Нефедов А.Ф., Высочин Л.Н. Планирование эксперимента и моделирование при исследовании эксплуатационных свойств автомобилей
Подождите немного. Документ загружается.

движения и технических параметров автомобиля, но и от цели,
преследуемой оператором (достижение максимальной скорости,
удобства, безопасности и т. д.), и от особенности восприятия им
общей обстановки движения.
В подавляющем большинстве случаев моделирование движения
автомобиля производится с учетом следующего порядка действий
оператора [22, 33, 36, 49]:
— разгон автомобиля с максимальным ускорением;
— автомобиль движется с наибольшей скоростью, которая не
должна превосходить предельную или установленную ограниче-
ниями, в том числе обусловленными случайными помехами;
— переход на высшую передачу производится при достижении
двигателем заданной частоты вращения вала на данной передаче
и при возможности движения на передаче, подлежащей вклю-
чению;
— переход на низшую передачу производится при снижении
частоты вращения вала двигателя до некоторого предела и при
условии, что сопротивление движению не будет падать в течение
некоторого промежутка времени;
— остановка автомобиля при снижении скорости до предела,
установленного ограничением, происходит с некоторым заданным
ускорением,
В последующих параграфах описаны алгоритмы для воспроиз-
ведения эксплуатационных режимов движения автомобилей по
конкретному маршруту с учетом приведенного порядка действий
оператора, случайных помех движению со стороны других транс-
портных средств и необходимости получения информации о режи-
мах движения и работе агрегатов.
Сложность разработки алгоритмов, обеспечивающих воспроиз-
ведение эксплуатационных режимов движения автомобилей с
учетом большого числа факторов и случайного характера действия
некоторых из них, обусловила необходимость разделить моделиро-
вание эксплуатационных режимов движения автомобилей на ряд
последовательных этапов: сначала моделируется наиболее простое
прямолинейное в плане движение, затем более сложное криволи-
нейное и, наконец, движение в транспортном потоке.
В первых двух случаях моделируется вполне определенный,
то есть детерминированный процесс движения, режимы движения
которого определяются сочетанием технических параметров авто-
мобиля и геометрических параметров дороги. При моделировании
движения автомобилей в транспортном потоке учитываются, кро-
ме того, факторы, определяющие вероятностный характер дви-
жения.
Рассматриваемые далее модели движения позволяют определять
расчетным путем показатели, характеризующие тягово-скорост-
ные свойства автомобилей (расход топлива, время работы двига-
теля и трансмиссии на тех или иных режимах и ряд других).
Модели построены для воспроизведения режимов движения
автомобилей и тягачей типа 4X2 и 6X2 с механическими короб-
42

ками передач при движении этих автомобилей по дорогам с твер-
дым покрытием, без учета буксования сцепления и колес, перерас-
пределения реакций по осям и колесам, колебательных процессов
в трансмиссии и ходовой части, снижения эффективности действия
тормозов и потери устойчивости. Действия водителя при этом
имитируются оператором, обеспечивающим разгон и замедление
автомобиля с заданными ускорениями, определяющимися обста-
новкой движения или возможностями автомобиля, поддержание
безопасных интервалов в транспортном потоке, выполнение манев-
ра обгона, переключение передач, следование по кривой заданного
радиуса и соблюдение установленных ограничений скорости.
3.2. Математическое описание
отдельных фаз движения
В большинстве случаев при аналитических расчетах и определении
экслуатационных показателей движения автомобиля или авто-
поезда рассматривают закономерности движения его центра масс,
которое описывается уравнением [21]
^ = 7~(^-^с), (3.1)
at uG
a
где -• ускорение центра масс автомобиля, м/с
2
; 2Р
С
— суммар-
ен
ная сила сопротивления движению, обусловленная сопротивлением
подъему, качению колес и воздуха, Н; Pk — тяговая сила на ве-
дущих колесах, Н; G
a
— вес автомобиля (автопоезда), Н;
р-cr р
g — ускорение силы тяжести, м/с
2
; б=1+/дв т|
т
+ 2/ь. —
r
x
G G г
2
коэффициент, учитывающий влияние инерции основных вращаю-
щихся масс автомобиля (маховика двигателя и колес); /
дв
—
момент инерции маховика двигателя, кгм
2
; i
T
— передаточное
число трансмиссии; г — радиус качения колеса, м; т)т — КПД
трансмиссии;
I>I
k
— суммарный момент инерции колес, кгм
2
.
