Воронов А.А. Теория автоматического управления. Часть первая
Подождите немного. Документ загружается.

Вещественные и мнимые частотные функции системы опре-
деляются равенствами
U (со) — А (со) cos ф (со);
V (со) = А (со) sin ф (со).
Пользуясь полученными соотношениями
можно построить АФЧХ. Из (2.55) очевидно
(2.57)
(2.55)—(2.57),
L (со)
п
i— 1
И.
(2.58)
где L (со) — 20 lg А (со) и L
t
(со) = 20 lg Л^ (со) — логарифми-
ческие амплитудные частотные функции.
Из (2.56) и (2.58) вытекает следующее правило построения
J14X (ЛАЧХ и ЛФЧХ) систем, передаточные функции кото-
рых преобразованы к виду (2.54): строят ЛЧХ отдельных
звеньев и затем их графически складывают.
На основании (2.58) можно также сформулировать несколь-
ко иной, более простой порядок построения ЛАЧХ. Проил-
люстрируем это сначала на кон-
кретном примере.
Пусть W (s)=
100
(s+l)/№ х
X (10s + 1) (0,01 s
2
+0,1 s+1)].
J1 огар ифмическа я ам пл итуд-
ная частотная функция
L
(о>) =г
40—v20 lgo)—
—20 lgj/"(10o))
2
+
1
+
+20 igy-^Ti-
- 20 lg |/(
1
—
0,01 со
2
)
2
+
(0,1 со)
2
.
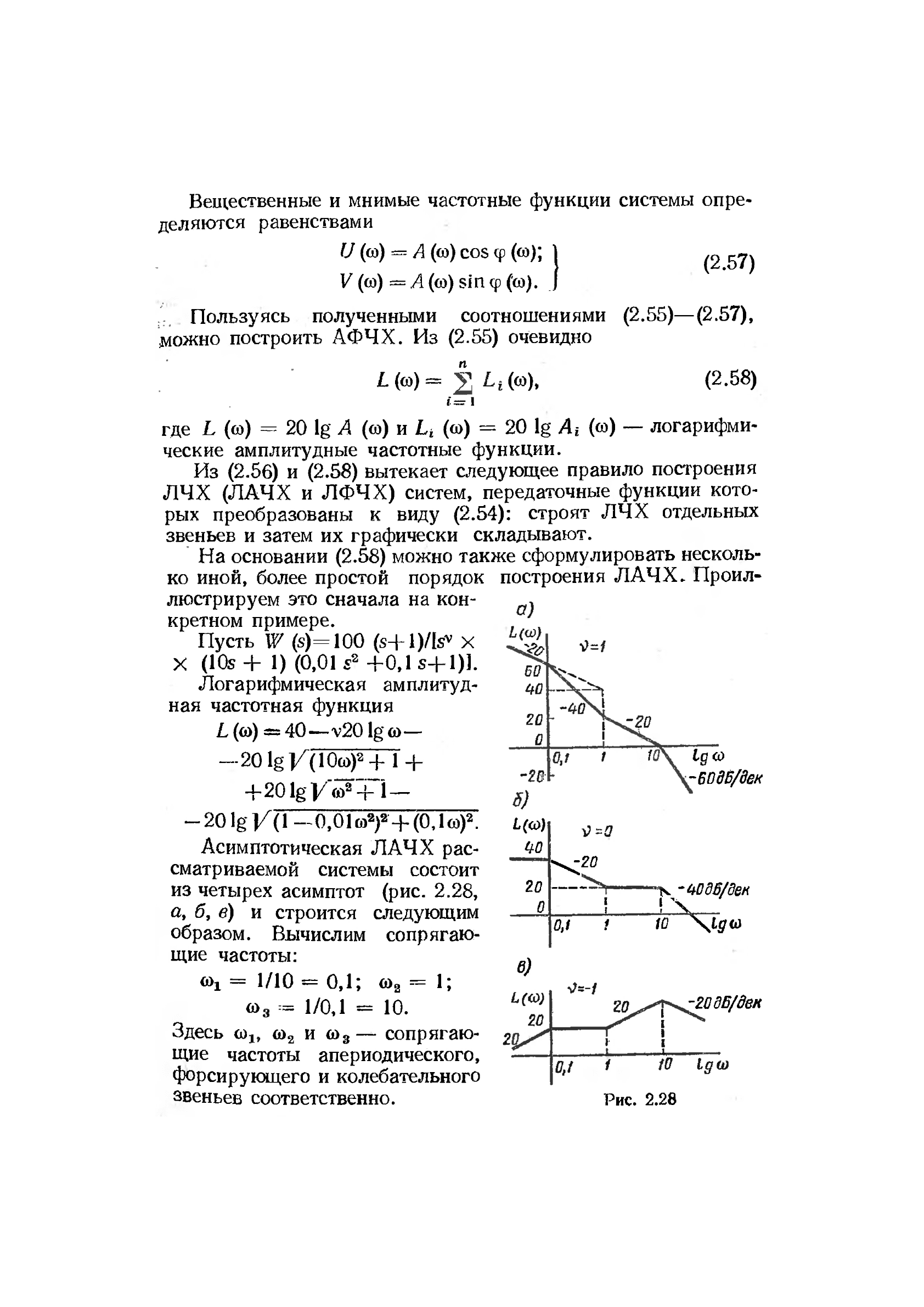
Асимптотическая ЛАЧХ рас-
сматриваемой системы состоит
из четырех асимптот (рис. 2.28,
а, б, в) и строится следующим
образом. Вычислим сопрягаю-
щие частоты:
о)! = 1/10 - 0,1; б>
2
- 1;
- 1/0,1 - 10.
