Никитин А.А. Управление техническими системами
Подождите немного. Документ загружается.


Федеральное агентство по образованию
Федеральное государственное образовательное учреждение
высшего профессионального образования
«Сибирский федеральный университет»
А. А. Никитин
УПРАВЛЕНИЕ ТЕХНИЧЕСКИМИ СИСТЕМАМИ
для подготовки бакалавров по направлению 150800
«Гидравлическая, вакуумная и компрессорная техника»
Красноярск 2007

УДК 62-82+681.523.4(07)
Н62
Никитин А. А.
Н62 Управление техническими системами: Учеб. пособие / А. А. Никитин.
Красноярск: СФУ, 2007. 145 с.
Изложены основы управления техническими системами. В качестве
примеров рассмотрены гидравлические системы автоматического регулиро-
вания, электрогидравлические усилители и гидроприводы.
Для подготовки бакалавров по направлению 150800 «Гидравлическая,
вакуумная и компрессорная техника». Может быть полезно студентам дру-
гих специальностей.
© СФУ, 2007
© А. А. Никитин

ПРЕДИСЛОВИЕ
В большинстве областей современной техники применяется управление и ре-
гулирование. С развитием и совершенствованием машин, аппаратов, станков и
других устройств усложнились многие процессы управления. Это требует под-
готовки инженеров, хорошо понимающих принципы действия систем управ-
ления и регулирования и методы их проектирования.
Цель изучения дисциплины “Управление техническими системами” – приоб-
ретение знаний в области расчетов и исследований систем автоматического
управления различной сложности.
Обеспечение устойчивости и качества процесса управления объектами раз-
личного назначения требует ещё на этапе проектирования проведение анализа
поведения системы автоматического регулирования методами математическо-
го моделирования.
Предметом изучения данной дисциплины являются методы расчета и исследо-
ваний линейных, нелинейных и импульсных систем автоматического управле-
ния и регулирования.
Дисциплина “Управление техническими системами ” – одна из основных про-
филирующих при подготовке бакалавров по направлению 150800. На этой
дисциплине базируются такие специальные дисциплины, как “Гидравлический
привод и средства автоматики”, “Пневматический привод и средства автома-
тики”, “Динамика и регулирование гидро- и пневмосистем”.
В первой главе учебного пособия приведены основные понятия и виды систем
автоматического регулирования.
Во второй главе дана классификация систем автоматического регулирования.
В третьей главе рассмотрены основные законы регулирования.
Четвертая глава посвящена математическому описанию линейных непрерыв-
ных систем.
В пятой главе рассмотрены уравнения статики и динамики.
В шестой главе даны характеристики систем и звеньев.
В седьмой главе приведены типовые звенья и их характеристики.
Восьмая глава посвящена структурным схемам.
В девятой главе освещены вопросы устойчивости линейных систем.
Десятая глава посвящена качеству регулирования, рассмотрению вопросов
точности в установившихся режимах.
В одиннадцатой главе приведены показатели качества переходных процессов.
Двенадцатая глава посвящена корректированию динамических свойств линей-
ных систем.

В тринадцатой главе рассмотрены нелинейные звенья.
В четырнадцатой главе освещены вопросы устойчивости нелинейных систем и
рассмотрены периодические процессы, возникающие в них.
В пятнадцатой главе приведены основы теории дискретных и цифровых сис-
тем.
В шестнадцатой главе даны основные понятия оптимального управления.
В первую очередь учебное пособие адресовано студентам, обучающимся по
специальности “Гидравлические машины, гидроприводы и гидропневмоавто-
матика”, но может быть использовано студентами других специальностей,
изучающих применение гидрофицированных машин и механизмов.
Все замечания и пожелания по улучшению учебного пособия автор с благо-
дарностью примет. Их можно выслать по адресу: 660074, г. Красноярск, ул.
