Зырянов Г.В. Системы управления многосвязными объектами
Подождите немного. Документ загружается.

1
~
)(
~
)(
~
1
))(
~
1(1
)(
~
1
)(1
)(
)(
1
э
−=
−
=
−−
−
=
Φ−
Φ
=
−
ii
ii
ii
ii
ii
ii
ii
i
G
pG
pG
pG
pG
p
p
pW
. (4.4)
Отсюда видно, что = W
1
~
−
ii
G
эi
(p) + 1. Подставив это в (4.3) получим:
)()()()()()(1)()()(
~
ээ
1
prprppQpWpGpWpGpG
iiiiiiiiiiiii
<γ≤−=−+=−
−
. (4.5)
Из последней части полученного неравенства при p=jω следует, что годограф
эквивалентной частотной передаточной функции
i-го разомкнутого канала W
эi
(jω)
будет полностью локализован в
полосе, образованной кругами Гершгорина с ра-
диусами
r
i
(ω) и центрами в точках годографа i-го диагонального элемента Q
ii
(jω)
матрицы
Q(jω) разомкнутой МСАР. Отсюда следует достаточный критерий Найк-
виста для МСАР со «слабыми» перекрестными связями.
• Если
сумма обходов годографами всех Q
ii
(jω) равна r/2, а критическая точка
(–1,
j0) не попадает ни в одну из полос Гершгорина, окружающих АФЧХ сепарат-
ных каналов, то такая МСАР будет устойчивой. Здесь
r – это число правых харак-
теристических корней (с учетом кратности) разомкнутой МСАР. В общем случае
r будет равно сумме рангов матричных вычетов в правых полюсах для матрицы
Q(p). И только в простых случаях r может оказаться равным числу правых полю-
сов передаточной матрицы разомкнутой МСАР
Q(p).
Примечательно то, что
радиусы кругов Гершгорина
|)(|)(
∑
ω
=ω
≠ij
jii
jQr
на
каждой из фиксированных частот ω определяются только значениями недиаго-
нальных элементов
i-го столбца матрицы Q(jω) разомкнутой МСАР. Поэтому они
не будут зависеть от передаточных функций сепаратных регуляторов в других ка-
налах, хотя сами
W
эi
(jω) зависят от них в пределах полосы локализации. Благода-
ря этому появляется возможность определять корректирующее устройство в
i-м
канале, не влияя на результаты коррекции в других каналах и наоборот.
Таким образом, оценку устойчивости, а также и синтез корректирующих
звеньев последовательного типа в каждом канале можно осуществлять на основе
рассмотрения частотных характеристик отдельных контуров методами и средст-
вами расчета одномерных систем, если ориентироваться на «размытые» полосами
Гершгорина АФЧХ разомкнутых сепаратных каналов. При этом удобно исполь-
зовать логарифмические частотные характеристики, так как при включении по-
следовательного корректирующего звена в
i-м канале с передаточной функцией
W
ki
(p), только элементы i-го столбца матрицы Q(p) умножаются все на W
ki
(p), а
остальные столбцы остаются без изменений.
Но так как модуль «желаемой» ПФ
i-го канала |W
жi
(p)| = |W
эi
(p)||W
ki
(p)| и ради-
ус |
r
жi
(p)| = |r
i
(p)||W
ki
(p)| получаются одновременным умножением на |W
ki
(p)|, то
границы полосы Гершгорина для желаемой ЛАХ
L
жi
(ω) получаются сложением
ординат границ области локализации
L
эi
(ω) с соответствующими ординатами
ЛАХ корректирующего звена
L
кi
(ω). Аналогичным образом (смещением на ϕ
кi
(ω))
будут получены и границы для областей локализации желаемых фазовых харак-
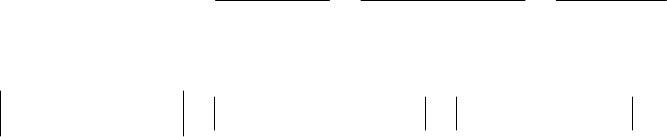
теристик. Пример расположения областей локализации ЛАХ, соответствующих
передаточным функциям
W
эi
(p), W
жi
(p) и W
ki
(p), показан на рис. 4.1.