lg
<о
-ШБ/дек
L(<o)
40
-^zo
20
—у<-Мд6/дек
0
I
1
!
X -
0
t
i f
10 \l gio
6)
О)
-20 дБ/дек
Здесь со
о>2 и
о) з —-
сопрягаю-
щие частоты апериодического,
форсирующего и колебательного
звеньев соответственно.
Рис. 2.28

Напомним, что при построении асимптотической ЛАЧХ эле-
ментарных звеньев при частотах, меньших сопрягающей час-
тоты, под корнем оставляют только единицу (остальными чле-
нами пренебрегают), а при частотах, больших сопрягающей
частоты, —члены с найвысшей степенью со. Поэтому в рас-у
сматриваемом примере при
о>
<; со
г
L (со) « 40 — v201gco.
*
Это уравнение первой асимптоты. Согласно этому уравне-
нию, первую асимптоту проводят через точку с координата-
ми 1 и 20 lg k с наклоном — v20 дБ/дек. Она кон-
чается на первой сопрягающей частоте.
При % ^ о < ш
2
аналогично имеем
L (со) 40 — v201g со — 201g Юсо = 20 — v 20 lgo> —
— 20 lgco.
Это уравнение второй асимптоты. Ее наклон изменяется
на — 20 дБ/дек и обусловливается апериодическим звеном.
Вторую асимптоту проводят от конца первой асимптоты до вто-
рой сопрягающей частоты согласно ее уравнению с наклоном
(— v 20—20) дБ/дек.
При 6>
2
О) < ш
3
L (со) « 20 — v201gco— 201gco + 201gco - 20 — vx
X20 Igco.
Это уравнение третьей асимптоты. Ее наклон изменяется
на 20 дБ/дек и обусловливается форсирующим звеном. Третью
асимптоту проводят от конца второй асимптоты до третьей со-
прягающей частоты с наклоном — v-20 дБ/дек.
При со > со
3
.
L (со) = 20 — v-20lgco — 40 lg
0,1 со
- 60 — v201gco —
— 401g со.
Это уравнение последней, четвертой, асимптоты. Ее наклон
изменяется по отношению к третьей асимптоты на —40 дБ/дек
и обусловливается колебательным звеном.
Теперь нетрудно сформулировать общее правило построе-
ния асимптотической ЛАЧХ системы с передаточной функци-
ей вида
1= 1
где Wi (s) — передаточные функции элементарных звеньев.
Правило построения асимптотической ЛАЧХ.
1. Вычисляют сопрягающие частоты и значение 201g&,
где k — передаточный коэффициент системы, равный произ-
п
ведению передаточных коэффициентов звеньев (k = П&
£
).
2. Строят первую асимптоту, которую проводят До первой
сопрягающей частоты через точку с координатами о) = 1 и
L — 201gfe с наклоном — v*20 дБ/дек. Здесь v равно разности
между числами интегрирующих и дифференцирующих звень-
ев.
3. Проводят вторую асимптоту от конца первой асимптоты
до второй сопрягающей частоты. Ее наклон изменяется на
20,-20, 40 или — 40 дБ/дек в зависимости от того, является
ли с&л сопрягающей частотой форсирующего, апериодическо-
го, форсирующего второго порядка или колебательного зве-
на соответственно.
4. Строят каждую последующую асимптоту аналогично
второй. Изменение наклона (I + 1)-й асимптоты зависит
от того, сопрягающей частотой какого элементарного звена
является щ.
Если какая-либо сопрягающая частота является кратной
и ее кратность равна /, т. е. имеется I одинаковых элементар-
ных звеньев,*то изменение наклона при этой частоте в I раз
больше, чем при соответствующей простой частоте.
