Нефедов А.Ф., Высочин Л.Н. Планирование эксперимента и моделирование при исследовании эксплуатационных свойств автомобилей
Подождите немного. Документ загружается.

/
т
= J—.— —средневзвешенное по пути передаточное число
трансмиссии.
Связь между оборотностью двигателя и средним передаточным
числом трансмиссии подтверждается экспериментально. Отсюда
следует, что для приближенного определения показателя оборот-
ности достаточно фиксировать путь движения на передачах.
Приближенно средневзвешенное тяговое усилие найдем из вы-
ражения
п
где Р
С
р,г — среднее тяговое усилие при движении на i-й переда-
че,
Н; t
Ri
— время движения на i-й передаче, с; п — число
передач.
Так как
Р
ср
,
=
9,55-
Юз ^срМг
ИЛИ Pcpj
.
= 103
Л^1
«ср Г Ocp.i
то окончательно будем иметь
и Y •
п
N
9,55.10
3
Х^Ч^/
Д/
юз5]-^^^
Р
со
=
} ЛС
Р-' ,Н
илиР
ср
=
l cpi
H. (3.40)
1
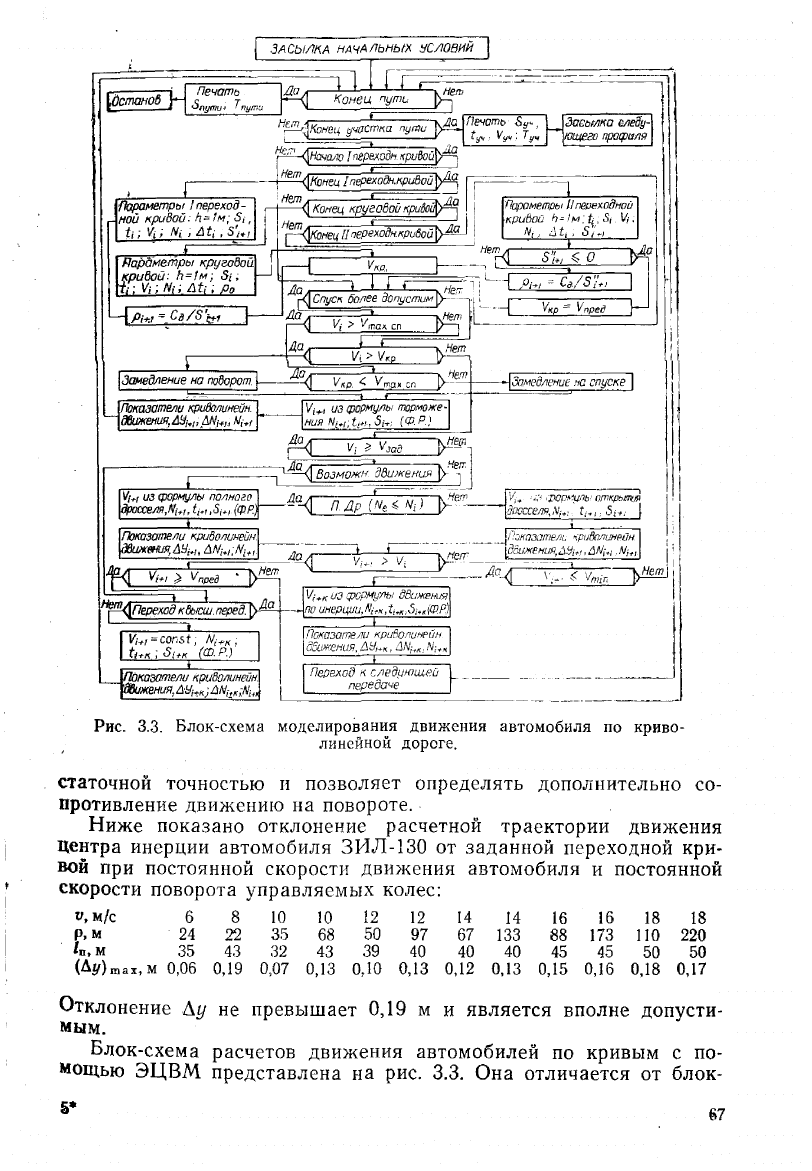
3.4, Моделирование движения по кривым в плане
К специфическим особенностям моделирования эксплуатационных
режимов движения автомобиля на повороте относится обеспечение
его следования по заданной кривой и определение дополнительных
сопротивлений движению.
