Тюменцев Ю.В. Оптимальное управление. Лекции-Слайды
Подождите немного. Документ загружается.

Оптимальное управление
Slide 321
'
&
$
%
Схемы адаптивного управления, перспективные с
точки зрения задач управления полетом ЛА —
общая характеристика (X)
Основные структурные варианты адаптивных систем – 7
В системах непрямого адаптивного управления параметры регулятора θ
c
(t)
вычисляются с помощью ура внения связи (отображения вида θ
p
(t) → θ
c
(t)) на
основании оценок θ
p
(t) для параметров объекта θ
p
(t).
Оценки θ
p
(t) вырабатываются оперативно, в процессе функционирования
объекта, путем вычисления значения производной
˙
θ
p
(t) или разности
θ
p
(t + 1) − θ
p
(t).
Slide 322
'
&
$
%
Схемы адаптивного управления, перспективные с
точки зрения задач управления полетом ЛА —
общая характеристика (XI)
Основные структурные варианты адаптивных систем – 8
b
θ
p
(t)
r(t)
y(t)
y(t)
u(t)
y(t)
u(t)
θ
c
(t)
Уравнения
связи
b
θ
p
→ θ
c
Оценивание
параметров
˙
b
θ
p
(t)
Регулятор
Ψ(r, y, θ
c
)
Объект
F(u, θ
p
)
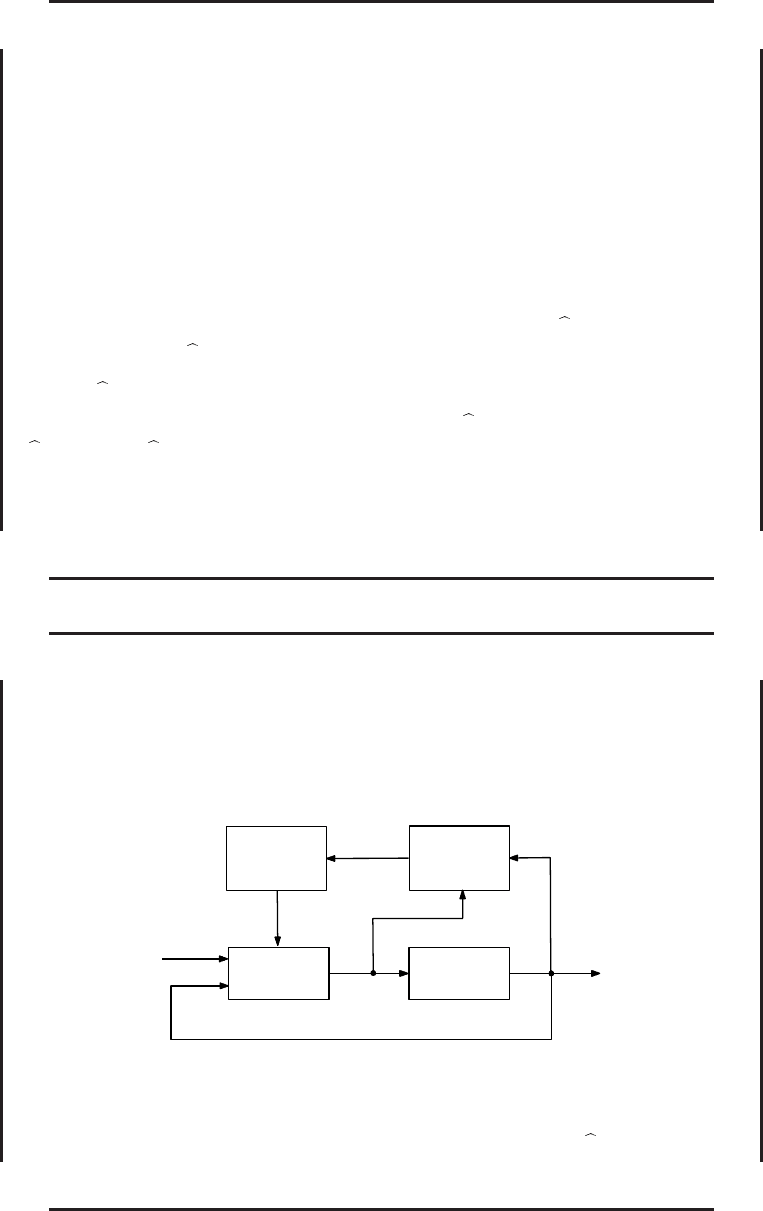
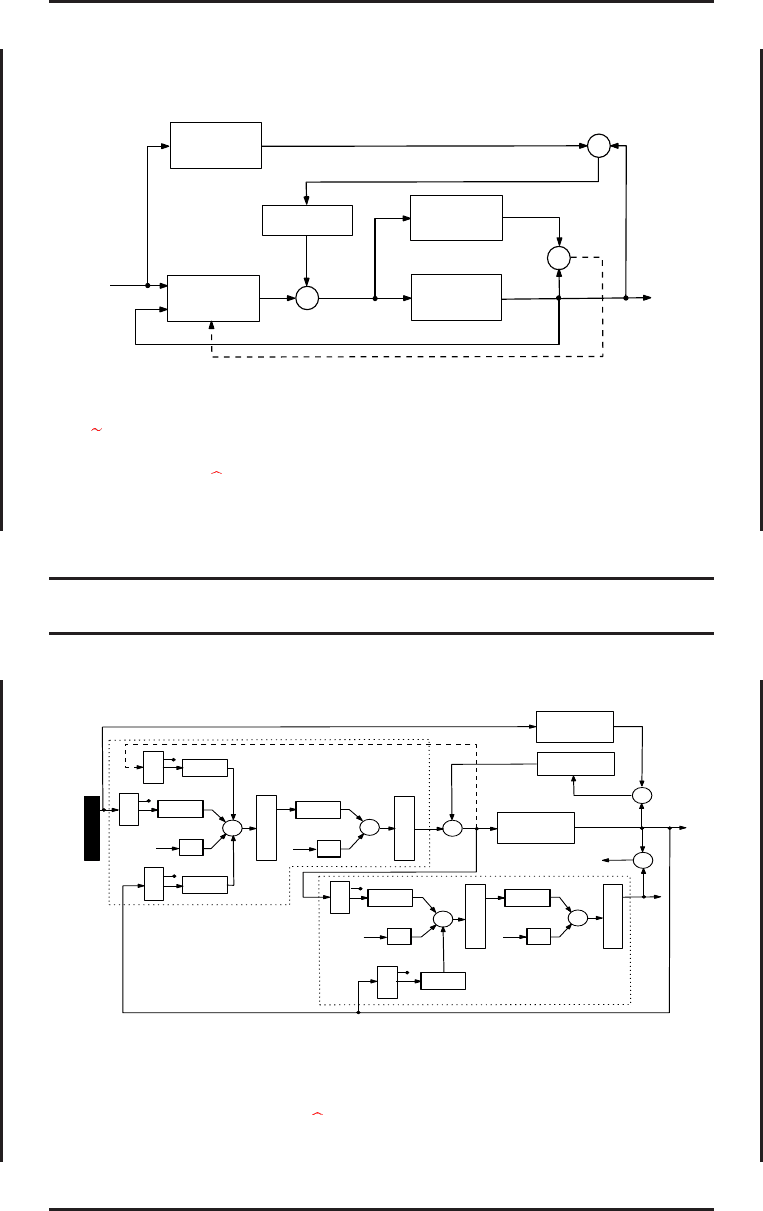
Непрямая схема адаптивного управления
Здесь: r(t) — задающее воздействие; u(t) — управление; y(t) — выход
объекта управления; θ
p
(t) — оцениваемые параметры объекта; θ
p
(t) — оценка
параметров объекта; θ
c
(t) — корректируемые параметры регулятора.
Ю. В. Тюменцев 161
Оптимальное управление
