Ляпидов В.C. Теоретические основы кибернетики. Методы оптимизации
Подождите немного. Документ загружается.

Стабилизация
)(k
доп
x
должна осуществляться специальными мето-
дами в случае условных ограничений, например применением про-
граммного способа в функции времени, с помощью обратной связи
по ограничиваемой координате, т. е. введением отсечек.
При наличии безусловных ограничений специальных мер по
стабилизации
)(k
доп
x
не требуется, так как сама система не может
достигнуть значений
)( k
x
>
)(k
доп
x
Проведем синтез алгоритма управления для объекта, который
описывается линейным дифференциальным уравнением третьего
порядка
max
2
21
3
3
21
)( kU
dt
dx
dt
xd
TT
dt
xd
TT
(4.67)
Требуется перевести координату объекта из начального по-
ложения
0,0,0 xxx
в положение
0,0, xxxx
n
при ограничении
доп
xx
.
Количество интервалов, необходимое для вывода координаты на
доп
x
, n - k=2. Число участков стабилизации скорости k = 1. Общее
количество интервалов управления
4)1)(( kknN
. Вид алгоритма
управления показан на рис.4.11, а. Требуется определить
.,,,,
54321
ttttt
Обозначим
допдоп
yxyx
dt
dx
,
Тогда уравнение (4.67) можно переписать
max21
2
2
21
)( kUy
dt
dy
TT
dt
yd
TT
(4.68)
Требуется координату
y
перевести из положения
0y
в поло-
жение
доп
yy
. По теореме об п интервалах для этого требуется два
интервала и одна смена знака. Моменты переключения определяются
из функции оптимального управления
0121
1121
max
tt
доп
ee
kU
y
0121
1222
max
tt
доп
ee
kU
y
(4.69)
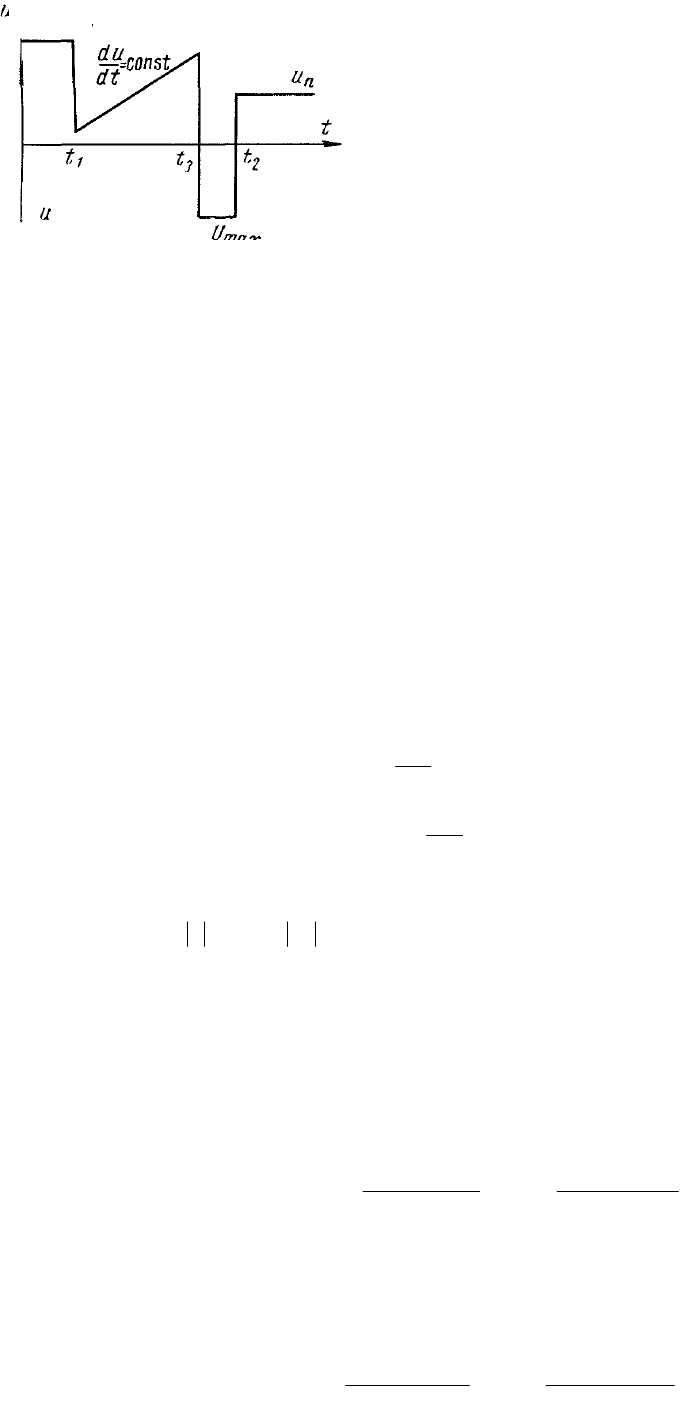
81

Рис.4.11. Процессы в системе третьего порядка при ограничении
а — изменение управляющего сигнала, б — изменение координат в
фазовом пространстве, в — изменение выходной координаты
При подходе к заданной точке следует затормозить объект, т.е.
