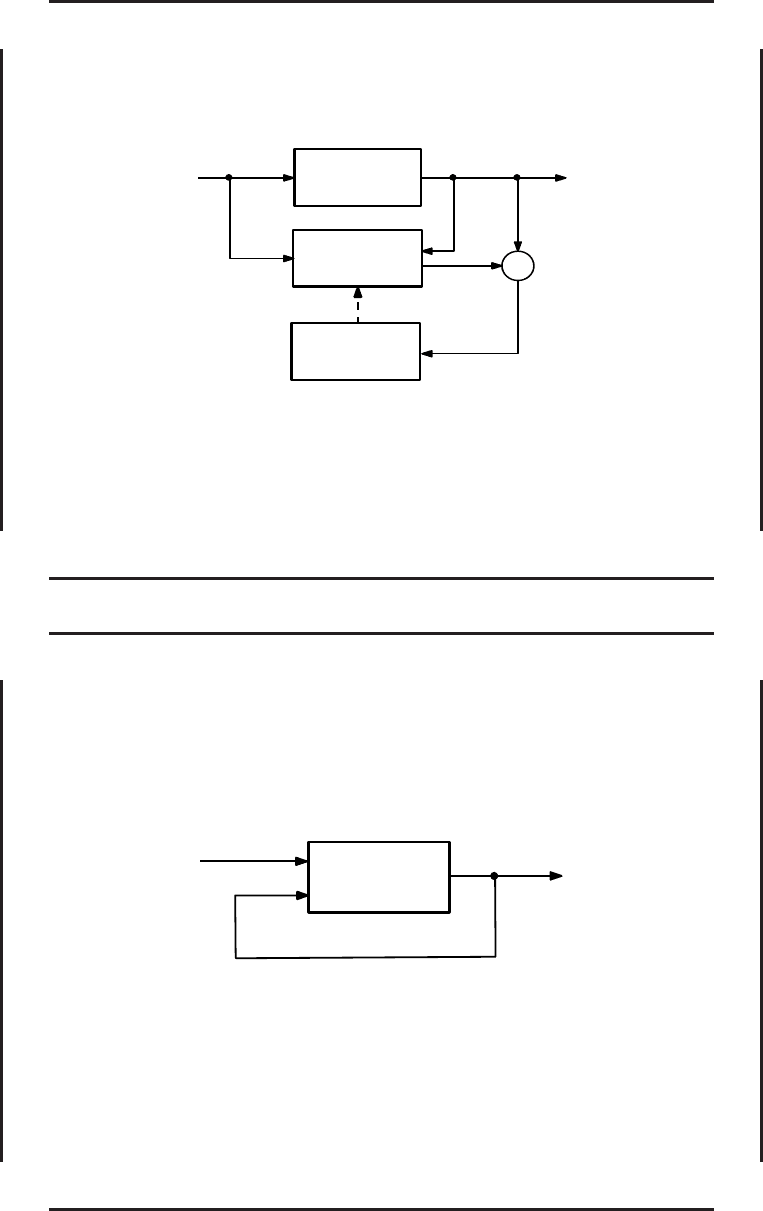
Схема нейросетевой идентификации объекта управления
Здесь обозначено: u — управление, y
p
— выход объекта управления, y
m
—
выход нейросетевой модели объекта управления; ε — расхождение между
выходами объекта управления и НС-модели; ξ — корректирующее воздействие
Slide 288
'
&
$
%
Общая структура нейросетевой модели движения
ЛА на основе многослойной нейронной сети (IV)
После получения НС-модели, она работает автономно в соответствии со
следующей схемой:
b
y
НС-модель
объекта
u
b
y
Автономная работа нейросетевой модели объекта управления
Полученная нейросетевая модель объекта управления используется далее для
разработки системы управления (нейроконтроллера). В рассматриваемых
вариантах для обеих принятых схем адаптивного управления, принятых к
первоочередному исследованию, используется одна и та же НС-модель объекта
управления.
Ю. В. Тюменцев 144

Оптимальное управление
Slide 289
'
&
$
%
Общая структура нейросетевой модели движения
ЛА на основе многослойной н ейронной сети (V)
В качестве сигнала ошибки ε, направляющего обучение НС-модели, используется
квадрат разности между выходом объекта управления y
p
и нейросетевой модели
y
m
, находящихся под воздействием сигнала управления u. Обученная НС-модель
реализует схему вычислений рекуррентного типа, в которой для вычисления
значения выхода y для момента времени t
i+1
используются значения y и u в
момент времени t
i
.
В качестве модели динамического объекта была выбрана нелинейная
авторегрессионная сеть типа NARX с внешними входами (Nonlinear AutoRegressive
network with eXogeneous inputs) как отвечающая характеру ра ссматриваемой
задачи управления полетом ЛА. Она представляет собой рекуррентную
динамическую слоистую Н С-модель с обратными связями между слоями и с
элементами задержки (TDL) на входах сети (см. рис. 290). Модель типа NARX
является обобщением известной линейной авторегрессионной модели ARX,
которая часто используется в за дачах моделирования временных рядов.
Slide 290
'
&
$
%
Общая структура нейросетевой модели движения
ЛА на основе многослойной нейронной сети (VI)
T
D
L
T
D
L
n
1
(t)
n
2
(t)
a
1
(t)
a
2
(t) =
b
y(t)
1
b
1
1
b
2
p
1
(t) = u(t)
IW
1,1
Σ
Σ
LW
2,1
LW
1,3
f
1
f
2
Входы
Слой 1
Слой 2
Структурная схема н ейросетевой NARX-модели объекта управления
TDL — линия задержки; IW — матрица синаптических весов связей между в ходным и первым
обрабатывающим слоем НС; LW — матрица синаптических весов связей между
обрабатывающими слоями НС; b — набор смещений слоя НС; f — набор активационных
функций слоя НС; Σ — набор сумм аторов слоя НС; n(t) — набор скалярных выходов
сумматоров; a(t) — набор скалярных выходов активационных функций; p
1
(t) = u(t) —
входной сигнал; y(t) — выход НС-модели
Ю. В. Тюменцев 145

