Зырянов Г.В. Системы управления многосвязными объектами
Подождите немного. Документ загружается.


Предположим сначала, что числовая матрица
Q
0
не вырождена, т.е. det (Q
0
)≠0,
а определители матриц
Q(D) и P(D) не имеют одинаковых корней. Тогда матрицы
A, B, C, D можно получить по следующим формулам, которые аналогичны соот-
ветствующим формулам одномерного анализа [9]:
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
=
−
−
−
−
1
01
1
01
1
0
QQE00
E0
QQ0E
QQ00
A
MM
K
K
r
r
; ; С = [0 0 … D]; D =
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
=
−−
DQP
DQP
DQP
B
11
11
M
rr
rr
0
1
0
PQ
−
. (2.53)
При этом размерность вектора состояния МДЗ будет равна N = nxr. Если мат-
рица
Q
0
вырождена, то такой способ приведения ММ МДЗ к нормальной форме
невозможен (система уравнений «вход-выход» МДЗ не нормализуема), а размер-
ность вектора состояния и порядок системы понижаются. Так, если det (
Q
0
)=0, а
det (
Q
1
)≠0, то порядок системы уравнений и многомерного динамического звена
N = n(r
−1) + r
0
, где r
0
− ранг матрицы Q
0
. Тем не менее, в каждом конкретном слу-
чае удается привести математическую модель МДЗ к системе уравнений первого
порядка, т.е. к форме уравнений состояния [9].
В общем случае, когда могут оказаться вырожденными и некоторые другие
коэффициенты матричного полинома
Q(D), порядок звена определяется форму-
лой N = n
хr − d, где d − дефект, т.е. разность порядка и ранга матрицы F:
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
− 011
12
01
0
QQQ
0QQ
00QQ
000Q
F
K
O
r
. (2.54)
После того, как матрицы
A, B, C, D будут получены, вопрос управляемости и
наблюдаемости МДЗ решается обычным образом по критерию Калмана. Кроме
того, известно достаточное условие (критерий) полной управляемости и наблю-
даемости – это отсутствие у определителей матриц
Q(p) и P(p) одинаковых кор-
ней. В то же время наличие одинаковых корней у этих определителей еще не сви-
детельствует о вырожденности системы.
♦Задача "III ⇒ I". Переход от передаточной матрицы МДЗ к уравнению
«вход-выход». Эта задача существенно более сложная, чем предыдущие. В общих
чертах рассмотрим один из возможных методов ее решения, представляющий со-
бой скорее теоретическую возможность, чем конструктивный алгоритм [9].
Пусть
W(p) − квадратная неособенная передаточная матрица МДЗ. Эле-
ментарными левыми преобразованиями (умножение строки на число; прибавление
к одной строке другой, умноженной на скалярный полином b(p); перестановка
строк) или правыми (аналогичные операции со столбцами) можно привести
W(p)
к специальной канонической форме
W(p) = S(p)V(p)T(p), (2.55)
41

где
S(p) и T(p) − элементарные полиномиальные матрицы, т.е. матрицы, опреде-
литель которых не равен нулю и не зависит от p;
V(p) – квадратная nxn рацио-
нальная матрица специального вида (каноническая диагональная матрица):
⎭
⎬
⎫
⎩
⎨
⎧
ψ
ϕ
=
)(
)(
diag)(
p
p
pV
i
i
. (2.56)
Здесь
ϕ
i
(p) и ψ
i
(p) взаимно простые (несократимые) полиномы с коэффициен-
том при старшей степени p равным единице; полином
ϕ
n
(p) среди полиномов
ϕ
1
(p), ϕ
2
(p), …, ϕ
n
(p) имеет наибольшую степень, причем каждый ϕ
i
(p) является
делителем для последующего
ϕ
i+1
(p). Полином ψ
1
(p) имеет наибольшую степень
среди полиномов
ψ
1
(p), ψ
2
(p), …, ψ
n
(p), причем каждый ψ
i
(p) является делителем
для предыдущего
ψ
i–1
(p). В частном случае, когда |Q(p)| и |P(p)| не имеют крат-
ных и одинаковых корней, эти полиномы будут иметь следующий вид:
ϕ
1
(p) = 1, ϕ
2
(p) = 1, …, ϕ
n
(p) = |P(p)|; ψ
1
(p) = |Q(p)|, ψ
2
(p) = 1, …, ψ
n
(p) = 1.