Поворот состоит из трех стадий: вход в поворот, движение по
круговой кривой (иногда оно весьма кратковременно) и выход из
поворота. При входе в поворот автомобиль движется по переход-
ной кривой, радиус которой постепенно уменьшается от бесконеч-
ности до радиуса основной кривой, являющейся круговой. При
выходе из поворота колеса поворачиваются в обратном направ-
лении до положения, соответствующего прямолинейному дви-
жению.
v
62
Переходной кривой в большинстве случаев является клотоида,
радиус кривизны которой р
д
обратно пропорционален расстоянию
от начала кривой
1
У
то есть
Рд=у. (3.41)
где с — постоянная клотоиды.
Мгновенный радиус кривизны траектории центра инерции авто-
мобиля равен [32]
Ра
=
t^
а
Lk^ + Lkfo+jMal^—jMbiB-li)
В этом выражении обозначения те же, что и в формулах
(3.6) —
(3.9).
Выражение (3.42) связывает радиус кривизны траектории
центра инерции автомобиля с параметрами последнего и с показа-
телями криволинейного движения. Из него следует, что при опре-
деленных конструктивных параметрах автомобиля точность его
следования по заданной траектории будет зависеть от скорости и
ускорения движения, а также от скорости поворота управляемых
колес. Поэтому в ходе моделирования эксплуатационных режимов
движения автомобиля на повороте следует предусматривать:
а) определение возможной скорости движения на повороте и
вида движения;
б) определение скорости поворота управляемых колес, обеспе-
чивающей удержание автомобиля на заданной траектории.
При решении этих задач необходимо учитывать физические и
психофизиологические возможности водителя. В настоящее время
это может быть сделано только приближенно, так как пока не
найдено математическое описание действий водителя.
В качестве критерия безопасного движения автомобиля на по-
вороте многие исследователи принимают величину р, (отношение
поперечной силы к весу автомобиля), которая косвенно характери-
зует физическую нагрузку и напряженность работы водителя. На
основании ряда исследований можно полагать, что рациональному
использованию психических ресурсов водителя соответствует вели-
чина
р
=
0,12—0,15,
которая и может быть принята ,й|ля определе-
ния критической (допустимой) скорости движения на повороте
(при сухом состоянии покрытия) по известной формуле
•^кр
< 1/>о£ (Р + 'п), м/с, (3.43)
где tn — тангенс угла поперечного уклона дороги.
Между периодами движения по первой переходной кривой (вход
в поворот) и по второй (выход из поворота) всегда существует
некоторый промежуток времени (пусть даже бесконечно малый),
в течение которого автомобиль движется по круговой кривой. Ра-
диус кривой в первом приближении может быть принят равным
Радиусу ро, характеризующему основную дорожную кривую (опре-
63

деленному радиусу ро соответствует переходная кривая определен-
ной длины /
п
)
•
Сопоставляя скорость движения в начале переход-
ной кривой и
я
(она известна) с критической скоростью v
Kp
, опре-
делим вид движения и величину среднего ускорения.
Если водитель действует без запаздывания (рассматривается
идеальный процесс управления), то скорость поворота управляе-
мых колес найдем из условия, что в каждый момент поворота
приращения радиусов кривизны переходной кривой и центра инер-
ции автомобиля равны.
Поэтому критерием следования автомобиля по заданной пере-
ходной кривой может быть принято совпадение (с заданной
точностью) мгновенных радиусов кривизны переходной кривой и
траектории центра инерции автомобиля в каждый данный момент
времени или на одинаковом удалении от начала кривой.