Киренского, 26, СФУ, кафедра “Гидропривод и гидропневмоавтоматика”, тел.
(8-3912) 49-73-60, E-mail: mliaa@mail.ru.

ВВЕДЕНИЕ
В задачах управления широко используется понятие система. Система
есть совокупность объектов или элементов, связанных какими-либо формами
взаимодействия и образующих некоторое целостное единство. Объекты (эле-
менты) могут быть абстрактными или материальными. Если объектами служат
машины, аппараты или какие-либо другие технические устройства, то такие
системы называют техническими. Системы, элементы которых взаимодейст-
вуют посредством жидкости или газа, называют соответственно гидросисте-
мами или пневмосистемами. К гидросистемам относятся несколько соединен-
ных между собой гидравлических устройств (например гидроприводов) или
одно устройство, включающее более простые, но взаимосвязанные между со-
бой элементы (гидроусилитель либо клапан). Примерами гидросистем могут
служить гидравлические следящие приводы, гидравлические регуляторы, сис-
темы питания жидкостью под давлением каких-либо устройств, топливные
системы, системы теплоснабжения и др.
Гидросистемы и пневмосистемы с древних времен создавались и применялись
человеком. После изобретения первых паровых машин и появления фабрично-
го производства для передачи энергии и управления машинами стали исполь-
