Ляпидов В.C. Теоретические основы кибернетики. Методы оптимизации
Подождите немного. Документ загружается.

уравнений, содержащая моменты переключения, алгебраическая, то
она решается в общем виде относительно моментов переключения.
То же самое можно сказать, если система уравнений содержит только
одно трансцендентное уравнение. Если же имеется два и более
трансцендентных уравнений, то система в общем виде не разрешима
относительно моментов переключения.
При наличии цифровой вычислительной машины определение
моментов переключения с любой точностью не вызывает
затруднений. Однако не всегда в распоряжении инженера может быть
цифровая машина. Кроме этого, в некоторых случаях проще решить
систему несложных уравнений, чем готовить программу вычислений
для ЦВМ и настраиваться на ней.
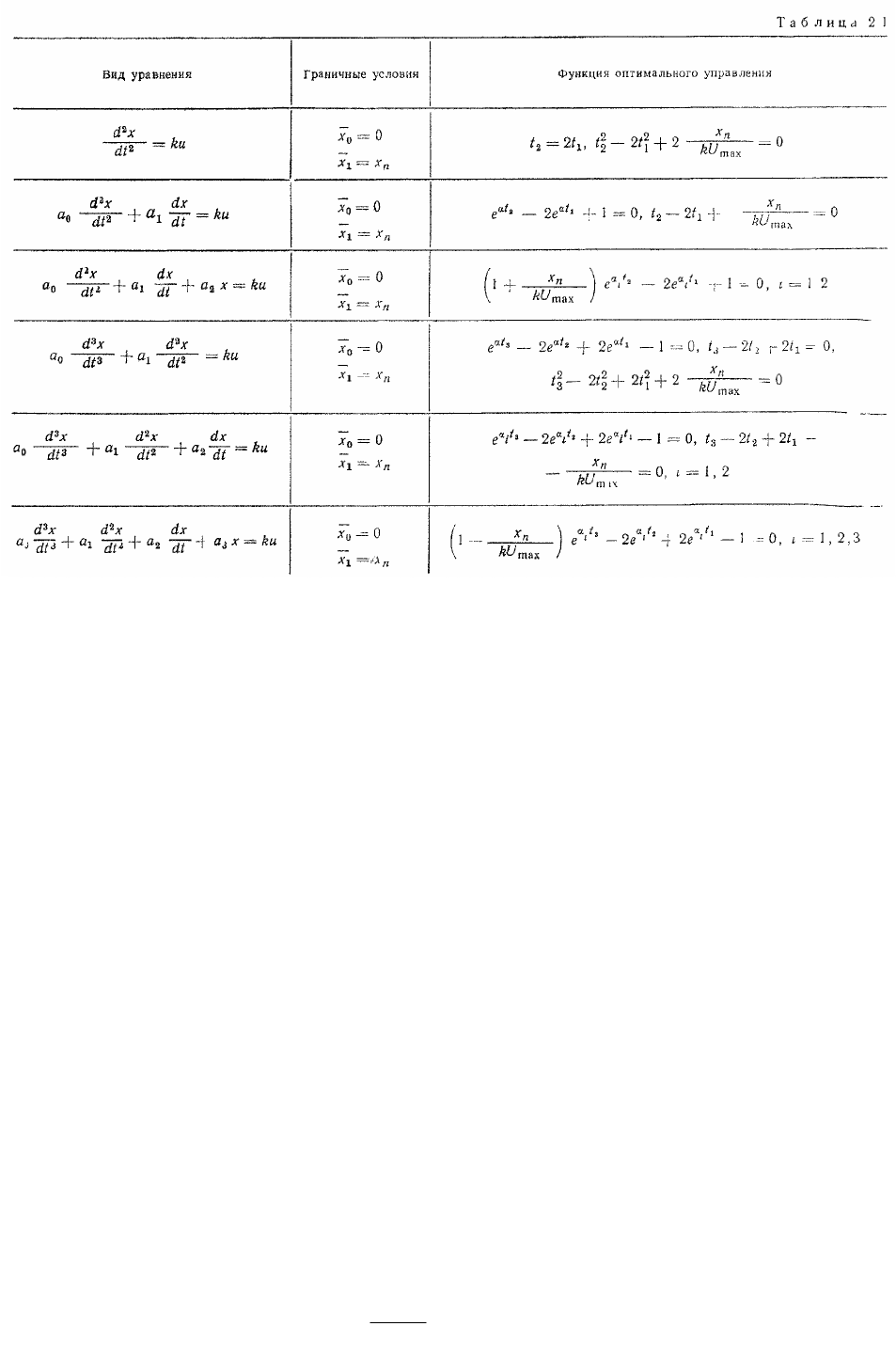
Приведем численный графоаналитический метод определения
моментов переключений, точность которого вполне достаточна для
инженерных приложений. Покажем это на примере системы урав-
нений, которая после подстановки значений корней примет вид
;0121
1112
//
max
TtTt
n
ee
kU
x
71