Представим
V(p) в следующем виде:
)()()()()(
11
ppppp ΦNNψV
−
−
=
, (2.57)
где
N(p) – произвольная элементарная матрица;
⎭
⎬
⎫
⎩
⎨
⎧
=
−
)(ψ
1
diag)(
1
p
p
i
Ψ
; =diag{ϕ
)( pΦ
i
(p)}. (2.58)
С учетом этого выражение (2.55) для W(p) можно записать в виде
)()()()()()()(
11
ppppppp TΦNNψSW
−
−
=
= Q
–1
(p)P(p), (2.59)
где
Q
–1
(p) = ; P(p) = . )()()(
11
ppp
−−
NψS
)()()( ppp TΦN
Тогда, в соответствии с (2.49) и (2.51) можно получить полиномиальные мат-
рицы левой и правой частей уравнения "вход – выход" МДЗ:
Q(D) = )()()(
1
DDD
−
SψN ; P(D) = . (2.60)
)()()( DDD TΦN
Получаемая таким способом система уравнений является невырожденной, т.е.
полностью управляемой и наблюдаемой. При этом ее порядок N равен порядку
характеристического полинома det
Q(p), который совпадает с суммой порядков
всех полиномов
ψ
i
(p). Необходимо отметить, что из-за произвольного вида эле-
ментарной матрицы
N(p) в (2.57) получаемое по передаточной матрице уравне-
ние «вход-выход» МДЗ (2.60) не является единственным.
Невырожденность системы следует из того, что полиномы
ϕ
i
(p) и ψ
i
(p) вза-
имно простые (нет общих делителей). Поскольку
N(p) и S(p) – это элементарные
матрицы, то характеристический полином системы с точностью до постоянного
множителя R будет совпадать с произведением полиномов
ψ
i
(p):
det
Q(p)) = det(N(p))⋅ det(ψ(p))⋅det(S
–1
(p)) = R det(ψ(p)) = R .
∏
=
n
i
i
p
1
)(ψ
42
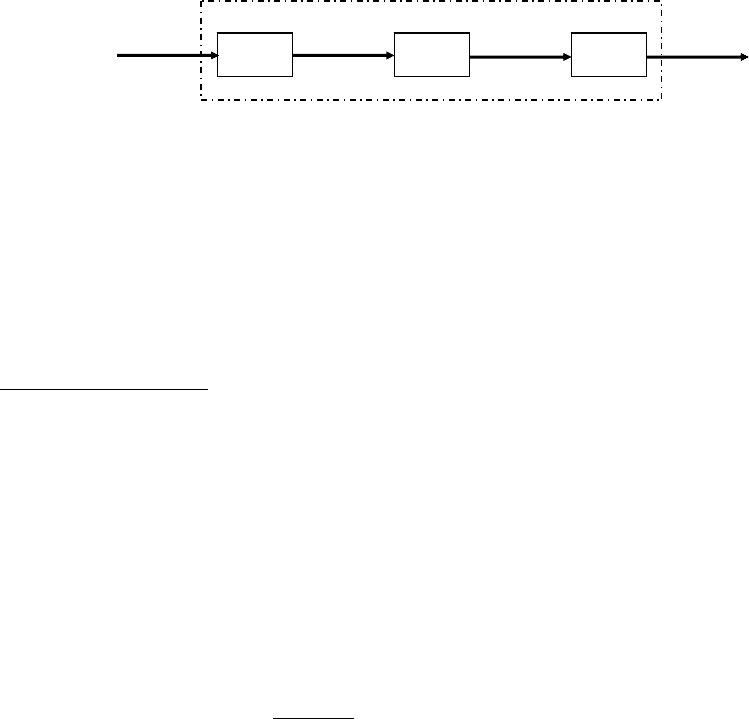
Каноническое представление
W(p) в виде (2.55) является более информатив-
ным в отношении порядка системы N и в отношении кратности характеристиче-
ских корней. Ему соответствует каноническая структура МДЗ (рис. 2.14). Дина-
мические особенности МДЗ определяются звеном с диагональной передаточной
матрицей
V(p) в этой структуре. Входы
)(
~
pu
и выходы
)(
~
py
этого звена называ-
ются главными координатами МДЗ.
