Ляпидов В.C. Теоретические основы кибернетики. Методы оптимизации
Подождите немного. Документ загружается.


ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра “Автоматика и управление в технических системах”.
ПОСОБИЕ К САМОСТОЯТЕЛЬНОЙ РАБОТЕ
СТУДЕНТОВ ПО КУРСУ «ТЕОРЕТИЧЕСКИЕ ОСНОВЫ
КИБЕРНЕТИКИ». МЕТОДЫ ОПТИМИЗАЦИИ.
Учебно-методическое пособие
Самара
Самарский государственный технический университет
2009
Печатается по решению Редакционно-издательского совета СамГТУ
УДК 681.3
Пособие к самостоятельной работе студентов по курсу «Теоретические
основы кибернетики». Методы оптимизации.
учебно-метод. пособие / Сост.: В. С. Ляпидов. – Самара; Самар. гос. техн.
ун-т. 2009. – 116 с.: ил.
Приводятся основные положения теории оптимального управления:
управление по критерию максимального быстродействия; методика решения
задач с использованием классического вариационного исчисления и принципа
максимума.
УДК 681.3
Составитель: канд. техн. наук В.С. Ляпидов
Рецензент: канд. техн. наук В.Ф. Яковлев
© В.С. Ляпидов, составление, 2009
© Самарский государственный
технический университет, 2009
2
Оглавление
1. Введение. Основные понятия и определения.......................................................5
1.1. Задача нахождения алгоритмов управления......................................................8
Раздел 2. Некоторые критерии оптимальности........................................................9
2.1. Задача о максимальном быстродействии.........................................................10
2.2. Задача синтеза систем по интегральным критериям качества переходных
процессов....................................................................................................................10
2.3. Задача ограничения энергетических ресурсов................................................11
3. Математические основы теории оптимальных систем......................................13
3.1. Функционалы, вариации и их свойства............................................................13
3.2. Понятие линейности функционала...................................................................14
3.3. Уравнение Эйлера. Уравнение Эйлера-Пуассона. Условия
трансверсальности.....................................................................................................14
3.4. Задачи на условный экстремум.........................................................................20
3.5. Принцип максимума...........................................................................................21
3.6. Динамическое программирование....................................................................32
3.7. Способы нахождения фазовых траекторий.....................................................36
4. Управление, оптимальное по быстродействию, в разомкнутых системах......44
4.1. Нахождение оптимальных управлений с помощью принципа максимума.
Теорема об “n” интервалах.......................................................................................44
4.2. Физическая сущность управления, оптимального по быстродействию.......56
4.3. Определение моментов переключения в линейных оптимальных
управлениях...............................................................................................................69
4.4. Определение моментов переключения при дополнительных ограничениях,
накладываемых на координаты................................................................................80
4.5. Нахождение моментов переключения в нелинейных оптимальных
управлениях...............................................................................................................93
4.6. Определение знака первого интервала...........................................................100
5. Управление, близкое к оптимальному..............................................................103
5.1. Уменьшение количества интервалов управления.........................................104
3
Перечень заданий для самостоятельной работы..................................................113
Список литературы..................................................................................................115
4
1. Введение. Основные понятия и определения.
Несмотря на огромные успехи, касающиеся автоматизации
промышленности, выдвигаются всё новые требования к
автоматизации. Так, сейчас мало того, что объект управления (домна
или мартен) управляются с общего пульта, автоматически
поддерживаются заданные параметры технологического процесса, а
требуется, чтобы технологический процесс проходил, например, за
минимальное время, с наименьшей затратой топлива, энергии и.т.д.
Это принципиально новая постановка задачи и её разрешение стоит
на пути управления сложным процессом, например, плавки металла.
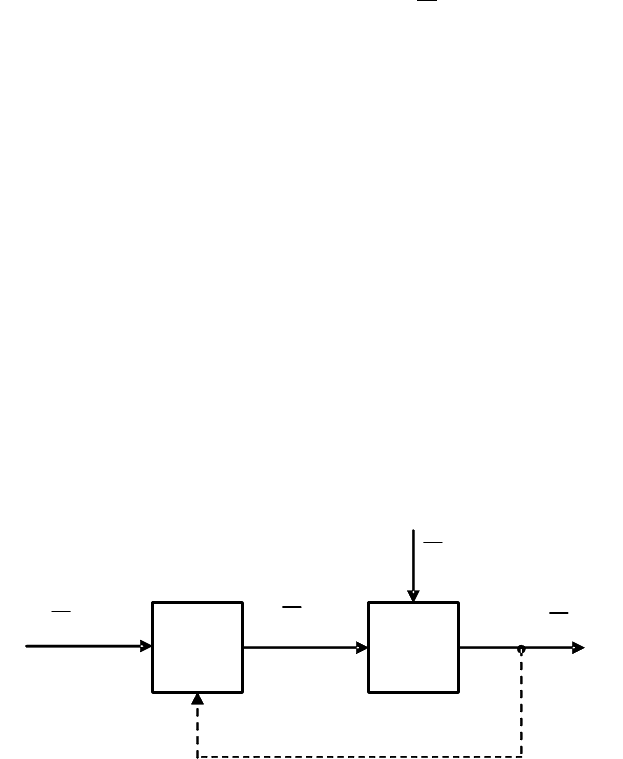
Рассмотрим общую структурную схему системы управления,
состоящую из двух звеньев 1 и 2. (рис.1)
1
2
y
x
z
u
Рис. 1.