зоваться различные устройства, работающие на жидкости или воздухе.
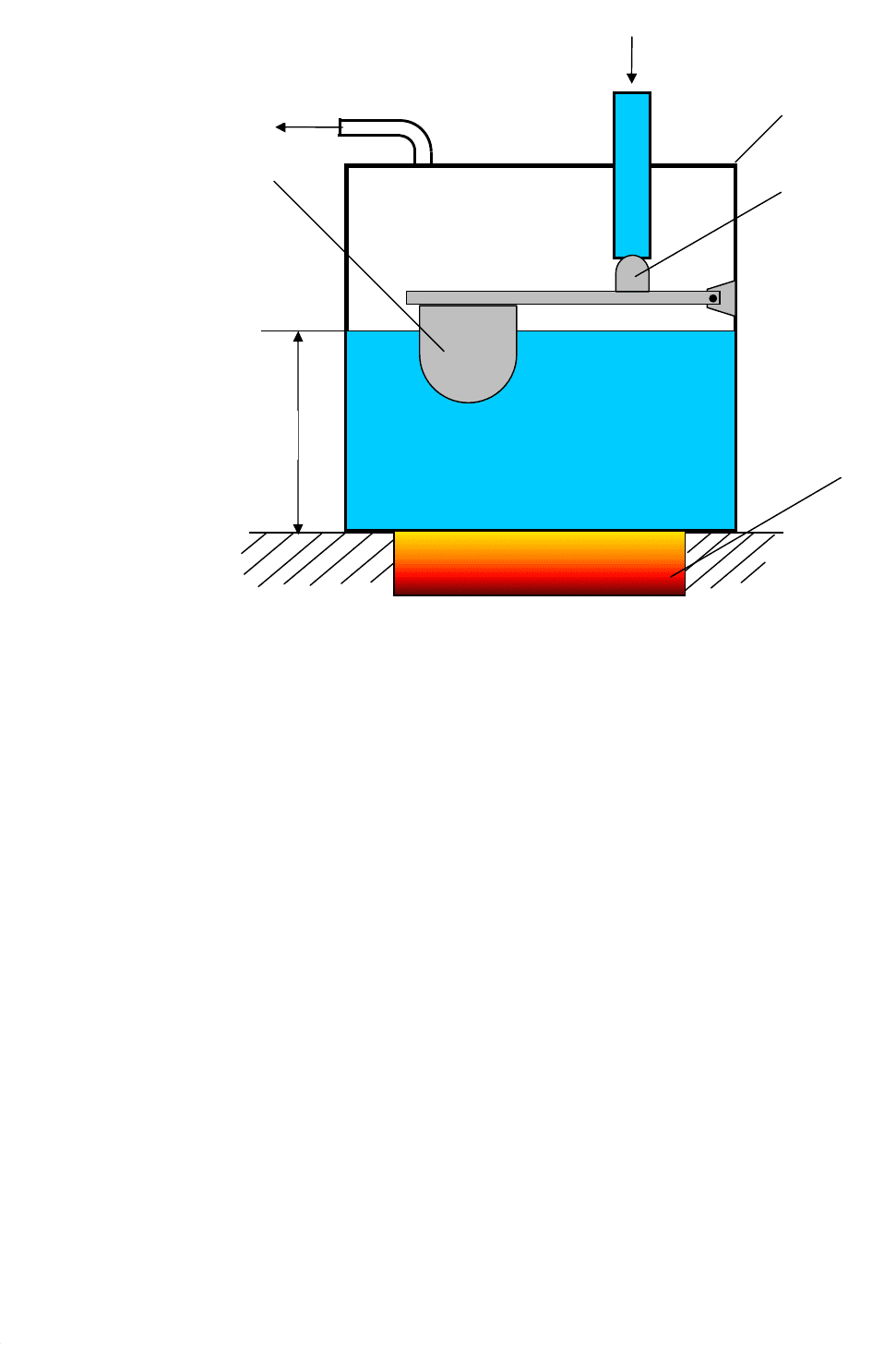
К первым системам автоматического регулирования относится система
(рис. 1), состоящая из котла паровой машины и предложенного И. И. Ползуно-
вым в 1765 г. поплавкового регулятора уровня воды. При увеличении отбора
пара из котла 1 испарение воды идет интенсивнее, уровень H воды начнет
уменьшаться. Тогда поплавок 3, опускаясь, будет шире открывать регулирую-
щий клапан 2, усилится приток питающей воды в котёл 1, и уровень ее будет
автоматически восстанавливаться. Изменение уровня воды в котле могут вы-
зывать и другие причины, например, изменение интенсивности топки, темпе-
ратуры питающей воды или окружающего воздуха. Во всех случаях регулятор
будет действовать так, чтобы ликвидировать изменение уровня воды, по каким
бы причинам оно ни возникало.
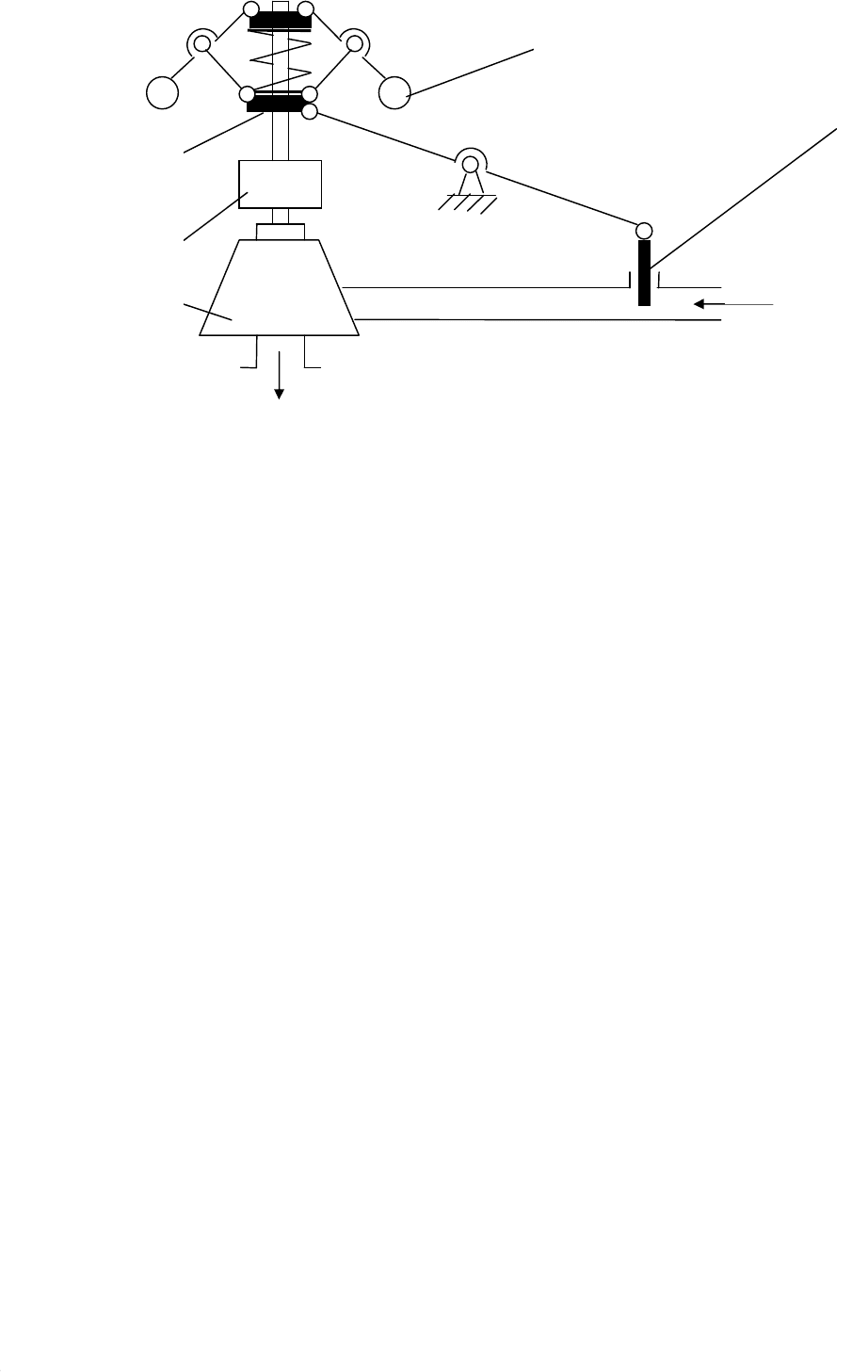
Следующей в истории техники системой автоматического регулирова-
ния была паровая машина с регулятором скорости, предложенным в 1784 г. Д.
Уаттом.
В этой системе (рис. 2) при изменении угловой скорости вала паровой машины
1 грузы 2 центробежного регулятора вследствие изменения центробежных сил
удаляются от вала или приближаются к нему. При этом муфта 3 регулятора