91

Из (4.5) следует, что требования по качеству работы МСАР в установившемся
режиме будут обеспечены, если нижняя граница области локализации желаемой
ЛАХ
i-го канала будет располагаться выше границы L
гр
(ω
k
) запрещенной (по точ-
ности) области:
20lg(
|)(| |)(|
kikii
rjQ
ω
−
ω
) + L
кi
(ω)
> L
гр
(ω
k
).
В частности, если заданы ограничения на коэффициенты амплитудных (δ
ak
) и
фазовых (δ
ϕk
) искажений, вносимых i-м каналом на наборе частот {ω
k
}, то усло-
вие по точности для этого канала принимает следующий вид
20lg(
|)(| |)(|
kikii
rjQ
ω
−
ω
)+L
кi
(ω) > 20lg (1/ρ
k
),
где параметр ρ
k
= min(sin δ
ϕk
, δ
ak
/(1+δ
ak
).
Процедура синтеза корректирующих устройств для каждого из
n каналов ре-
гулирования в составе МСАР со «слабыми» связями отличается от аналогичной
процедуры для одномерных систем только двумя особенностями:
а) синтезируемые корректирующие устройства не должны нарушать при ω≥0
диагональной доминантности матрицы
G (jω) = 1+ Q(jω);
б) необходимо, чтобы ограничительным условиям, накладываемым на «же-
лаемую» частотную характеристику (запасы устойчивости, частота среза, точ-
ность) удовлетворяла вся область локализации для
L
жi
(ω) и W
жi
(jω), так как точ-
ные их значения будут зависеть от остальных корректирующих устройств и могут
занимать любое положение внутри областей их локализации.
Ширину областей локализации Δ
i
(ω) на каждой из частот ω в плоскости ЛАХ
можно оценить следующим образом. Из неравенства (4.5) непосредственно сле-
дует оценка для АЧХ:
|
Q
ii
(jω)| – r
i
(ω) < |W
эi
(jω)| < |Q
ii
(jω)| + r
i
(ω).
Переходя к логарифмическим частотным характеристикам, найдем нижнюю
L
нi
(ω) и верхнюю L
вi
(ω) границы для L
эi
(ω), а затем и ширину области неопреде-
ленности расположения этой ЛАХ:
Δ
i
(ω) = L
вi
(ω) – L
нi
(ω) =
)(|(|
)(|(|
lg20
ω−ω
ω
+
ω
iii
iii
rjQ
rjQ
.
Отсюда видно, что величина Δ
i
(ω) не меняется при подключении последова-
тельного корректирующего звена с передаточной функцией
W
ki
(p), т.к. это приво-
дит к одновременному умножению |
Q
ii
(jω)| и r
i
(ω) на сомножитель |W
ki
(jω)|. По-
этому области локализации для
L
жi
(ω) и L
эi
(ω) будут смещены на L
кi
(ω).
Столь же просто можно показать, что ширина полосы локализации фазовой
частотной характеристики равна Δϕ
i
(ω)= 2arcsin [r
i
(ω)/Q
ii
(jω)] и она также не бу-
дет зависеть от свойств
i-го сепаратного регулятора.
Последовательность действий при использовании метода прямых массивов
Найквиста выглядит следующим образом.
1. Определить передаточную матрицу (ПМ) объекта управления
W
0
(p) и со-
ответствующую матрицу возвратных разностей (МВР)
G(p) = E+W
0
(p).
92
2. Построить частотные годографы для
W
0ii
(p) и нанести круги Гершгорина с
центрами на этих годографах. МВР
G(p) будет доминантной, если полосы
Гершгорина для
W
0ii
(jω) при ω≥0 для i=1, 2,…, n не содержат точку (–1, j0).
3. Если матрица
G(p) не является доминантной, то выбрать предкомпенсатор,
добиваясь того, чтобы полосы кругов Гершгорина, построенных для ПМ
расши-
ренного
объекта Q(p)=W
0
(p)P(p) не содержали критической точки (–1, j0).
4. Оценить точки пересечения массивами Найквиста (полосами Гершгорина
для всех
W
0ii
(jω)) отрицательной части вещественной оси и, применяя достаточ-
ный критерий, оценить устойчивость замкнутой МСАР.
5. На основе массивов Гершгорина (или Островского) построить область лока-
лизации частотной характеристики разомкнутого контура и выбрать ПФ локаль-
ного регулятора
W
ki
(p), обеспечивающую требуемое качество процессов в данном
контуре любым известным способом (например, с помощью ЛАХ).
