Воронов А.А. Теория автоматического управления. Часть первая
Подождите немного. Документ загружается.


или
(Т
п
р+ 1К + Р<Р = (2.126}
'я
Г
я
где Г
я
= LJr'
n
— электрическая постоянная времени цепи
якоря.
На основе законов механики можно записать уравнение
для моментов
j£± — м
е
dt
2 вр с
или
Jp
2,
<р =•
М
вр
— М
с
, (2 А 27}
где J — момент инерции вала двигателя (с учетом нагрузки);
Л1
вр
— вращающий момент; М
с
— момент сопротивления.
Вращающий момент пропорционален току якоря:
(2.128)
Значение постоянной с
4
, как и с
3
, зависит от тока возбужде-
ния и конструкции двигателя.
Исключив из (2.126), (2.127) и (2.128) момент М
вР
и
ток /я, получим
(Т
я
р +1) (р
2
ф
+ — м
с
)+-Ё-
w
- 4-1.
V с
4
С
4
j я
г
я
у
Это уравнение можно преобразовать к виду
(Т
я
Т
вм
р
г
+ Т
ш
р 4-
1) РФ
= w
y
—А
Д
2
(Т
пР
+1)М„ (2.129)
г
Д
е
т„ = Jr'Jc
3
c
4
— электромеханическая постоянная вре-
мени; kfr — с
3
и &
д2
= Гя/с
3
с
4
— передаточные коэффициен-
ты.
В изображениях Лапласа уравнение двигателя принимает
вид:
(Тя Пм
?
2
+ 4- 1) 5Ф
(S)
= - (Г
я
5 + 1) M
c
(s),
(2.130)
где £/
у
(s) -L {u
y
}; М
с
(s) = L {М}
с
.
Передаточные функции двигателя имеют вид:
по управляющему воздействию
и
' (Т
я
Т
вм
р* + Тъ
М
р+1)р
w
u
(S) =
(Т
я
т
ш
S
2
4-
Т
&ы
S+
1)
s '

по возмущению (моменту сопротивления М
с
)
Г
м
(р)
^яР+В ;
Тем Р
2
~\~Там
Р+
1) Р
W
M
(s) —
- g ^
2(7
'"
s+I)
(Л,
*
8M
s
+
S
+
I )
S
Структурная схема приведена на рис. 2.31, в, откуда видно,
что математическая модель двигателя может быть представ-
лена: по возмущению — в виде последовательного соедине-
ния форсирующего, колебательного (или двух апериодиче-
ских, если Г
0М
С 2УТ
Я
Т
9М
) и интегрирующего звеньев, а по
управляющему воздействию — колебательного (или двух апе-
риодических, если Т
зм
< 2"|/
г
7
,
я
7\
ш
) и интегрирующего звень-
ев.
Усилитель, сравнивающее звено, делитель напряжения.
Эти элементы -описываются уравнениями
u
y
= k
y
e\ —ц
д
;
—
k
u
u
rt
(2.131)
где k
y
— коэффициент усиления усилителя; k
д
— «коэффи-
циент деления» делителя.
Линеаризованное уравнение генератора связывает отклоне-
ние Ди
т
с внешними воздействиями ф и/, Поэтому небходи-
мо преобразовать систему уравнений (2.131), так, чтобы она
зависела от отклонения Ди
г
(а не от и
г
),
Запишем последние два уравнения системы (2.131) следу-
щим образом:
е=
Ион
+ Д^о— (^д.н +
Д
"д);
и
л-н + А^д =
("г-н
+ (2.132)
где и
0нУ
«д.
н
— номинальные значения задающего воздействия
и напряжения делителя, определяемые равенствами
«д.н = К «он = "
я
.н- (2.133)
Уравнения (2.132) с учетом (2.133) можно записать так:
Д «
д
= й
д
Д«
г
; е ~ Д«
0
—
В изображениях Лапласа уравнения усилителя, сравниваю-
щего устройства и делителя напряжения принимают следую-
щий вид:
U
y
(s) = k
y
E(s); E(s)=U
0
(s)-U
R
(sy
f
V
v
(s)
y
где E(s)=L {e}; U
0
(s) ==
L 1/
д
(s)
= L {Д«
д
}.