поднимается или опускается, вызывая противоположное перемещение связан-
ной с ним рычагом задвижки 4. Так, если угловая скорость вала паровой ма-
шины 1 увеличивается, грузы 2 центробежного механизма расходятся, муфта 3
поднимается и с помощью рычага перемещает задвижку 4 вниз. Это уменьша-
ет расход пара, поступающего в машину, что приводит к снижению частоты
вращения вала до первоначального значения.
Основной причиной изменения угловой скорости вала паровой машины явля-
ется изменение момента, приложенного к валу со стороны нагрузки 5. Кроме
этого, к изменению угловой скорости вала может привести изменение пара-
метров пара, поступающего в машину. Регулятор гасит влияние любого воз-
действия, чтобы ликвидировать отклонение регулируемой величины (угловой
скорости вала паровой машины), по какой бы причине оно не возникало.
Вода
Пар
Топка
1
2
Рис. 1. Паровой котел с регулятором уровня
H
3
В начале XX в. для управления машинами потребовались быстродействующие
силовые приводы. Этим условиям больше всего соответствовали гидроприво-
ды, в которых по сравнению с электроприводами обеспечивались большие
усилия (на единицу массы привода). Ранее гидропривод использовали в кора-
бельных механизмах (для рулевого управления и поворота орудийных башен).