Slide 323
'
&
$
%
Схемы адаптивного управления, перспективные с
точки зрения задач управления полетом ЛА —
общая характеристика (XII)
Основные структурные варианты адаптивных систем – 9
В обеих схемах адаптивного управления, прямой и непрямой, основная идея
состоит в том, что идеальные значения параметров регулятора (при прямом
адаптивном управлении) или объекта (при непрямом адаптивном управлении)
используются так, как если бы это были параметры реального регулятора или
объекта, соответственно.
Так как реальные з н ачения указанных параметров неизбежно отличаются от
идеальных, возникает ошибка, ухудшающая к ачество управления. Один из
подходов к компенсации этой ошибки излагается далее.
Он состоит в том, чтобы данную ошибку трактовать как возмущающее
воздействие на систему и парировать это воздействие, вводя в систему
компенсирующий контур.
Slide 324
'
&
$
%
Схемы адаптивного управления, перспективные с
точки зрения задач управления полетом ЛА —
общая характеристика (XIII)
Нейросетевая реализация алгоритмов адаптивного
управления – 1
Искусственные нейронные сети с успехом применяются для решения задач
идентификации динамических систем, а также для управления такими системами.
Привлекательным инст рументом решения указан ных выше задач являются
многослойные сети персептронного типа в силу того, что они обладают
свойствами универсального аппроксиматора.