T(p) V(p) S(p)
f
(
p
)
y
(
p
)
)(
~
p
u
)(
~
p
y
Рис. 2.14. Структура МДЗ в главных координатах
Два других звена с передаточными матрицами полиномиального вида T(p) и
S(p) не оказывают влияния ни на порядок, ни на характеристические корни МДЗ,
а определяют связь его с внешней средой по входу и выходу, а, следовательно, и
перекрестные связи между каналами. Некоторые методы синтеза МСАР ориенти-
рованы именно на такое каноническое структурное представление МДЗ, хотя сама
процедура получения этого представления плохо формализована.
♦Задача "III ⇒ II". Переход от передаточной матрицы МДЗ к уравнениям
состояния».
Ввиду сложности этой задачи, ограничимся случаем r простых полюсов пере-
даточной матрицы
W(p). Напомним, что p=p
k
называется полюсом передаточной
матрицы, если это значение является полюсом хотя бы для одного элемента W
ij
(p).
Полюс называется простым, если он не является кратным ни для одного из эле-
ментов матрицы
W(p). Кроме того, для простоты, будем предполагать, что поряд-
ки числителей W
ij
(p) меньше порядков знаменателей.
В этом случае
W(p) можно представить разложением на сумму элементарных
слагаемых:
∑
−
=
k
k
k
pp
p
1
)( GW
, где
{
}
)()(lim pppG
k
pp
k
k
W
−
=
→
. (2.61)
Пусть матричный вычет
G
k
имеет ранг ρ
k
. Такую кратность будет иметь соот-
ветствующий характеристический корень p
k
. В этом случае квадратную матрицу
G
k
всегда можно представить произведением двух прямоугольных матриц,
имеющих размеры n
xρ
k
и ρ
k
xn:
G
k
= C
k
BB
k
, (2.62)
Тогда формулы для матричных коэффициентов
A, B, C в уравнениях состоя-
ния МДЗ запишутся в следующем виде:
A = diag {p
k
E
k
}; B = colon {BB
i
}; C= [C
1
C
2
...C
r
], (2.63)
где
E
k
– единичная матрица размеров ρ
k
xρ
k
. При этом размерность вектора со-
стояния МДЗ определится как сумма рангов матриц
G
k
, т.е. N = .
∑
=
r
k
k
1
ρ
43
44
2.6. Структуризация многосвязных объектов управления
Особенностью многосвязных динамических звеньев (в том числе и МОУ) яв-
ляется то, что на изменения одного входа одновременно реагируют не менее двух
выходов. При этом скорости и интенсивности таких реакций могут быть как од-
ного порядка (соизмеримы), так и существенно различными.
• Для организации управления на основе принципа регулирования по откло-
нению МОУ должен быть обязательно структуризирован, т.е. в нем должны
быть предварительно выделены прямые (сепаратные) и перекрестные каналы
(связи) передачи воздействий. Во многих случаях решение этой задачи вполне
очевидно либо из физических соображений, либо на основе конструктивно-тех-
нологических признаков. Но иногда для этого необходимо выполнить специаль-
ный анализ интенсивностей взаимодействий отдельных каналов МОУ как в ста-
тике, так и в динамике.
К сожалению, в настоящее время не существует единого и универсального
подхода к решению этой важной задачи. Очевидно, такой проблемы не возникает,
когда МОУ линейный с равным числом входов и выходов, а его передаточная
матрица квадратная и диагональная, или удовлетворяет условию диагональной
доминантности (см. п. 2.8).