С 20-х годов гидро- и пневмопривод применяют в металлорежущих станках. В
середине 30-годов гидроприводы начинают использовать в авиационной тех-
нике. На самоходных машинах гидро- и пневмоприводы получили широкое
распространение в рулевых и тормозных механизмах.
В настоящее время гидроприводы применяют в строительных, дорожных, гор-
ных, лесозаготовительных и сельскохозяйственных машинах, на судах, лета-
тельных аппаратах, в подъемно-транспортных механизмах, станках и автома-
тических линиях на машиностроительных, металлургических и предприятиях
и др.
Пневмоприводы преимущественно используют в производствах с повышен-
ным уровнем запыленности и температуры, пожарной опасности. Это дерево-
обрабатывающее, кузнечнопрессовое, литейное, сварочное, нефтеперерабаты-
вающее производства.
Пневмоприводы нашли широкое применение при автоматизации вспомога-
тельных операций: зажим деталей, сборка узлов, упаковка готовой продукции
и др.
В настоящее время гидро- и пневмосистемы используют практически во всех
областях техники. Развитие робототехники, создание гибких автоматизиро-
1
5
2
3
4
Пар
Рис. 2. Паровая машина с регулятором скорости

ванных производств, осуществление полной автоматизации управления произ-
водственными процессами, автоматическое управление летательными аппара-
тами, транспортными и энергетическими установками неразрывно связаны с
развитием и совершенствованием гидро- и пневмосистем.
Требуемое состояние системы и перевод системы из одного состояния в
другое обеспечивается управлением. Под управлением понимается комплекс
действий, направленных на достижение определенной цели. Управление со-
провождается регулированием различных физических процессов. Регулирова-
ние состоит в том, что система подвергается таким воздействиям, благодаря
которым, несмотря на внешние возмущения величины, характеризующие со-
стояние системы, сохраняют значения в заданных пределах или изменяются по
заданным законам.
Примером простейших систем автоматического регулирования могут служить
системы с регуляторами И. И. Ползунова и Д. Уатта, рассмотренные выше
(рис. 1 и 2).
Регулирование с участием человека называется ручным. В большинстве облас-
тей современной техники применяется автоматическое регулирование процес-
сов, т. е. регулирование без непосредственного участия человека.
Регулирование основано на принципе отрицательной обратной связи, согласно
которому информация о состоянии системы обрабатывается в сознании чело-
века (при ручном регулировании) или какими-либо устройствами (при автома-
тическом регулировании) для выявления отклонений в поведении системы от
заданного и создания регулирующего воздействия, направленного на устране-
ние этого отклонения.
Теория автоматического регулирования (ТАР) включает принципы регулиро-
вания различных процессов, методы исследования, расчета и проектирования
устройств, обеспечивающих автоматическое регулирование. Эта теория вхо-
дит в основу дисциплины “Теория автоматического управления (ТАУ)”, в ко-
торой рассматривается более широкий круг научных и прикладных задач
управления техническими системами.
В свою очередь, теорию управления можно рассматривать как часть более об-
щей науки – технической кибернетики. Предметом технической кибернетики
является изучение технических систем с автоматическим управлением, сбор и
анализ информации о свойствах технических объектов (машин, аппаратов,
станков), построение на основе результатов этих исследований законов регу-
лирования и управления.

Управление может быть автоматическим и полуавтоматическим. При полуав-
томатическом управлении часть операций выполняет человек, а часть– уст-
ройства автоматики. При автоматическом управлении без непосредственного
участия человека кроме автоматического регулирования производятся пуск в
действие и остановка по заданной программе машин, аппаратов, станков или
других элементов системы, защита системы от аварийных ситуаций, перена-
стройка системы на новые режимы работы.