Суммарная сила сопротивления движению ИР
С
включает три
слагаемых:
Pf—fGa cos a— сила сопротивления качению;
Pi=G
a
sin a — сила сопротивления подъему;
P
w
= kFv
2
— сила сопротивления воздуху,
где / — коэффициент сопротивления качению; G
a
cos a — нор-
мальная к поверхности дороги составляющая веса автомобиля
(автопоезда), при одределении которой принимают cosa=l, так
как уклоны дороги невелики; G
a
sin a — параллельная поверхности
Дороги составляющая веса автомобиля (автопоезда), при опреде-
лении которой принимается sina=tga = /; величина i подсчиты-
43
вается как отношение (иногда в процентах или промилле) разно-
сти отметок данного участка дороги к длине его проекции на
горизонтальную плоскость; k — коэффициент сопротивления воз-
духа движению автомобиля (на каждый буксируемый прицеп
увеличивается на 25%), Нс
2
/м
4
; F — площадь наибольшего по-
перечного сечения автомобиля, м
2
; v — скорость автомобиля, м/с.
Рассмотрим особенности определения некоторых составляющих
уравнения (3.1).
Сопротивление качению, являющееся результатом взаимодей-
ствия эластичных шин с поверхностью дороги, зависит от таких
факторов:
— конструкции дорожной одежды, материала и состояния по-
крытия;
— скорости движения и передаваемого крутящего момента;
— конструкции шин, их материала, формы беговой дорожки,
давления воздуха в шинах, нагрузки на них;
—- продольного и поперечного скольжения шин, вызванного
передачей тангенциальных и боковых сил;
— колебания шин и осей.
Для шин определенной модели и дорог с твердым покрытием
задача оценки влияния этих факторов на коэффициент сопротивле-
ния качению несколько упрощается и в первом приближении
сводится к учету влияния скорости, нагрузки и неровностей поверх-
ности дороги.
Влияние скорости на сопротивление качению весьма много-
образно. Например, при высоких скоростях движения наблюдается
интенсивный рост сопротивления качению в связи с колебаниями
беговой дорожки при выходе из контакта и проскальзыванием
элементов шины в контакте. Весьма существенным по своему
влиянию на сопротивление движению (при любых скоростях)
является колебательный характер вертикального нагружения шины
в процессе ее качения по дороге с неровностями.
Имеются различного рода зависимости, характеризующие
влияние трех рассматриваемых факторов на коэффициент сопро-
тивления качению. Так, например, в работе [15] рекомендуется
следующая формула для учета влияния скорости движения и не-
ровностей дороги:
f = fo +
fn<m,
где /о учитывает деформацию шин и дороги, трение шин о покры-
тие,
а также в подшипниках ступиц колес, и принимается равным
0,014—0,016; /доп учитывает сопротивление качению, вызванное
действием горизонтальной силы при движении по неровностям,
сопротивлением амортизаторов и трением в рессорах, а также соп-
ротивление деформации шин, и определяется по формуле
/..
=
*,?
+
*»£•
(3-2)
44
Здесь tpi и tjj2 — постоянные коэффициенты; S
H
— суммарный