Так как отклонение любой точки переходной кривой (соответ-
ственно и траектории центра инерции автомобиля) от направления
прямолинейного движения, предшествовавшего повороту, опреде-
ляется по формуле [8]
v = ~^ 1^+—^ , (3.44)
у
6 с 336 с
3
^42240
с
7
где U — расстояние от начала кривой, м (при постоянной скорости
движения l = vt
t
а при переменной его следует определять путем
суммирования расстояний, проходимых на каждом шаге вычисле-
ний)
;
с — постоянная переходной кривой или постоянная траекто-
рии движения центра инерции автомобиля, равная
с
=
/г#й
г
,
то по
величине разности ку=у
щ
<—y
ai
, м, где у
щ
— отклонение переход-
ной кривой на удалении U от ее начала; у
ч
— отклонение траек-
тории центра инерции автомобиля на том же удалении от начала
переходной кривой, можно судить о точности следования автомо-
биля по заданной переходной кривой.
В соответствии с изложенным приравняем правые части урав-
нений (3.41) и (3.42)
С
- - ^Ш .
(
з.45)
/ L£,8, + Lk
2
b
2
+jMab
2
—JMb (6 -8J
После преобразования этого выражения с учетом значений
производных углов увода (см. § 3.2) и его дифференцирования
получим следующее выражение для определения искомой ско-
рости поворота управляемых колес:
ck
x
L\ k
v
kj \v
vLk
x
dt k
x
j
V v vMbe
г
vMs
г
kj
l
V vk
i
l
v Lki
b + gekt 6-1
_h_d£aM\
(346)
+
vMae k
x
^ vM*
Ч
k
x
dt
LkJ
2
'
64
где
ii и fe —
скорость изменения коэффициентов сопротивления
уводу передней
и
задней осей автомобиля, Н/радс.
В сочетании
с
уравнениями, определяющими производные углов
увода,
это
выражение образует систему уравнений, описывающих
движение автомобиля
по
переходной кривой
в
общем случае (v =
= var, 0=var).
Эта
система дифференциальных уравнений
ре-
шается только численными методами.
В частности, при движении
по
переходной кривой
с
постоянной
скоростью
(u
H
=
t»Kp),
когда скорость поворота управляемых колес
может быть постоянной,
в
результате решений неоднородной
си-
стемы дифференциальных уравнений, определяющих производные
углов увода, методом вариации постоянных находим (при k
=
const):
6i = evb рад;
6
2
=ёт2, рад.
В этих выражениях коэффициенты YI
И
7г
зависят
от
времени
движения
по
переходной кривой
и
скорости автомобиля.
При
f^ gl/ -§-{^
—
^j .
К0Г
Д
а
^ > у
»
и
П
Р
И любом
и
»
k
k
когда
—
-С—
,
характеристические уравнения имеют действитель-
а
Ь
ные корни
и
коэффициенты у
А
и у
2
определяются
из
уравнений
y
i
=
C
i
e
r
>
t
+ D
l
e
r
*
t
—E
i
t—Fuy2= C
2
e^ + D
2
e^~E
%
t—F
2
, (3.47)
где С
1=
Р^ +
Л
С^С.М;
D^Qly +
A
D
2
=
D.N;
£
=
PT
+
QS;
Е
г
=
PTM
+
QSN; F,
=
РТ
- + QS- +
P
+
Q;
F
2
= PTM- + QSN- +
PM
+
QN;
r,
r
0
(B-A)+y
(B
-A)*-4
£
AB
;
ч~ n V
k
2
Lg.
2
L
G
a
v
a
(5^Л)-|/
(5
_Л)з_4^-^)
L
"
G
a
vb'
" ' 2 '
M
=
Г
Л±А
L
•
N
=
Г
Л±А
L
;
Q
=
fi±i
.
I.
p
=
Г
Л±А
.
A
A-£+Mf;
r,
=
-u
7=°—*
;S«H.
L (r
2
-MH
2
L (r
t
+
A)L*
5-3133
65
При v >- 1/ IL\2l— 21), когда — >—, характеристические
2 V G
a
\a bj a b
уравнения имеют комплексные корни и коэффициенты YI И у
2
определяются из уравнений
Yi= (Ci+DJe^—EJ—Hu
у
2
= {C
2
+D
2
)e<*~E
2
t—H
2
, (3.48)
где С
х
= Н
х
cos ^; С
2
=••
- (а +
А)
(С
1
+1)0; ^ = Fsin $t\
D
2
= р - (Fcos ^ - Я
х
sin РО; А = - Л
I
(2 а + Л)
—
о L
L
Е
2
=
- [(а + Л) Е, + POJ; //, = 9 (за - £ + 2Л-2 f) + /г (2а + Л);
.г;
\ а L/
я
2
=-[(а+ 4)^ +
^1;
/?