.0121
2122
//
max
TtTt
n
ee
kU
x
Решим эти уравнения относительно t
1
;
2
11
ln
12
/
max
11
Tt
n
e
kU
x
Tt
.
2
11
ln
22
/
max
21
Tt
n
e
kU
x
Tt
Задаваясь значениями t
2
, из полученных уравнений определяем t
1
и строим кривые t
1
=f
α1
(t
2
), t
1
=f
α2
(t
2
), для различных T
i
(рис.4.8). Точка
пересечения этих кривых даст искомое решение, т. е. t
1
и t
2
.
Данным методом относительно просто получаются решения для
уравнений не выше третьего порядка. Для более высоких порядков
уравнений целесообразно прибегать к цифровым вычислительным
машинам, тем более что методика решений таких уравнений
достаточно разработана.
t
1
1
f
2
f
t
2
Рис.4.8 Решение системы
трансцендентных уравнений,
определяющих функцию
оптимального управления
72

Определим моменты переключения для структурной схемы,
изображенной на рис. 4.2, б. Для нее также пригоден метод
стыкования решений дифференциальных уравнений со
знакопеременной частью. Не делая вывода в общем виде, который
аналогичен предыдущему, покажем определение моментов
переключения для двух звеньев. Звенья описываются следующими
уравнениями:
,
;
22
2
2
11
1
1
ux
dt
dx
T
ux
dt
dx
T
(4.53)
где
.;1
max21
Uu
Требуется перевести объект из положения x
1
=x
2
=0 при t =0 в
положение х
1
= х
1n
, х
2
= х
2n
за минимальное время. Известно, что для
этого нужно два интервала, причем первый примем положительным.
Момент переключения обозначим через t
1
, конец второго интервала
— t
2
.
Записываем решения на момент t
2
.
,
1222
1212
/
2
2max2
/
2
2
2
02
/2
1max1
/2
1
2
01
TtTt
n
TtTt
n
eCUeCCx
eCUeCCx
(4.54)
Отсюда определяем
;
22
/
max11
2
1
Tt
n
eUxC
.
22
/
max22
2
2
Tt
n
eUxC
Стыкуем решения на момент времени t
1
.
;
2121
1111
/
2
2
2
0
/
1
2
1
0
/2
1
2
0
/1
1
1
0
TtTt
TtTt
eCCeCC
eCCeCC
(4.55)
Группируя, имеем
.2
;2
max2
/
1
2
2
2
max1
/1
1
2
1
21
11
UeCC
UeCC
Tt
Tt
(4.56)
Определяем
1
1
C
и
1
2
C
из начальных условий
.
;
max2
1
2
max1
1
1
UC
UC
(4.57)
Подставляем значения постоянных интегрирования из (4.54) и
(4.55) в (4.56)
.2
;2
2122
1112
/
max2
/
max22max2
/
max1
/
max11max1
TtTt
n
TtTt
n
eUeUxU
eUeUxU
(4.58)
Преобразуем (4.58)
73