перевести его из положения
доп
y
в положение у = 0. Для этого также
требуется два интервала управления. Моменты переключения
находятся из функции оптимального управления
0)1(2
0)1(2
max
max
42
52
4151
kU
y
ee
kU
y
ee
доп
tt
доп
tt
(4.70)
Значение
1
x
, отработанное за время вывода на допустимое
значение
доп
y
1 2
1
0
211
)()(
t t
t
dttydttyx
(4.71)
где
)(
1
ty
и
)(
2
ty
решения уравнения для первых двух интервалов.
Значение
3
x
, отработанное за время торможения,
dttydttyx
t
t
t
t
)()(
4
3
5
4
543
(4.72)
где
)(
4
ty
и
)(
5
ty
решения уравнения для последних двух
интервалов. Значение
2
x
, пройденное с постоянной скоростью,
231
xxxx
n
82

Время интервала стабилизации
доп
y
x
tt
2
23
(4.73)
На интервале стабилизации
k
y
U
доп
доп
.
Таким образом, за два интервала
1
t
и
2
t
было достигнуто
допустимое значение скорости
доп
y
; в течение времени
23
tt
координата изменилась с постоянной скоростью и за два интервала
4
t
,
5
t
произошло торможение.
На рис.4.11, б показана оптимальная фазовая траектория.
Плоскость S отделяет ту область фазового пространства, в которую
по условиям задачи не должны попадать координаты объекта. На
рис.4.11, в показан процесс во времени.
Чтобы подчеркнуть сложность алгоритмов управления с огра-
ничением координат, рассмотрим объект, который описывается диф-
ференциальным уравнением
доп
xxkUx
dt
dx
TT
dt
xd
TT
max,21
2
2
21
)(
(4.74)
Очевидно, и для такого объекта следует иметь два интервала
управления и один интервал стабилизации, если ограничена первая
производная
x
. На первом интервале система разгоняется до
доп
x
максимальным управляющим воздействием
max
U
. Чтобы сделать
constx
доп
, нужно управляющее воздействие изменять с постоянной