Для колебательных звеньев с малым коэффициентом демп-
фирования <с 0,4) асимптотическая ЛАЧХ должна быть
скорректирована в окрестности сопрягающей частоты по точ-
ным формулам или с помощью кривых поправок (см. рис. 2.9, г).
§ 2.8. Многомерные стационарные линейные
системы
Многомерными системами или системами многосвязного уп-
равления называют автоматические системы управления, в ко-
торых имеется несколько (больше одной) управляемых вели-
чин. Соответственно объекты, имеющие несколько управляе-
мых величин, называют многомерными объектами или объ-
ектами многосвязного управления.
к
Примерами многомерных объектов могут быть: самолет,
у которого управляемыми величинами являются курс, углы
тангажа и крена, высота, скорость; паровой котел, в котором
регулируется температура, давление пара и другие величины.
Обычно управляемые величины называют выходами или
выходными величинами. И поэтому многомерные системы еще
определяют как автоматические системы с многомерным (век-
торным) выходом.
Многомерные системы и объекты называют линейными и
стационарными, если они описываются системой линейных
дифференциальных уравнений с постоянными коэффициента-
ми.
Уравнения многомерных стационарных линейных систем
и объектов. Пусть у
ъ
..., у
9
обозначают выходные величины,
Hi, и
т
— параметры управления или задающие воздейст-
вия и Д, f
l
— возмущающие воздействия. Уравнения
многомерных стационарных линейных систем и объектов в об-
щем случае можно записать в виде следующей системы:
Яп
(р)Уг
+ —+ «1Р
(Р)Уо
= йи (Р)н
х
+ ... +b
lm
(р) u
m
~h
+ (p)fi + ... + c
u
(p) f ,
\
l
(p) Ух
+... +
^pp (P) yp
= b
p
i(p)u
1
+ ... + b
m
(P)
u
m
-f
+ + —+ {p)fb
или в более компактной форме
р т I
2
a
u(P)yj^ 2 Ь
а
(р)и
}
+ 2 c
i}
(p)f;,
ё
=
1
р. (2.59)
/= | /=
I
/=
1
J
Здесь aij (р), Ь
и
(р), c
t
j (р) обозначают стационарные линей-
ные операторы, т. е. полиномы от оператора дифференцирова-
ния с постоянными коэффициентами.
Переходя в обоих частях (2.59) к изображениям Лапласа,
при нулевых начальных условиях получим систему алгебраи-
ческих уравнений:
р m I
2 а
и
(s)
У
}
(s)
= 2 btj
(s)
Uj (s) + 2
c
u
(*)
f
J
(
s
>.
i /-= i /= i
i = l....,p, (2-60)
где
Yj (s) = L{y
}
(t)}, U
s
(s) = L{u
}
(t)), F
}
(s) = L {/,- (0).
Для многомерных систем удобна матричная форма записи
уравнений.
Введем в рассмотрение матрицы
У
=
\
Уi~\
*
•
•
; Ш =
«и (Р)
...
Clip
(р)
-1
J
. «р! (Р)
••• «рр (р)
J 1
L«m.
В(р)
=
Ьц
(/>)...
ь
1т
{р)
\\ {р)...Ь
рт
(р)
f =
; с м-
^11 (/>)•••
^п(р)
^piH-.^PHp).
С их помощью (2.59) в матричной форме будет
A(p)y = B(p)u + C(p)f.
(2.61
Точно так же можно записать (2.61) в изображениях Лап-
ласа в матричной форме:
A (s)
Y (s)
- В (s) U (s) + С (s) F (s).
Здесь
(2.62)
«п («)... aip(s)
A (s) =
J
|; Y (s)
«pi (s)...«pp(s)
b
n
(s)...b
lm
(s)
]
у As)
IVp (si
(s) =
bf>\
(s)... bp
m
(s)
1 'Л (s) c
n
(s)... c
u
(s)
<s) = i
; с (s) = ; F(S) =
•
•
L^m(s).
Cpl (s)...
Cp/
(s) _
В (2.61), после умножения и сложения матриц, в правой и
левой частях получатся матрицы-столбцы. Приравняв их со-
ответственные элементы, получим систему уравнений (2.59).
Аналогично, выполнив указанные операции над матрицами
и приравняв соответственные элементы матриц левой и правой
Частей матричного уравнения (2.62), получим систему (2.60).
Пример 2.6. Пусть исходная система дифференциальных урав-
нений имеет вид
(ао P
+
o
t
) у
L
+
о
2
У2
= К №
1
+
b
v
и
2
\
аз
У1+(^р +
а
ъ
) Уг
= Ь
2
и
2
.