Рис. 2.32
Передаточные функции усилителя W
y
и делителя W
n
имеют
вид
Эти звенья являются пропорциональными. Сравнивающее
звено имеет два входа и описывается двумя передаточными
функциями: передаточной функцией по входу, куда подает-
ся уменьшаемое,
W
cl
(p) - W
cl
(s) = 1,
и передаточной функцией по входу, куда подается вычитае-
мое,
(р) «
U?
c2
(s) = I.
Уравнение и передаточные функции системы. На рис. 2.32
приведена структурная схема САР напряжения генератора, со-
ставленная по полученным уравнениям и передаточным функ-
циям отдельных элементов. Используя правило нахождения
передаточной функции одноконтурных систем, определим ее
передаточные функции.
Передаточная функция разомкнутой системы
W - ,
(т
я
где k = к
у
к
д1
к
г1
к
и
— передаточный коэффициент разомкну-
той системы.
Передаточные функции прямой цепи:
по задающему воздействию Au
Q
W
nu
= по моменту
сопротивления М
с
ОД/ _
&Д2 ^П
П
'
М
(Уя Т
ам
* + s+ 1) (Г
в
s+1) s '
по возмущению / W
u}
= /г
г
.
2
.
Для передаточных функций замкнутой системы (относительно
выхода Аи
т
) имеем: по задающему воздействию Аи
0
W
uu
- W
n
J(
1
+ W) = — Ь
e
«о sr + a
v
s
3
+ G
2
S
2
+ A
8
s+ C
4
где k
u
^kjk
д
;
a
Q
= T
H
T
SM
T
B
; a
1=
= (Т
я
-\- Г
й
) Г
эм
;
а2
= Г
эм
+ Г
в
; c
3
=l; =
по моменту сопротивления Л1
с
«^„М
= W
n
.J(\ + W)- '
u S+b
J —-,
а
0
s
1
щ s
3
а
2
sr+a
s
s-j- a
4
где fe
0
— Л
д2
k
ri
Т
я
\ Ь
г
= fe
rl
; по возмущению f
k
v2
(a
0
s
3
+ c
2
s
2
+ «з s)
flo +
«1 S
3
+
«2 S
2
+«3
Уравнение системы в символической форме имеет вид
hu^W
uu
Au
0
+W
UM
M
c
-{-W
uf
f,
или
(а
0
s
4
+ s
3
+ а
2
s
2
-f а
3
s + а
4
) = k
u
—
— (b
0
s +
Ь
г
)
М
с
-f k
r2
(а
0
s
4
+ а
г
s
3
+ s
2
-f a
s
s) f.
|Л
Об обозначениях передаточных функций. Выше использо-
вались два обозначения для передаточных функций: W (р)
и W (s). Первое указывает на то, что передаточная функция
рассматривается как некоторый оператор, осуществляющий
преобразования входной величины и (t) в выходную х (t). Это
записывается в виде соотношения
x = W(p)u. (2.134)
Для вычисления х по заданным и и W (р) требуется решать
дифференциальное уравнение, т. е. достаточно простой рас-
шифровки W (р), позволяющей перевести W (р) на язык алго-
ритмов, нет, и (2.1.34) следует рассматривать скорее как сим-
волическую запись дифференциального уравнения. Второе
обозначение W (s), полученное из изображений Лапласа X (s) и
U (s) для переменных х (t) и и (t), указывает на то, что W (s)
рассматривается как обычная функция комплексной перемен-
ной s. В этом случае можно записать
X(s) = W(s)U(s) (2.135)
с оговоркой, что это соотношение справедливо для нулевых на-
чальных условий. В этом случае W (s) используется, напри-
мер, для вычисления частотных характеристик W (/со).
Двойственность происхождения функций №(s) и W (р)
привела в литературе и к двойственности в обозначениях у
разных авторов. Мы в дальнейшем будем использовать, как
правило, обозначение W (s) для передаточных функций или
d (s) — 0 для характеристических уравнений, сохраняя обо-
значения W (р) для тех случаев, когда W(p) явно рассматри-
вается как оператор, а не как комплексная алгебраическая
функция, а также тогда, когда W (s) не совпадает с W (/?), на-
пример для систем с переменными параметрами. В последнем
случае часто в число аргументов функции W будет наряду с опе-
ратором р вводиться и параметр, от которого она зависит, нап-
ример W (р, t).