6. Изменить элементы матрицы предкомпенсатора
P(p) в соответствии с ха-
рактеристиками построенных локальных регуляторов (каждый
i-й столбец ПМ
компенсатора умножается на
W
ki
(p)).
L
эi
(
ω)
L
жi
(
ω)
L
кi
(
ω)
L(ω
)
lg
ω
Рис. 4.1. Области локализации ЛАХ
0
Запрет по
точности
Недостаток рассмотренного метода в том, что иногда, особенно при большом
числе каналов регулирования
n, достаточные условия могут оказаться слишком
далекими от необходимых. Тогда степень неопределенности расположения эк-
вивалентных характеристик разомкнутого
i-го канала будет большой, что приво-
дит к сильно «размытым» областям их локализации. Одним из способов сужения
областей локализации является использование более сильных условий доминант-
ности матриц, получаемых, например, с помощью кругов Островского [2].
Метод обратных массивов Найквиста
Аналогичные результаты для анализа и синтеза диагонально-доминантных
МСАР можно получить методом обратных массивов Найквиста (ОМН), в кото-
ром используются не прямые, а обратные передаточные матрицы.
Пусть Q(p) – передаточная матрица разомкнутой, а Ф(p) = [E+Q(p)]
–1
Q(p) –
передаточная матрица замкнутой МСАР в структуре с ЕООС. Допуская сущест-
вование обратных матриц, запишем
Ф
–1
(p) =
)(
~
pΦ
= Q
–1
(p)[E+Q(p)] = Q
–1
(p) + E.
Тогда, предполагая диагональную доминантность матрицы
)(
~
pΦ
= Ф
–1
(p),
можно формально записать для нее выражение, аналогичное (4.2):
93
)()()()(
~
)(
1
prprppΦpΦ
iiiiiii
<γ≤−
−
, (4.6)
где r
i
(p) – радиусы кругов Гершгорина для матрицы
)(
~
pΦ
=Ф
–1
(p).
При этом формулы коэффициентов γ
i
(p), с помощью которых определяются
радиусы кругов Островского этой матрицы, будут иметь вид
1)(
~
1/)(
max
)(
~
/)(
max
)(
,,
<
⎭
⎬
⎫
⎩
⎨
⎧
+=
⎭
⎬
⎫
⎩
⎨
⎧
=γ
≠≠
pQprpΦprp
jjj
ijj
jjj
ijj
i
,
где
)(
~
pΦ
=1+ – j-й диагональный элемент матрицы Ф)(
~
pQ
jj
–1
(p), а – j-й
диагональный элемент матрицы
= Q
)(
~
pQ
jj
)(
~
pQ
–1
(p).
Воспользуемся, как и ранее, приемом эквивалентирования относительно
i-го
канала регулирования. Пусть
W
эi
(p) = R
i
(p)W
0i
(p) – эквивалентная передаточная
функция разомкнутого
i-го канала, R
i
(p) – передаточная функция сепаратного ре-
гулятора в этом канале, а
W
0i
(p) – передаточная функция «эквивалентного объек-
та», полученная с учетом того, что все остальные каналы регулирования замкну-
ты с помощью единичных отрицательных обратных связей. Если
Ф
ii
(p) – переда-
точная функция замкнутого
i-го канала, которая является i-м диагональным эле-
ментом передаточной матрицы замкнутой МСАР
Ф(p) = [E+Q(p)]
–1
Q(p), то пере-
даточные функции
Ф
ii
(p) и W
эi
(p) будут связаны между собой следующими соот-
ношениями (формулы замыкания для одномерных контуров):
W
эi
(p) = Ф
ii
(p)/(1– Ф
ii
(p)) ; 1)(
11
э
−=
−
−
iii
ΦpW .
Подставив второе из этих равенств в (4.6), получим
)()()( |)(
~
)(|
1
э
prprppQpW
iiiiii
<γ≤−
−
. (4.7)
Отсюда следует, что обратный годограф Найквиста разомкнутого
i-го канала
(при условии, что остальные каналы замкнуты) будет локализован в полосе, обра-
зованной кругами Островского и Гершгорина с центрами на частотном годографе
i-го диагонального элемента обратной передаточной матрицы = Q)(
~
pQ
–1
(p).