прогиб рессор на единицу пути, см/км; v — скорость движе-
ния, км/ч.
Таким образом, можно написать
f=r+fv, (з.з)
где
/'-0,015+
<|»Jf.
f
v
=
$3v.
Следует учитывать, что допустимая по плавности хода скорость
движения зависит от величины S
n
и при изменении последней от
0 до 800 см/км может быть определена по формуле[15]
Удод= (kv—US
H
)
t
КМ/Ч,
где K
v
и
А*
— постоянные коэффициенты.
У1
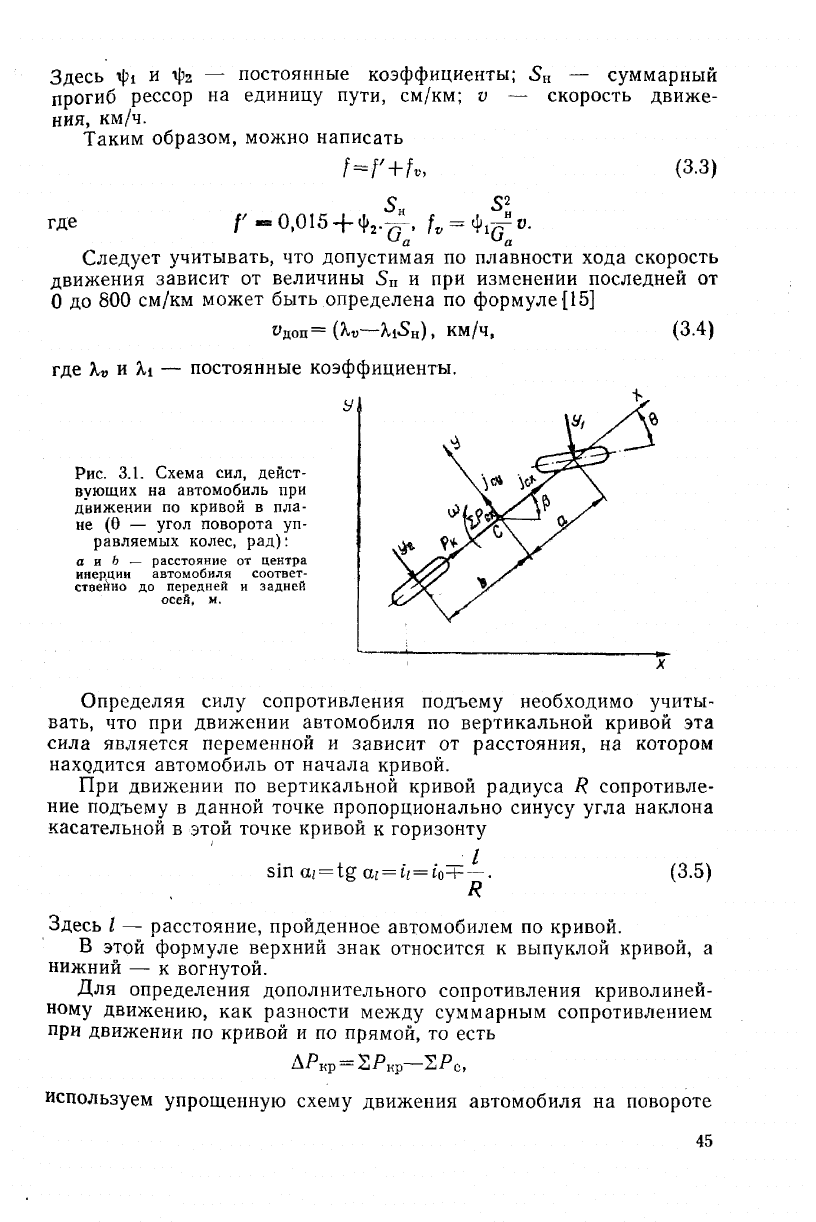
Рис.
3.1. Схема сил, дейст-
вующих на автомобиль при
движении по кривой в пла-
не (0 — угол поворота уп-
равляемых колес, рад):
а и Ь — расстояние от центра
инерции автомобиля соответ-
ственно до передней и задней
осей, м.
(3.4)
Определяя силу сопротивления подъему необходимо учиты-
вать,
что при движении автомобиля по вертикальной кривой эта
сила является переменной и зависит от расстояния, на котором
находится автомобиль от начала кривой.
При движении по вертикальной кривой радиуса R сопротивле-
ние подъему в данной точке пропорционально синусу угла наклона
касательной в этой точке кривой к горизонту
smai = tgai
=
ii =
io
:
¥ — .
(3.5)
R
Здесь I — расстояние, пройденное автомобилем по кривой.
В этой формуле верхний знак относится к выпуклой кривой, а
нижний — к вогнутой.
Для определения дополнительного сопротивления криволиней-
ному движению, как разности между суммарным сопротивлением
при движении по кривой и по прямой, то есть
используем упрощенную схему движения автомобиля на повороте
45
(рис.
3.1). Из схемы имеем следующее уравнение переносного
движения центра инерции автомобиля:
—*;«==/**-* sine-ЕР
СХ
, (3.6)
где /сх — проекция ускорения центра инерции автомобиля на его
продольную ось, м/с
2
; iji — боковая реакция, перпендикулярная
плоскости передних колес, Н; Pk —суммарное тяговое усиление на
ведущих колесах автомобиля, Н; 2Р
С
х — сопротивление подъему,
качению и воздуху, Н.
Сопоставляя это уравнение с уравнением (3.1) и учитывая
2Рсх = 2^с, что следует из поставленной задачи, найдем дополни-
тельное сопротивление криволинейному движению
ДЛч>
=
—Лх
+
^sine.
(3.7)
g
Выразим проекцию ускорения центра инерции автомобиля через
показатели криволинейного движения [32]
Лх = Л-£[&(е-&
1
)-а5,](е-5
1
+ 8
а
)
>
(3.8)
где /о — касательное ускорение центра инерции автомобиля, м/с
2
;
v — скорость движения автомобиля, м/с; 6i и бг — углы бокового
увода передней и задней осей автомобиля, рад; L — база авто-
мобиля, м.
Углы бокового увода найдем интегрированием следующих вы-
ражений:
L V vMbe vMe
L vMz vMaz
где М — масса автомобиля, кг; ki и к
г
— коэффициенты сопро-
тивления боковому уводу передней и задней осей автомобиля,
Р
3
Н/рад; е— — — коэффициент распределения масс.
ab
Учитывая уравнение (3.8) и принимая sin в=6, получаем при
]а
= 0 следующее выражение для определения дополнительного
сопротивления криволинейному движению:
ДР
кр
«
к
х
Ъ
х
Ъ
+ ^ \a\-b
(в-\)\
(в 4-*
2
- 5i). H. (3.9)
Перейдем к определению тягового усилия Рк.