.0121
;0121
2122
1112
//
max2
2
//
max1
1
TtTt
n
TtTt
n
ee
U
x
ee
U
x
(4.59)
Система уравнений (4.59) аналогична системе (4.48). Решение
(4.59) следует провести приближенно рассмотренным графическим
методом.
Обратимся к структурной схеме, представленной на рис. в.
Найдем моменты переключения для двух звеньев, которые описыва-
ются следующими уравнениями:
,
;
22
2
2
11
1
1
ux
dt
dx
T
ux
dt
dx
T
(4.60)
где
;1
21
;
21
Mxx
.
max
Uu
Начальные условия при t=0 x
1
=x
2
=0. Конечное состояние
находится на линии x
1
+x
2
=M.
Для управления таким объектом требуется один интервал уп-
равления. Определяем его из решений дифференциальных уравнений
и условия попадания на линию М
.
;1
;1
21
max2
/
2
max1
/
1
2
1
Mxx
Uex
Uex
Tt
Tt
(4.61)
Иначе можно записать:
.11
max2
/
max1
/
2111
MUeUe
TtTt
Отсюда графическим методом находится момент переключения t
1
.
4.4. Определение моментов переключения при дополнительных
ограничениях, накладываемых на координаты.
До сих пор ограничения накладывались только на управляющие
воздействия. Такие ограничения приводили к тому, что сумма членов
дифференциального уравнения объекта была ограничена
....
max1
1
1
kUxa
dt
xd
a
dt
xd
n
n
n
n
n
При этом в фазовом пространстве получалась область естествен-
ного изменения координат. Однако сами координаты в процессе
74

управления могли принимать большие значения, которые иногда
были недопустимы по условиям эксплуатации объекта.
Во введении упоминалось, что ограничиваются скорости, ускоре-
ния, токи в электрических машинах, температуры и т.д. Ограничения
координат в системах автоматического управления возможны двух
видов: безусловные и условные.
Безусловные ограничения координат появляются вследствие са-
мого принципа работы объекта. Рассмотрим, например, асинхронный
двигатель. Максимальная скорость вращения его при управлении
напряжением не может превысить синхронную скорость при сколь
угодно большом напряжении. Максимальный момент его также не
может превысить определенной величины вследствие насыщения
магнитной системы при больших напряжениях. Поэтому первая и
вторая производные от угла поворота двигателя будут безусловно
ограниченными координатами.
Условные ограничения на координаты системы вводят сознатель-
но для достижения определенных целей. Так, например, для дви-
гателя постоянного тока необходимо ограничивать максимальный
момент, так как при больших токах якоря ухудшается коммутация,
возникают большие динамические усилия. Поэтому обычно
выбирают
нд
ММ 32
, где М
н
- номинальный момент двигателя. Для
двигателей переменного тока (за исключением мощных двигателей)
ограничения момента по этой причине не требуется. В транспортных
объектах часто требуется условное ограничение момента по причине
ограничения ускорения в процессе разгона и торможения, например
для уменьшения вредных воздействий на
пассажиров.
75
x
2
доп
x
1 3
x
Рис. 4.9 Изменение координат
при ограничении
доп
xx
В результате ограничений в фазовом пространстве получаются
некоторые области. Оптимальная траектория должна лежать внутри и
на границе этой области (рис. 4.9). На фазовой плоскости, образо-
ванной координатами
x
и х, выделена область линией
доп
x
. В
процессе управления скорость объекта не должна превосходить
значения
доп
x
. Из физических соображений следует, что сначала
нужно выйти на допустимую границу по траектории 1, далее
двигаться по этой границе - траектория 2 - и затем по траектории 3
попасть в заданную точку. В принципе максимума рассматривается
движение координат внутри области и на границе ее, а также условие
сопряжении траекторий на границе. Доказывается, что с помощью
максимального управляющего воздействия нужно попасть на границу
области; далее управляющее воздействие должно быть таким, чтобы
координаты изменялись на границе области, а потом снова
максимальным управляющим воздействием переводились с границы
области в заданную точку. Благодаря такому характеру движения
расширяется класс функций управления: они должны быть не только
кусочно-непрерывными, но и кусочно-гладкими.
Рассмотрим управление, оптимальное по быстродействию с огра-
ничением на производные. В общем случае объект описывается диф-
76