Формально задача структуризации сводится к отысканию таких пар (u
j
, y
i
), ко-
торые были бы в определенном смысле наиболее сильно связаны друг с другом,
чем остальные возможные пары. В таком случае эта пара образует i-й прямой (се-
паратный) канал передачи воздействия. Итогом структуризации, в конечном
счете, будет перенумерация (изменение номеров) входов и выходов МОУ таким
образом, чтобы входы и выходы с одинаковыми номерами образовывали сепарат-
ные каналы передачи воздействий. Только после этого можно приступать к орга-
низации отдельных каналов регулирования по отклонению.
Возможны различные подходы к решению этой проблемы. Наиболее извест-
ным является метод, предложенный Бристолем, основанным на анализе интен-
сивностей взаимодействий каналов в окрестностях статических режимов. Метод
основан на использовании коэффициентов чувствительности выходов МОУ y
i
к изменениям входов u
j
в разомкнутом и в условно замкнутом (с помощью иде-
ального регулятора) контуре управления.
Известны также попытки распространения идей этого оригинального подхода
на окрестность стационарных режимов других типов, а также на переходные
процессы. Рассмотрим этот метод, а также его модификации подробнее.
♦Метод Бристоля. Рассмотрим многосвязный, в общем случае нелинейный,
объект управления (МОУ), невырожденный на некотором множестве статиче-
ских режимов. Предположим, что все нелинейные зависимости (т.е. нелинейно-
сти) между переменными в составе математической модели МОУ линеаризуемы
в достаточно малых окрестностях этих режимов. Для такого МОУ было предло-
жено оценивать интенсивность взаимодействия каналов с помощью относитель-
ных коэффициентов чувствительности
λ
ij
, являющихся элементами матрицы
Бристоля
Λ={λ
ij
}:
ikconsty
i
j
jkconstu
j
i
ikconsty
j
i
jkconstu
j
i
ij
k
k
k
k
y
u
u
y
u
y
u
y
≠∀=
−
≠∀=
≠∀=
≠∀=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
=
;
1
;
;
;
λ
. (2.64)
Физический смысл таких коэффициентов
λ
ij
состоит в следующем: числитель
– обычный коэффициент чувствительности
i-го выхода к изменениям j-го входа,
вычисленный в точке заданного статического режима. Для линейного МДЗ с пе-
редаточной матрицей W(
p) он совпадает со значением W
ij
(0).
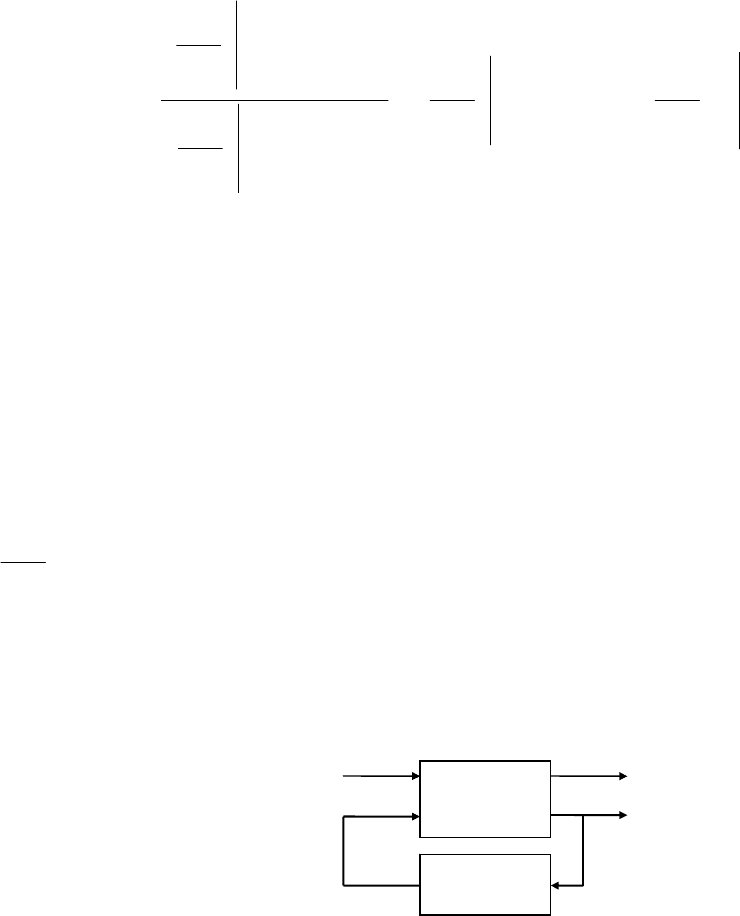
Знаменатель выражения для
λ
ij
– это аналогичный коэффициент чувствитель-
ности
i-го выхода к изменениям j-го входа, но вычисленный в предположении то-
го, что
все остальные выходы поддерживаются на постоянном (заданном) уровне
с помощью некоторого абстрактного «идеального»
регулятора (рис. 2.15).