Аппроксимирующие способности НС-моделей с динами ческими алгоритмами
обучения позволяют моделировать сложные нелинейные динамические объекты
управления в виде прямых и инверсных моделей, основываясь на измерениях
входов и выходов рассматриваемого объекта.
Ю. В. Тюменцев 162
Оптимальное управление
Slide 325
'
&
$
%
Схемы адаптивного управления, перспективные с
точки зрения задач управления полетом ЛА —
общая характеристика (XIV)
Нейросетевая реализация алгоритмов адаптивного
управления – 2
Существующий в настоящее время арсенал нейросетевых средств позволяет
решать задачи идентификации и управления как в ходе проектирования систем
управления (с сохранением затем неизменными полученных алгоритмов
управления), так и непосредственно в процессе функционирования системы
управления, подстраивая алгоритм управления под меняющуюся ситуацию, в том
числе и при возникновении нештатных ситуаций (отказы оборудования,
повреждения конструкции и т. п.).
Другими словами, имеется возможность создания не только неадаптивных
нейросетевых систем управления, но и их адаптивных вариантов.
Slide 326
'
&
$
%
Схемы адаптивного управления, перспективные с
точки зрения задач управления полетом ЛА —
общая характеристика (XV)
Нейросетевая реализация алгоритмов адаптивного
управления – 3
Применение динамических схем обучения сетей рассматриваемого класса дает
реальную возможность создавать адаптивные системы управления, позволяющие
обеспечить эффективную эксплуатацию сложных систем в условиях
разнообразных неопределенностей.
Существует значительное число схем адаптивного управления, в том числе и в
нейросетевом исполнении.
К числу наиболее популярных из них можно отнести адаптивное управление с
эталонной моделью, а также адаптивное управление с прогнозирующей м оделью.
Далее рассматривается использование этих схем для решения задачи управления
продольным движением маневренного самолета.
Ю. В. Тюменцев 163
Оптимальное управление
Slide 327
'
&
$
%
Адаптивное управление с эталонной моделью (I)
Общая схема адаптивного управления с ЭМ – 1
В задаче управления с эталонной моделью (MRAC — Model Reference Adaptive
Control) регулятор реализуется в нейросетевом виде (нейроконтроллер).
Обучение его осуществляется таким образом, чтобы выход системы под его
управлением максимально точно соответствовал выходу эталонной модели.
Для реализации процесса обучения нейроконтроллера требуется нейросетевая
модель объекта.
В нейросетевой реализации схемы адаптивного управления с эталонной моделью
используются два нейросетевых модуля: управляющая сеть (нейроконтроллер) и
модель объекта управления (НС-модель).
Вначале решается задача идентификации для рассматриваемого об ъекта
управления, з атем полученная НС-модель используется для обучения
нейроконтроллера, который должен обеспечить ма ксимально точное
отслеживание выхода эталонной модели.
Slide 328
'
&
$
%
Адаптивное управление с эталонной моделью (II)
Общая схема адаптивного управления с ЭМ – 2
Нейроконтроллер представляет собой двухслойную сеть, на входы которой через
линии задержки (TDL-элементы) подается задающий входной сигнал r(t) и
выход объекта управления y
p
(t), а также, в ряде случаев, и выход
нейроконтроллера u(t).
НС-модель объекта управления в качестве входов получает, также через линии
задержки, управляющий сигнал от нейроконтроллера, а также выход объекта
управления.
Ю. В. Тюменцев 164
Оптимальное управление
Slide 329
'
&
$
%
Адаптивное управление с эталонной моделью (III)
Общая схема адаптивного управления с ЭМ – 3
Эталонная
модель
Компенсатор
Объект
управления
Нейро-
контроллер
НС-модель
объекта
r
+
+
+
+
u
доп
u
e
u
y
эм
y
p
y
p
b
y
ε
ε
m
−
−
y
p
ε
m
Схема нейросетевого адаптивного управления с эталонной моделью
Здесь: u — управление на выходе нейроконтроллера, u
доп
— добавочное
управление от компенсатора, u — результирующее управление, y
p
— выход
объекта управления, y — выход нейросетевой модели объекта у правления; y
эм
—
выход эталонной модели; ε — расхождение между выходами объекта управления
и эталонной модели; ε
m
— расхождение между выходами объекта управления и
НС-модели; r — задающее воздействие.