Оптимальное управление
Slide 291
'
&
$
%
Общая структура нейросетевой модели движения
ЛА на основе многослойной нейронной сети (VII)
NARX-модель реализует динамическое отображение, описываемое разностным
уравнением следующего вида:
y(t) = f(y(t−1), y(t−2), . . . , y(t−N
y
), u(t−1), u(t−2), . . . , u(t−N
u
)),
(168)
где значение выходного сигнала y(t) для данного момента времени t вычисляется
на основе значений y(t − 1), y(t − 2), . . . , y(t − N
y
) этого сигнала для
последовательности предшествующих моментов времени, а также значений
входного (управляющего) сигнала u( t − 1), u(t − 2), . . . , u(t − N
u
), внешнего
по отношению к NARX-модели. В общем случае длина предыстории по выходам и
управлениям может не совпадать, т. е. N
y
6= N
u
.
Slide 292
'
&
$
%
Общая структура нейросетевой модели движения
ЛА на основе многослойной нейронной сети (VIII)
Удобным способом реализации NARX-модели является использование
многослойной сети прямого распространения мультиперсептронного типа для
приближенного представления отображения f(·) в соотношении (168), а также
линий задержки (TDL-элементов) для получения значений величин
y(t − 1), y(t − 2), . . . , y(t − N
y
) и u(t − 1), u(t − 2), . . . , u(t − N
u
).
Конкретный вид нейросетевой реализации NARX-модели, которая использовалась
для моделирования движения ЛА, показан на рис. 290. Видно, что данная
NARX-модель представляет собой двухслойную сеть. В ней активационные
функции скрытого слоя являются нелинейными (сигмоиды), а выходного слоя —
линейными.
Ю. В. Тюменцев 146

Оптимальное управление
Slide 293
'
&
$
%
Общая структура нейросетевой модели движения
ЛА на основе многослойной нейронной сети (IX)
D
D
D
x(t) x
1
(t) = x(t)
x
2
(t) = x(t − 1)
x
3
(t) = x(t − 2)
x
N
(t) = x(t − N + 1)
Структурная схема TDL-элемента для нейросетевых моделей
D — элемент задержки; x(t) — входной сигнал TDL-элемента;
x
i
= x(t − i − 1), i = 1, 2, . . . , N — выходные сигналы TDL-элемента
Slide 294
'
&
$
%
Общая структура нейросетевой модели движения
ЛА на основе многослойной нейронной сети (X)
T
D
L
T
D
L
НС
прямого
распространения
u(t)
y(t)
y(t)
(a)
T
D
L
T
D
L
НС
прямого
распространения
u(t)
b
y(t)
y(t)
(b)
Общая структура нейросетевой NARX-модели:
(a) модель с параллельной архитектурой;
(b) модель с последовательно-параллельной архитектурой
Ю. В. Тюменцев 147

Оптимальное управление
Slide 295
'
&
$
%
Общая структура нейросетевой модели движения
ЛА на основе многослойной нейронной сети (XI)
Процесс обучения NARX-модели в рассматриваемом случае может быть построен одним из
двух способов.
В первом способе (параллельная архитектура, рис. (a)) выход NARX-модели можно
трактовать как оценку y(t) выхода м оделируемой нелинейн ой системы. Эта оценка подается
с помощью обратной связи через TDL-элемент на в ход NARX-модели для предсказания
следующего состояния y(t + 1) систем ы .
Во втором способе (последовательно-параллельная архитектура, рис. (b)) учитывается тот
факт, что обучение нейросетевой NARX-модели осуществляется с учителем, т. е. доступна
информация не только о входах модели u(t), но и о значениях y(t) выходов системы,
отвечающих данным значениям входов. Соответственно, эти значения выходов y(t) можно
подавать на вход NARX-модели вместо их оценок y, к ак это имело место в предыдущем
варианте. У данного подхода два основных преимущества: повышается точность получаем ой
NARX-модели, а также появляется возможность и спользовать для ее обучения обычный
статический метод обратного распространения ошибки, тогда как для обучения NARX-модели
с чисто параллельной архитектурой тре буется использовать какую-либо из разновидностей
динамического метода обратного распространения ошибки.
Slide 296
'
&
$
%
Общая структура нейросетевой модели движения
ЛА на основе многослойной нейронной сети (XII)
Основной НС-моделью, используемой при формировании нейроконтроллера,
должна быть параллельная модель (замкнутая система), представляющая собой
динамическую нейронную сеть. Однако обучение динамических сетей связано с
большими проблемами. Как правило, настроить замкнутую нейросетевую модель
не получается (это актуально при обучении в реальном времени).
Поэтому для настройки НС-модели была использована схема одношагового
прогнозирования (последовательно-параллельная модель):
y
k+1
= f(u
k
, u
k−1
, . . . , u
k−d
, y
k
, y
k−1
, . . . , y
k−d
),
где y — выход нейросетевой модели, y — выход объекта управления, u — вход
объекта.
Здесь нейросеть является разомкнутой, т. е. реализует статическое отображение.
Пример обучающей выборки для такой модели показан на следующем слайде.
Ю. В. Тюменцев 148