Если γ
i
→ 0, то радиусы кругов Островского уменьшаются и → ,
а полоса (массив кругов) Островского будет приближаться к АФЧХ . По-
этому частотные характеристики диагональных элементов обратной матрицы
=
Q
)(
1
э
pW
i
−
)(
~
pQ
jj
)(
~
pQ
jj
)(
~
pQ
–1
(p), при условии ее доминантности вместе с матрицей
)(
~
pΦ
= Ф
–1
(p),
могут быть использованы для исследования устойчивости МСАР на основе ана-
лиза обратных массивов Найквиста.
Напомним, что замкнутая МСАР устойчива если, когда
разность между чис-
лом охватов начала координат частотными годографами функций |
E+)| и
|)| равна
r/2, где r – количество «правых» характеристических корней разомк-
нутой МСАР (с учетом кратности), соответствующих корням уравнения |)|=0.
(
~
pQ
(
~
pQ
(
~
pQ
Достаточный критери устойчивости Найквиста предполагает, что при
p=jω
обе матрицы ) и E+) являются диагонально-доминантными:
й
(
~
pQ (
~
pQ
94
),(|)(
~
| |)(
~
| ω=
∑
ω>ω
≠
i
ij
ijii
rjQjQ
(4.8)
),(|)(
~
| |)(
~
1| ω=
∑
ω>ω+
≠
i
ij
ijii
rjQjQ ω≥0, i=1, 2, …, n. (4.9)
Поскольку число охватов частотным годографом определителя DD-матрицы
начала координат совпадает с суммарным числом охватов годографами диаго-
нальных элементов начала координат, то отсюда следует следующий важный для
исследования МСАР со «слабыми» связями результат.
♦ Для устойчивости замкнутой МСАР
достаточно, чтобы разность между
суммарными числами оборотов, которые совершают годографы
всех диагональ-
ных элементов вокруг точки (–1,
j0) и вокруг начала координат равнялась
r/2, где r – число «правых» характеристических корней разомкнутой системы (с
учетом их кратности), совпадающих с «правыми» корнями уравнения
. При этом критическая точка и начало координат не будут попадать
в полосы Гершгорина и Островского.
)(
~
ωjQ
ii
0)(
~
det =pQ
Последовательность действий при использовании метода обратных массивов
Найквиста (ОМН) для анализа и синтеза МСАР имеет следующий вид:
1. Определить обратную ПМ объекта управления .
)()(
~
1
00
pp
−
= WW
2. Построить частотные годографы для
)(
~
0
pW
ii
и нанести круги Гершгорина.
3. Если обратная ПМ объекта не доминантная (начало координат попадает в
одну из полос Гершгорина), то выбором предкомпенсатора, обеспечить доми-
нантность
расширенного объекта с обратной ПМ = Q)(
~
pQ
–1
(p) = P
–1
(p)
)(
~
0
pW
.
4. Проверить доминантность , построив годографы и нанеся круги
Гершгорина для каждого из них (они не должны содержать начало координат).
)(
~
pQ )(
~
pQ
ii
5. Оценить точки пересечения обратными массивами Найквиста (полосами
Гершгорина) отрицательной части вещественной оси и, применяя достаточный
критерий, оценить устойчивость замкнутой МСАР.
6. На основе массивов Гершгорина (или Островского) построить область лока-
лизации частотной характеристики разомкнутого контура и выбрать ПФ локаль-
ного регулятора
W
ki
(p), обеспечивающую требуемое качество процессов в данном
контуре любым известным способом (например, с помощью ЛАХ).
7. Изменить элементы матрицы предкомпенсатора
P(p) в соответствии с ха-
рактеристиками построенных локальных регуляторов (каждый
i-й столбец матри-
цы компенсатора умножается на
W (p)).
95
ki
Несмотря на концептуальную простоту, из-за громоздкости и сложности по-
строений и расчетов, применение методов МН и ОМН в инженерной практике
без человеко-машинных средств анализа и синтеза оказывается нереальным. При
этом весьма важным и сложным этапом применения этих методов является вы-
бор компенсатора, обеспечивающего доминантность обратных передаточных
матриц или матрицы возвратных разностей. Для этой цели известны несколько
способов, но все они, как правило, являются слишком сложными для практиче-
ского использования. Поэтому часто пытаются ограничиться выбором простей-
шего компенсатора, обеспечивающего диагональную доминантность только на
низких частотах. В частности, обратную ПМ компенсатора назначают в виде
)0()(
~
0
WP =p
, а если при этом у ПМ W
0
(p) будет полюс p=0 с коэффициентом
кратности ν, то обратная ПМ компенсатора выбирается в виде
)(
~
lim
0
pp
p
GP
ν
→
=
.
