Тюменцев Ю.В. Оптимальное управление. Лекции-Слайды
Подождите немного. Документ загружается.

Оптимальное управление
Slide 341
'
&
$
%
Адаптивное управление с эталонной модель ю (XV)
Компенсирующий контур в адаптивном управлении с ЭМ – 3
0 5 10 15 20 25 30 35 40 45
0
5
10
α, deg
MRAC with compensator
0 5 10 15 20 25 30 35 40 45 50
−0.2
0
0.2
e
α
, deg
0 5 10 15 20 25 30 35 40 45 50
−5
0
5
10
α
ref
, deg
0 5 10 15 20 25 30 35 40 45 50
−10
0
10
φ
act
, deg
t, sec
Plant
RefModel
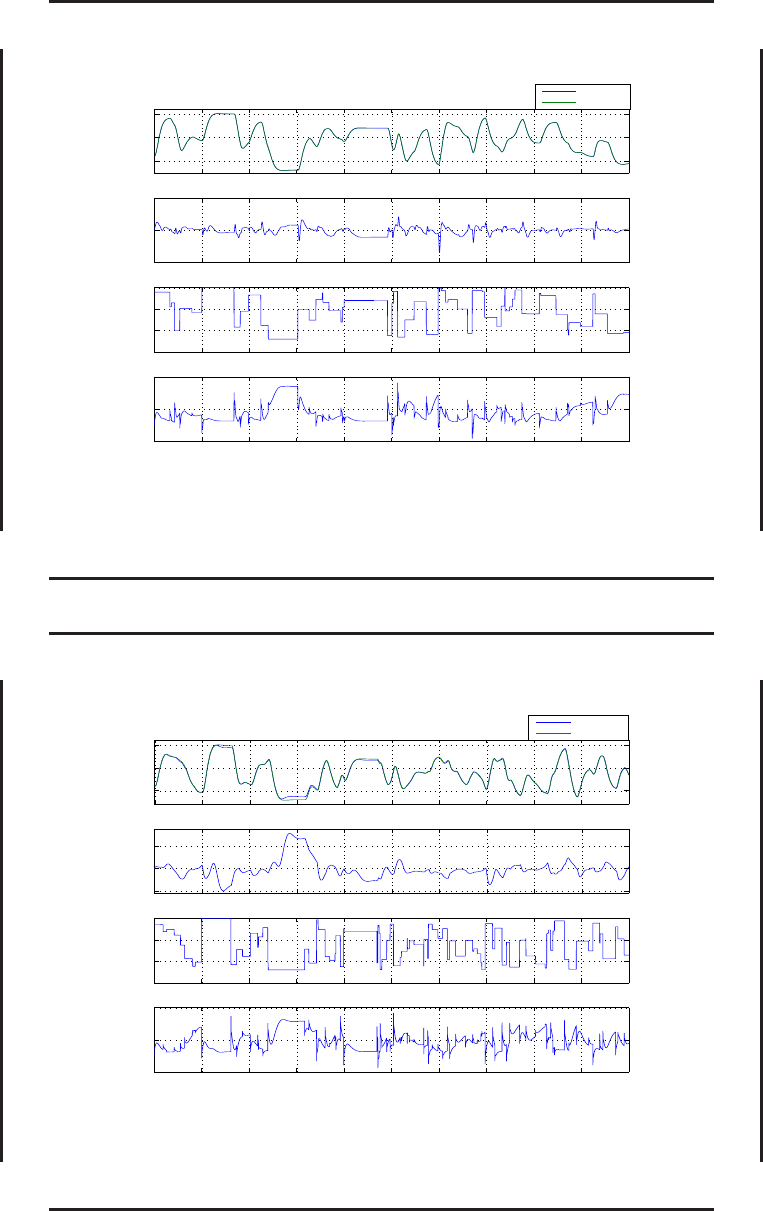
Результаты вычислительного эксперимента для системы управления с эталонной моделью и
компенсатором (ГЗЛА X-43, режим полета M = 6). Обозначения: α — угол атаки, гр ад;
e
α
— ошибка отслеживания заданного угла атаки, гр ад; α
ref
— задающий сигна л по углу
атаки, град; φ
act
— командный сигнал для привода элевонов, град.; t — вре мя, с; Plant —
объект управления; RefModel — эталонная модель.