Понятия, вложенные в звенья 1 и 2, непрерывно претерпевают
эволюцию. Так до конца 19-го столетия в основном рассматривалось
звено 1 (регулятор) и очень мало уделялось внимание звену 2
(объекту управления). Однако количество знаний о звеньях 1 и 2
непрерывно увеличивалось, и в конце 19-го века произошёл
качественный скачок, тогда признали необходимость рассмотрения
звеньев только совместно.
Это дало толчок к дальнейшему исследованию взаимодействия
звеньев 1и 2. Основной упор на протяжении пяти, шести десятилетий
20 века делался на разработку вопросов устойчивости совместной
5
работы звеньев 1и 2. Здесь были достигнуты огромные успехи,
которые выразились в виде разработки стройной теории
регулирования. Однако, задачи, выполняемые звеньями, оставались
достаточно узкими. В основном схема (рис 1) предназначалась для
стабилизации различных параметров объекта управления.
К концу 20 века количество знаний о звеньях 1 и 2 настолько
расширилось, что значительно изменились понятия, вкладываемые в
звенья. Звено 1 теперь называется управляющим устройством, под
звеном 2-объектом управления - понимаются уже не только машины
и механизмы, но, допустим, экономические, биологические формации
или целые производственные процессы.
Теперь звено 1 не только стабилизирует параметры звена 2, а
управляет ими для наилучшей его работы.
Эволюцию претерпела и структура звена 1: от простейшего
регулятора Ползунова – Уатта до современных вычислительных
машин.
Итак, звено 2 называется объектом управления (ОУ). Звено 1
называется управляющим устройством (УУ). Оно должно, прежде
всего, обеспечивать цель управления.
Рассмотрим величины, которые определяют работу (ОУ) и (УУ).
ОУ характеризуется вектором состояния
)x,...,x,(xх
n21
,
координаты которого могут иметь самую различную природу и
сущность: для гидрогенератора - напряжение, мощность и частота;
для двигателя - момент на валу и частота вращения; для предприятия
– отдельные показатели плана. На координаты вектора
х
всегда
накладываются ограничения типа
x
1
X
1
, x
2
X
2
, … , x
n
X
n
.
Так, например, мощности машин, аппаратов, предприятий,
страны на некотором отрезке времени всегда ограничены. Нарушение
этих ограничений обычно приводит к ненормальным и опасным
режимам.
6
К ОУ приложены воздействия: управляющие, которые могут
быть охарактеризованы вектором
)uu
m
,...,,(uu
21
, и возмущающие,
представляемые вектором
),...,,(
21 k
zzzz
.
Управляющие воздействия – это воздействия, которые
сознательно меняются для достижения цели управления. На
составляющие вектора
u
накладываются ограничения типа:
u
1
U
1
, u
2
U
2
, … , u
m
U
m
.
Если взять синхронный генератор, напряжение возбуждения, с
помощью которого управляют напряжением на статоре, не может
превосходить паспортных данных.
Управляющее устройство (УУ) характеризуется способностью
вырабатывать вектор
u
. Изменение вектора
u
во времени или в
пространстве координат
m
uuu ,...,,
21
называется алгоритмом
управления.
Таким образом, УУ выдаёт на ОУ алгоритм в виде изменения
вектора
u
. В свою очередь УУ получает внешние команды
y
,
служащие для запуска и перестройки УУ.
На ОУ могут также действовать возмущающие воздействия
(вектор
z
), которые искажают алгоритм управления
u
, мешают
достижению цели управления, поэтому возмущающие воздействия
часто называют помехами.
Некоторые составляющие вектора
z
могут быть полезными, т.е.
такими, для преодоления которых, и предназначен объект, например,
преодоление полезного момента двигателя.