Широкое внедрение автоматического управления в различные отрасли народ-
ного хозяйства (промышленность, энергетику, сельское хозяйство, на транс-
порте) объясняется следующими причинами:
1) в связи с развитием и совершенствованием машин, аппаратов, стан-
ков и других устройств настолько усложнились многие процессы управления,
что они не могут быть осуществлены непосредственно человеком-оператором;
2) автоматизация обеспечивает улучшение качества продукции, повы-
шение надежности технических систем, сокращение эксплуатационных расхо-
дов;
3) автоматическое управление необходимо при таких процессах, кото-
рые могут быть вредными для здоровья человека (химические производства,
ядерная энергетика и т. п.).
1. ОСНОВНЫЕ ПОНЯТИЯ И ВИДЫ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ
Обобщенные функциональные схемы систем автоматического регули-
рования. Объект регулирования, регулятор. Основные законы регулирования.
Требования, предъявляемые к системам автоматического регулирования.
Устойчивость, точность, качество процессов регулирования.
1.1. Системы автоматического регулирования
Система с автоматическим регулированием протекающих в ней процес-
сов называется системой автоматического регулирования (САР). Машины, ап-
параты, станки или другие устройства, в которых необходимо поддерживать в
заданных пределах либо изменять по заданному закону значения одной или
нескольких физических величин, называют регулируемыми объектами. Ком-
плекс устройств, осуществляющих автоматическое регулирование, образует
автоматический регулятор или сокращенно регулятор.
На структурных схемах систем входящие в них элементы принято обозначать
прямоугольниками, в поле которых указывается назначение элемента или его
математическое описание, а связи между элементами показывают стрелками.
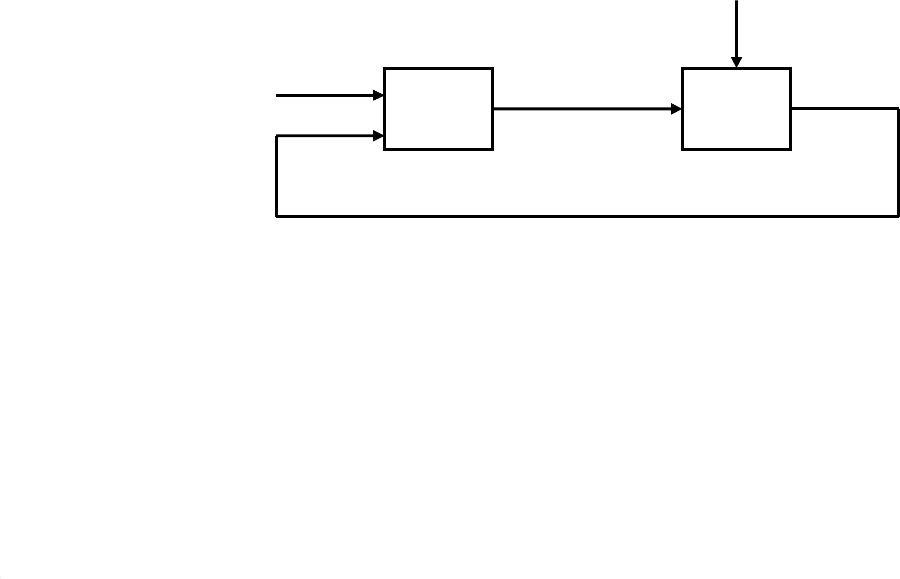
Обобщенную структурную схему системы автоматического регулирования
можно представить в виде замкнутой цепи, состоящей из двух элементов (рис.
1.1): регулятора (Р) и регулируемого объекта (РО).
В этой системе текущее значение регулируемой величины y(t) сравнивается с
заданным законом g(t) её изменения и определяется ошибка (рассогласование):
)
(
)
(
)
(
ε
t
y
t
g
t
−
=
. (1.1)
Заданный закон g(t) изменения регулируемой величины называют в теории ав-
томатического регулирования задающим воздействием.
g(t)
u
(
t
)
f(t)
y(t)
P PO
Рис. 1.1. Структурная схема САР