Slide 342
'
&
$
%
Адаптивное управление с эталонной модель ю (XVI)
Компенсирующий контур в адаптивном управлении с ЭМ – 4
0 5 10 15 20 25 30 35 40 45
0
5
10
α, deg
MRAC without compensator
0 5 10 15 20 25 30 35 40 45
−0.5
0
0.5
e
α
, deg
0 5 10 15 20 25 30 35 40 45 50
−5
0
5
10
α
ref
, deg
0 5 10 15 20 25 30 35 40 45 50
−10
0
10
φ
act
, deg
t, sec
Plant
RefModel
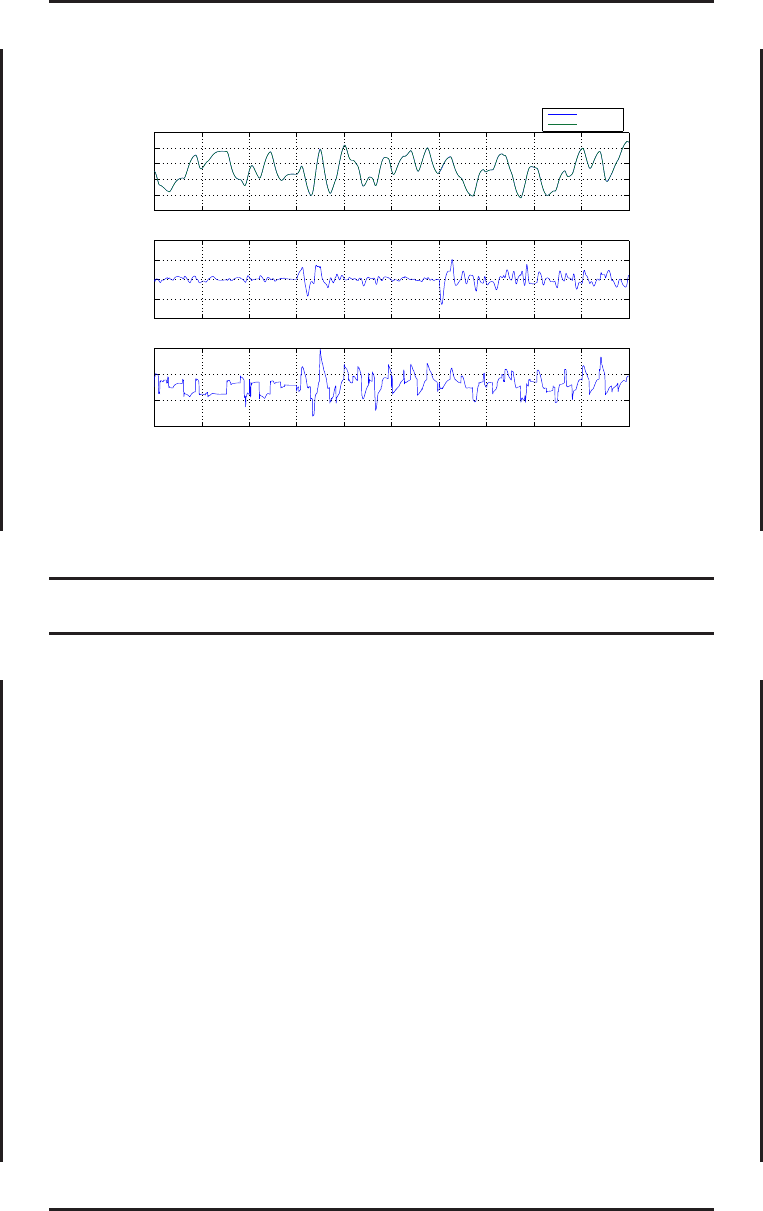
Результаты вычислительного эксперимента для системы управления с эталонной моделью и
без компенсатора (ГЗЛА X-43, режим полета M = 6). Обозначения: α — угол атаки, град;
e
α
— ошибка отслеживания заданного угла атаки, гр ад; α
ref
— задающий сигна л по углу
атаки, град; φ
act
— командный сигнал для привода элевонов, град.; t — вре мя, с; Plant —
объект управления; RefModel — эталонная модель.
Ю. В. Тюменцев 171
Оптимальное управление
Slide 343
'
&
$
%
Адаптивное управление с ЭМ (XVII)
Вычислительный эксперимент – 1
2 4 6 8 10 12
−5
0
5
10
α, deg
0 2 4 6 8 10 12
−0.1
0
0.1
e
α
, deg
0 2 4 6 8 10 12
−5
0
5
10
α
ref
, deg
0 2 4 6 8 10 12
−10
0
10
φ
act
, deg
t, sec
Plant
RefModel
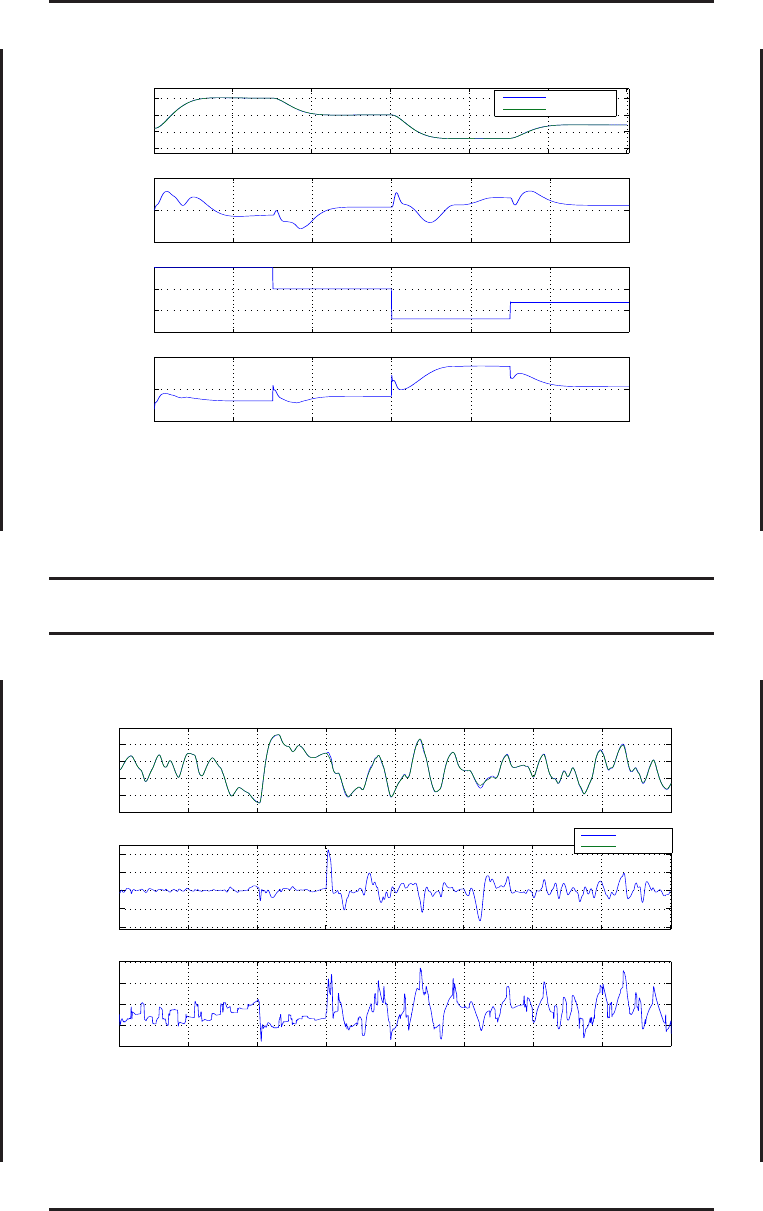
Результаты вычислительного эксперимента для системы управления с эталонной моделью и
компенсатором при ступенчатом изменении задающего сигнала (ГЗЛА X -43, режим полета
M = 6). Обозначения: α — угол атаки, град.; e
α
— ошибка отслеживания заданного угла
атаки, град.; α
ref
— задающий сигна л по углу атаки, град.; φ
act
— командный сигнал для
привода элевонов, град.; t — время, с; Plant — объе кт управления; RefModel — эталонная
модель.