Глава 3
УСТОЙЧИВОСТЬ
ЛИНЕЙНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
§3.1. Понятие устойчивости
На любую автоматическую систему
всегда действуют различные внешние
возмущения, которые могут нарушить ее
нормальную работу. Правильно спро-
ектированная система должна устойчи-
во работать при всех внешних возму-
щениях.
В простейшем случае понятие устой-
чивости системы связано со способно-
стью ее возвращаться (с определенной
точностью) в состояние равновесия по-
сле исчезновения внешних сил, кото-
рые вывели ее из этого состояния. Если
система неустойчива, то она не возвра-
щается в состояние равновесия, из кото-
рого ее вывели, а либо удаляется от
него, либо совершает вокруг него недо-
пустимо большие колебания.
Наблюдения показывают, что некото-
рые положения равновесия системы ус-
тойчивы к небольшим возмущениям, а
другие принципиально возможные рав-
новесные положения практически не мо-
гут быть реализованы.
Наглядно устойчивость равновесия
представлена на рис. 3.1, где изображен
шар, расположенный в некотором уг-
лублении (рис. 3.1, а), на некоторой
выпуклой поверхности (рис. 3.1, б), на
плоскости (рис. 3.1, в).
Положение равновесия шара харак-
1еризуется точкой А
0
. В случае, изобра-
женном на рис. 3.1, а, при всяком откло-
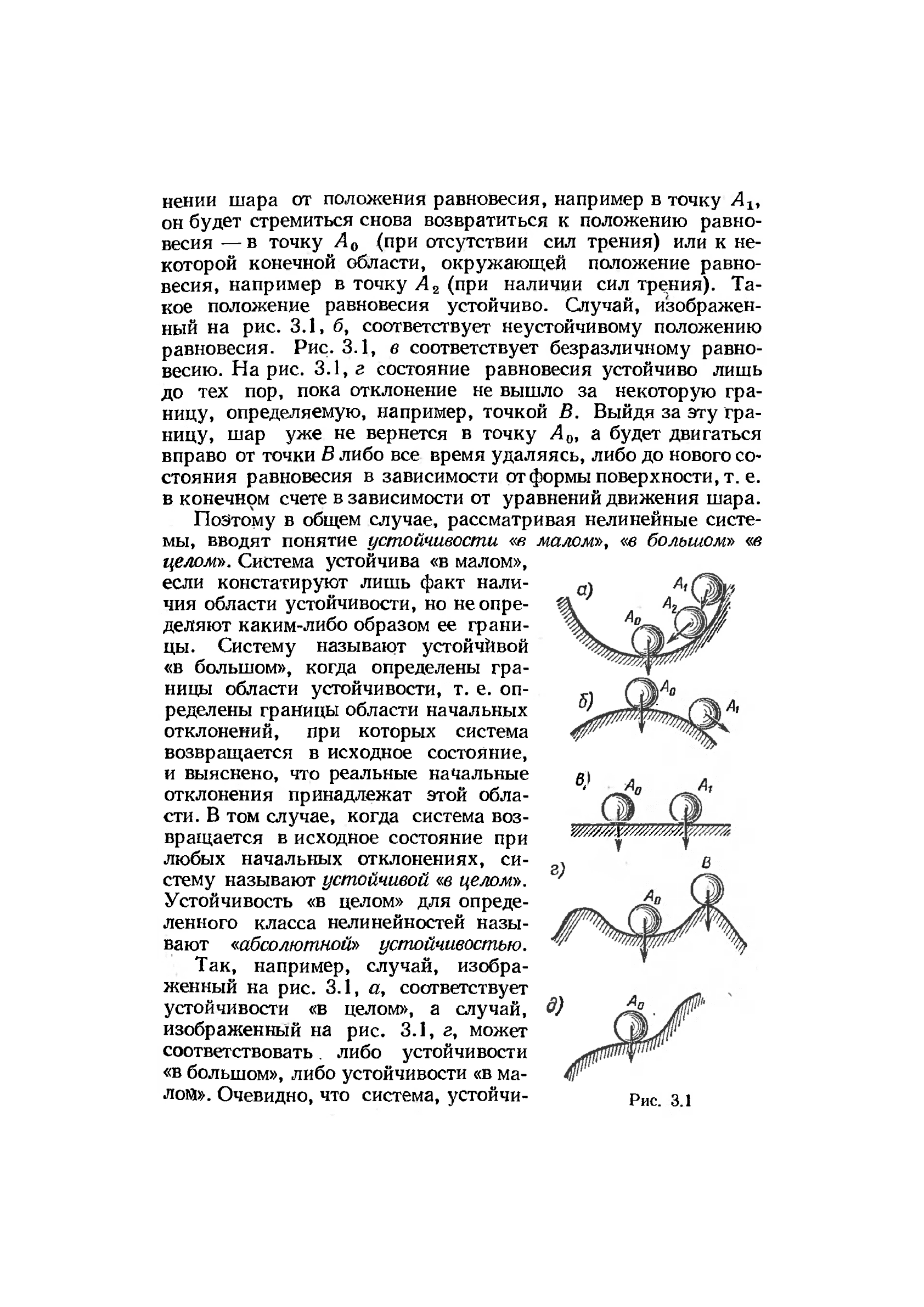
нении шара от положения равновесия, например в точку А
1У
он будет стремиться снова возвратиться к положению равно-
весия — в точку Л о (при отсутствии сил трения) или к не-
которой конечной области, окружающей положение равно-
весия, например в точку Л
2
(при наличии сил трения). Та-
кое положение равновесия устойчиво. Случай, изображен-
ный на рис. 3.1, б, соответствует неустойчивому положению
равновесия. Рис. 3.1, в соответствует безразличному равно-
весию. На рис. 3.1, г состояние равновесия устойчиво лишь
до тех пор, пока отклонение не вышло за некоторую гра-
ницу, определяемую, например, точкой В. Выйдя за эту гра-
ницу, шар уже не вернется в точку Л
0
, а будет двигаться
вправо от точки В либо все время удаляясь, либо до нового со-
стояния равновесия в зависимости от формы поверхности, т. е.
в конечном счете в зависимости от уравнений движения шара.
Поэтому в общем случае, рассматривая нелинейные систе-
