Нефедов А.Ф., Высочин Л.Н. Планирование эксперимента и моделирование при исследовании эксплуатационных свойств автомобилей
Подождите немного. Документ загружается.

м.енных. Один
из
методов решения этой задачи состоит
в
следую-
щем [55]:
а) выбираются числа
/
0
и е
0
так,
чтобы первое было соизмери-
мо
со
средним моментом инерции,
а
второе
— со
средней подат-
ливостью звеньев системы;
б) рассчитывается масштаб времени
по
формуле
м
>~ш
;
(2
-
8
>
в) выбирается масштаб угловой скорости
М
а
и
рассчитывается
масштаб момента
по
выражению
М
ж
=
М
а
у
/е
л.
J2.9)
г) рассчитываются коэффициенты передачи
по
выражению
£
= ^Н
(2.10)
M
bx
M
t
1
1
где а
= т
—
для
интеграторов, моделирующих массу;
а=
—
—
для
интеграторов, моделирующих упругое звено;
М
вх
—
масштаб вели-
чины
на
входе интегратора;
М
ВЬ1Х
—
масштаб величины
на
выходе
интегратора.
.,
При
затруднении
в
выборе масштабов можно принимать
•:
В этом случае коэффициенты передачи будут равны
—
для
интеграторов, моделирующих массы,
ki= ~ ;
—
для
интеграторов, моделирующих упругие звенья,
ki= —.
e
i
После набора
с
помощью коммутационных устройств машины
составленной структурной схемы решения задачи приступают
к ее
решению.
Результаты моделирования
на
ЭАВМ выдаются
в
дискретном
(показания стрелочных приборов) или непрерывном виде
(на
экра-
не устройства визуального наблюдения телеметрической инфор-
мации).
2.3.
Моделирование
на
электронных цифровых
вычислительных машинах
ЭЦВМ характеризуются быстродействием, высокой точностью,
универсальностью, высокой степенью автоматизации вычислений.
Для решения задачи
на
ЭЦВМ
в нее
должны быть введены
числовые данные
и
правила действия
над
ними
в
соответствии
с
32
определенным алгоритмом. При этом решение задачи сводится
к автоматическому выполнению действий различными устройства-
ми машины по заданной программе, преобразующей вычислитель-
ную задачу в форму, пригодную для решения.
Электронные цифровые вычислительные машины различаются
мощностью, внешним видом, размерами, скоростью выполнения
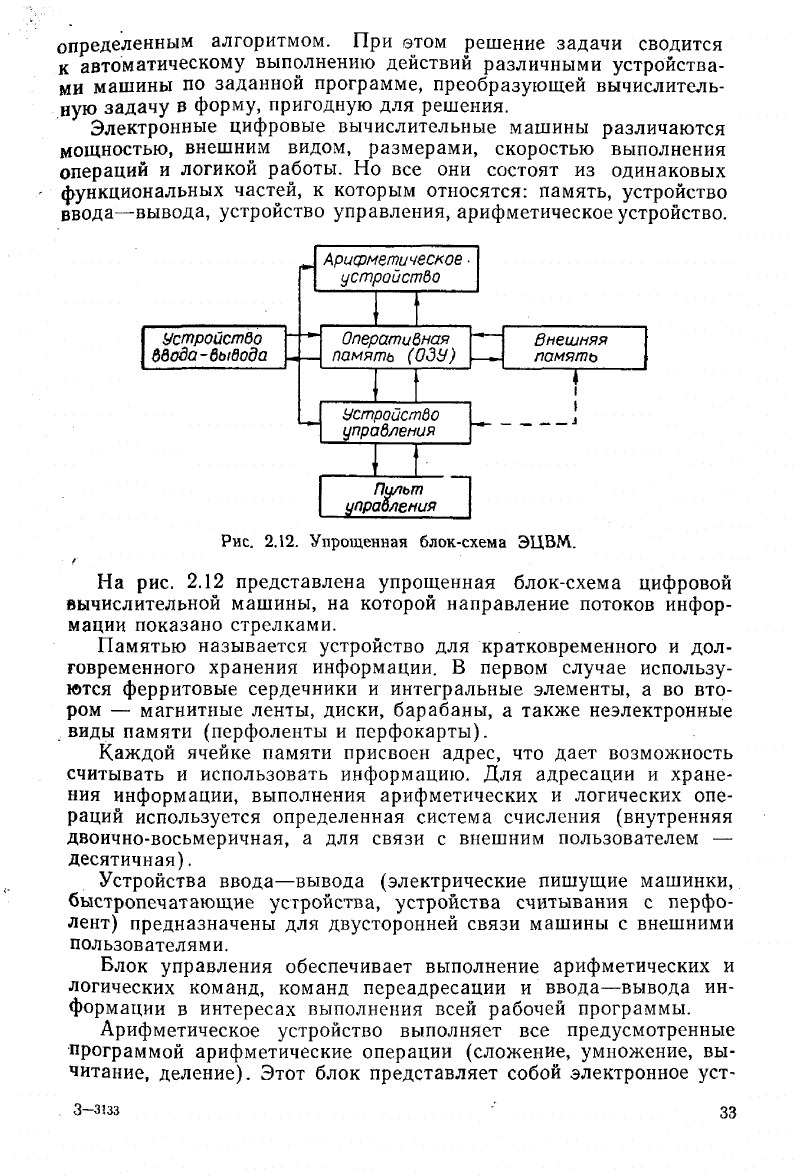
операций и логикой работы. Но все они состоят из одинаковых
функциональных частей, к которым относятся: память, устройство
ввода—вывода, устройство управления, арифметическое устройство.
Устройство