скоростью
const
dt
du
. При подходе к заданному значению
производится торможение отрицательным управляющим
воздействием -
max
U
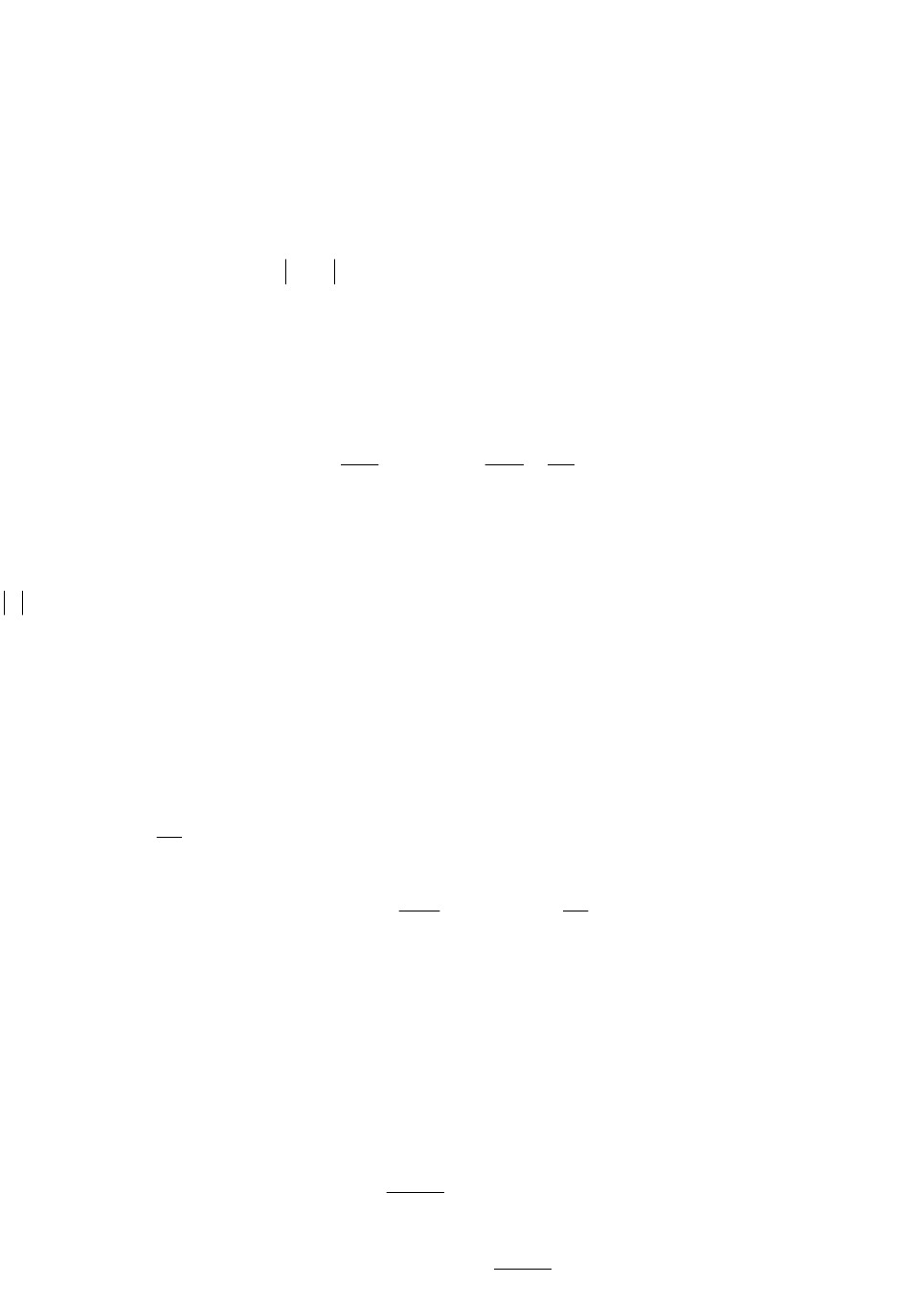
. Примерный вид алгоритма управления показан
на рис. 4.12. Такой алгоритм осуществить, конечно, очень сложно,
особенно на участке, где и меняется с постоянной скоростью.
83
Рассмотрим вкратце управления с
ограничением координат для объекта,
который характеризуется структурной
схемой, представленной на рис. . Так
как ограничение координат
достигается уменьшением общего
управляющего воздействия и, то,
ограничивая одну какую-либо ί-ю
координату, мы тем самым
ограничиваем и все остальные. В силу
этого дать четкие рекомендации о
количестве интервалов управления, как это было сделано ранее, не
представляется возможным. В каждом конкретном случае нужно
подвергнуть оптимальное управление анализу.
Сделаем это на примере двух параллельно включенных звеньев.
Анализ проведем на фазовой плоскости. Объект описывается
системой уравнений:
;
11
1
1
ux
dt
dx
T
;
22
2
2
ux
dt
dx
T
(4.75)
где
доп
xxUu
22max21
;;1
Начальные условия нулевые, объект за минимальное время пе-
реводится в точку
nn
ux
11
и
nn
ux
22
. Используя третий способ
нахождения фазовых траекторий, имеем для положительного
интервала и нулевых начальных условий
2max2
max2
2
1max1
max1
1
lnln
xU
U
T
xU
U
T
(4.76)
Для отрицательного интервала из условия прохождения траек-
тории через точку
nn
xx
21
,
получим
2max2
2max2
2
1max1
1max1
1
lnln
xU
xU
T
xU
xU
T
nn
(4.77)
84
Рис.4.12. Изменение
управляющего сигнала в системе
второго порядка при ограничении
x
Фазовые траектории, соответствующие оптимальному процессу,
показаны на рис. 4.13 а.