= £
}2
Зр2_
а
2_|_[Е__
а
1Г
Л
^
-у
+
а /р
2
\ v а" 1
Р \а ) L(a
2
+ p)
2
а
2
+ р
D = - - я - а
—
Л + - ; а =
•
;
L^ \a L/ 2
1/(В-Л)
2
-4(^-Лв)
1=1
U
4*
= 1^1
2г
Так как в конце переходной кривой радиус кривизны траекто-
рии движения центра инерции автомобиля должен быть равен ра-
диусу основной кривой (круговой), то после подстановки значений
углов увода, их производных и угла поворота управляемых колес
Q
=
Qt
в уравнение (3.42) и решения последнего относительно 9 по-
лучим то значение скорости поворота управляемых колес, при ко-
тором автомобиль будет следовать по заданной переходной кривой
6 = ^ , рад/с, (3.49)
Pog*(&iYi + £
2
T2)
где Yi и у
2
определяются при t= —; l
n
— длина переходной кривой;
v
ро — радиус круговой кривой.
В ряде случаев целесообразно использовать упрощенную модель
поворота, построенную при допущении того, что движение по пере-
ходной кривой происходит с некоторой постоянной скоростью, не
превышающей скорости v
Kp
. Это позволяет вести вычисления по
менее громоздкой и трудоемкой схеме.
Изложенный метод определения параметров поворота обеспечи-
вает следование автомобиля по заданной переходной кривой с до-
66
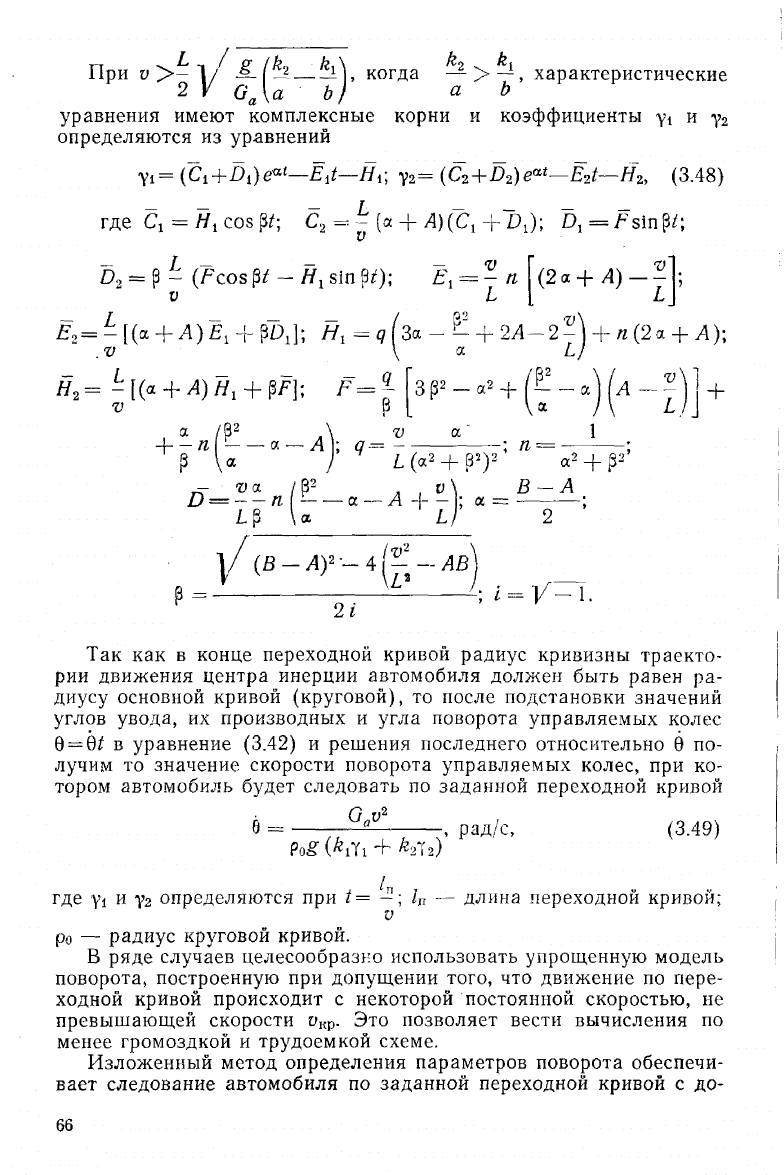
ЗАСЫЛКА НАЧАЛЬНЫХ УСЛОВИИ
^йстаноб
Печать
'Jfiymu* ' пути
Да
П
1
Ггт
р<|
к
№ец
^\tf
[Ъраметры
1
переход-
г
дай
кривой
•
п-1м; Si,
Н
^-г^Конец участка пути §М.