46
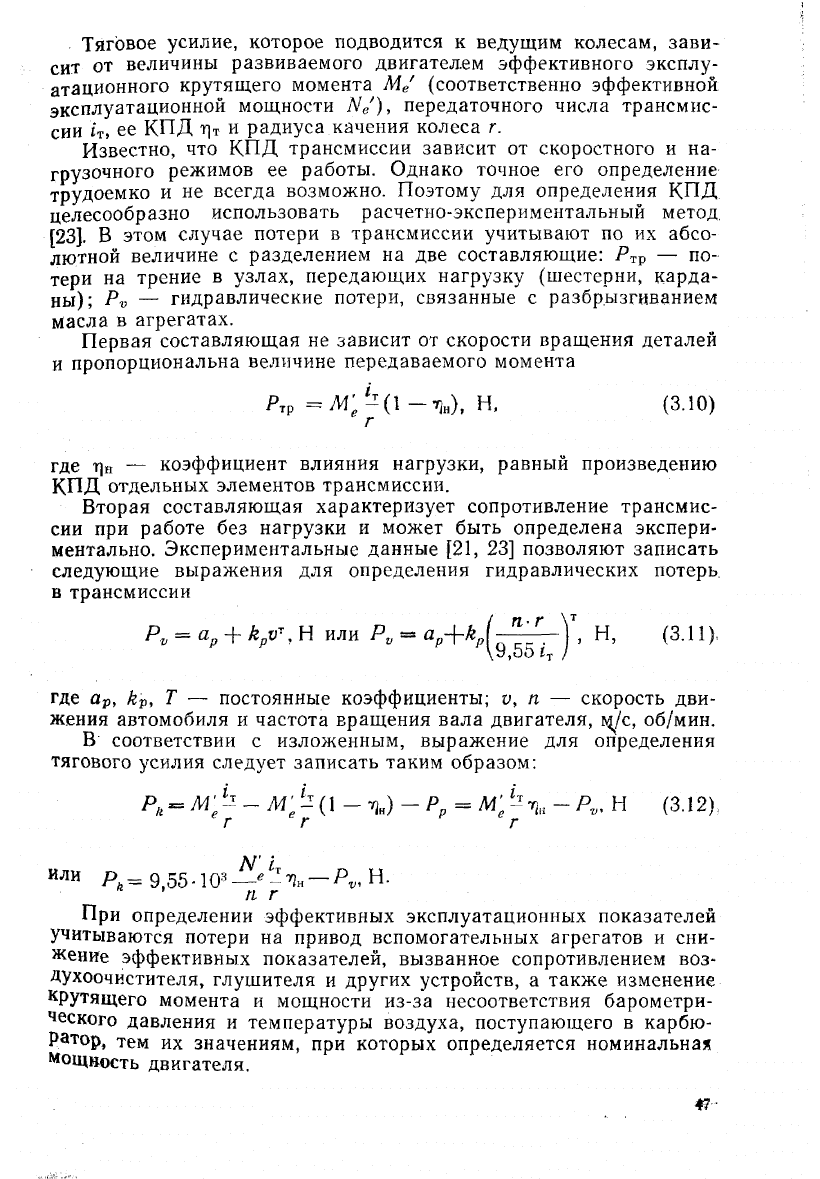
Тяговое усилие, которое подводится к ведущим колесам, зави-
сит от величины развиваемого двигателем эффективного эксплу-
атационного крутящего момента М
е
' (соответственно эффективной
эксплуатационной мощности N
e
'), передаточного числа трансмис-
сии г'т, ее КПД г)
т
и радиуса качения колеса г.
Известно, что КПД трансмиссии зависит от скоростного и на-
грузочного режимов ее работы. Однако точное его определение
трудоемко и не всегда возможно. Поэтому для определения КПД
целесообразно использовать расчетно-экспериментальный метод.
[23].
В этом случае потери в трансмиссии учитывают по их абсо-
лютной величине с разделением на две составляющие: P
rv
— по-
тери на трение в узлах, передающих нагрузку (шестерни, карда-
ны);
P
v
— гидравлические потери, связанные с разбрызгиванием
масла в агрегатах.
Первая составляющая не зависит от скорости вращения деталей
и пропорциональна величине передаваемого момента
р
тр
=ж;^(1-т]
н
), н, (зло)
г
где -Пн — коэффициент влияния нагрузки, равный произведению
КПД отдельных элементов трансмиссии.
Вторая составляющая характеризует сопротивление трансмис-
сии при работе без нагрузки и может быть определена экспери-
ментально. Экспериментальные данные [21, 23] позволяют записать
следующие выражения для определения гидравлических потерь.