Ограничим координату
2
x
значением
доп
x
2
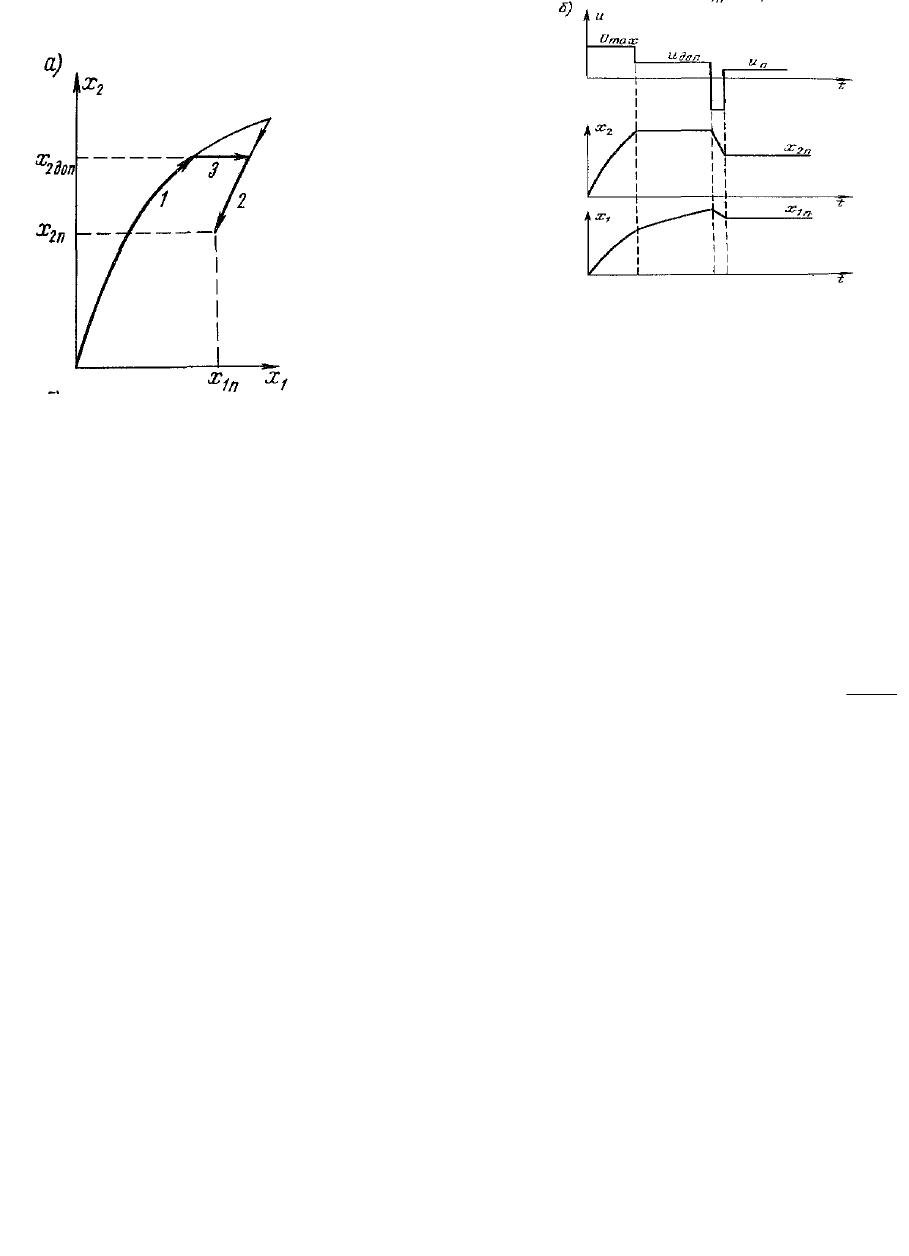
. Начнем оптимальное
управление максимальным сигналом
max
U
. Система будет двигаться
по участку 1 фазовой траектории. При достижении координаты
доп
x
2
управляющее воздействие скачком изменяется до значения
2
2
доп
доп
x
U
.