Для линейного МОУ с
квадратной передаточной матрицей W(p) сомножитель
1−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
i
j
y
u
в формуле (2.64) представляет собой (j, i)-элемент матрицы W
–1
(0). Это
позволяет записать выражение для (
i, j)-элемента матрицы Бристоля линейного
МОУ в следующем виде:
λ
ij
= W
ij
(0)⋅[ W
–T
(0)]
ij
. (2.65)
45
Рис. 2.15. К пояснению смысла знаменателя в формуле (2.64) для λ
ij
Полученная таким образом матрица относительных коэффициентов чувстви-
тельности обладает следующими свойствами:
1)
Λ={λ
ij
} – это числовая матрица, так как ее элементы вычисляются в точке
статического режима;
2)
Λ={λ
ij
} – симметрическая матрица;
3)
∑
∑
==
i
ij
j
ij
1 ;1
λ
λ
, т.е. сумма элементов в любой строке или столбце все-
гда равна единице;
4)
если передаточная матрица многосвязного объекта управления W(p) диаго-
нальная или треугольная, то соответствующая ей матрица Бристоля будет еди-
ничной (
Λ = E).
Идеа льный
регулятор
Δy
i
Δu
j
{y
k
}=const; k≠i
{u
k
}; k≠j
МОУ
Свойство 3 легко проверяется, подстановкой вместо λ
ij
выражения (2.65) и ис-
пользованием формулы для вычисления (
i, j)-элемента обратной матрицы и фор-
мулы нахождения определителя матрицы W(0) по элементам строки или столбца.
Из определения (и смысла) меры связности следует, что наилучшей ситуацией
является близость к нулю недиагональных элементов и близость к единице диаго-
нальных элементов матрицы Бристоля. При этом взаимосвязи
между каналами
будут несущественными. В том случае, когда недиагональные элементы возрас-
тают (по модулю), а диагональные убывают, степень связности увеличивается.
Положительная связность соответствует случаю, когда все элементы λ
ij
>0.
Это означает, что в МОУ имеются однонаправленные взаимосвязи, поэтому раз-
биение на сепаратные каналы следует провести так, чтобы диагональные элемен-
ты
λ
ii
были бы возможно ближе к единице. Это достигается перестановками
строк или столбцов. При этом обмен номерами (индексами) двух выходов соот-
ветствует перестановке местами двух строк с теми же номерами, а аналогичное
действие для входов ведет к перестановке двух столбцов матрицы Бристоля.
Отрицательная связность соответствует наличию в матрице Λ отрицательных
элементов
λ
ij
, а это означает, что изменение входа u
j
в разомкнутой и (условно)
замкнутой системе будет приводить к противоположным результатам относи-
тельно управляемой переменной
y
i
. Это наиболее нежелательная для обеспечения
устойчивости МСАР ситуация, поэтому отрицательные элементы, как правило,
не должны располагаться на главной диагонали.
Матрица Бристоля является эффективным средством для назначения пар "вход
– выход" МОУ. При этом используют следующие общие правила:
1)
анализируя W(0), предварительно назначают пары (u
j
, y
i
) так, чтобы диаго-
нальные элементы были больше (по модулю) недиагональных элементов;
2)
анализируя Λ, следует выбрать пары (u
j
, y
i
) так, чтобы диагональные эле-
менты
доминировали и приближались к единице (по модулю). Если имеются от-
рицательные диагональные элементы, для эффективности управления необходи-
мо, чтобы все диагональные элементы были отрицательны.