1^~^раыало 1перелоднкриЬой\?Щ
\Hem*—.
'—.••- -.
.гСда
Печать
Sy«,
Эашлка
елеЗу-
\ющего профиля
Л
Параметры круговой
,
кривой:
Ь=1м; Si,
MA; Vr.NtiAtiiPo
Нет
•([Конец круговой кри6ой\уЩ
г—^Конец
Ппвреходнкривой
\у^
ZL
Параметры
И переходной
кривой Ь=1м;Ъ,
S,. Vj,
IV,, at, , SW>
'
т
г€
S'L $ О
УГ
э-Li
Да
у(\Слуск более допустим^-
Нел
F43ZS
Да,
_Сс
35
i' 1 рщ = Ca/S".,
' 1
Укр
=
Vnped
Vi
>
У»
T ^-гя
{Замедление
на
подорот
j =^"
V«.
< Vrr
.Нет
hem
Ч
Показатели
криволцнейн.
движения,
&У
Ы
,AN/*,.,
fJ^f
V|V/ из
формулы
торможе-\
ния
N
if
,;ti»,S^;
(Ф-Р-)
Лс
[Замедление
не спуске
\
V; 2 Узсд
у*
Hep
п
—<]Возможи движения^
-,'
V}+/
из
формулы
полного
дросселя,
N
M
, ti., ,S
iH
.
(ФР.)'
I
Да
Ц
П.
Др
(N
t
< У,-
>
Р
У-,*
;
'".'i
Формулы открытия
дооссе/т,Ы;+
:
;
t,',, 5i-n |
Показатели криволшейн.
д&ижения,АУ
м
,
ДЫ^Ан-
Да
Vi*,
>
Упред
' ^
Ч
V,-v-,.
> V;
•—— j j
v
i+K
из
формулы иоижения\
"^Переход к
высш.
перед.
[уЩ—\по инерцщЦ,
к
,ъ,
к
,5,^тР)\
Vu,-const,
N
i+K
,
ti+K;Si+
K
(СР.Р.У
Показатели
криволинейн.
'$Зижения,ДЦ+
к
;Щ
!К
;Ц
кк
Показателе чривалинейн
I
-\Herr
$дижения,йУм,
ДЫ;*,,
fy
-у ~пн
v....
.<
v
ffi
V
i+K
из
формулы движения]
Показатели криволинейн
движения,
&У
т
,
4Л1^„.
N
]f
,
I
I Переход
к
следующей
У-
Рис.
3.3. Блок-схема моделирования движения автомобиля по криво-
линейной дороге.
статочной точностью и позволяет определять дополнительно со-
противление движению на повороте.
Ниже показано отклонение расчетной траектории движения
Центра инерции автомобиля ЗИЛ-130 от заданной переходной кри-
вой при постоянной скорости движения автомобиля и постоянной
скорости поворота управляемых колес:
и,
м/с 6 8 10 10 12 12
Р,м 24 22 35 68 50 97
'п,м 35 43 32 43 39 40
(Ajf)max.M 0,06 0,19 0,07 0,13 0,10 0,13 0,12 0,13 0,15 0,16 0,18 0,17
Отклонение Ау не превышает 0,19 м и является вполне допусти-
мым.