Slide 344
'
&
$
%
Адаптивное управление с ЭМ (XVIII)
Вычислительный эксперимент – 2
0 10 20 30 40 50 60 70 80
−20
−10
0
10
20
30
α, deg
dXt=+0.1 at t=30s, Mzfi−50% at t=50s, online training
10 20 30 40 50 60 70 80
−2
−1
0
1
2
∆α, deg
0 10 20 30 40 50 60 70 80
−20
−10
0
10
20
φ, deg
t, sec
Object
RefModel
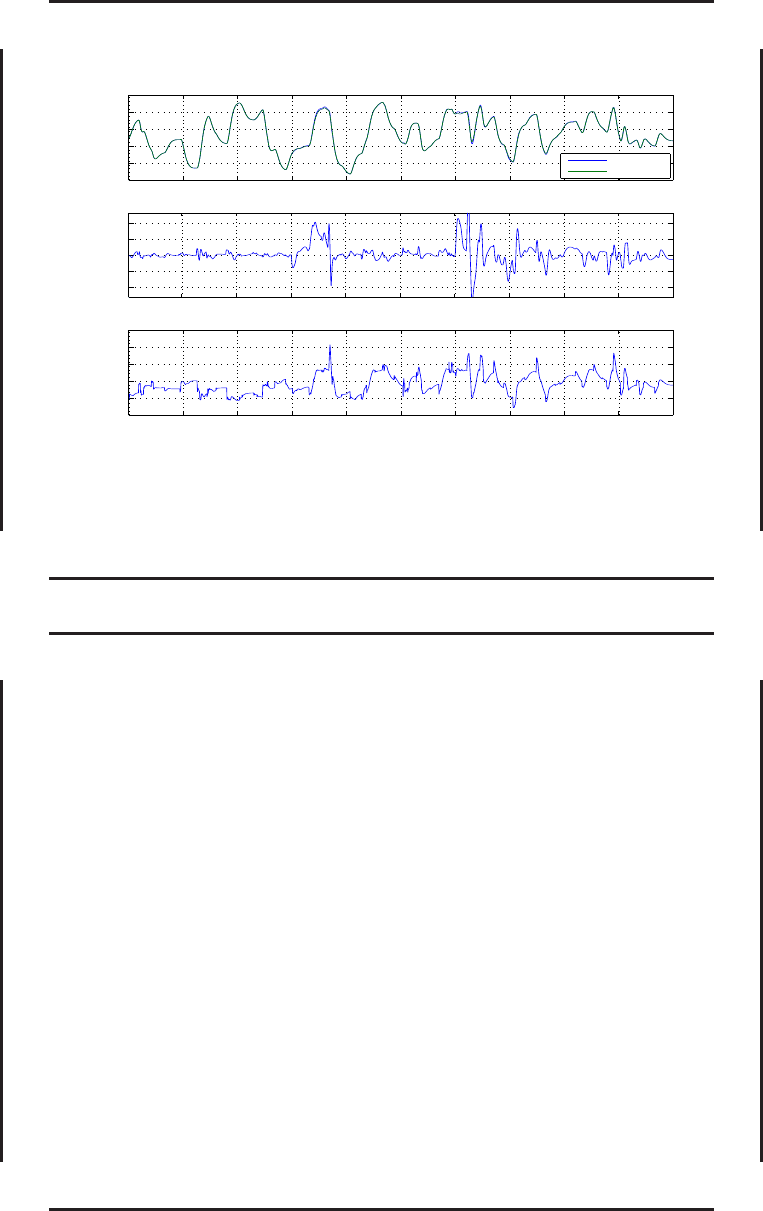
Результаты вычислительного эксперимента для системы управления с эталонной моделью и
компенсатором (самолет F-16, режим полета с и ндикаторной скоростью V
ind
= 600 к м/ч).
Адаптация к изменению динамики объекта управления: сме щ ение центровки на 10% назад
(t = 30 с), 50% уменьшение эффективности органа управления (t = 50 с). Обозначения: α
— угол атаки, град.; ∆α — ошибка отслеживания заданного угла атаки, град.; φ — угол
отклонения стабилизатора, град.; t — время, с; Plant — объект управления; RefModel —
эталонная модель.
Ю. В. Тюменцев 172
Оптимальное управление
Slide 345
'
&
$
%
Адаптивное управление с ЭМ (XIX)
Вычислительный эксперимент – 3
0 10 20 30 40 50 60 70 80 90 100
−20
−10
0
10
20
30
α, deg
dXt=+0.1 at t=30s, dMzFi−50% at t=60s, online training
10 20 30 40 50 60 70 80 90 100
−1
−0.5
0
0.5
1
∆α, deg
0 10 20 30 40 50 60 70 80 90 100
−20
−10
0
10
20
30
φ, deg
t, sec
Object
RefModel
Результаты вычислительного эксперимента для системы управления с эталонной моделью и
компенсатором (самолет F-16, режим полета с и ндикаторной скоростью V
ind
= 700 к м/ч).