Slide 330
'
&
$
%
Адаптивное управление с эталонной модель ю (IV)
Общая схема адаптивного управления с ЭМ – 4
IW
1,1
LW
1,2
LW
1,4
LW
3,2
LW
3,4
LW
4,3
LW
2,1
T
D
L
T
D
L
T
D
L
T
D
L
T
D
L
f
1
b
1
1
b
2
1
f
2
f
4
b
3
1
b
4
1
f
3
НС-модель
объекта
управления
Нейро-
контроллер
r(t)
n
1
(t)
n
2
(t)
n
3
(t)
n
4
(t)
a
2
(t)
a
3
(t)
a
4
(t)
b
y(t)
y
p
(t)
ε
m
(t)
ε(t)
Объект
управления
Эталонная
модель
Компенсатор
Σ
Σ
Σ
Σ
Σ
Σ
Σ
y
m
(t)
−
+
−
u
∗
(t)
u
доп
(t)
u(t)
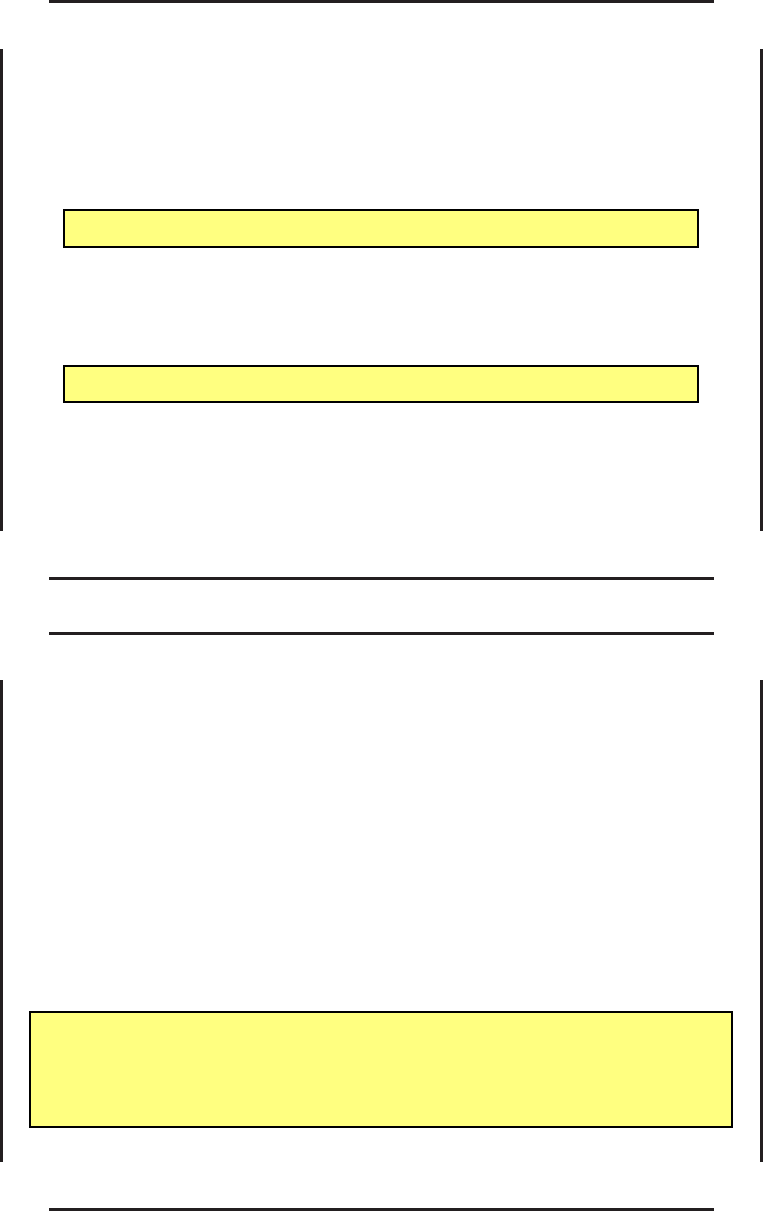
Структурная схема н ейросетевой реа л изации адаптивного управления с эталонной моделью:
TDL — линия задержки; IW — веса связей между входным и первым обрабатывающим слоем
НС; LW — ве са связей между обрабатывающими слоями НС; b — смещения слоя НС; f —
активационные функции слоя НС; Σ — сумматоры слоя НС; n(t) — скалярные выходы
сумматоров; a(t) — скалярные выходы активационных функций; r(t) — за дающий сигнал;
y
p
(t) — выход объекта управления; y(t) — выход НС-модели; y
m
(t) — выход эталонной
модели; u
∗
(t) — управление, вырабатываемое ней роконтроллером; u
доп
(t) — добавочное
управление от компенсатора; u(t) — управление, поступающее на вход объекта;
ε(t) = y
p
(t) − y
m
(t) — расхождение между выходами объекта и эталонной модели.