В матричной форме, как нетрудно проверить, эта система записывается
в виде
А
{р)
у = В (/?) и,
где
А {р)
-I
а
0
Р
+ а
2
аз а&р+с1ь
} '«-[*.' л]
Г: а
Передаточная матрица. Для описания многомерных систем
и объектов, как и в случае одномерных систем, можно ис-
пользовать передаточные функции. Передаточной функцией
W/J. (s) (в изображениях Лапласа) по /-му параметру управле-
ния и i-му выходу называют отношение изображения Лапласа
выходной величины у
г
к изображению входной величины
Uj
при
нулевых начальных условиях. По определению,
W
u
ij
{s)^Y
i
(s)/U
j
(s). (2.63)
Эту передаточную функцию можно вычислить следующим об-
разом. В системе (2.60) приравниваем нулю изображения всех
возмущающих воздействий и параметров управления, кроме
Uj (s). Из полученной системы алгебраических уравнений на-
ходим решение Yi (s), а затем, разделив его на Uj (s), получим
искомую передаточную функцию.
Аналогично определяют передаточную функцию w\§ (s)
по /-му возмущающему воздействию и i-му выходу:
(
s
)
(2.64)
В случае многомерных систем (объектов) для ее полного
описания необходимо иметь р-т передаточных функций по уп-
равлению и fj-/ передаточных функций по возмущению. Эти
передаточные функции записывают в виде матриц:
W"
(s)
=
Wf (s) -
w«
t
(s)...
Wlm (S)'
Wlv
(s)...
W
u
pm
(s)J'
'
Wf
т
i
1
(s)...
W
'u
(s) 1
•
wU (s)...
<i
(s)
J
(2.65)
(2.66)
Матрицы (2.65) и (2.66) называют матрицами передаточ-
ных функций или
передаточными
матрицами: матрица (2.65)—
по управлению,, а матрица (2.66) — по возмущению.
Передаточные матрицы дают полное описание многомерных
систем (объектов) при нулевых начальных условиях. С их по-
мощью уравнения (2.60) или (2.62) многомерной системы в изо-
бражениях Лапласа можно записать в следующем виде:
Y (s)
- W"
(s)
U
(s)
-h Wf
(s)
F
(s).
(2.67)
Действительно, согласно определению (2.63), когда изоб-
ражения всех возмущающих воздействий и параметров уп-
равления, кроме Uj (s), равны нулю, имеем
Y
i
(s)=^Wl(s)U
I
(s)
9
1
=
1
р; / = га.
Аналогично, из (2.64)
Y
i
(s) = W
f
i/
(s) Fj (s), t-1 p;/«l /.
В общем случае, когда все параметры управления и возмущаю-
щие воздействия отличны от нуля, используя принцип супер-
позиции, можем записать
т I
Yi(s)=: 2 П (№(*> + S
<'
=
1
р. (2.68)
/=1 /=1
Очевидно, (2.67) является матричной формой записи получен-
ной системы (2.68).
Рассмотрим способы вычисления передаточных матриц.
Первый способ, указанный выше, основан на использовании
определений (2.63) и (2.64). Второй способ основан на соотно-
шениях
W"
(s)
= A
1
(s) В
(s); W
(s)
- А-
1
($) С (s).
(2.69)
Эти соотношения получают следующим образом. Умножим
слева обе части матричного уравнения (2.62)
A
(s) Y (s)
-
В (s) U (s)
+
С
(s)F(s)
на обратную матрицу A*"
1
(s). Тогда получим
Y
(s) « A-
1
(s) В
(s)
U (s) 4- A-
1
(s) С
($)
F (s).
Приравнивая правую часть полученного уравнения к правой
части равносильного ему уравнения (2.67), получим соотноше-
ния (2.69).
Как известно из курса высшей алгебры, обратная матрица
Ли (s)... i4i
p
(s)
nr
A -
l
(s)=
1
|A(s)f
A
pl
(s)... App(sy
Здесь A
iS
(s) — алгебраическое дополнение элемента а
и
(s).
Знак Т обозначает операцию транспонирования.
Пример 2.7. Пусть система (объект) описывается уравнениями
Перейдем к изображениям Лапласа (при нулевых начальных условиях)
(s* + s) У
х
(s)
+
У 2
I
s
) = Vi
(s)
+ F,
(s);
(s + 1) Y
x
(s) + sY
2
(S) - U
2
(s) + F
2
(s).