в трансмиссии
Pv
=
а
р
+
V
T
>
н
или p
v -
fl
P+*p(;rinn-V'
н
>
(
3
-
11
>•
49,55 h I
где а
р
, k
p
, T — постоянные коэффициенты; v, п — скорость дви-
жения автомобиля и частота вращения вала двигателя, м/с, об/мин.
В соответствии с изложенным, выражение для определения
тягового усилия следует записать таким образом:
е
г г
v
г
или
Я
А
=9,55-Ш»—*S
H
—/\,Н.
' п г
При определении эффективных эксплуатационных показателей
учитываются потери на привод вспомогательных агрегатов и сни-
жение эффективных показателей, вызванное сопротивлением воз-
духоочистителя, глушителя и других устройств, а также изменение
крутящего момента и мощности из-за несоответствия барометри-
ческого давления и температуры воздуха, поступающего в карбю-
ратор, тем их значениям, при которых определяется номинальная
мощность двигателя.
*?•
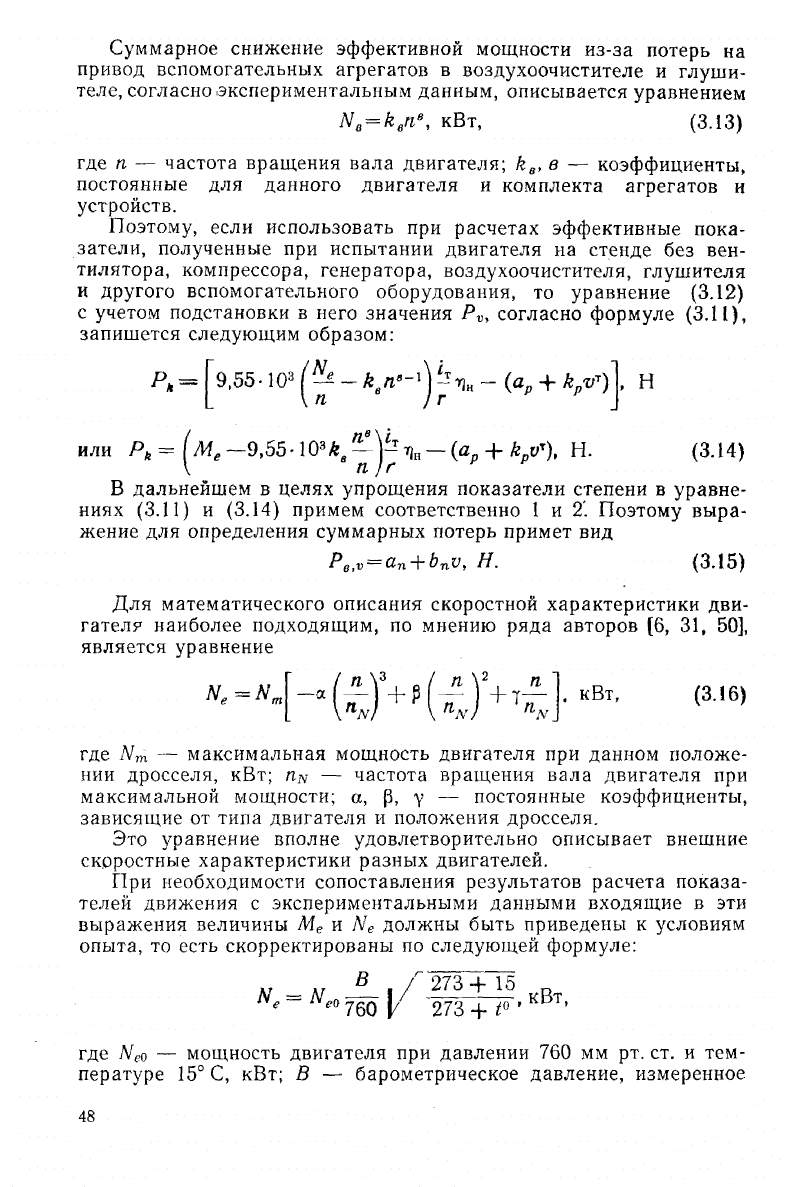
Суммарное снижение эффективной мощности из-за потерь на
привод вспомогательных агрегатов в воздухоочистителе и глуши-
теле,
согласно экспериментальным данным, описывается уравнением
N
tt
= k
e
n*
t
кВт, (3.13)
где п — частота вращения вала двигателя; k
e
, в — коэффициенты,
постоянные для данного двигателя и комплекта агрегатов и
устройств.