Ю. В. Тюменцев 165
Оптимальное управление
Slide 331
'
&
$
%
Адаптивное управление с эталонной модель ю (V)
Нейроконтроллер для адаптивного управления с ЭМ – 1
Уравнение нейроконтроллера (НК) имеет вид (статический контроллер):
u
k
= f(r
k
, r
k−1
, . . . , r
k−d
, y
k
, y
k−1
, . . . , y
k−d
),
где y — выход объекта управления, r — задающий сигнал.
По аналогии со схемой у правления с эталонной моделью для линейных систем
уравнение нейроконтроллера должно выглядеть несколько иначе:
u
k
= f(r
k
, u
k−1
, . . . , u
k−d
, y
k
, y
k−1
, . . . , y
k−d
),
Моделирование показывает, что работают эти варианты примерно одинаково, но
первый обучается несколько быстрее. Поэтому в качестве основного был принят
статический вариант нейроконтроллера.
Slide 332
'
&
$
%
Адаптивное управление с эталонной модель ю (VI)
Нейроконтроллер для адаптивного управления с ЭМ – 2
Использование схемы адаптивного у правления с ЭМ требует, очевидно,
определить тем или иным способом соответствующую эталонную модель,
отражающую представления разработчика системы о том, что такое «хорошее»
поведение данной системы, к которому нейроконтроллер должен стремиться
приблизить поведение объекта управления.
Эталонная модель может быть определена различными способами.
В рассматриваемых примерах ЭМ строится на основе колебательного звена с
достаточно высоким демпфированием в сочетании с апериодическим звеном:
¨α
эм
= ϕ
эм
,
˙α
эм
= ˙α
эм
,
˙ϕ
эм
= ω
act
(−ϕ
эм
− 2 ω
эм
ζ
rm
˙α
эм
+ ω
2
эм
(α
ref
− α
эм
)).
(170)
В данной модели принято ω
act
= 40, ω
эм
= 3, ζ
эм
= 0.8.
Ю. В. Тюменцев 166
Оптимальное управление
Slide 333
'
&
$
%
Адаптивное управление с эталонной модель ю (VII)
Нейроконтроллер для адаптивного управления с ЭМ – 3
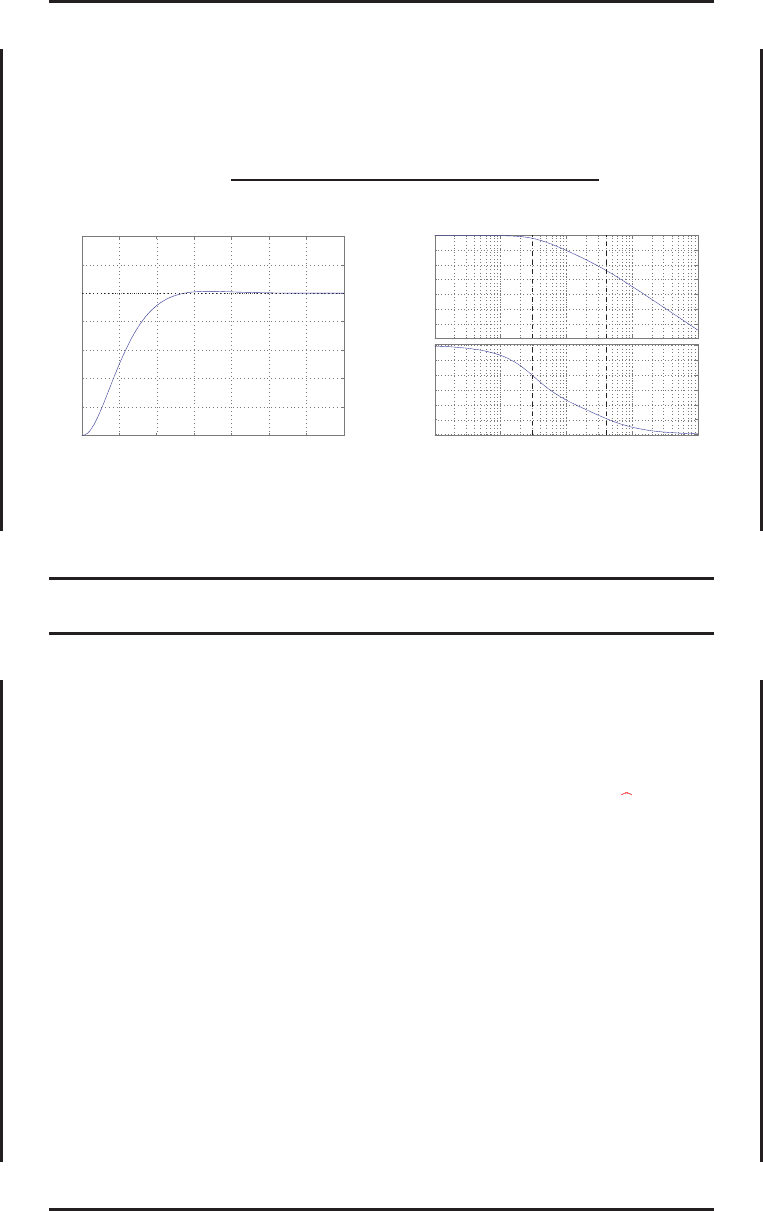
Линейная эталонная модель:
W
α
=
ω
2
эм
((1/ω
2
пр
)p + 1)(p
2
+ 2ω
эм
ζ
эм
p + ω
2
эм
)
0 0.5 1 1.5 2 2.5 3 3.5
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Âðåìÿ,ñ
Àìïëèòóäà
(a)
-140
-120
-100
-80
-60
-40
-20
0
Àìïëèòóäà,äÁ
10
-1
10
0
10
1
10
2
10
3
-270
-225
-180
-135
-90
-45
0
Ôàçà,ãðàä
×àñòîòà,ðàä/ñ
(b)
В данной модели принято ω
эм
= 3, ζ
эм
= 0.8, ω = 40.
Slide 334
'
&