ввода-вывода -
г
-»-
Арифметическое •
устройство
•
i
Оперативная
память (ОЗУ)
.
Устройство
управления
1
Пульт 1
управления
внешняя
память
i
_»_
_ J
Рис.
2.12. Упрощенная блок-схема ЭЦВМ.
На рис. 2.12 представлена упрощенная блок-схема цифровой
вычислительной машины, на которой направление потоков инфор-
мации показано стрелками.
Памятью называется устройство для кратковременного и дол-
говременного хранения информации. В первом случае использу-
ются ферритовые сердечники и интегральные элементы, а во вто-
ром — магнитные ленты, диски, барабаны, а также неэлектронные
виды памяти (перфоленты и перфокарты).
Каждой ячейке памяти присвоен адрес, что дает возможность
считывать и использовать информацию. Для адресации и хране-
ния информации, выполнения арифметических и логических опе-
раций используется определенная система счисления (внутренняя
двоично-восьмеричная, а для связи с внешним пользователем —
десятичная).
Устройства ввода—вывода (электрические пишущие машинки,
быстропечатающие устройства, устройства считывания с перфо-
лент) предназначены для двусторонней связи машины с внешними
пользователями.
Блок управления обеспечивает выполнение арифметических и
логических команд, команд переадресации и ввода—вывода ин-
формации в интересах выполнения всей рабочей программы.
Арифметическое устройство выполняет все предусмотренные
•программой арифметические операции (сложение, умножение, вы-
читание, деление). Этот блок представляет собой электронное уст-
3-3533
33
Определение
требова-
ний к
инсрормоции
и
исходным данным
~-
Постанодка задачи
Анализ задачи
Lc
Сбор необходимой
информации и
исходных данных
Принятие рабочих
гипотез и допущений
Составление
обоснования модели
Определение необхо
димых аппроксимаций
1Л
Определение пара
гЛметроб и
переменным
JL
П-*-" Определение крите
Zr*—Р
ие
^
Эфсрективности
Описание
замысла модели
Подготовка
плана проведения
эксперимента
Выбор ЭВМ Н
Проверка правильнос-
ти замысла модели
н
Доставление докумен-
таиии обоснования
замысла модели
Вывод математи-
ческих Выражений
Составление логе -
ческой блок - схемы
Проверка правиль
ности модели
Составление
спецификации
для программы
Составление
блок-
-схемы программу
Составление плана
рабочих расчетов
3
Проверка 5лок-схе-
мь!