В Матричной форме эта система записывается так:
A
(s)
Y (s)
—
В
(s)
U (s) +
С
(s) F (s),
где
Ts
2
+ s 11
п
Г! 0] П 01
A(S)
= ls+I J
5 B(S) =
|o .J
: C<S)
= lo ,]•
Найдем обратную матрицу A^
1
(s):
I A
(s)
I — (s
+ 1) (s
2
—
1); A
u
=s; A,= —(s+1);
(s+ 1) (s
2
—
1) L —
*
+ s \
-—
L
— f
s
I-
Так как В (s) и С (s) являются единичными матрицами, то
(s)-A-i(s).
Весовые или импульсные переходные матрицы. Пусть уп-
равляющий параметр Uj = б (/), а остальные управляющие
параметры и возмущающие воздействия равны нулю. При этом
решение (2.59) многомерной системы при нулевых начальных
условиях обозначим
w
u
\j
(t), (0,..., ^р/ (0- Эти функции
называют весовыми или импульсными переходными функция-
ми. Функция (£) описывает реакцию системы на i-u вы-
ходе при действии в точке приложения у-го параметра управле-
ния единичного импульса и называется импульсной переходной
или
весовой
функцией по /-му параметру управления и i-му вы-
ходу. Матрицу
[
Wn (/)... wtmi't)
,
Wpi
(t)...W%
m
(t)
составленную из весовых функций по управлению, называют
импульсной переходной или
весовой
матрицей по управлению.
Аналогично определяют импульсную переходную или весовую
матрицу по возмущению:
wf (t) =
r
w
f
u(t)... w\t(t)
_
w
pl (*)••• Wptit)
Здесь w[j (t)
t
...,
Wpj
(t) — решение (2.59) многомерной систе-
мы, когда fj = б (t)
f
а все остальные возмущающие воздейст-
вия и параметры управления равны нулю.
Весовые матрицы, как и передаточные матрицы, дают пол-
ное описание многомерной системы (объекта).
Установим связь между весовыми и передаточными матри-
цами.
Согласно определению (2.63) передаточной функций Wlj
(s)
9
уi
(«)
= W
u
ti
(s)
Uj (s),
£
= 1,..., p. (2.70)
Так как (s) = L{6 (t)} = 1 и y
t
(/) — w
u
if
(t) при uj =
= 6 (?) и остальных входных воздействиях, равных нулю, то
из уравнения (2.70)
оо
B7?,(s) = LK(0)=f w"/(t)e~
st
dt, (2.71)
о
• I I
I 1,...,
Pj
J
1 5 . .
. ,
TTb.
Аналогично можно показать, что
оо
\H/(e)=LM/(0i==J w
f
n(t)e~
st
dt
t
/=
1
р,
о
(2.72)
Таким образом, передаточные функции (элементы передаточ-
ных матриц) равны изображению Лапласа от весовых функций
(элементов весовых матриц).
В матричной форме (2.71) и (2.72) принимают вид
оо
W"
(s)
- L {w* (t)\ » J w« (t) e~
st
dt;
0
со
Wf
(s)
L {vtf (0) = J
w?
(0e~
st
dt.
0
По определению, интеграл от матрицы равен матрице интегра-
лов от ее элементов.
Запишем формулу для определения выходных величин по
весовым матрицам при произвольных входных воздействиях.
Учитывая, что оригиналами от передаточных функций явля-
ются весовые функции, и используя теорему о свертке, из
(2.68)
т I -
Yi(s) = 2 ^
U
ii(s)Uj(s)+ 2 W
f
if
(s)F
i
(s),
/==
i /= i
переходя к оригиналам, получим
т оо
Уг
(0= X f
V>%
(t - Т)
Uj
(Т) dx +
I'
/=
1 О
l oo
+ S f T)/>(x)dT,
£
= 1,...., p-
/-1 »
Эта система в матричной форме записывается как
I
оо оо
У(0= f w
w
(£—т)и(т)dT+ Г w'(/—T)f(T)dT.
Таким образом, связь между выходными и входными величи-
нами с помощью весовых матриц записывается так же, как и в
одномерном случае.
Запись дифференциальных уравнений в нормальной форме
Коши. При рассмотрении многих вопросов удобно, если урав-
нения одномерных и многомерных систем записаны в виде нор-
мальной системы. Нормальной системой или системой в нор-
мальной форме Коши называют систему дифференциальных
уравнений первого порядка, разрешенных относительно про-
изводных. В частности, нормальной системой линейных диф-
ференциальных уравнений называют систему
п т I
*»•= 2 ацхнь 2
ь
»
u
j+ 2
,ея1
(
2
-
73
>
/=
1
/=i /=1
В матричной форме она записывается как
х = Ах
-Ь
Bu + Cf, (2.74)