Блок-схема расчетов движения автомобилей по кривым с по-
мощью ЭЦВМ представлена на рис. 3.3. Она отличается от блок-
14
67
40
14
133
40
16
88
45
16
173
45
18
ПО
50
18
220
50
67
схемы для расчетов прямолинейного движения тем, что предусмат-
ривает непрерывное сравнение кривизны переходной кривой с
кривизной траектории движения центра инерции и расчет пока-
зателей криволинейного движения (углов увода, угла поворота
управляемых колес и скорости их поворота, мощности, необходи-
мой для движения по кривой и пройденного по ней пути). Поэтому
блок-схема для расчета показателей криволинейного движения
включает ряд дополнительных блоков, предназначенных для ука-
занных операций и для вывода на печать упомянутых показателей
криволинейного движения.
Так как исходные данные содержат координаты начала и конца
переходных кривых, то при достижении той или иной переходной
кривой производится непрерывная проверка местонахождения авто-
мобиля на дорожном закруглении. При этом, для обеспечения
необходимой точности определения углов увода, шаг интегриро-
вания уменьшается до
1
м и на каждом шаге определяется рас-
стояние, проходимое автомобилем по кривой, мгновенный радиус
кривизны переходной кривой, возможная скорость движения на
кривой данного радиуса, мощность, необходимая для условно пря-
молинейного движения, и время движения на данном шаге.
Одновременно на каждом шаге проверяется величина спуска.
На спуске, превышающем допустимый, скорость движения Vi
сравнивается с безопасной для данного спуска скоростью
v
maXtCU
.
Если Vi^v
m3i
x,cn, а также если спуск менее предельного, то про-
веряется, не превышает ли скорость V{ критической скорости дви-
жения f
K
p при данном радиусе. Если превышает, то она снижается
путем торможения. Если же Vi>v
maXtC
ji, то сравниваются скорости
^кр и £>тах,сш из которых выбирается меньшая, благодаря чему обес-
печивается устойчивость и безопасность движения. Полагая при
этом скорость движения в пределах шага интегрирования постоян-
ной, находим дополнительное сопротивление движению на пово-
роте АЛф и дополнительные затраты мощности по формуле
AN = jOl
2A
^P-P<+i
t кВт (3
.50)
Затем определяется суммарная мощность, необходимая для
движения, отклонение от заданной траектории Ау и фиксируются
режимы работы двигателя.
В том случае, когда скорость движения в начале шага менее
допустимой по условию устойчивости на повороте, то есть Vi<Cv
Kp
,
проверяется, не превышает ли она заданной скорости и
3
ад- Все
дальнейшие операции подобны операциям основной блок-схемы
(рис.
3.2) с той разницей, что при соответствующих расчетах (см.
блоки, содержащие «Ф. Р.») дополнительно определяются показа-
тели криволинейного движения.
68

3.5. Моделирование движения
в
транспортном потоке
При изучении закономерностей движения автомобилей в потоке
были предложены упрощенные динамические модели, построенные
на допущении того, что автомобили движутся в колонне с одина-
ковой скоростью на одинаковых интервалах, достаточных для оста-
новки без наезда на идущий впереди автомобиль. В результате
более детального изучения взаимодействия движущихся друг за
другом автомобилей была разработана теория следования за ли-
дером, позволяющая исследовать как относительное положение
заданной пары автомобилей, так и общее состояние потока, в част-
ности распространение возмущений вдоль колонны автомобилей.
Теория следования за лидером предполагает, что при движении
в потоке у водителя каждого автомобиля есть свой лидер, огра-
ничивающий выбор им режима движения. В свою очередь, управ-
ляемый им автомобиль является лидером для следующего и т. д.
При малой интенсивности движения, когда каждый водитель отно-
сительно свободен в выборе скорости, сочетания «лидер—ведомый»
образуются сравнительно редко и сохраняются, как правило, крат-
ковременно, а группы ведомых автомобилей немногочисленны.
По мере возрастания интенсивности движения каждый водитель
будет все более стеснен в выборе режима движения теми ограни-
чениями, которые на него налагаются лидером, и все более под-
чиняться закономерностям движения потока в целом. Тогда в силу
вступают другие динамические теории потока, но одновременно
свою действенность сохраняют основные положения теории сле-
дования за лидером.