ференциальным уравнением n-го порядка для структурной схемы,
представленной на рис. , а,
....
max1
1
1
kUxa
dt
d
a
dt
xd
n
n
n
n
x
(4.62)
На координату х
(k)
наложено ограничение
k
доп
k
xx
и по-прежнему
ограничено управление
max
Ux
.
Общий алгоритм построения оптимальной системы в этом случае
состоит из следующих циклов: 1) управление координатой х
(k)
,
обеспечивающее вывод ограниченной координаты на ее допустимое
значение
k
доп
x
; 2) стабилизация ограниченной координаты на значении
k
доп
k
xx
; 3) управление по переводу ограниченной координаты со
значения
k
доп
k
xx
на значение
k
доп
k
xx
; 4) стабилизация
k
доп
k
xx
и т.
д.
Рассмотрим управление координатой х
(k)
. Управлять координатой
х
(k)
- это значит управлять самой х
(k)
и ее высшими производными
х
(k+1)
, … , х
(n-1)
без учета изменения остальных координат х,
1
,...,
k
xx
.
Если координата х
(k)
выводится на ее допустимое значение и затем
удерживается на этом значении, то конечные условия будут
следующими:
k
доп
k
xx
, х
(k+1)
=…=x
(n)
=0.
Определим алгоритм изменения управляющего сигнала
max
Uu
для
рассматриваемого объекта, имеющего уравнение (4.62). В уравнении
(4.62) произведем замену переменных
zx
k
t
kk
kn
n
kn
zdtazazaz
0
1
1
......
,......
max
0
1
Uzdta
k
t
(4.63)
или
,...
max1
1
tUzazaz
k
kn
n
kn
(4.64)
где
t
k
t
k
zdtazdtat
0 0
1
.......
77

По принципу максимума можно утверждать, что для управления
координатой x
(k)
необходимо (n-k) интервалов управляющего сигнала
U
max
, так как порядок уравнения (4.64) равен n-k . Функция же
t
представляет собой сумму координат x
(k-1)
, ..., х, которые скачком
изменяться не могут.
Из (4.63) ясно, что х, ..., x
(k-1)
плавные функции, медленно из-
меняющиеся по отношению к управляющему сигналу U
max
. Для
получения оптимального быстродействия правая часть (4.64) должна
принимать максимальное значение, когда U
max
имеет релейный закон
изменения.
Если объект управления имеет степень астатизма, равную k, т.е.
max1
)1()(
... Uzazax
r
rn
n
n
то, заменяя переменную
zx
r
, получим
max1
)1()(
... Uzazaz
r
rn
n
rn
(4.65)
Отсюда видно, что для управления координатой необходимо
)( rn
интервалов
max
U
.
Таким образом, все управление координатой х можно разбить на
отдельные циклы, в каждом из которых осуществляется управление
по выводу
r
x
на значение
)()( r
доп
r
xx
при
0...
)1()1(
nr
xx
. Управление
же в каждом цикле происходит в течение
)( rn
интервалов. В
промежутке между этими циклами осуществляется стабилизация
ограниченной координаты на значении
)()( r
доп
r
xx
. На интервалах
времени, где
)()( r
доп
r
xx
,
,0...
)()2()1(
nrr
xxx
остальные координаты
xx
r
,...,
)1(
определяются простым
интегрированием
t
rrr
доп
t
rrr
доп
r
r
t
к
доп
r
xtxtxdtxx
xtxdtxx
xdtxx
0
,00
1)1(
0
)(
0
)2(
0
)1(
0
)()2(
)1(
0
0
)1(
......
;
;
(4.66)
где
)1(
00
,
r
xx
- начальные значения координат на участке
стабилизации.
Определим число участков стабилизации и число циклов управ-
ления координатой
r
x
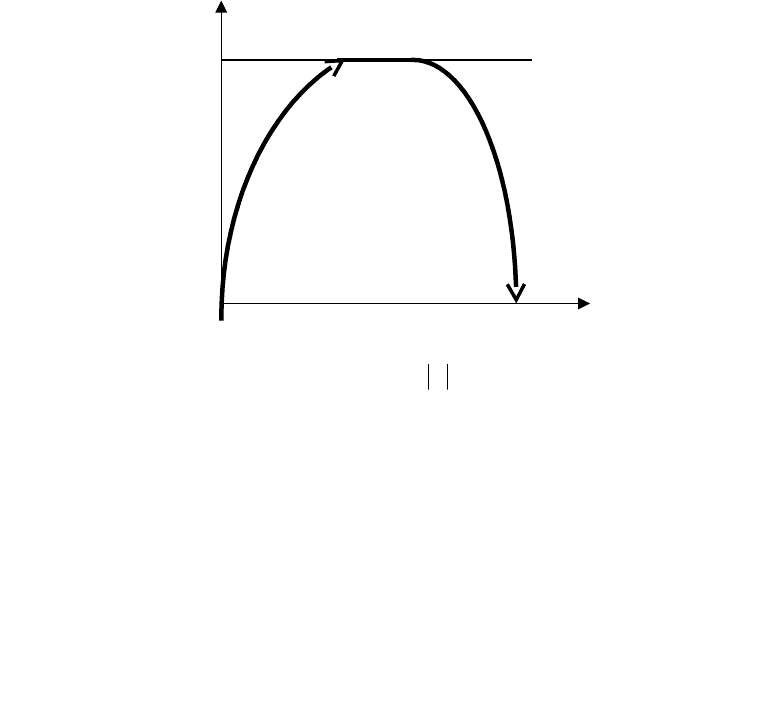
. Рассмотрим систему четвертого порядка.
Графики переходного процесса и производных
xxx
,,
во времени
приведены на рис. , а. В системе имеется ограничение ускорения
78