4.3. Синтез оптимальных МСАР при случайных входных воздействиях
4.3.1. Синтез МСАР устойчивым минимальнофазовым объектом
Рассмотрим аналитический синтез МСАР следящего типа, находящейся под
воздействием стационарных случайных полезных сигналов и помех. Это означает,
что дополнительные ошибки, связанные с переходными процессами при включе-
нии системы не учитываются. При этом за показатель качества принимается
сумма взвешенных дисперсий ошибок
∑
∫
π
=ρ=
∞
∞−
j
j
eeeiie
dpp
j
DJ ])(Sp[
2
1
RS , (4.10)
где S
ee
(p) при p=jω – спектральная матрица ошибок; R=diag{ρ
i
}– матрица весовых
коэффициентов, назначаемых с учетом «важности» и индивидуальных особенно-
стей каждого из каналов регулирования МСАР.
Ограничительные условия 2 – 6 (см. п. 4.1), выраженные в интегральной фор-
ме позволяют применить единый подход к задачам синтеза МСАР, оптимальных в
смысле минимума показателя (4.10).
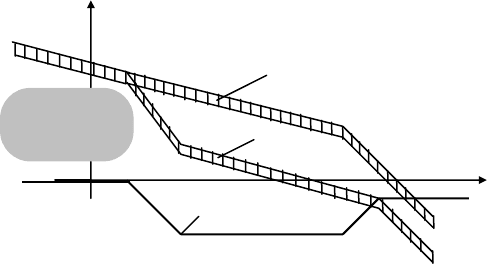
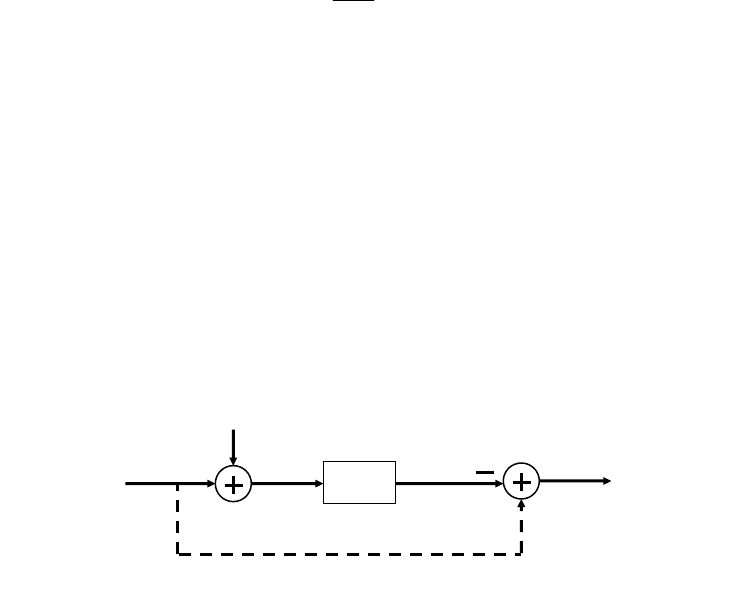
Для конкретности, рассмотрим МСАР, на вход которой поступает аддитивная
смесь
полезного сигнала s(t) и помехи n(t): r(t)= s(t) + n(t), где s(t) и n(t) – реали-
зации случайных стационарных процессов (ССП) с нулевыми средними значе-
ниями (
m
s
= m
n
= 0). Схема формирования сигнал ошибки показана на рис. 4.2.
96
Рассмотрим простейший случай, когда воздействия
s(t) и n(t) не коррелирова-
ны между собой
, а объект управления (заданная часть системы) устойчивый и
минимальнофазовый с передаточной матрицей W
0
(p), не имеющей «правых» ну-
лей и полюсов. При этом требование устойчивости МСАР не накладывает допол-
нительных ограничений на вид ПМ
Ф(p), а единственное условие, ограничиваю-
щее свободу ее выбора, связано с физической реализуемостью регулятора:
Ф(p)
– произвольная устойчивая рациональная матрица, все элементы которой имеют
степень числителя меньше (по крайней мере – на единицу), чем порядок знаме-
нателя.
Предположим, что известны спектральные матрицы входных сигналов
S
ss
(p) и
S
nn
(p), а матрицы взаимных спектральных плотностей нулевые, т.е.