Оптимальное управление
Slide 297
'
&
$
%
Общая структура нейросетевой модели движения
ЛА на основе многослойной нейронной сети (XIII)
10 20 30 40 50 60 70 80 90 100
−20
0
20
40
α, deg
Training data for NN plant model
10 20 30 40 50 60 70 80 90 100
−30
−20
−10
0
10
20
φ
act
, deg
t, sec
Формирование нейросетевой модели объекта управления ( самолет F-16, режим полета
с индикаторной скоростью V
i
= 500 км/ч) — обучающая выборка для НС-модели
Здесь: α — угол атаки, град.; φ
act
— командный сигнал привода органа управления;
t — время, с
Slide 298
'
&
$
%
Общая структура нейросетевой модели движения
ЛА на основе многослойной нейронной сети (XIV)
0 10 20 30 40 50 60 70 80 90 100
−20
−10
0
10
20
30
40
50
α, deg
Target
Inet output
0 10 20 30 40 50 60 70 80 90 100
−3
−2
−1
0
1
2
3
∆α, deg
t, sec
error
Формирование нейросетевой модели объекта управления ( самолет F-16, режим полета
с индикаторной скоростью V
i
= 500 к м/ч) — проверка работоспособности замкнутой
НС-модели
Здесь: α — угол атаки, град.; ∆α — ошибка (расхождение углов атаки для объекта и
НС-модели), град.; t — время, с; Target — выход объекта; Inet output — выход НС-модели;
Error — ошибка отслеживания
Ю. В. Тюменцев 149

Оптимальное управление
Slide 299
'
&
$
%
Обучение нейросетевой модели движения ЛА
в пакетном режиме ( I)
Обучение НС-модели в данном случае производится стандартным образом: проблема
рассматривается как оптимизационная, целью является минимизация ошибки e = y − y.
Целевая функция представляет собой сумму квадратов ошибок по всей обучающей выборке
E(w) =
1
2
e
T
e, e = [e
1
, e
2
, . . . , e
N
]
T
,
так как e(w) = y − ˆy(w), w — вектор н астраиваемых параметров сети, N — длина
выборки.
Оптимизация целевой функции E(w) по вектору w производится методом
Левенберга-М арквардта. Корректировка вектора w на каждом ша ге оптимизации выглядит
следующим образом:
w
n+1
= w
n
+ (J
T
J + µE)
−1
J
T
e,
где E — единичная матрица, J = J(w
n
) — якобиан ошибки по параметрам
(транспонированная матрица градиента):
J =
∂e
∂w
T
=
∂e
1
∂w
,
∂e
2
∂w
, . . . ,
∂e
N
∂w
T
.
Подразумевается, что производная скаляра по вектору является вектором той же размерности
(производная по столбцу ∂e
i
/∂w — вектор-столбец).
Slide 300
'
&
$
%
Обучение нейросетевой модели движения ЛА
в пакетном режиме ( II)
Параметр µ подбирается на к аждой итерации так, чтобы целевая функция
гарантированно уменьшалась (умн ожается на число больше единицы, пока
функция не уменьшится), а после успешной итерации параметр µ уменьшается
умножением на число, меньшее единицы. Это делается из следующих
соображений: при большом µ метод Левенберга-Марквардта переходит в
градиентный спуск с маленьким шагом, а при малом µ — в метод Ньютона
(который хорошо сходит ся вблизи минимума).
Ключевым моментом здесь является вычисление якобиана на каждом шаге. Для
этого используется алгоритм обратного распространения ошибки, что занимает
б`ольшую часть времени, затрачиваемого на обучение модели.
После завершения обучения необходимо проверить, аппроксимирует ли нейросеть
динамику системы (чтобы б ыла похожа динамика, т. е. прогноз был бы
корректным на много шагов вперед, требуется очень высокая точность
одношагового прогноза) . Тут просто моделируется замкнутая сеть на той же
выборке. Вычислительный эксперимент, показывающий поведение обученной сети,
будет рассмотрен далее.
Ю. В. Тюменцев 150