$
%
Адаптивное управление с эталонной модель ю (VIII)
Нейроконтроллер для адаптивного управления с ЭМ – 4
Цель настройки нейроконтроллера — минимизация ошибки y
эм
− y, т.е.
приближение поведения контроллера с моделью объекта к поведению эталонной
модели.
При хорошей НС-модели это означает и минимизацию до определенного уровня
«настоящей» ошибки y
эм
− y (нейроконтроллер с реальным объектом).
Несмотря на то, что нейроконтроллер является статическим, он работает в
составе динамической системы, поэтому настраивать его нужно как
объединенную рекуррентную сеть.
Эта настраиваемая сеть состоит из двух подсетей (самого нейроконтроллера и
замкнутой модели объекта), з амкнутых внешней обратной связью.
В процессе настройки параметры подсети модели не меняются, т.е. НС-модель
служит только для замыкания внешней обратной связи и представления всей
системы в нейросетевом виде (чтобы оценить чувствительность выходов объекта
управления к параметрам нейроконтроллера).
Ю. В. Тюменцев 167
Оптимальное управление
Slide 335
'
&
$
%
Адаптивное управление с эталонной моделью (IX)
Нейроконтроллер дл я адаптивного управления с ЭМ – 5
При обучении нейроконтроллера приходится учитывать следующие фа кторы:
1) На маленьких сегментах (меньше 500–1000 точек) учиться нельзя,
поскольку из-за маленького диапазона входных данных сеть обучается
только этому конкретному сегменту, забывая про все остальные.
2) На больших сегментах всегда попадается плохой локальный минимум.
3) На средних по длине сегментах происходит то же самое, но с помощью
ротации сегментов эту проблему можно до некоторой степени обойти.
По указанным причинам приходится использовать сегменты средней длины , на
каждом делать по 3–7 эпох, проходить по всему кругу несколько раз, а затем
укрупнять сегменты, чтобы улучшить качество обучения.
В итоге процесс обучения НК становится весьма трудоемким (до нескольких
часов, в зависимости от рассматриваемого варианта).
Следует отметить, что нейроконтроллер учится управлять не сами м объектом , а
его моделью, тогда процесс обучения получается устойчивым.
Поэтому, если плоха Н С-модель, то и качество управления тоже будет плохим.