Адаптация к изменению динамики объекта управления: сме щ ение центровки на 10% назад
(t = 30 с), 50% уменьшение эффективности органа управления (t = 60 с). Обозначения: α
— угол атаки, град.; ∆α — ошибка отслеживания заданного угла атаки, град.; φ — угол
отклонения стабилизатора, град.; t — время, с; Plant — объект управления; RefModel —
эталонная модель.
Slide 346
'
&
$
%
Адаптивное управление с ЭМ (XX)
Вычислительный эксперимент – 4
Было показано, как адаптивная система управления с ЭМ и компенсатором
справляется с влиянием двух последовательных отказов, существенно
влияющих на динамику объекта.
Первый из них приводит к смещению центровки на 10% назад (при t = 20 с),
второй — к уменьшению на 50% эффективности органа управления продольным
движением (при t = 50 с).
Видно, что использованная схема адаптации обеспечивает работу с
незначительной ошибкой (e
α
≈ ±0.05 град) до м омента возникновения первой
отказной ситуации.
Адаптация к изменению динам и ки объекта, вызванному этой ситуацией,
происходит достаточно быстро (примерно за 1.2–1.5 с).
Ошибка теперь (до момента возникновения второй отказной ситуации) стала
больше, но она укладывается, в основном, в диапазон e
α
≈ ±0.2 град,
устойчивость работы системы сохранена.
После второго отказа устойчивость сохранена, н о значения ошибки становятся
довольно значительными (e
α
≈ ±0.5 град).
Ю. В. Тюменцев 173
Оптимальное управление
Slide 347
'
&
$
%
Адаптивное управление с ЭМ (XXI)
Вычислительный эксперимент – 5
Задающий сигнал по углу атаки, отслеживание которого должна обеспечить
рассматриваемая система управления, строился по тем же правилам, что и
командный сигнал привода органа управления при формировании обучающего
набора для НС-модели.
А именно, формировалась случайная последовательность ступенчато
изменяемых отслеживаемых значений угла атаки, при частых и существенных
перепадах между соседними значениями элементов данной последовательности.
Такой подход призван обеспечить возможно большее разнообразие состояний
моделируемой системы (чтобы покрыть по-возможности равномерно и плотно все
пространство состояний системы), а также возможно большее разнообразие
перепадов состояний, соседних по времени (чтобы максимально достоверно
отразить в алгоритме управления, реализуемом НК, динамику объекта).
Slide 348
'
&
$
%
Адаптивное управление с ЭМ (XXII)
Вычислительный эксперимент – 6
Итак, можно заключить: представленные результаты вычислительных
экспериментов убедительно показывают, что в подавляющем большинстве случаев
адаптивная нейросетевая система управления с ЭМ успешно справляется со
своими задачами.
В том числе она вполне удовлетворительно работает и при возникновении
отказных ситуаций.
Ю. В. Тюменцев 174
Оптимальное управление
Slide 349
'
&
$
%
Адаптивное управление с ПМ (I)
Общая схема адаптивного управления с ПМ – 1
В за даче управления с прогнозирующей моделью (MPC — Model Predictive Control)
используется модель объекта, с помощью которой прогнозируется его будущее поведение,
а также оптимизационный алгоритм для выбора управляющего воздействия, обеспечивающего
наилучшие значения прогнозируемых характер истик рассматриваемой системы.
Управление с прогнозирующей моделью основывается на методе скользящего горизонта,
согласно которому НС-модель предсказывает выход объекта управления через заданный
промежуток времени (горизонт прогноза).
Полученные результаты прогноза используются алгоритмом численной оптимизации для того,
чтобы найти значени е управления u, которое минимизирует на заданном горизонте
прогноза следующий критерий качества управления:
J =
N
2
j=N
1
(y
r
(t + j) − y
m
(t + j))
2
+ ρ
N
u
j=1
(u
′
(t + j − 1) − u
′
(t + j − 2))
2
.
Здесь N
1
, N
2
и N
u
— числовые параметры, определяющие горизонт прогноза, в пределах
которого оцениваются значения ошибки слежения и приращений управляющего сигнала.
Величины (y
r
и y
m
— желаемый выход объек та управления и в ы ход НС-модели,
соответственно, u
′
— пробные управляющие воздействия, ρ — весовой коэффициент,
задающий относительную долю вклада отклонений по управлениям в общее значение
критерия эффективности J.