Ф(p)
s(t)
n(t)
(t) y
e
r
(t)
(t)
Рис. 4.2. Схема формирования ошибки МСАР при случайных сигналах
S
sn
(p)=S
ns
(p)=0. Тогда, в соответствии с результатами п. 3.3.4, спектральная мат-
рица МСАР
S
ee
(p) определяется формулой
S
ee
(p)= . (4.11) )()()()}(){()}({ pppppp
T
nn
T
ss
ΦSΦΦESΦE −+−−−
Задача динамического синтеза сводится к определению
Ф(p) ={Ф
ij
(p)} из усло-
вия минимума функционала точности
∑
∫
π
=ρ=
∞
∞−
j
j
eeeiie
dpp
j
DJ ])(Sp[
2
1
RS .
Для решения этой задачи используется
необходимое условие минимума функ-
ционала
J
e
в виде равенства нулю вариации δJ
e
, вызванной вариациями δФ
ik
(p) и
δ
Ф
ik
(–p) элементов передаточных матриц Ф(p) и Ф(–p).
С учетом формулы для
J
e
, это условие оптимальности можно записать в виде
dpp
pΦ
p
j
dppΦ
pΦ
p
j
J
ik
j
j
ki
ik
ee
ik
j
j
ki
ik
ee
e
)(
)(
])(Sp[
2
1
)(
)(
])(Sp[
2
1
,,
−Φδ
∫
∑
−∂
∂
π
+δ
∫
∑
∂
∂
π
=δ
∞
∞−
∞
∞−
RSRS
= 0.
Поскольку по свойству четности
S
ee
(p) = S
ee
(–p), то первый интеграл сводится
ко второму заменой
p на –p, а их значения будут одинаковыми и равными нулю:
dpp
pΦ
p
j
ik
j
j
ki
ik
ee
)(
)(
])(Sp[
2
1
,
−Φδ
∫
∑
−∂
∂
π
∞
∞−
RS
= 0.
При отыскании решений, удовлетворяющих условию устойчивости, все ва-
риации δ
Ф
ik
(p) должны иметь особые точки (полюсы) только слева от мнимой
оси. Но тогда все δ
Ф
ik
(–p) будут аналитическими функциями в левой полуплос-
кости. Таким же свойством должны обладать и все частные производные:
)(
)(
])(Sp[
pq
pΦ
p
ik
ik
ee
−
=
−∂
∂ RS
, i = 1, 2, …, n; k = 1, 2, …, n, (4.12)
где – некоторые рациональные функции, аналитические в левой полуплос-
кости, т.е. не имеющие «левых» полюсов. Эти равенства представляют собой сис-
тему
n
)( pq
ik
−
2
уравнений, которые используются для определения элементов передаточ-
ной матрицы оптимальной МСАР. Их принято записывать в матричном виде:
)(
)(
])(Sp[
p
p
p
ee
−
=
−∂
∂
Q
Φ
RS
, (4.13)
где
Q
–
(p) = { })( pq
ik
−
n
x
n
– неизвестная рациональная матрица, аналитическая в ле-
вой полуплоскости.
Для получения уравнений оптимальной МСАР в явном виде, воспользуемся
правилом дифференцирования следа от произведения двух матриц
T
B
A
AB
=
∂
∂
}Sp{
. (4.14)
97
С учетом (4.11), применим его к произведению S
ee
(p)R:

).()()()()()]()()[(
)()())((
)(
})({
pppppppp
ppp
p
p
T
ss
TT
rr
TT
ss
TT
nnss
T
T
nn
TT
ss
T
ee
−
=−=−+=
=+−−=
−∂
∂
QSRSΦRSRSSΦR
SΦRSΦER
Φ
RS
(4.15)
Последнее равенство обычно записывают в транспонированном виде:
.)()()()(
−
=− pppp
T
ss
T
rr
QRSRΦS (4.16)
В более общем случае, когда входные сигналы МСАР s(
t) и n(t) коррелирова-
ны между собой, то уравнение оптимальной МСАР запишется так:
−
=− )()()()( pppp
T
rs
T
rr
QRSRΦS , (4.17)
где S
rs
(p) – матрица взаимных спектральных плотностей сигналов r(t) и s(t).
Это уравнение Винера – Хопфа в комплексной области для определения опти-
мальной передаточной матрицы МСАР Ф(
p).