мы, вводят понятие устойчивости «в малом», «е большом» «в
целом». Система устойчива «в малом»,
если констатируют лишь факт нали-
чия области устойчивости, но не опре-
деляют каким-либо образом ее грани-
цы. Систему называют устойчйвой
«в большом», когда определены гра-
ницы области устойчивости, т. е. оп-
ределены границы области начальных
отклонений, при которых система
возвращается в исходное состояние,
и выяснено, что реальные начальные
отклонения принадлежат этой обла-
сти. В том случае, когда система воз-
вращается в исходное состояние при
любых начальных отклонениях, си-
стему называют устойчивой «в целом».
Устойчивость «в целом» для опреде-
ленного класса нелинейностей назы-
вают «абсолютной» устойчивостью.
Так, например, случай, изобра-
женный на рис. 3.1, а, соответствует
устойчивости «в целом», а случай,
изображенный на рис. 3.1, г, может
соответствовать. либо устойчивости
«в большом», либо устойчивости «в ма-
лой». Очевидно, что система, устойчи- р
ис
31
в)
шт шшя,
вая «в целом», будет устойчива «в большом» и «в малом»; систе-
ма, устойчивая «в большом», будет устойчива и «в малом».
На рис. 3.1, д изображено еще одно принципиально возмож-
ное для нелинейных систем состояние равновесия, которое на-
зывают полу устойчивым.
Для того чтобы дать определение устойчивости равновесия,
вводят понятие о невозмущенном состоянии равновесия, соот-
ветствующем состоянию покоя в точке А
0
на рис. 3.1, а, и
возмущенном состоянии, соответствующем, например, точке
А
1У
в которую внешняя сила привела шар и затем прекратила
свое действие. Система будет устойчивой, если из возмущенного
состояния она перейдет в некоторую заданную область, окру-
жающую невозмущенное состояние равновесия.
В рассмотренном выше примере с шаром вопрос об устой-
чивости решается довольно просто. Однако следует заметить,
что в общем случае далеко не всегда ясно, при каких усло-
виях равновесное положение системы будет устойчивым.
Понятие устойчивости можно распространить и на более об-
щий случай, когда в качестве невозмущенного состояния рас-
сматривают не положение равновесия системы, а ее движение,
например движения системы по некоторой наперед заданной
траектории.