Slide 350
'
&
$
%
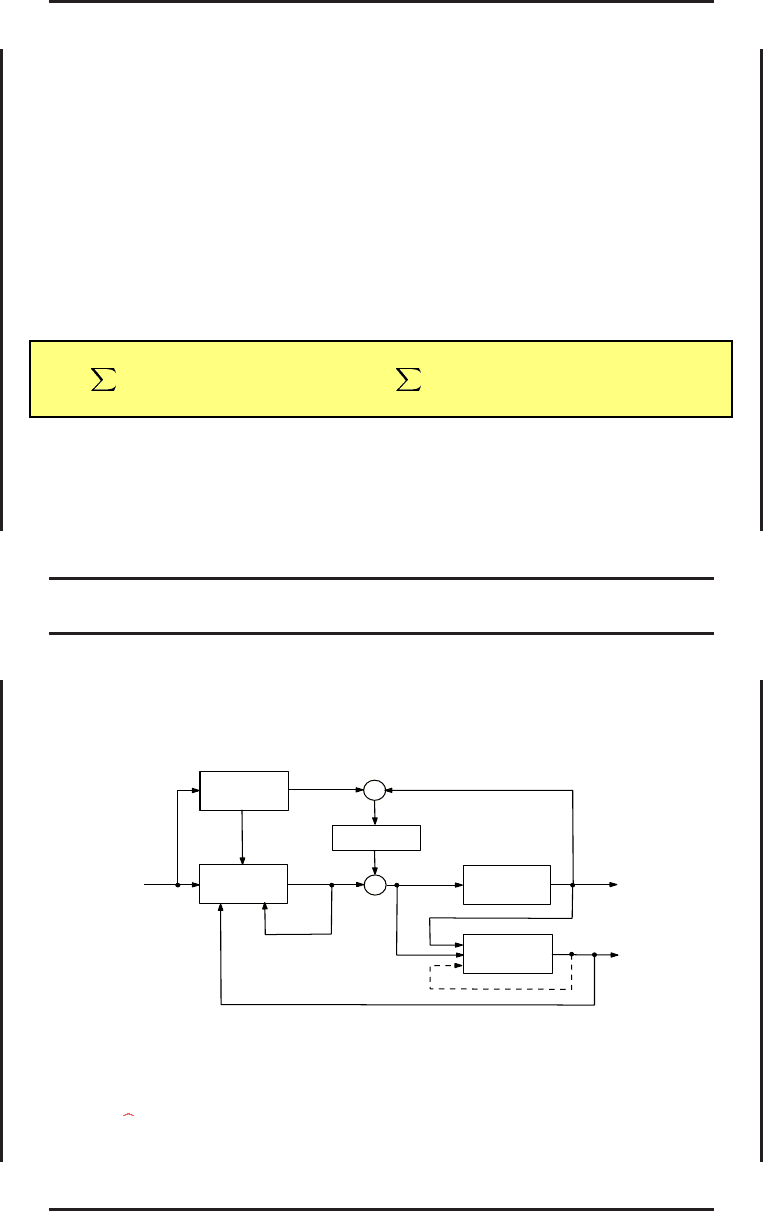
Адаптивное управление с ПМ (II)
Общая схема адаптивного управл ения с ПМ – 2
Объект
управления
+
Алгоритм
оптимизации
Компенсатор
Эталонная
модель
+
+
−
uu
∗
u
доп
u
u
u
∗
y
эм
y
p
y
p
b
y
b
y
b
y
ε
y
p
r
y
эм
НС-модель
объекта
Схема нейросетевого адаптивного прогнозирующего управ л ения
Здесь обозначено: u
∗
— управление на выходе алгоритма оптимиз ации, u
доп
— добавочное
управление от компенсатора, u — результирующее управление, y
p
— выход объе к та
управления, y — выход нейросетевой модели объек та управления; y
эм
— выход эталонной
модели; ε — расхождение между выходами объекта управления и эталонной модели; r —
задающее воздействие
Ю. В. Тюменцев 175
Оптимальное управление
Slide 351
'
&
$
%
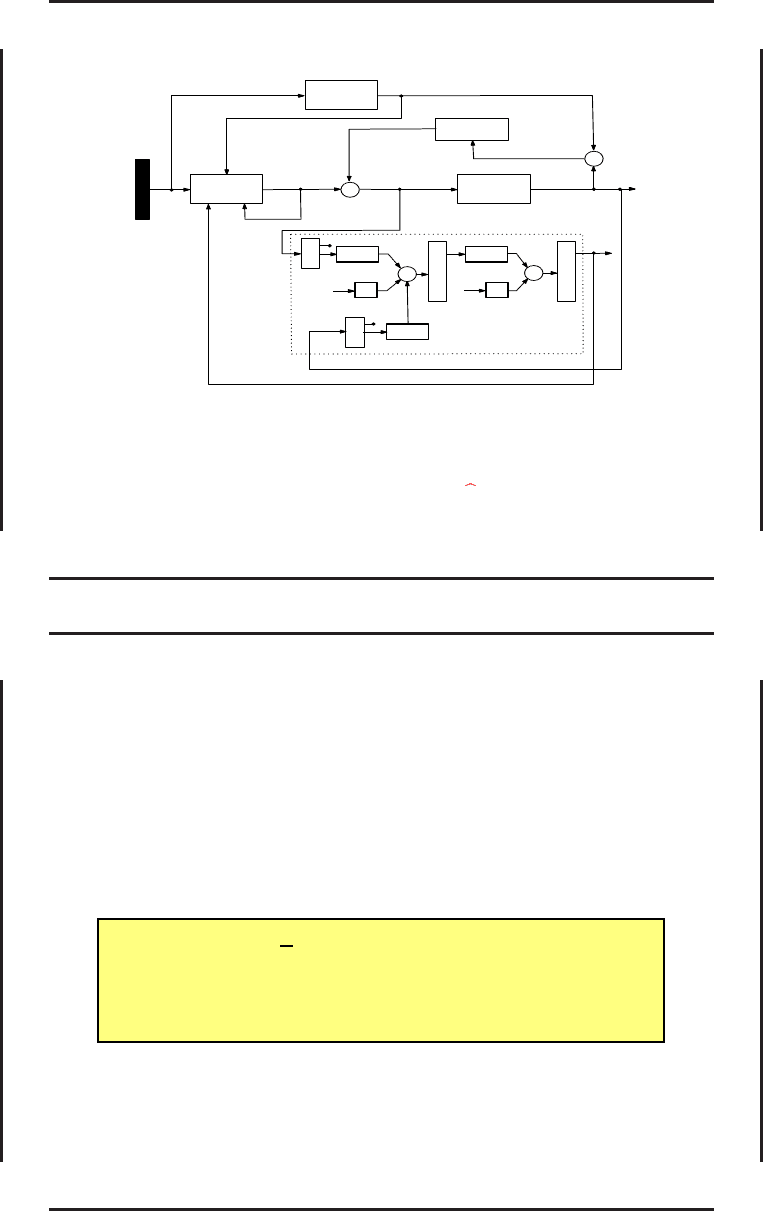
Адаптивное управление с ПМ (III)
Общая схема адаптивного управления с ПМ – 3
LW
3,2
LW
3,4
LW
4,3
T
D
L
T
D
L
f
4
b
3
1
b
4
1
f
3
НС-модель
объекта
управления
r(t)
n
3
(t)
n
4
(t)
a
3
(t)
y
p
(t)
ε(t)
Объект
управления
Σ
Σ
Σ
Σ
y
m
(t)
−
+
u
доп
(t)
b
y(t)
Алгоритм
оптимизации
Эталонная
модель
Компенсатор
+
u
∗
(t)
u
∗
(t)
u(t)
y
p
(t)
b
y(t)
r(t)
y
m
(t)
+
Структурная схема нейросетевой реализации адаптивного управлен ия с П М: TDL — линия
задержки; IW — матрица весов связей между входным и первым обрабатывающим слоем НС;
LW — матрица весов связей между обрабатывающими слоями НС; b — набор смещений слоя
НС; f — набор активационных функций слоя НС; Σ — набор сумматоров слоя НС; n(t) —
набор скалярных выходов сумматоров; a(t) — набор скалярных выходов активационных
функций; r(t) — задающий сигнал; y
p
(t) — выход ОУ; y(t) — выход НС-модели; y
m
(t)
— выход ЭМ; u
∗
(t) — управление, вырабатываемое алгоритмом оптимизации; u
доп
(t) —
добавочное управление от компенсатора; u(t) — упра вление, поступающее на вход ОУ;
ε(t) = y
p
(t) − y
m
(t) — расхождение между выходами ОУ и ЭМ.