В некоторых случаях матрицу
Λ можно использовать для отыскания незави-
симых каналов (или групп каналов) от других. Так, например, если диагональный
элемент
λ
kk
матрицы Бристоля равен единице, а остальные элементы в строке и в
столбце нулевые, то канал с номером
k можно считать изолированным (в стати-
ке) от других каналов. Это позволяет выполнить декомпозицию (разбивку) стати-
ческой модели МОУ на отдельные независимые блоки и тем самым упростить за-
дачу проектирования МСАР.
Пример. Пусть матрица Бристоля для линейного МОУ имеет вид
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
−
−
=Λ
4,104,2
010
4,204,1
.
46
Второй канал является изолированным в окрестности статического режима и
задача управления им может рассматриваться отдельно.
Отрицательные значения элементов
λ
11
и λ
33
говорят о нежелательности пар
(
u
1
,
y
1
) и (u
3
,
y
3
). Более подходящими являются пары (u
1
,
y
3
) и (u
3
,
y
1
). С целью
унификации и упорядочивания обозначений следует поменять местами первую и
третью строки у матрицы Бристоля и у передаточной матрицы, одновременно из-
менив индексы (номера) у первого и третьего выхода МОУ. После такой рекон-
фигурации матрица Бристоля примет следующий вид:
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
−
−
=Λ
4,204,1
010
4,104,2
.
♦Модификация метода Бристоля для частотной области. Аналогично (2.65),
при определении относительных коэффициентов чувствительности в статике
можно ввести понятие коэффициентов интенсивности взаимодействия каналов
МОУ в окрестности гармонического режима с частотой
ω. Для этого используют-
ся (
i, j)-элементы частотной передаточной матрицы W(jω). Элементы матрицы
Бристоля
λ
ij
при этом будут комплексными числами, модуль которых и аргумент
(фаза) зависят от частоты
ω:
λ
ij
(jω)= W
ij
(jω)[W
−T
(jω)]
ij
. (2.66)
При этом каждый элемент
λ
ij
(jω) является комплексным числом. Его модуль
определяет степень взаимодействия соответствующих входов и выходов на фик-
сированной частоте
ω, а аргумент (фаза) определяет оценку запаздывания в пере-
даче гармонического воздействия от входа к выходу. Если в некоторой области
частот |
λ
ij
(jω) |≈1, а arg λ
ij
(jω)≈0, то эта пара «вход-выход» образует в таком час-
тотном диапазоне изолированный канал, не связанный с остальными каналами
передачи воздействий.
♦Модификация метода Бристоля для переходного режима. Оценка относи-
тельных характеристик взаимодействия во временной области основана на рас-
смотрении матрицы переходных функций h(
t) устойчивого МОУ. Согласно од-
ной их методик [2], сначала определяется вспомогательная матрица G(
t):
∫
∞−=
t
dttt
0
))()(()( hhG
, (2.67)
а затем рассматриваются относительные коэффициенты взаимодействия
D
ij
(t) = G
ij
(t)[G
–T
(t)]
ij
. (2.68)
По графикам зависимостей этих элементов от времени, можно судить об ин-
тенсивности взаимодействия каналов на разных участках переходного процесса.
Например, если при
t→∞ элемент G
ii
близок к единице, то связь этого канала (в
статике) с другими каналами слабая.
♦ Использование вектора взаимодействия. Тема оценки степени взаимодейст-
вия каналов является весьма важной и актуальной, поэтому разрабатывались и
47
другие методы, не использующие идей метода Бристоля. Один из таких методов
основан на понятии
вектора взаимодействия [2].