Координата
2
x
сразу примет значение
доп
x
2
и движение системы
далее пойдет по участку 3 фазовой траектории. В точке пересечения
отрезков фазовых траекторий 3 и 2 нужно подать на объект
максимальное отрицательное управляющее воздействие -
max
U
. Тогда
дальнейшее изменение координат до точки
nn
xx
21
,
произойдет по
отрезку 2 фазовой траектории. Оптимальная траектория с
ограничением координаты
2
x
выделена на рис.4.13, а жирными
линиями и стрелками. Алгоритм управления и переходный процесс
показаны на рис.4.13, б. Моменты переключения и изменения
управляющего воздействия с
max
U
на
доп
U
находятся способами,
рассмотренными выше. Если ограничения наложены на две
координаты, т.е. имеются
доп
x
1
,
доп
x
2
алгоритм усложняется. На
85
Рис. 4.13. Фазовые траектории, алгоритм управления и переходные
процессы при параллельном включении звеньев и ограничении одной
координаты
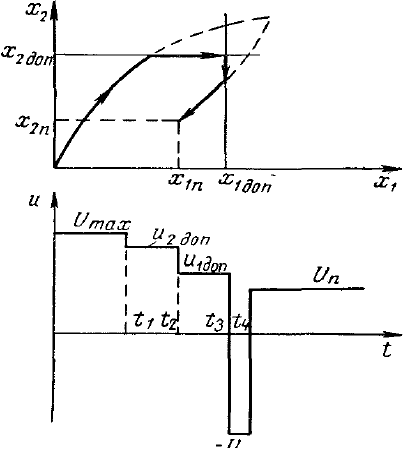
рис.4.14 показана фазовая траектория и управляющее воздействие для
случая ограничения двух координат. Как видно из рисунка, алгоритм
управления значительно усложнился и требует реализации четырех
моментов переключения.
86

Рис. 4.14. Алгоритм управления
и фазовые траектории при
параллельном соединении звеньев
и ограничении двух координат
4.5. Нахождение моментов переключения в нелинейных
оптимальных управлениях.
Как уже отмечалось, анализ и синтез управления объектами,
которые описываются нелинейными дифференциальными
уравнениями, представляет большие трудности. Это связано с тем,
что нет общих методов решения системы нелинейных
дифференциальных уравнений. Если система нелинейных
дифференциальных уравнений интегрируется, то определение
моментов переключения можно найти аналитически. В противном
случае следует применить тот или иной приближенный метод. Чтобы
показать методику определения моментов переключения, обратимся к
простейшему объекту, состоящему из двух последовательно
соединенных звеньев, которые описываются следующей системой
уравнений:
12
2
1
xx
dt
dx
u
dx
dx
(4.78)
где
1u
.
Последним уравнением описываются резервуары со свободным
истечением жидкости.
Требуется перевести координаты объекта из начального состоя-
ния при
0,0
21
xxt
в конечное
n
xx
11
и
n
xx
22
за минимальное время.
Как показывалось, для оптимального управления необходимо два
87
интервала и одна смена знака. Следовательно, необходимо
определить моменты переключения
1
t
и
2
t
.
Находим по первому способу уравнения фазовых траекторий при
1u
21
21
1
2
xx
u
xx
dx
dx
(4.79)
Сделаем в (4.79) замену для разделения переменных
2
12
xx
Подставляя
2
x
в нелинейное уравнение, имеем при и = 1
11
1
2
11
2 xx
dx
d
xx
(4.80)
или
21
1
1
d
x
dx
(4.81)
Интегрируя (4.81)
11
ln
21
ln C
d
x
(4.82)
Для сведения интеграла к табличному делаем новую подстановку
и=z
2
в (4.82)
1
2
1
ln
21
2
ln C
zz
zdz
x
(4.83)
Интегрируя (4.83) и делая обратные замены, получим
0ln)2ln(
2
1
5,0
ln
6
1
1
2
2121
21
21
Cxxxx
xx
xx
(4.84)
Проведя такое же решение при u = - 1, имеем
0ln)2ln(
2
1
7
14
7
1
2
2
2121
2
1
Cxxxx
x
x
arctg
(4.85)
Постоянную интегрирования
1
С
находим из начальных условий, a
2
С
из условия прохождения фазовой траектории через точку
nn
xx
21
,
.