Slide 352
'
&
$
%
Адаптивное управление с ПМ (IV)
Синтез контроллера для адаптивного управления с ПМ – 1
В схеме с ПМ используется только одна многослойная нейронная сеть,
представляющая собой НС-модель объекта.
Контроллер здесь представлен алгоритмом оптимизации.
Критерием качества для данной системы является среднеквадратическая ошибка
на интервале прогноза (5–7 шагов):
E(u) =
1
2
e
T
e, e(u) = y − ˆy(u),
e = [e
k+2
, e
k+3
, . . . , e
k+T
]
T
,
u = [u
k+1
, u
k+2
, . . . , u
k+T −1
]
T
,
где T — длина интервала прогноза.
Таким образом, в схеме с ПМ выполняется минимизация отклонения поведения
НС-модели от ЭМ не по параметрам нейроконтроллера (и х тут нет вообще), а
непосредственно по управлению на интервале прогноза.
Ю. В. Тюменцев 176

Оптимальное управление
Slide 353
'
&
$
%
Адаптивное управление с ПМ (V)
Синтез контроллера для адаптивного управления с ПМ – 2
Контроллер в схеме управления с ПМ реализует оптимизационны й алгоритм
Гаусса-Ньютона
u
n+1
= u
n
+ (J
T
u
J
u
+ λE)
−1
J
T
u
e,
где E — единичная матрица, J(w
n
) — якобиан ошибки по парам етрам, µ —
параметр подстройки.
Метод Гаусса-Ньютона очень похож на метод Левенберга-Марквардта,
отличается только тем, что коэффициент µ в нем не меняется динамически, он
выбирается экспериментально для решаемой задачи.
Slide 354
'
&
$
%
Адаптивное управление с ПМ (VI)
Синтез контроллера для адаптивного управления с ПМ – 3
Основная сложность — необходимо вычислить динамический якобиан по
управлению:
J
u
=
∂e
k+2
∂u
k+1
∂e
k+2
∂u
k+2
. . .
∂e
k+2
∂u
k+T −1
∂e
k+3
∂u
k+1
∂e
k+3
∂u
k+2
. . .
∂e
k+3
∂u
k+T −1
· · · · · · · · · · · ·
∂e
k+T
∂u
k+1
∂e
k+T
∂u
k+2
. . .
∂e
k+T
∂u
k+T −1
Для этого используется метод обратного распространения ошибки во вре мени
(BPTT — Back Propagation Through Time) для замкнутой нейросетевой модели.
Ю. В. Тюменцев 177
Оптимальное управление
Slide 355
'
&
$
%
Адаптивное управление с ПМ (VII)
Синтез контроллера для ад аптивного управления с ПМ – 4
С учетом сказанного, вычисление управления на каждом шаге интегрирования производится
в следующей последовательности:
1) Построение желаемого поведения на интервале прогноза. ЭМ просчитывается на этом
интервале при постоянном задающем сигнале (за дающий сигнал
r
k+1
. . . r
k+T −1
= r
k
: самый простой вариант — последнее доступное значение
этого сигнала).
2) Прогноз проведения объекта управления по его НС-модели на несколько шагов
вперед. На чальными условиями для модели являются эталонная траектория и
предыдущие значения управления, полученные с помощью такого контроллера.
3) Определение вектора ошибки следования, вы числен ие якобиана ошибки для каждого
момента времени по упра влению в каждый момент времени.
4) Корректировка вектора управления любым оптимизационным методом (в данном
случае методом Гаусса-Ньютона). Пункты 2–4 представляют собой одну итерацию
оптимизационной процедуры, выполняемой до разумного уме ньшения ошибки прогноза.
5) В качестве управления (в реальный объект) на следующем шаге (процедура
оптимизации занимает часть шага) берется первое упра вление на интервале прогноза
(т.е. u
k+1
). Этим же значением заполняется весь вектор н ачального приближения
управления на следующем шаге.