Допустим, что заданное движение системы при отсутствии
возмущений должно определяться некоторым законом измене-
ния независимых координат у\ (г), у\
(£),
у*
п
(t). По анало-
гии со случаем равновесия положения, заданное движение
называют невозмущенным движением. Внешние возмущения,
действующие на систему, вызовут отклонение действительного
движения системы от заданного. Действительное движение си-
стемы называют возмущенным движением. Пусть действитель-
ное движение системы определяется независимыми координа-
тами у
г
(0, у2 (О*
Уп
(О- В общем случае у
г
(t) фу\ (t),
У2 (t) Ф Уг (0, Уп (t) Ф Уп (t).
Заданное^невозмущенное движение будет устойчивым, ее-
ли после приложения внешних сил (возмущений), которые за-
тем снимают, возмущенное движение по истечении некоторо-
го времени войдет в заданную область Iу\ (0 — yl (01 ^
где е
г
- =-const — заданные величины, i = 1,2,..., п.
Чтобы проиллюстрировать сказанное, предположим, что
невозмущенное движение происходит по траектории А, а воз-
мущенное движение происходит по траектории Б (рис. 3.2, а).
Возьмем на этих траекториях две произвольные точки N
A
и
N
B
, отвечающие одному и тому же моменту времени t. При
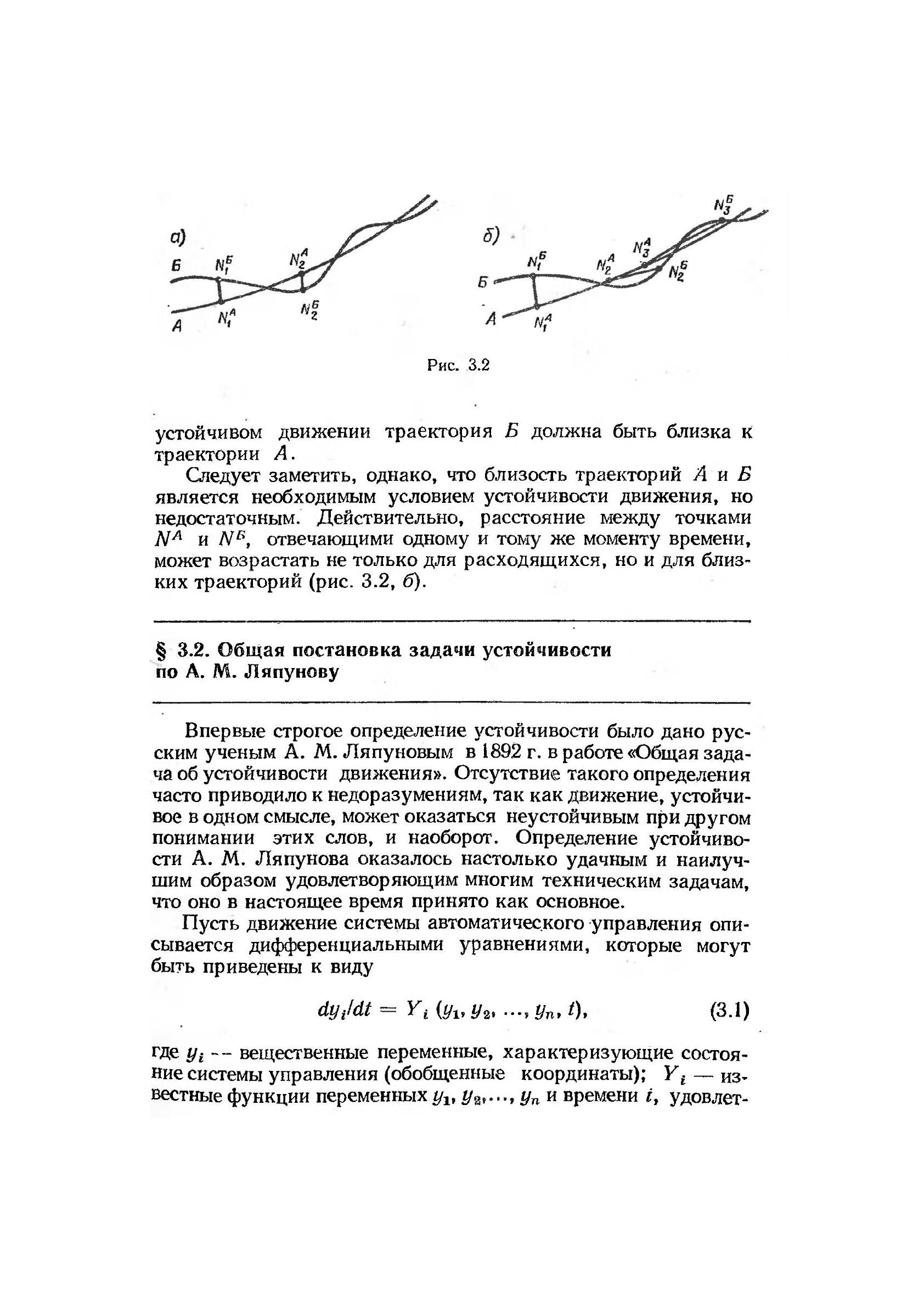
Рис. 3.2
устойчивом движении траектория Б должна быть близка к
траектории А.