программы
Программирование
(кодирование
программы)
I
Проверка программы
для ЭВМ
Проведение
рабочих расчетов
Составление
документации
по модели на ЭВМ
Вывод уравнений и
получение
повер-х-нос-
тей отклика
Анализ выходнь'х
данных и сравнение
их с входными
Оценка и обобщение
результатов
Составление
отчета
Получение быбодов,
Ь&дачо
рекомендаций
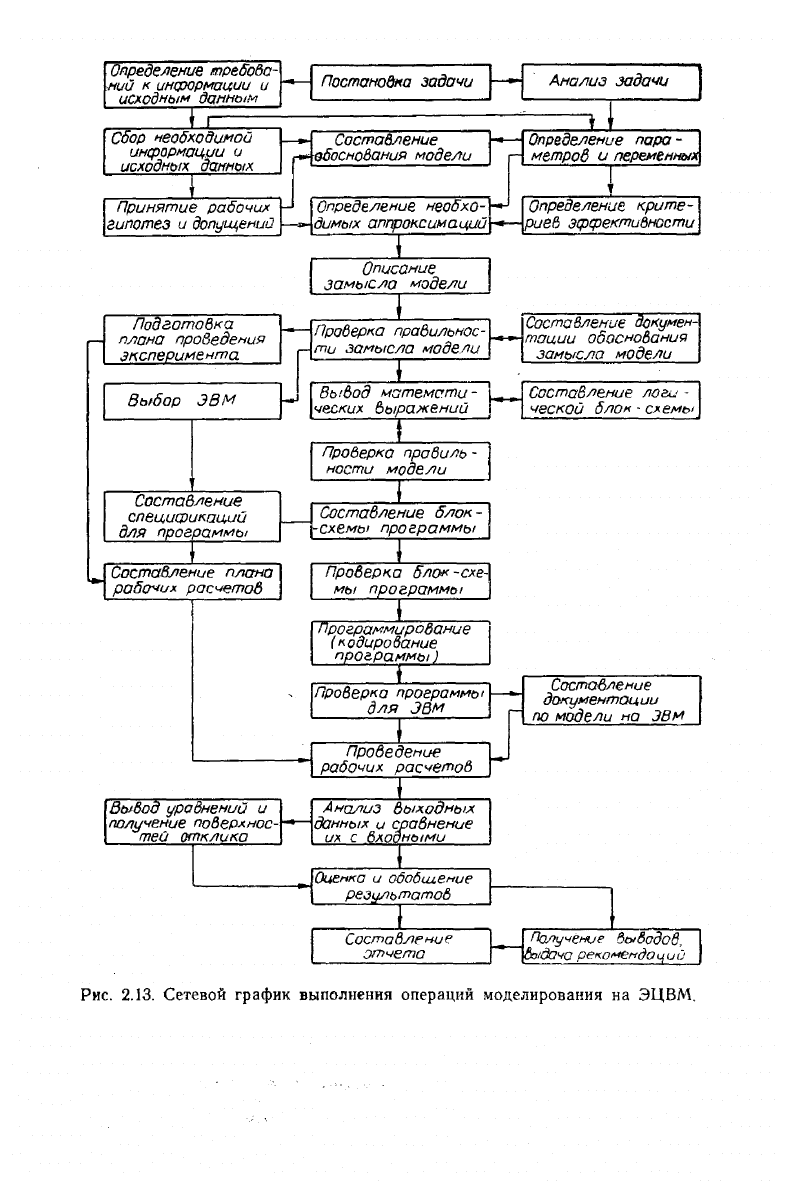
Рис.
2.13. Сетевой график выполнения операций моделирования на ЭЦВМ.
.«©Йств-д, элементы кбторбгб Могут находиться в одном из устой-
чивых состояний «включено» и «выключено». Если одно из этих
состояний условимся обозначать единицей, а другое — нулем, то,
станет понятным большое удобство изображения чисел в машине-
в двоичной системе счисления.
Разработка программ для ЭЦВМ требует много времени и
труда, а также тщательного выполнения всех операций. Чтобы про-
грамма и модель в целом были эффективными, программирова-
нию должна предшествовать серьезная работа и каждый этап
моделирования должен детально анализироваться. На рис. 2.13
показан сетевой график выполнения операций при моделирова-
нии [35]. Этот график дает представление об этапах работы при
моделировании, о составе и содержании операций каждого этапа
и последовательности их выполнения.
Первый этап включает постановку и анализ задачи, сбор необ-
ходимой информации, определение параметров, переменных, кри-
териев эффективности, а также выбор метода решения задачи,
в том числе принятие рабочих гипотез и допущений, и заканчи-
вается описанием замысла модели (см. первые десять блоков на
рис.