Slide 356
'
&
$
%
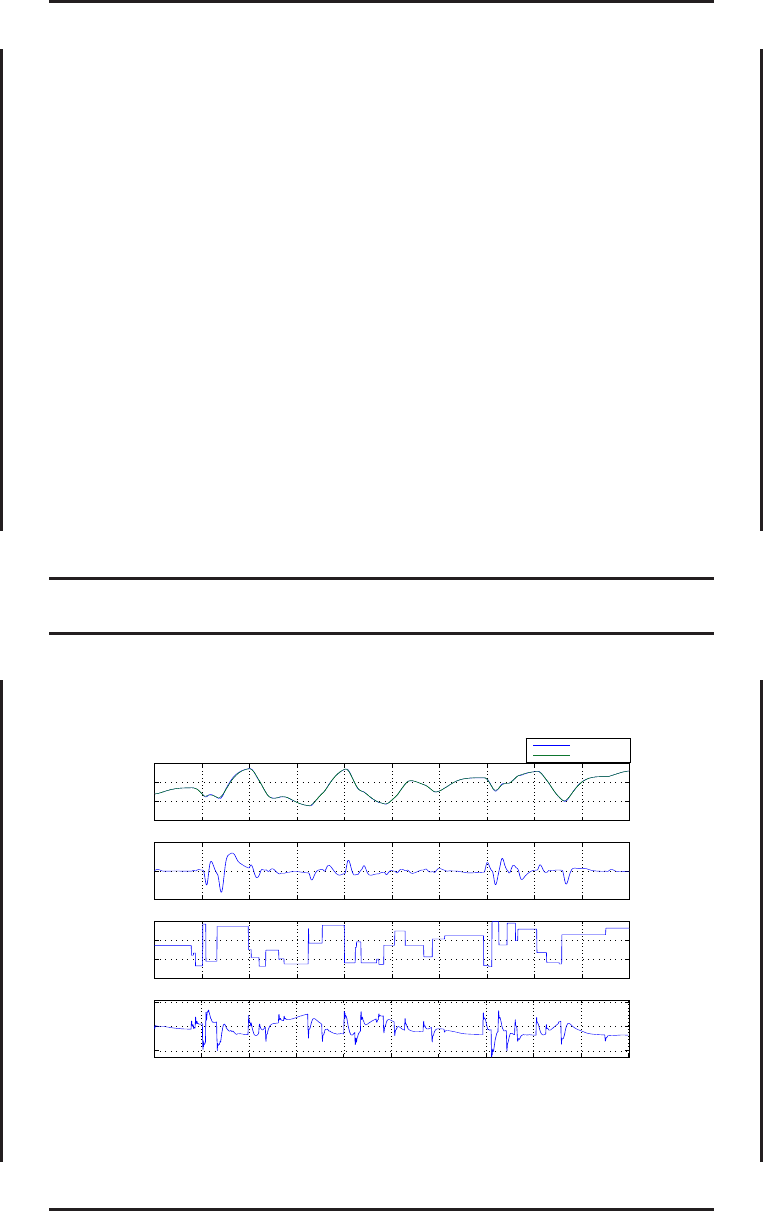
Адаптивное управление с ПМ (VIII)
Вычислительный эксперимент для управления с ПМ – 1
0 2 4 6 8 10 12 14 16 18 20
−5
0
5
10
α, deg
MPC without failures
0 2 4 6 8 10 12 14 16 18 20
−0.5
0
0.5
e
α
, deg
0 2 4 6 8 10 12 14 16 18 20
−5
0
5
10
α
ref
, deg
2 4 6 8 10 12 14 16 18 20
−10
0
10
φ
act
, deg
t, sec
Plant
RefModel
Результаты вычислительного эксперимента для системы управления с прогнозирующей
моделью и компенсатором, без отказов (ГЗЛА X-43, режим полета с числом Маха
M = 6). Обозначения: α — угол атаки, град.; e
α
— ошибка отслеживания заданного угла
атаки, град.; α
ref
— задающий сигна л по углу атаки, град.; φ
act
— командный сигнал для
привода элевонов, град.; t — время, с; Plant — объе кт управления; RefModel — эталонная
модель.
Ю. В. Тюменцев 178
Оптимальное управление
Slide 357
'
&
$
%
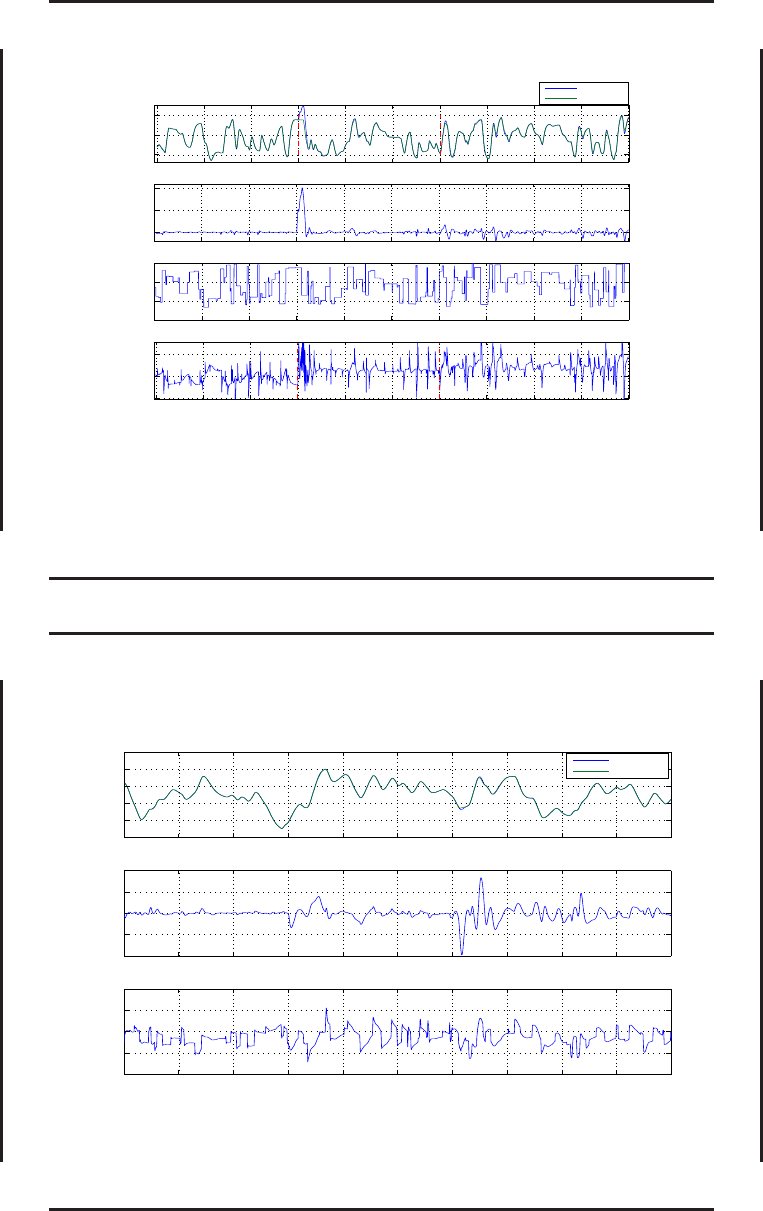
Адаптивное управление с ПМ (IX)
Вычислительный эксперимент для управления с ПМ – 2
0 10 20 30 40 50 60 70 80 90 100
0
5
10
α, deg
failures: dXt=+5% (t=30s), dmzfi=−30% (t=60s)
10 20 30 40 50 60 70 80 90 100
0
2
4
e
α
, deg
0 10 20 30 40 50 60 70 80 90 100
−5
0
5
10
α
ref
, deg
0 10 20 30 40 50 60 70 80 90 100
−10
0
10
φ
act
, deg
t, sec
Plant
RefModel
Результаты вычислительного эксперимента для системы управления с прогнозирующей
моделью и компенсатором (ГЗЛА X-43, режим полета с числом Маха M = 6). Адаптация
к изменению динамики объекта управления вследствие отказов: смещение центровки н а
5% назад ( t = 30 с), 30% уменьшение эффективности органа управления (t = 60 с).
Обозначения: α — угол атаки, град.; e
α
— ошибка отслеживания заданного угла атаки,
град.; α
ref
— задающий сигна л по углу атаки, град.; φ
act
— командный сигнал для
привода элевонов, град.; t — время, с; Plant — объе кт управления; RefModel — эталонная
модель.
Slide 358
'
&
$
%
Адаптивное управление с ПМ (X)
Вычислительный эксперимент для управления с ПМ – 3
0 10 20 30 40 50 60 70 80 90 100
−20
−10
0
10
20
30
α, deg
dXt=+0.05 at t=30s, dMzfi−50% at t=60s, online ident training
0 10 20 30 40 50 60 70 80 90 100
−1
−0.5
0
0.5
1
∆α, deg
0 10 20 30 40 50 60 70 80 90 100
−20
−10
0
10
20
φ, deg
t, sec
Object
RefModel
Результаты вычислительного эксперимента для системы управления с прогнозирующей