Поэтому, если использовать при расчетах эффективные пока-
затели, полученные при испытании двигателя на стенде без вен-
тилятора, компрессора, генератора, воздухоочистителя, глушителя
и другого вспомогательного оборудования, то уравнение (3.12)
с учетом подстановки в него значения P
v
, согласно формуле (3.11),
запишется следующим образом:
Р*
=
9,55-10
3
№ - Л
в
л-Л S
H
- (а, + k
p
V)
Н
или Я
Л
=(л*
в
—9,55-10
я
*, —
\-1)
н
—(a
p
+ V*), H. (3.14)
В дальнейшем в целях упрощения показатели степени в уравне-
ниях (3.11) и (3.14) примем соответственно 1 и 2'. Поэтому выра-
жение для определения суммарных потерь примет вид
P
e
,v
= a
n
-\-b
n
v, H. (3.15)
Для математического описания скоростной характеристики дви-
гателя наиболее подходящим, по мнению ряда авторов (6, 31, 50],
является уравнение
N
0
=N.
-<>i)+^
. кВт, (3.16)
где N
m
— максимальная мощность двигателя при данном положе-
нии дросселя, кВт; n
N
— частота вращения вала двигателя при
максимальной мощности; а, |3, у — постоянные коэффициенты,
зависящие от типа двигателя и положения дросселя.
Это уравнение вполне удовлетворительно описывает внешние
скоростные характеристики разных двигателей.
При необходимости сопоставления результатов расчета показа-
телей движения с экспериментальными данными входящие в эти
выражения величины М
е
и N
e
должны быть приведены к условиям
опыта, то есть скорректированы по следующей формуле:
л;
_ м JL • /"273TT5 о
**-**»760 К 273+*
0
''
где jV
e
o — мощность двигателя при давлении 760 мм рт. ст. и тем-
пературе 15° С, кВт; В — барометрическое давление, измеренное
48
при испытаниях, мм рт. ст.; f — температура всасываемого воз-
духа, измеренная при испытаниях, °С.
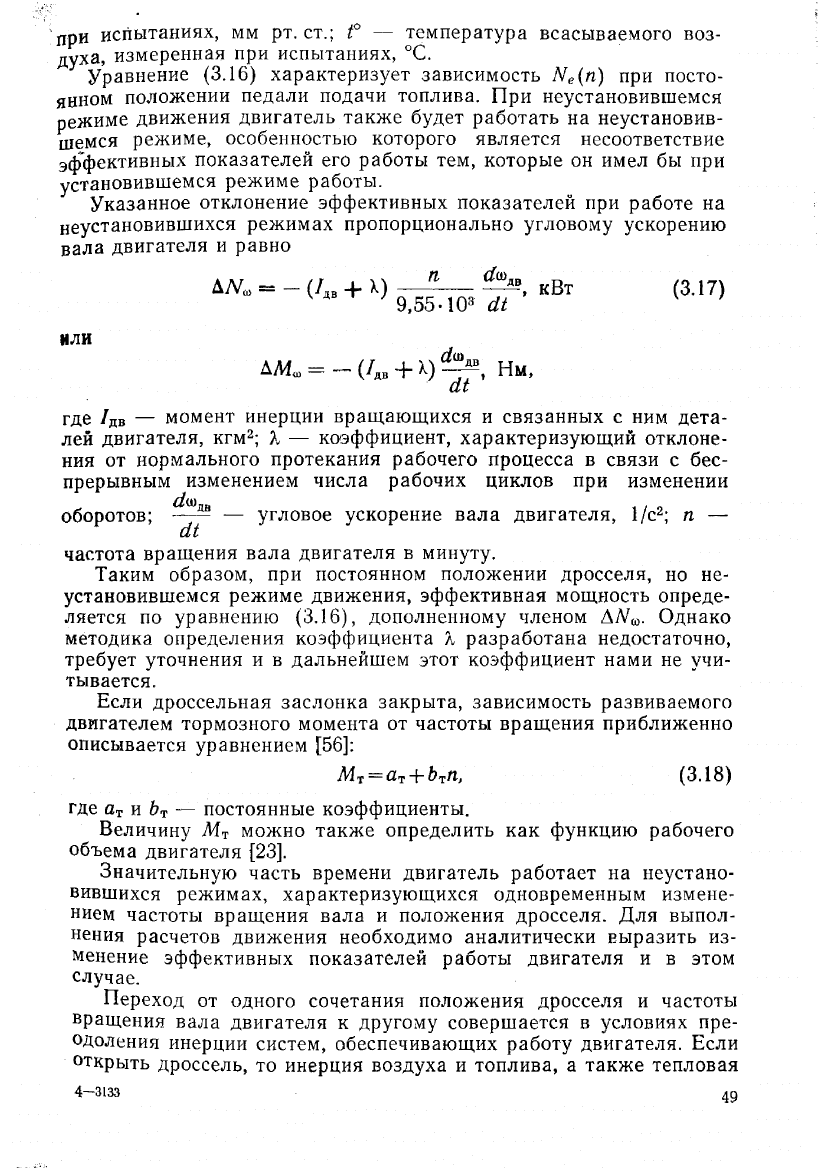
Уравнение (3.16) характеризует зависимость N
e
(n) при посто-
янном положении педали подачи топлива. При неустановившемся
режиме движения двигатель также будет работать на неустановив-
шемся режиме, особенностью которого является несоответствие
эффективных показателей его работы тем, которые он имел бы при
установившемся режиме работы.