2.13). Выполнение этих операций связано с изучением и ана-
лизом поставленной или возникшей задачи, обдумыванием и пла-
нированием методов ее решения путем знакомства с реальным
процессом или его аналогом, изучением структуры и т. п. Резуль*
татом этой работы является создание предварительного варианта
модели.
Перед тем как перейти к очередному этапу, необходимо убе-
диться в достоверности замысла модели путем повторного ее
обдумывания по всем перечисленным операциям и рассмотре-
ния специалистами, не принимавшими участия в разработке мо-
дели.
На втором этапе моделирования — этапе реализации модели —
абстрактный замысел превращается в конкретную модель. Выво-
дятся подробные математические выражения, разрабатывается
логическая блок-схема модели, выбирается ЭВМ, составляется
блок-схема программы, разрабатывается программа, составляется
план проведения экспериментов и рабочих расчетов.
Из существующих способов описания алгоритмов наиболее рас-
пространенным является их описание в виде блок-схем. В этом
случае алгоритм представляется последовательностью блоков, вы-
полняющих определенные функции. Эти функции указываются сло-
весно или в виде формул внутри блоков. Связь между блоками
показывается стрелками. Таким образом, блок-схема дает упоря-
доченное и наглядное представление моделируемого процесса.
На различных этапах решения задачи разрабатываются блок-схе-
мы разной степени детализации.
Логическая блок-схема отражает логическую структуру про-
цесса. Она дает упорядоченную последовательность вычислитель-
ных операций, сравнений и проверок, связанных с решением
задачи. Блок-схема программы показывает порядок программной
а*
35

реализации модели, то есть представляет собой интерпретацию
логической блок-схемы составителем программы. Каждой проце-
дуре логической блок-схемы соответствует совокупность элемен-
тарных операций программной блок-схемы. При этом переход от
логической блок-схемы к программной не меняет ценности про-
граммы.
Машинная программа решения задачи может быть составлена
как на основном машинном языке, так и на одном из алгоритми-
ческих языков (АЛГОЛ, ФОРТРАН, АКИ, КОБОЛ). В первом
случае используются действительные машинные адреса и коды
команд. Поэтому такой способ программирования называется ко-
дированием. Программы при этом получаются компактными, что
экономит машинное время, но само программирование требует
много времени. Кроме того, трудоемким является и усвоение про-
граммистом самого языка команд данной машины. Во втором
случае программа составляется на некотором условном, общем
для ряда машин, языке и вводится в данную машину с помощью
специального транслятора, автоматически преобразующего исход-
ную программу в рабочую. Составление исходной программы при
этом значительно упрощается и ускоряется, однако программа в
целом имеет большой объем, требует больше машинного времени
и занимает больше памяти.
По мере разработки блок-схемы и машинной программы про-
изводится их проверка. Первая проверка должна дать ответ на
вопрос, насколько логическая блок-схема и используемые урав-
нения отражают замысел модели. Следует проверить, соответствует
ли логическая блок-схема предварительному математическому опи-
санию модели и соответствует ли каждому элементу блок-схемы
правильное уравнение. Необходимо убедиться в правильности
размерностей и масштабов величин.
После разработки блок-схемы программы производится про-
верка соответствия каждой операции этой блок-схемы аналогичной
операции логической блок-схемы.
Третья проверка — проверка достоверности программы. — осу-
ществляется, во-первых, обратным переводом программы в блок-
схему, во-вторых —- путем решения задач-тестов, соответствующих
отдельным частям программы, и в третьих — проверкой модели
в целом.
По окончании второго этапа должны быть составлены следую-
щие документы:
1.
Полная логическая блок-схема с подробными, хорошо
обоснованными и подтвержденными математическими выраже-
ниями.
2.
Полная блок-схема программы с указанием системы про-
граммирования и принятых обозначений.
3.
Полная запись всех команд и кодов программы с подтвер-
ждением достоверности вычислений.
4.
Перечень исходных данных и выходных величин с указанием
размерностей, масштабов, диапазонов изменений.
36
5.
Инструкция о работе с программой с указанием затрат рабо-
чего времени.
Моделирование обычно проводится в два этапа: сначала конт-
рольные расчеты, а затем рабочие. Контрольные расчеты прово-
дятся для окончательной проверки модели перед выполнением ра-
бочих расчетов.