При таком подходе к моделированию движения автомобилей
в потоке первостепенное значение приобретает вопрос о величине
интервалов между движущимися автомобилями.
Учитывая, что каждый водитель определяет местоположение
своего автомобиля независимо от других (за исключением тех слу-
чаев,
когда интервал очень мал), что интенсивность движения в
данный отрезок времени не зависит от того, какой она была в пред-
шествующий период, и что вероятность одновременного появления
на элементарном отрезке At двух и более автомобилей пренебре-
жимо мала, можем полагать транспортный поток стационарным,
ординарным и не имеющим последействий, то есть он является
простейшим (или стационарным пуассоновским) потоком, для ко-
торого вероятность того, что за время -г произойдет ровно т собы-
тий (появится т автомобилей), равна
P-W-^^. (3-51)
а вероятность того, что участок окажется незанятым, определится
из выражения
Р
0
(х)=е~-\ (3.52)
69
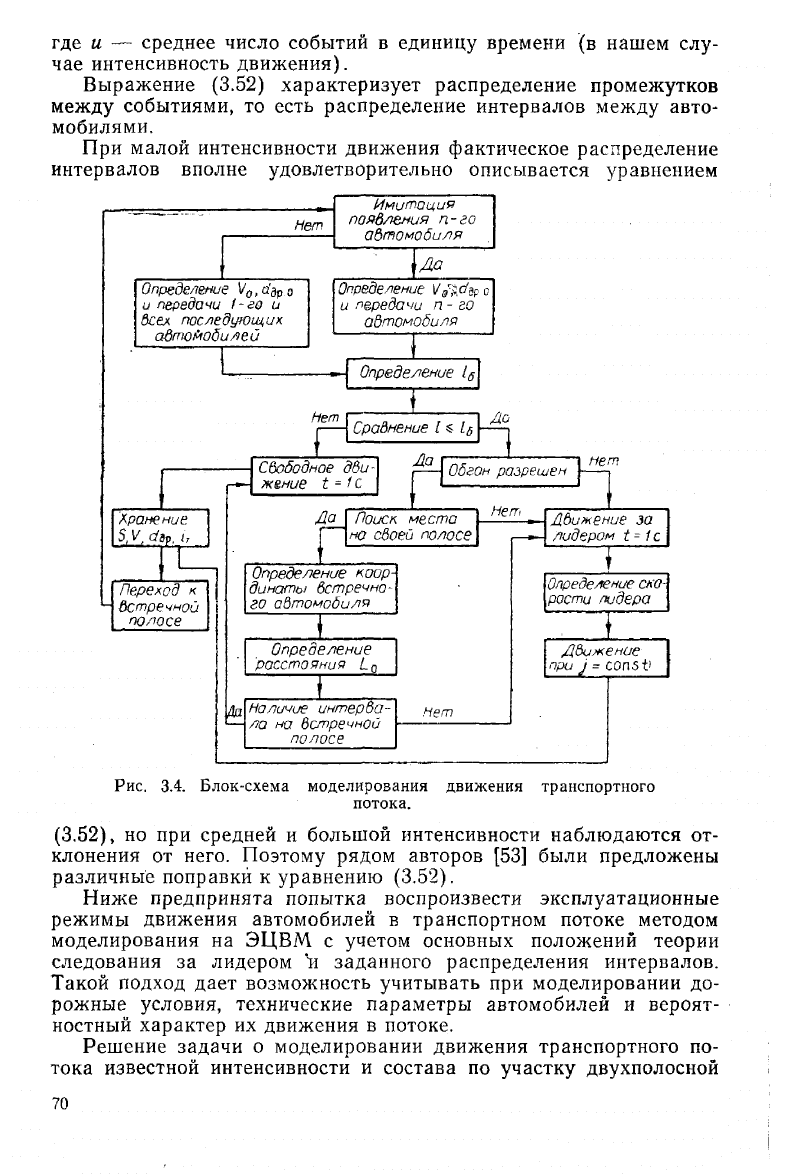
где и — среднее число событий в единицу времени (в нашем слу-
чае интенсивность движения).
Выражение (3.52) характеризует распределение промежутков
между событиями, то есть распределение интервалов между авто-
мобилями.