88
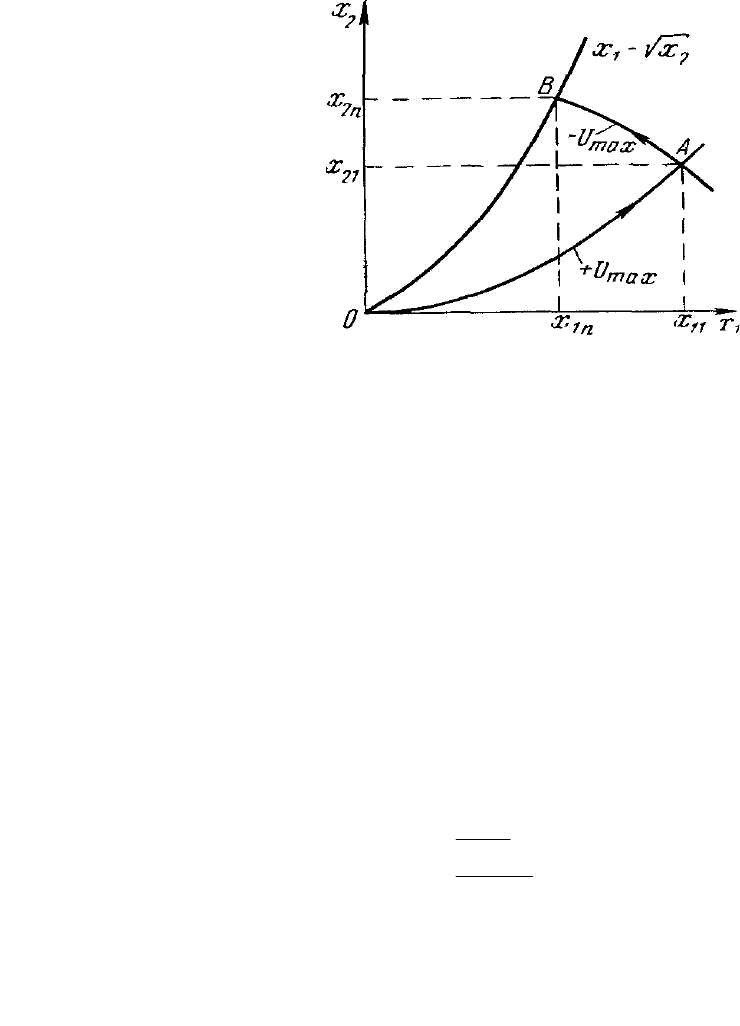
Рис.4.15.
Фазовые траектории
при управлении нелинейным
объектом.
Вид фазовых траектории в координатных осях
21
, xx
показан на
рис.4.15. Из оптимальной фазовой траектории ОАВ находим
координаты переключения
2111
, xx
.
Так как известны
nn
xx
1
,
, то, зная характер движения координаты
1
x
, можно определить моменты переключения из следующих
соотношений:
12
max
111
1
max
1
0
tt
U
xx
t
U
x
n
(4.86)
Моменты переключения определены относительно легко, так как
координата
1
x
имеет простой закон изменения во времени. Однако
построить фазовые траектории трудно, поскольку выражения для них
достаточно громоздки. Кроме этого, само уравнение фазовых
траекторий, хотя и с помощью двух подстановок, удалось про-
интегрировать. Если уравнения для фазовых траекторий не
интегрируются, то целесообразнее всего применить для нахождения
моментов переключения и фазовых траекторий графоаналитический
метод.
Запишем уравнения (4.78) в приращениях:
89

t
xx
x
t
u
x
21
2
1
(4.87)
Так как имеется два звена, то и построения следует вести в двух
координатных системах
)(,
21
uxux
. Отметим, что зависимость
ux
1
представляет собой прямую линию, совпадающую с осью ординат.
Отложим в координатных осях
ux
1
значения
1
max
U
. Отметим
точки начального и конечного состояний
0,0
21
xx
и
nn
xxxx
2211
,
на
статических характеристиках. Определяем угол наклона лучей
построения, учитывая, что
1
max
U
,
2
1
2
1
1
x
x
x
y
m
tm
arctg
m
tm
arctg
(4.88)
Начнем построение одновременно с начала первого и с конца
второго интервала. Из точек а и 1 в осях
1
x
проводим лучи по-
строения под углом
1
. Получим приращения
1
x
и
1
x
. Прираще-
ние
1
x
откладываем от точки О, а приращение
1
x
от точки
n
xb
2
в
осях
1
x
,
2
x
. Теперь из этих точек под углом
2
проводим лучи по-
строения. Построение ведем до тех пор, пока не получим в коорди-
90
Рис.4.16. Нахождение фазовых траекторий и процессов в оптимальной
системе графоаналитическим методом