Указанное отклонение эффективных показателей при работе на
неустановившихся режимах пропорционально угловому ускорению
вала двигателя и равно
ЛЛГ. --(/„+ X) _£— £а, кВт (3.17)
9,55-10
3
dt
или
дЛ1
ш
= -(/
да
+ х)^, Нм,
at
где /
Д
в — момент инерции вращающихся и связанных с ним дета-
лей двигателя, кгм
2
; X — коэффициент, характеризующий отклоне-
ния от нормального протекания рабочего процесса в связи с бес-
прерывным изменением числа рабочих циклов при изменении
dw
nti
, . „
оборотов; —— — угловое ускорение вала двигателя, 1/с
2
; п —
частота вращения вала двигателя в минуту.
Таким образом, при постоянном положении дросселя, но не-
установившемся режиме движения, эффективная мощность опреде-
ляется по уравнению (3.16), дополненному членом AN
a
. Однако
методика определения коэффициента X разработана недостаточно,
требует уточнения и в дальнейшем этот коэффициент нами не учи-
тывается.
Если дроссельная заслонка закрыта, зависимость развиваемого
двигателем тормозного момента от частоты вращения приближенно
описывается уравнением [56]:
M
r
=
a
T
-\-b
T
n, (3.18)
где а
т
и
Ь
т
— постоянные коэффициенты.
Величину Мч можно также определить как функцию рабочего
объема двигателя [23].
Значительную часть времени двигатель работает на неустано-
вившихся режимах, характеризующихся одновременным измене-
нием частоты вращения вала и положения дросселя. Для выпол-
нения расчетов движения необходимо аналитически выразить из-
менение эффективных показателей работы двигателя и в этом
случае.
Переход от одного сочетания положения дросселя и частоты
вращения вала двигателя к другому совершается в условиях пре-
одоления инерции систем, обеспечивающих работу двигателя. Если
открыть дроссель, то инерция воздуха и топлива, а также тепловая
4-3133 49

инерция деталей приведут систему к новому состоянию равновесия
лишь через некоторый конечный промежуток времени, в течение
которого показатели работы не будут соответствовать данному
положению дросселя при установившемся режиме работы.
При медленном открытии дроссельной заслонки это несоответ-
ствие невелико, а при быстром — значительно. Эксперименты по-
казали, что способность двигателя увеличивать частоту вращения
вала двигателя при открывании дроссельной заслонки, то есть его
приемистость, наряду с другими факторами, зависит от скорости
ее открывания. Существуют оптимальные для каждого двигателя
время и скорость открывания дроссельной заслонки и соответствую-
щий им показатель приемистости. Водитель, стремясь разогнать
автомобиль за минимальное время, учитывает особенности данно-
го двигателя и интуитивно открывает дроссель, как правило, со
скоростью, близкой к оптимальной.
Имея в виду уравнение движения вала двигателя при измене-
нии его частоты вращения [25]
1
ДВ
9,55-10
3
dt
и понимая под показателем приемистости максимально возможное
нарастание мощности за единицу времени, можем написать
р д
9,55-Ю
3
dt
Допуская, что показатель приемистости двигателя остается
постоянным для всей области изменения оборотов и мощности, и
учитывая, что при начальном положении дроссельной заслонки
двигатель развивает некоторую эффективную мощность N
0
, полу-
чаем следующее выражение для определения мощности в процес-
се открытия дросселя:
#
др
-ЛГ
0
+ ЛГ
пр
.*-/
дв
— ^5, кВт. (3.19)
ДР
о-г п
Р
дв
9,55-Ю
3
dt
Баланс сил с учетом всех рассмотренных выше сопротивлений
движению, включая силы инерции поступательно движущихся и
вращающихся масс автомобиля, представлен уравнением (3.20)
в табл. 3.2. В этой же таблице приведены уравнения для опреде-
ления тяговой силы Рк при разных режимах работы двигателя
и указаны номера исходных уравнений, с учетом которых опреде-
ляется тяговая сила в каждом случае.