Для многосвязного объекта управления с квадратной передаточной матрицей
W(
p) можно записать следующие соотношения:
y(
p) = W(p)f(p); f(p) = W
–1
(p)y(p) = Q(p)y(p);
f
i
(p) = Q
ii
(p)y
i
(p) +
∑
≠i
k
kik
pypQ )()(
; (2.69)
f
i
(p)/y
i
(p) = Q
ii
(p) +
)(/)()( pуpypQ
i
i
k
kik
∑
≠
= Q
ii
(p)+V
i
(p). (2.70)
Величину
V
i
(p) =
∑
∑
≠≠
=
i
k
iki
i
k
kik
pVpуpypQ )()(/)()(
называют вектором взаи-
модействия
. Для его составляющих V
ik
(p) справедлива приближенная оценка
V
ik
(p) = Q
ik
(p)(y
k
(p)/y
i
(p)) ≈ − Q
ik
(p)Q
ki
(p)/(1+Q
kk
(p)). (2.71)
Используя понятие вектора взаимодействия при
p = jω, можно ввести различ-
ные количественные характеристики (меры) взаимодействия, например
I
1
(ω) = |V
i
(jω)/Q
ii
(jω)|. (2.72)
Такие показатели взаимодействия каналов могут быть использованы в методах
структурного синтеза МСАР для сравнительной оценки различных вариантов
компенсаторов, снижающих влияние взаимодействия подсистем до требуемого
уровня в тех случаях, когда точная компенсация невозможна.
♦ Использование функций связности. При анализе устойчивости МСАР час-
тотными методами для оценки степени взаимодействия каналов регулирования в
разомкнутой МСАР рассматривают
частотные функции связности [13]:
а) частотная функция связности
по входам (по столбцам)
θ
i
(ω) =
|)(|/|)(|
ω
∑
ω
≠
jWjW
ii
ik
ki
; (2.73)
б) частотная функция связности
по выходам (по строкам)
k
i
(ω) =
|)(|/|)(|
ω
∑
ω
≠
jWjW
ii
ik
ik
. (2.74)
Эти функции характеризуют
относительную силу действия перекрестных свя-
зей в разомкнутой системе на частоте
ω по сравнению с прямыми каналами:
θ
i
(ω) − со стороны i-го входа; k
i
(ω) − на i-й выход.
• Существенное влияние перекрестных связей может быть либо проявлением
соответствующих свойств многосвязного объекта управления, либо результатом
неполного или неточного соблюдения условий автономности.
Для структурированного МОУ (после проведения соответствующей перенуме-
рации входов и выходов) сепаратным (прямым) каналам будут соответствовать
диагональные элементы передаточной матрицы W
0
(p), а перекрестным каналам
(связям) – все оставшиеся
недиагональные элементы. Обычно для МОУ рассмат-
риваются два базовых варианта его структурного представления, которые показа-
ны на рис. 2.16: а) с
прямыми и б) с обратными перекрестными связями.
48

S
d
(p)
S
m
(p)
а)
y(p)
u(p)
L
m
(p)
S
d
(p)
б)
u(p)
y(p)
W
0
(p)
W
0
(p)
Рис. 2.16. Базовые варианты структурного представления МОУ
Здесь S
d
(p) – передаточная матрица прямых каналов МОУ (диагональная), а
S
m
(p) и L
m
(p) – передаточные матрицы перекрестных связей (с нулевыми главны-
ми диагоналями). При этом для W
0
(p) будут справедливы выражения:
W
0
(p) = S
d
(p) + S
m
(p) = [E – S
d
(p) L
m
(p)]
–1
S
d
(p).
2.7. Автономное регулирование в МСАР
Принцип автономности в ТАУ состоит в динамическом разобщении каналов
регулирования. Он находит самое широкое применение в практике проектирова-
ния МСАР. При его использовании, выбором структуры и параметров регулятора
обеспечивается независимое поведение автономных каналов в одном из двух ас-
пектов [10, 13]: 1) каждый из каналов регулирования располагает собственным
набором характеристических корней (мод); 2) каждая из управляемых перемен-
ных реагирует на изменение только «собственного» задающего воздействия. На
практике понятие автономности может трактоваться и в более широком смысле,
когда рассматриваются и другие виды автономности: односторонняя, групповая,
статическая, приближенная и др.