моделью и компенсатором (самолет F-16, режим полета с индикаторной скоростью
V
ind
= 300 к м/ч). Обозначения: α — угол атаки, град.; e
α
— ошибка отслеживания
заданного угла атаки, град.; α
ref
— задающий сигна л по углу атаки, град.; φ
act
—
командный сигнал для привода элевонов, град.; t — время, с; Plant — объе к т управления;
RefModel — э талонная модель.
Ю. В. Тюменцев 179
Оптимальное управление
Slide 359
'
&
$
%
Адаптивное управление с ПМ (XI)
Вычислительный эксперимент для управления с ПМ – 4
0 10 20 30 40 50 60 70 80 90 100
−20
−10
0
10
20
30
α, deg
dXt=+0.05 at t=30s, dMzfi−50% at t=60s, online ident training
0 10 20 30 40 50 60 70 80 90 100
−1
−0.5
0
0.5
1
∆α, deg
0 10 20 30 40 50 60 70 80 90 100
−20
−10
0
10
φ, deg
t, sec
Object
RefModel
Результаты вычислительного эксперимента для системы управления с прогнозирующей
моделью и компенсатором (самолет F-16, режим полета с индикаторной скоростью
V
ind
= 500 к м/ч). Обозначения: α — угол атаки, град.; e
α
— ошибка отслеживания
заданного угла атаки, град.; α
ref
— задающий сигна л по углу атаки, град.; φ
act
—
командный сигнал для привода элевонов, град.; t — время, с; Plant — объе к т управления;
RefModel — э талонная модель.
Slide 360
'
&
$
%
Адаптивное управление с ПМ (XII)
Вычислительный эксперимент для управления с ПМ – 5
Поведение ЛА под управлением системы с прогнозирующей моделью в
значительной степени подобно его поведению под управлением системы с
эталонной моделью.
Выводы, которые следуют из результатов вычислительных экспериментов для
схемы с ПМ, в целом аналогичны тем, что были сделаны для систем с эталонной
моделью.
А именно, в подавляющем большинстве случаев адаптивная нейросетевая
система у правления с ПМ успешно справляется со своими задача ми, в том числе
и при возникновении отк азных ситуаций.
Сопоставление схем адаптивного управления с эталонной моделью и с
прогнозирующей моделью не позволяет отдать предпочтение ни одной из них.
У каждой из них есть свои полож ительные и отрицательные свойства.
Окончательное решение в пользу какой-либо одной из этих схем можно сделать
лишь применительно к конкретной решаемой прикладной задач е, после
проведения достаточно обширной серии вычислительных экспериментов.
Ю. В. Тюменцев 180