Следует заметить, однако, что близость траекторий А и Б
является необходимым условием устойчивости движения, но
недостаточным. Действительно, расстояние между точками
N
A
и N
r
\ отвечающими одному и тому же моменту времени,
может возрастать не только для расходящихся, но и для близ-
ких траекторий (рис. 3.2, б).
§ 3.2. Общая постановка задачи устойчивости
по Д. М. Ляпунову
Впервые строгое определение устойчивости было дано рус-
ским ученым А. М. Ляпуновым в 1892 г. в работе «Общая зада-
ча об устойчивости движения». Отсутствие такого определения
часто приводило к недоразумениям, так как движение, устойчи-
вое в одном смысле, может оказаться неустойчивым при другом
понимании этих слов, и наоборот. Определение устойчиво-
сти А. М. Ляпунова оказалось настолько удачным и наилуч-
шим образом удовлетворяющим многим техническим задачам,
что оно в настоящее время принято как основное.
Пусть движение системы автоматического управления опи-
сывается дифференциальными уравнениями, которые могут
быть приведены к виду
dyjdt = Y
t
{y
lf
y
2i
y
n
, t), (3.1)
где уi вещественные переменные, характеризующие состоя-
ние системы управления (обобщенные координаты); Y
t
— из-
вестные функции переменных у
19
уу
п
и времени удовлет-

воряющие условиям существования и единственности реше-
ния.
" Исходное состояние системы при t — t
0
однозначно опре-
деляется начальными значениями переменных у
ь
которые
обозначим y
Wi
у2,01
^/no-
Каждой совокупности начальных значений у
10
,
0
,...,
у
т
соответствует единственное решение (3.1) для всех t > t
0
Уг ™ Уь(Ую» У•
••»
У.по* t). (3.2)
Решение (3.2) описывает какое-либо движение системы, оп-
ределяемое исходным состоянием.
Некоторое вполне определенное движение системы, подле-
жащее исследованию на устойчивость, называют невозмущен-
ным движением.
Заметим, что выбор невозмущенного движения является
произвольным. Это может быть любое возможное движение
системы, как установившееся, так и неустановившееся. До-
пустим, что в качестве невозмущенного движения выбрано та -
кое, которое описывается заданными функциями времени
Уг у\ (0; у г=Ж0;
Уп
=
у*
п
(0- (3.3)
Предположим, что функции (£) являются частным ре-
шением дифференциальных уравнений (3.1), т. е.
dyt (t)fdt - frf, yh */*, 0, (3.4)
удовлетворяющим начальным условиям при t ~ t
0
Ух =У\ {U)\ У2 =
У2(*оУ>
Уп —Уп (^о)- (3 5)
В частном случае, когда параметры системы не изменяют-
ся со временем и функции Y
г
не зависят явно от U движения
(3.3) являются установившимися. Им отвечают решения
у\ = const, (3.6)
служащие корнями уравнений
Уг {Уъ У2> Уп) = 0. (3.7)
Изменим условия (3.5), дав начальным значениям перемен-
ных у
и
*/п небольшие по модулю приращения е
х
, е
2
,...,
е
п
, т. е. пусть при t = t
0
Ух
=
У\
(Q +
Уг
=
Уг
ih) + е
2
; •• ;
Уп
= ^ (*
0
) f «п- (3.8)
Движение системы, отвечающее измененным начальным усло-
виям '(3.8), называют возмущенным движением. Другими ело-