2.7.1. Понятие, виды и условия автономности МСАР
Рассмотрим обобщенную структуру МСАР, показанную на рис. 2.17. Все осо-
бенности динамики, методов анализа и расчета такой системы управления обу-
словлены наличием перекрестных связей между каналами регулирования. Тради-
ционным источником таких связей является многосвязный объект управления
(МОУ), хотя они могут проявляться и в других функциональных звеньях управ-
ляющей части МСАР, например в измерительных или в усилительно-
преобразовательных устройствах. В отличие от МОУ, элементы управляющей
части системы (регулятора) выбираются разработчиком МСАР так, чтобы обеспе-
чить системе требуемые свойства и характеристики. Одним из таких свойств мо-
жет быть
автономность каналов регулирования.
Регулятор МОУ
y(t)
f(t)
y*(t)
2
1
e(t)
u(t)
x(t)
3
Рис. 2.17. Обобщенная структура МСАР
49
50
♦Многосвязная САР называется автономной, если в ней выполняются усло-
вия
инвариантности (независимости) управляемых переменных относительно
«чужих» задающих воздействий. Это условия
полной автономности, которые иде-
ально соответствуют цели и задаче регулирования для подсистемы исполнитель-
ного уровня РСУ. Основное достоинство автономных МСАР состоит в
динамиче-
ском разобщении
каналов регулирования, при котором каждому каналу будет со-
ответствовать свое собственное характеристическое уравнение. Вся МСАР при
этом
формально «расщепляется» на отдельные подсистемы (автономные каналы
регулирования), которые
по отношению к задающим сигналам функционируют
совершенно независимо, несмотря на наличие внутренних взаимодействий между
ними (например, в МОУ). Это позволяет существенно упростить задачу анализа и
проектирования МСАР, а также упрощает ее наладку и эксплуатацию.
Динамические свойства автономных каналов регулирования в общем случае
могут значительно отличаться от свойств соответствующих им
сепаратных кана-
лов регулирования, получаемых формальным отбрасыванием
всех перекрестных
связей в МОУ и в регуляторе. При полном совпадении этих свойств в МСАР
достигается
абсолютная автономность, а иначе − только обычная, простая ав-
тономность
. Кроме полной автономности МСАР возможны также различные ви-
ды
неполной автономности (односторонняя, групповая, статическая и др.).
Как следует из определения, необходимым и достаточным условием
полной
автономности каналов регулирования является
диагональный вид передаточной
матрицы Ф(
p) замкнутой МСАР относительно задающих воздействий:
Ф(
p) = diag{Ф
ii
(p)}; Ф
ij
(p) = 0 при i ≠ j. (2.75)
Односторонняя автономность каналов регулирования будет в том случае, ко-
гда Ф(
p) будет, например, нижней треугольной матрицей:
Ф
ij
(p) ≠0 при i ≥ j. (2.76)
Аналогичные по форме условия (2.75), (2.76), но выполняемые при
p=0 обес-
печивают автономность каналов регулирования в
статических режимах (статиче-
ская автономность). Из полной автономности всегда, как частный случай, следует
статическая автономность. Но выполнение обратного свойства не гарантируется.
Более того, статически автономная МСАР может оказаться неустойчивой.
Очевидно, что условия автономности по задающим и возмущающим воздей-
ствиям в общем случае не совпадают, т.к. передаточные матрицы по этим воз-
действиям будут отличаться друг от друга.
Для структуры
с единичной отрицательной обратной связью (ЕООС), когда
связи 1, 2 и 3 на рис. 2.21 отсутствуют, математические условия автономности
(2.75) и (2.76) можно получить для передаточной матрицы разомкнутой системы.
Пусть W
0
(p) и W
р
(p) – передаточные матрицы МОУ и регулятора соответст-
венно. Тогда передаточная матрица разомкнутой МСАР W(
p) = W
0
(p)W
р
(p).
Используя формулу замыкания для структуры с ЕООС, применим к Ф(
p) ус-
ловие автономности (2.75) , т.е. потребуем, чтобы Ф(
p) была диагональной:
Ф(
p) = [E+W(p)]
–1
W(p) = [W
–1
(p)+E]
–1
= diag {Ф
ii
(p)}.