Slide 336
'
&
$
%
Адаптивное управление с эталонной моделью (X)
Нейроконтроллер для адаптивного управления с ЭМ – 6
0 5 10 15 20 25 30 35 40 45 50
−5
0
5
10
15
NN model
Neurocontroller with plant and NN model (training version)
0 5 10 15 20 25 30 35 40 45 50
−5
0
5
10
15
Plant
Object
RefModel
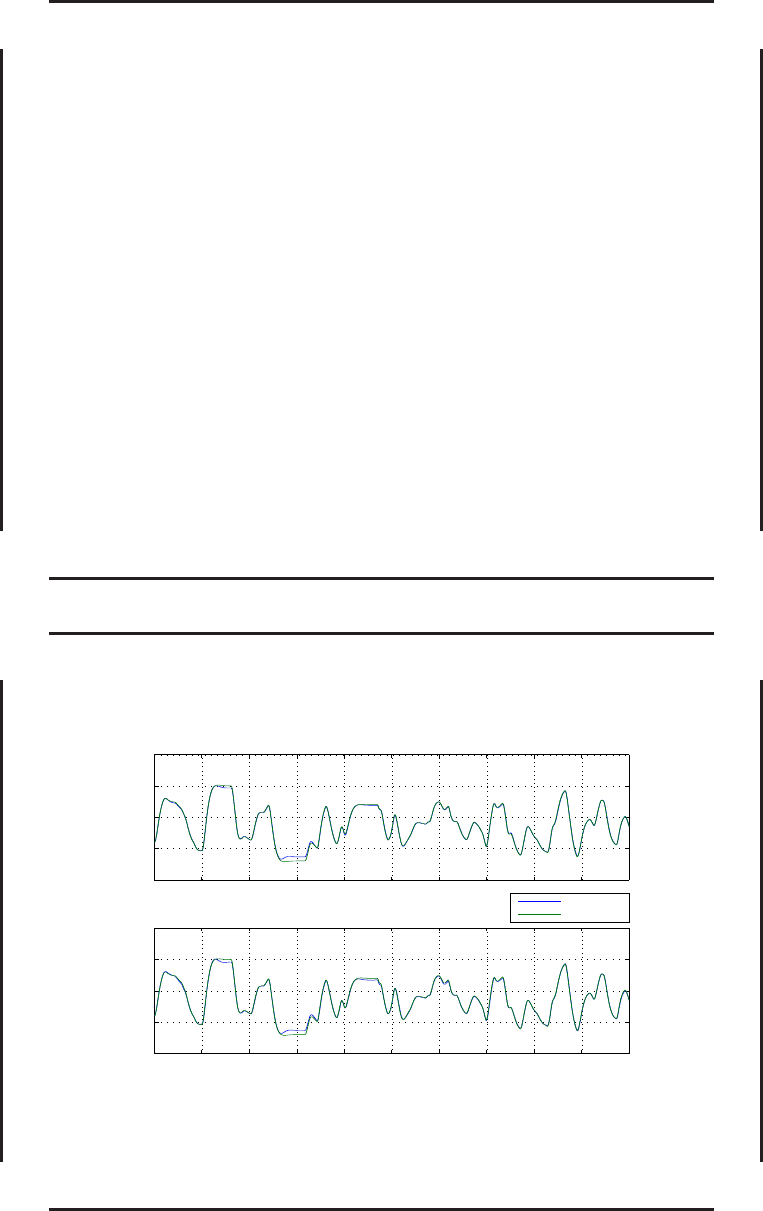
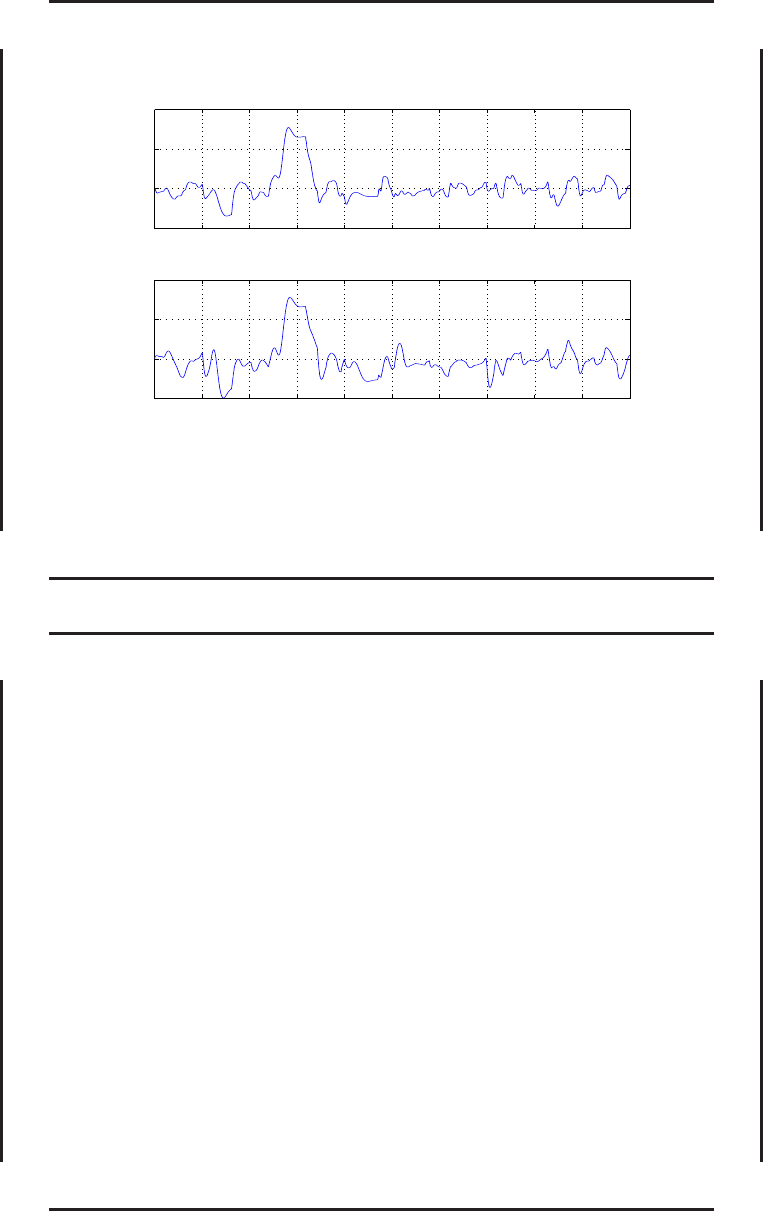
Характеристики работы нейроконтроллера при использовании е го с реальным объектом
управления и с НС-моделью (ГЗЛА X-43, режим полета M = 6)
(a) сравнение характеристик
Обозначения: Plant, Object — объект управления, NNModel — НС-модель.
Ю. В. Тюменцев 168
Оптимальное управление
Slide 337
'
&
$
%
Адаптивное управление с эталонной моделью (XI)
Нейроконтроллер для адаптивного управления с ЭМ – 7
0 5 10 15 20 25 30 35 40 45 50
−0.5
0
0.5
1
NN model
Comparison of errors with plant and NN model
0 5 10 15 20 25 30 35 40 45 50
−0.5
0
0.5
1
Plant
e
α
=α−α
rm
Характеристики работы нейроконтроллера при использовании его с реальным
объектом управления и с НС-моделью (ГЗЛА X-43, режим полета M = 6)
(b) величины ошибок отслеживания задающего сигнала
Обозначения: Plant, Object — объект управления, NNModel — НС-модель,
e
α
= α − α
rm
— ошибка отслеживания к ак разность между значениями угла
атаки для объекта у правления и эталонной модели.
Slide 338
'
&
$
%
Адаптивное управление с эталонной моделью (XII)
Нейроконтроллер для адаптивного управления с ЭМ – 8
Модель не может быт ь абсолютно точной, так как нейросетевой подход в своей
основе дает приближенные решения.
Следовательно, с помощью такого «чистого» подхода невозможно добиться
точного управления (точного следования ЭМ).
Этот результат показан на предыдущем слайде.