Так как R=diag{ρ
i
} не особая, то умножая обе части равенств (4.16) и (4.17)
справа на R
–1
, можно утверждать, что результат оптимизации МСАР не будет за-
висеть от выбора коэффициентов ρ
i
. Поэтому далее можно считать, что все ρ
i
= 1.
Если входные сигналы в
различных каналах некоррелированы между собой, то
матрицы S
rr
(p) и S
rs
(p) будут диагональными и, как следствие, искомая переда-
точная матрица Ф(
p) окажется также диагональной, а МСАР автономной.
В общем случае, матричное равенство (4.17) эквивалентно системе
nxn скалярных
уравнений, которая распадается здесь на
n независимых групп по n уравнений в
каждой. Каждая из них с фиксированным номером ν имеет вид
∑
=−Φ
=
−
νν
ν
n
k
isrkrr
pqpSppS
iki
1
)()()()(; i = 1, 2, …, n; ν = 1, 2, …, n. (4.18)
При этом выход ν-го канала МСАР зависит только от передаточных функций,
расположенных в ν-й строке матрицы Ф(
p):
∑
=
=
νν
n
k
kk
prpΦpy
1
)()()( .
В связи с этим факт распадения уравнений на n независимых групп означает,
что ошибки
e
ν
(t) = s
ν
(t) – y
ν
(t) по каждому ν-му каналу оптимальной МСАР могут
рассматриваться независимо. Передаточные функции
Ф
νk
(p) при фиксированном
ν, т.е. ν-я строка матрицы Ф(
p), удовлетворяют при этом условию минимума дис-
персии ν-й составляющей вектора ошибки
)}({ teMD
e νν
=
. Отсюда следует, что
если за показатель качества взять
J
e
=
∑
ρ
νν e
D
, то оптимальные характеристики
системы не будут зависеть от выбора весовых коэффициентов ρ
ν
.
Решение уравнений оптимальной системы даже в одномерном случае является
сложной задачей. Для многомерной МСАР эти трудности многократно возраста-
ют. В связи с этим, остановимся кратко на способах их решения.
В общем случае коррелированных входных сигналов элементы передаточной
матрицы {
Ф
νk
(p)} оптимальной системы определяются как решения уравнений
вида (4.18). Их можно записать в эквивалентном матричном виде:
98

)()()]()[(
pppp
rs
T
rr
−
ν
ν
=−
ν
qSΦS , ν=1, 2, …, n, (4.19)
где – строка с номером ν матрицы Ф(p); и – столбцы с номе-
ром ν для матриц
S
)( p
ν
Φ
)( p
rs
ν
S
)( p
−
ν
q
rs
(p) и Q
–
(p) соответственно.
В том случае, когда входы
j-го и k-го каналов некоррелированы, эта система
распадается на
n
2
независимых уравнений
)()()()(
pqpSppS
ksrkrr
kkk
−
νν
=−Φ
ν
, k =1, 2, …, n; ν =1, 2, …, n. (4.20)
Каждое из этих уравнений служит для определения одного из элементов мат-
рицы
Ф(p). При этом решение задачи синтеза сводится к рассмотрению n
2
одно-
мерных случаев. Способы решения уравнений (4.20) хорошо известны. Один из
них основан на факторизации функции спектральной плотности входного сигнала
. Этот метод может быть обобщен и на многомерный случай. Однако для
решения уравнения оптимальной МСАР в общем случае более пригоден метод
неопределенных коэффициентов с предварительным определением полюсов [9].
Суть этого метода состоит в следующем. Сначала находится
формальное алгеб-
раическое решение
уравнений (4.19), которое используется только лишь для оп-
ределения
полюсов оптимальных ПФ Ф
)( pS
kk
rr
νk
(p). Это решение имеет следующий вид:
[]
)]()()[()(
~
1
pppp
rsrr
T
ν
+=
−
ν
−ν
ΦqSΦ
. (4.21)
Поскольку решение задачи разыскивается в классе устойчивых и физически
реализуемых систем, то в качестве полюсов
Ф
νk
(p) принимаются все те полюсы
решений (4.21), которые расположены слева от мнимой оси. Такими
полюсами
будут являться «левые» нули μ
i
определителя матрицы S
rr
(p) и «левые» полюсы γ
j
матрицы . Тогда решение уравнения (4.19) для
Ф
)( p
rs
ν
Φ
νk
(p) необходимо оты-
скивать в виде рациональных функций с полюсами μ
i
и γ
j
и неопределенными ко-
эффициентами полиномов
A
νk
(p) в числителе:
Ф
νk
(p)=
∏∏
γ−μ−
ν
)()(
)(
ji
k
pp
pA
. (4.22)
После подстановки (4.22) в исходные уравнения (4.20) левая часть полученных
равенств будет всегда содержать как «левые», так и «правые» полюсы. Для того
чтобы функции (4.22) были решениями уравнений (4.20), необходимо выбрать не-
определенные коэффициенты полиномов
A
νk
(p) так, чтобы в левых частях полу-
чившихся уравнений не было слагаемых с левыми полюсами. Это достигается
путем разложения левых частей равенств на элементарные дроби и
приравнива-
нием нулю
тех слагаемых, которые соответствуют «левым» полюсам.