Возмущающие воздействия в большинстве случаев не
подвластны оператору, и зачастую можно говорить о характере их
изменения только в статистическом смысле.
Если детально изучить составляющие вектора
z
, то, очевидно,
найдутся ограничения типа
z
1
Z
1
, z
2
Z
2
, … , z
k
Z
k
.
Векторы
zux ,,
связаны между собой некоторой
закономерностью. Будем рассматривать только такие объекты, в
7
которых связь между векторами может быть записана в виде системы
обыкновенных дифференциальных уравнений
;,...,,,,...,,,,...,,
i
f
i
212121 kmn
zzzuuuxxx
dt
dx
n,...,2,1
,
или в векторной форме
zux
dt
xd
,,f
где функции
i
f
определены для любых значений
Xx
и любых
значений,
Uu
, причём, области Х и U могут быть открытыми и
замкнутыми. Функции
i
f
непрерывны по совокупности
n
xxx ,...,,
21
.
Вектор
u
может быть функцией непрерывной, кусочно-непрерывной
или кусочно-гладкой.
Управляющее устройство может получать информацию о
векторах
x
и
z
и на основании этого формировать вектор
u
, а может
и не получать никакой информации от объекта управления. В первом
случае имеется замкнутая система управления, во втором -
разомкнутая. В технике нашли применение оба вида систем, но
замкнутые распространены гораздо больше. Разомкнутые системы
работают по жёсткому алгоритму, т.е. являются системами
детерминированными. В замкнутых системах алгоритм может
меняться в зависимости от значений векторов,
x
и
z
. Такие системы
иногда называют информационными.
1.1. Задача нахождения алгоритмов управления.
Охарактеризовав систему автоматического управления (САУ),
следует определить цель, т.е. то, ради чего создаётся САУ.
В самом общем виде цель управления определяется некоторым
функционалом:
tztutx ,,JJ
Требуется найти такой алгоритм
tu
или
zxu ,f
, при котором
функционал принимал бы экстремальное значение, т.е.
8

extremumtztutx ,,JJ
При определении функционала, естественно, должны
учитываться ограничения, накладываемые на
zxu ,,
.
В таком общем виде задача нахождения алгоритмов управления
не решена. Но для некоторых конкретных целей управления пути
нахождения алгоритмов найдены. Поэтому рассмотрим только те
задачи, которые уже решены или могут быть решены на основе
разработанных методов.
Раздел 2. Некоторые критерии оптимальности.
Большое распространение в практике и теории управления
получили интегральные функционалы. Интегральный функционал
J
определяется некоторым набором функций и представляет собой
число, зависящее от выбранных функций.
Как уже отмечалось ранее, цель управления состоит в
нахождения такого вектора
u
, который доставлял экстремум
функционалу (в частности интегральному).
extremumdtzzzuuuxxx
t
t
kmn
1
0
,...,,,,...,,,,...,,fJ
212121i
Каждому управлению
tu
, заданному на отрезке
t
0
t
t
1
и в области управления U, будет соответствовать
определённое численное значение
J
. Значит, из всех возможных
управлений
tu
нужно найти такое, которое доставляло бы
функционалу J экстремальное значение (под экстремальным
значением понимается как max, так и min).Общая задача нахождения
алгоритмов управления, сформулированная ранее, распадается на ряд
частных задач, соответствующих различным целям управления (или
критериям оптимальности).
9
2.1. Задача о максимальном быстродействии.
Если в функционале J положить
1,,f zux
то:
1
0
min011
1J
t
t
Tttdt
(2.1)
Таким образом, оптимальность J
1
означает минимум времени
перехода координат объекта из положения
0
x
в положение
1
x
. На
управление накладывается ограничение; оно может принадлежать
некоторой замкнутой области
Uu
.
Отметим некоторые важные технические применения
оптимального быстродействия. На базе теории были
сконструированы быстродействующие самопишущие приборы,
созданы исполнительные оптимальные механизмы регуляторов
прокатных станов, оптимальные приводы металлорежущих станков,
оптимальные системы управления движущимися объектами и.т.д.
Теория оптимальных по быстродействию систем наиболее проста и
наиболее полно разработана. Результаты этой теории можно
распространить и на другие критерии оптимальности.
2.2. Задача синтеза систем по интегральным критериям качества
переходных процессов.
Если
2
,,f xzux
, то:
0
2
2
minJ dtx
(2.2)
где х – отклонение координаты от установившегося значения.
Данный пример применяется для косвенного анализа переходных
процессов в замкнутых системах регулирования. Физический смысл
этого интеграла состоит в том, что он даёт площадь, ограниченную
кривой квадрата х. Чем меньше площадь, тем быстрее протекает
10