Для сравнения там же показана работа нейроконтроллера с тем объектом,
которому он обучался (НС-модель).
Видно, что точность работы НК с реальным об ъектом несколько снижается, что
свидетельствует о наличии уклонения поведения реального объекта от поведения
его НС-модели.
Способ повышения точности работы НК в данной сит уации будет рассмотрен
далее.
Ю. В. Тюменцев 169
Оптимальное управление
Slide 339
'
&
$
%
Адаптивное управление с эталонной модель ю (XIII)
Компенсирующий контур в адаптивном управлении с ЭМ – 1
Ошибки и неточность нейросетевой модели можно рассматривать как
возмущения, приводящие к отклонению траектории реального объекта от
эталонной траектории.
Для уменьшения ошибки следования можно воспользоваться компенсатором
(управление непосредственно по ошибке) — ему все равно какова природа
возмущений и он очень хорошо встраива ется в схему с эталонной моделью.
В простейшем случае компенсатор (ПД-компенсатор) реализует через
дополнительную обратную связь за кон управления вида:
ϕ
доп
= K
p
e + K
d
˙e,
где e = y
эм
− y — ошибка следования ЭМ.
В системе управления компенсатор дискретизирован, ˙e вычисляется как конечная
разность.
Slide 340
'
&
$
%
Адаптивное управление с эталонной модель ю (XIV)
Компенсирующий контур в адаптивном управлении с ЭМ – 2
Несмотря на простоту, компенсирующий контур снижает ошибку следования
примерно на порядок.
Можно использовать интегральный компенсатор, тогда не будет установившейся
ошибки и будут полностью подавляться постоянные возмущения, хотя в
неустановившемся режиме он работает точно так же, как и ПД-компенсатор.
Сопоставить эффект от применения ПД-компенсатора можно по данным,
приведенным на следующих двух слайдах.
Ю. В. Тюменцев 170