Полученные в результате такой процедуры равенства представляют собой
систему неоднородных линейных алгебраических уравнений относительно неоп-
ределенных коэффициентов полиномов
A
νk
(p). При этом число уравнений всегда
будет больше числа неизвестных коэффициентов (часть уравнений являются
следствием других), поэтому возникает дополнительная задача, связанная с отбо-
ром независимых уравнений.
99

После отыскания передаточной матрицы
Ф(p) оптимальной системы, задача
динамического синтеза МСАР сводится к выбору ее структурной схемы и опре-
делению передаточной матрицы корректирующего блока
W
k
(p). Обычно это
структура с последовательным корректирующим блоком (компенсатором) в цепи
ошибки. При этом, если все полюса и нули передаточной матрицы объекта
управления
W
0
(p) «левые», т.е. ОУ устойчивый и минимальнофазовый, то переда-
точная матрица
W
k
(p) определяется по известной формуле
11
0
)]()[()()(
−
−
−= pppp
k
ΦEΦWW . (4.23)
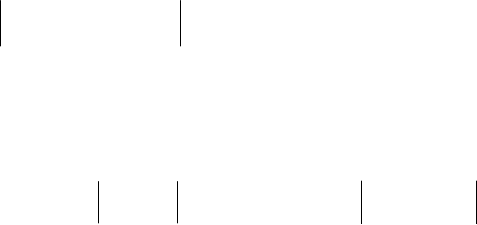
Структурная схема оптимальной МСАР приведена на рис. 4.3.
Ф(p)[E– Ф(p)]
–1
[W
0
(p)]
–1
1
W
0
(p)
y*(t)
y(t)
ε(t)
Рис. 4.3. Оптимальная МСАР минимальнофазовым объектом
W
k
(p)
Из данной схемы видно, что такое корректирующее устройство полностью
компенсирует динамические особенности объекта управления. Результатом этого
будет полное сокращение нулей и полюсов
W
0
(p) с появлением вырожденной
части в математической модели МСАР. Для устойчивости замкнутой системы
требуется, чтобы были устойчивыми как вырожденная, так и невырожденная час-
ти системы. При этом устойчивость
невырожденной части МСАР обеспечивается
расположением полюсов передаточной матрицы
Ф(p) слева от мнимой оси.
Для обеспечения устойчивости вырожденной части системы принципиально
недопустима компенсация «правых» нулей и полюсов W
0
(p) корректирующим
блоком. Это условие накладывает дополнительные ограничения на вид оптималь-
ной (желаемой)
Ф(p) и на предельно достижимое значение показателя качества. В
рассмотренном выше случае это требование выполняется, так как при получении
уравнений оптимальной МСАР объект управления предполагался устойчивым и
минимальнофазовым.
4.3.2. Синтез МСАР неминимальнофазовым объектом
Рассмотрим более общий, чем ранее случай, когда объект управления ОУ яв-
ляется также устойчивым, но неминимальнофазовым, т.е. его передаточная мат-
рица
W
0
(p) имеет нули в правой полуплоскости. Тогда для устойчивости вырож-
денной части
достаточно [9], чтобы передаточная матрица замкнутой системы
Ф(p) удовлетворяла условию
Ф(p)= g
–
(p) Ф
1
(p)
,
(4.24)
где g
–
(p) – полином, корни которого, с учетом их кратности, равны правым нулям
W
0
(p), а Ф
1
(p)= – произвольная рациональная матрица с «левыми»
нулями и полюсами. При таком выборе
Ф(p), передаточная матрица корректи-
рующего звена
W
)()(
1
11
pp
−
QP
k
(p) не содержит полюсов, совпадающих с «правыми» нулями
100