При малой интенсивности движения фактическое распределение
интервалов вполне удовлетворительно описывается уравнением
Нет
Имитация
появления п.-го
автомобиля
Определение
V
0
,a'a
p
o
и
передачи
1-го и
всея последующи к
автомобилей
\Да
Определение
У^Озр
о
и передачи п - го
автомобиля
Определение
ig
Нет
Хранение
$У,
d3
V
,
i,
Переход к
^встречной
полосе
Сравнение
Ы
1$
До
Свободное дви
жение t -1с
Да
Е
Обгон
разрешен у
нет
Да Поиск места
но своей полосе
Нет,
Определение коор-
динаты встречно-
го автомобиля
Определение
расстояния L
0
умНаличие интерва-
ла на встречной
полосе
Нет
Движение за
лидером t= 1с
Определение ело
рости пидера
Движение
при j = const!
Рис.
3.4. Блок-схема моделирования движения транспортного
потока.
(3.52),
но при средней и большой интенсивности наблюдаются от-
клонения от него. Поэтому рядом авторов [53] были предложены
различные поправки к уравнению (3.52).
Ниже предпринята попытка воспроизвести эксплуатационные
режимы движения автомобилей в транспортном потоке методом
моделирования на ЭЦВМ с учетом основных положений теории
следования за лидером *и заданного распределения интервалов.
Такой подход дает возможность учитывать при моделировании до-
рожные условия, технические параметры автомобилей и вероят-
ностный характер их движения в потоке.
Решение задачи о моделировании движения транспортного по-
тока известной интенсивности и состава по участку двухполосной
70

дороги с встречным движением, ограниченному какими-либо харак-
терными признаками (пересечение, населенный пункт и т. п.), на-
чинается с формирования случайных чисел, имитирующих проме-
жутки времени между появлением автомобилей в начале каждой
полосы движения в соответствии с принятым законом распреде-
ления интервалов.
На рис. 3.4 представлена блок-схема модели движения транс-
портного потока. «Движение» потока в любом направлении начи-
нается с получения первой для данного направления реализации
случайных чисел, с помощью которых определяются моменты появ-
ления автомобилей (с учетом марки) на данной полосе движения.
Затем для каждого автомобиля, находящегося на данной полосе,
производится расчет движения в течение небольшого отрезка
времени t. Расчет ведется последовательно, начиная с первого
автомобиля.
Так как в течение времени t автомобили движутся свободно
(независимо друг от друга), то расчетный промежуток времени
должен быть таким, чтобы исключалось столкновение автомоби-
лей. Очевидно, будет достигнуто достаточное соответствие есте-
ственному движению потока, если время t будет не более времени
реакции водителя, например не более
1
с.
По истечении времени t фактическое расстояние между авто-
мобилями, движущимися последовательно, сравнивается с рас-
стоянием безопасности /б, которое зависит от скорости движения
и приближенно может быть принято равным [37, 54]
h=L
a
+ 2v,u (3.53)
или /
8
= / +
—,
м, (3.54)
где L
a
— длина автомобиля, м; v — скорость движения в фор-
муле (3.53) — м/с, а в формуле (3.54) — км/ч; I и Т— постоянные,
зависящие от типа автомобиля.
Если фактическое расстояние между автомобилями более рас-
стояния безопасности, то автомобиль может двигаться свободно,
а если меньше, то должен следовать за лидером и в дальнейшем
будет учитываться как претендент на обгон.
Для выяснения возможности обгона (при отсутствии знака,
запрещающего его) сначала отыскивается место на полосе дви-
жения данного автомобиля, затем определяется расстояние, необ-
ходимое для обгона, и, наконец, проверяется наличие на встречной
полосе движения интервала по расстоянию, необходимого для
обгона.
Поиск места на своей полосе движения сводится к последова-
тельной проверке расстояний между движущимися впереди авто-
мобилями. Эта проверка продолжается до тех пор, пока не будет
найдено расстояние
L^2l&,
равное удвоенному расстоянию безопас-
ности или больше. Так как число обгоняемых автомобилей не мо-
жет быть чрезмерно большим, то указанная проверка должна
71