доп
xx
. Из рисунка видно, что для управления координатой
необходимо два участка стабилизации
доп
x
и три цикла управления по
выводу
x
ее допустимое значение
доп
x
. Для того чтобы управлять
ускорением, необходимо
2)24()( кт
интервала управления. Число
участков стабилизации равно номеру ограниченной производной, т. е.
r. Число циклов управления координатой равно (k + 1), считая конец
управления. Таким образом, получаем, что всего необходимой N = (п
—k)(k+1) интервалов управляющего сигнала и k участков
стабилизации. Для данной системы необходимо
632 N
интервалов
управления, в то время как при отсутствии ограничений на ускорение
N=3. Отсюда можно сделать вывод об усложнении алгоритма, а
следовательно, и управляющего устройства. Алгоритм изменения
показан на рис.4.10, а. Изменение и на участках стабилизации
constx
доп
не показано, так как зависит от методов стабилизации
ускорения. На рис.4.10, б приведены графики для системы третьего
порядка при ограничении на все производные
xxx
,,
. Так как в
системе имеется ограничение старшей производной
x
, которая может
изменяться скачком при релейном законе и, то
x
будет достигать
значения
доп
x
мгновенно.
79

График изменения u на рис. 4.10,б не показан, так как на каждом
интервале управления необходимо обеспечить стабилизацию одной
из координат.
Изменение
x
имеет релейный характер, поэтому
,x
будет изме-
няться по линейному закону, а
,x
по квадратичному закону на
участках, где соответственно
доп
xx
и
доп
xx
. Выходная координата х
на участке
1
0 t
будет изменяться по кубическому закону, на участке
21
tt
по параболическому, на участке
32
tt
снова по кубическому, на
43
tt
-линейному. То же самое будет происходить и в области
торможения
54
tt
. Всего для управления координатой х необходимо
семь интервалов управления. Закон изменения его определяется, как
указывалось, способом стабилизации
xxx
,,
.
При изменении порядка дифференциального уравнения системы
число участков стабилизации и циклов управления координатой не
меняется, изменяется только число интервалов управляющего сиг-
нала (n-k).
80
Рис. 4.10. Переходные процессы при ограничении координат:
а - ограничение ускорения
доп
xx
в системе четвертого порядка: б -
ограничение
xxx
,,
в системе третьего порядка.