При этом в случае, когда дроссельная заслонка открывается
со скоростью, обеспечивающей разгон автомобиля с постоянным
ускорением, после замены в уравнениях (3.20) и (3.23) отношений
dv d(a
k
. du
RB
дифференциалов постоянными величинами-—=у
а
,—-=y
ft
,——=
dt dt dt
= /
дв
, получаем алгебраическое уравнение (3.23), решая которое
50
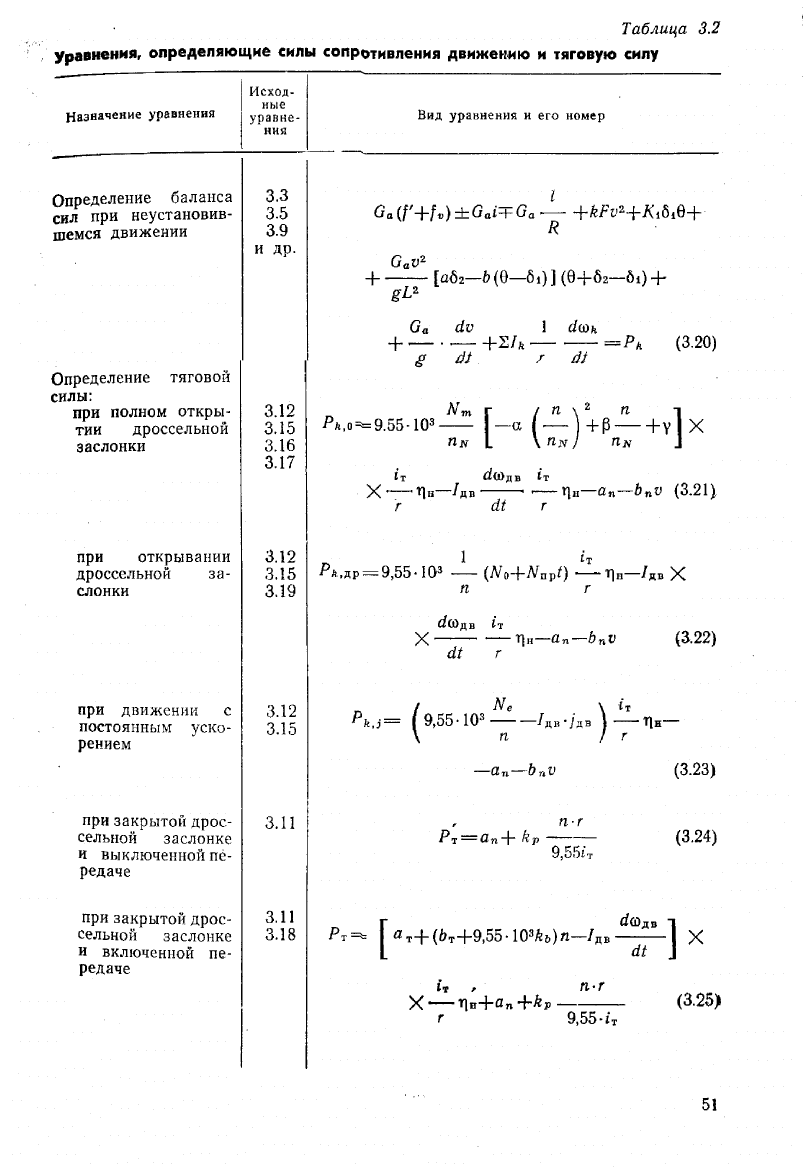
Таблица 3.2
Уравнения, определяющие силы сопротивления движению и тяговую силу
Назначение уравнения
Исход-
ные
уравне-
ния
Вид уравнения и его номер
Определение баланса
сил при неустановив-
шемся движении
Определение тяговой
силы:
при полном откры-
тии дроссельной
заслонки
при открывании
дроссельной за-
слонки
при движении с
постоянным уско-
рением
при закрытой дрос-
сельной заслонке
и выключенной пе-
редаче
при закрытой дрос-
сельной заслонке
и включенной пе-
редаче
3.3
3.5
3.9
и др.
3.12
3.15
3.16
3.17
3.12
3.15
3.19
3.12
3.15
3.11
3.11
3.18
G
e
(r+M±Gai=FG
e
--+W4'2+/(i6ie + -
R
G
a
v
2
4-
[а6
2
—Ь (0—6i)
]
(6+6
2
—6t) +
G
a
dv 1 d(£)k
+
+2/
ft
=P
k
(3.20)
g dt r dt
N
m
г / n \
2
n -i
^9.55-10
3
—a (— +p +Y X
n
N
L \n
N
J n
N
J
£т О0)ДВ IT
X Пи—/д
В
• •—Ци—fln—b
n
v (3.21)
r dt г
Я
А
,„р^9,55-Ю
3
(tfo+JVnpf) —
r\*—/дв
X
n г
С?©дв (т
X Цн—an—bnv (3.22)
/\
j =
f 9,55-10
3
/
дв
-/дв 1—п.
-а
п
—b
n
v
n-r
Р'1
==
йп~Т'
kp
9,551",
(3.23)
(3.24)
d(u
z
[
ашдв i
й
т+(6т4-9,55-10
3
А
ь
)п—/„в I X
U , п-г
X — r\
B
+a
n
+k
P
(3.25)
г 9,55-i
T
51