Вычислительные центры работают по двум вариантам: либо
«заказчик» сам проводит расчеты по своей программе в установ-
ленное для него время, либо от него принимается программа и
исходные данные, а расчеты производятся операторами вычисли-
тельного центра и «заказчику» выдаются готовые результаты.
Во втором случае операторам нужно дать исчерпывающие инст-
рукции, а получив результаты, проверить их правильность. Чтобы
правильно использовать результаты, необходимо уже на предва-
рительном этапе моделирования знать, что с ними делать и как
их интерпретировать.
Таким образом, моделирование на ЭЦВМ представляет собой
сложный творческий процесс, требующий в то же время проведе-
ния кропотливой трудоемкой работы по сбору информации, под-
готовке исходных данных, проверке результатов и т. п. В ряде слу-
чаев более выгодно к окончательной цели идти итерационным ме-
тодом, то есть методом последовательной разработки моделей.
Сначала разрабатывается более простая модель (охватывающая
только часть процесса, дающая пониженную точность и т. п.), а
затем более сложная.
Такой метод применяется, когда можно удовлетвориться более
грубыми результатами или при необходимости лучше уяснить ряд
вопросов перед построением полной модели, при отсутствии пол-
ной информации о процессе на первом этапе, ограниченных ресур-
сах и т. д. В подавляющем большинстве случаев, особенно в науч-
ных исследованиях, модели первого порядка сложности приносят
большую пользу.
Глава 3
МОДЕЛИРОВАНИЕ ЭКСПЛУАТАЦИОННЫХ
РЕЖИМОВ ДВИЖЕНИЯ АВТОМОБИЛЕЙ
И РАБОТЫ ИХ ОТДЕЛЬНЫХ СИСТЕМ
3.1.
Общие предпосылки
До недавнего времени единственным методом получения показа-
телей (количественных характеристик), необходимых для оценки
эффективности автомобилей и их отдельных эксплуатационных
свойств, были разнообразные виды натурных (дорожных и стен-
довых) испытаний. В настоящее время, наряду с ними, для этой
цели широко применяется математическое моделирование.
Методами воспроизведения (моделирования) эксплуатацион-
ных режимов движения автомобилей на ЭЦВМ может быть полу-
чено большинство представленных в табл. ЗЛ показателей, харак-
теризующих рабочие режимы агрегатов и автомобиля в целом и
фиксируемых при дорожных испытаниях [15]. При этом возможно
изучение большого количества вариантов до изготовления опыт-
ных образцов и устранение влияния неуправляемых факторов
(погоды, особенностей вождения и др.).
Моделирование эксплуатационных режимов движения автомо-
билей с целью расчета показателей движения было одной из пер-
вых задач в области исследования экплуатационных свойств авто-
мобилей и рабочих процессов их систем, при решении которой ста-
ли применяться ЭВМ.
Первоначально ЭВМ использовались для определения лишь
немногих показателей (времени и пути разгона, средней скорости,
расхода топлива) при простейших комбинациях условий и режи-
мов движения (разгон с переключением передач по участку дороги
с постоянным сопротивлением движению, работа двигателя при по-
стоянном положении органа, регулирующего подачу топлива (дрос-
сельной заслонки или рейки подачи топлива), представление про-
дольного профиля дороги без учета переходных кривых и т. д.).
В последующем методы моделирования совершенствовались как
в направлении расширения объема получаемой информации, так
и в направлении увеличения числа учитываемых при моделиро-
вании факторов. На схеме перечислены факторы, под влиянием
которых формируются эксплуатационные режимы движения авто-
мобилей и работы агрегатов. Разработка модели движения с уче-
том такого большого количества взаимно связанных факторов,
многие из которых, в свою очередь, характеризуются несколькими
параметрами, встречает серьезные трудности. Последние усугуб-
ляются тем, что пока недостаточно изучены вопросы оценки пси-
хофизиологических качеств водителя и их влияние на режимы
движения.
38

Показатели рабочих режимов агрегатов автомобиля
Таблица 3.1
Наименование
агрегатов
Показатели, характеризующие рабочие
режимы
Размерности
Автомобиль
Двигатель
Агрегаты силовой
передачи
Сцепление
Коробка перемен-
ных передач
Задний мост
Ножной тормоз
Рулевое управле-
ние
Подвеска
Средняя скорость движения автомобиля
Эксплуатационный расход топлива
Крутящий момент двигателя
Частота вращения вала двигателя
Оборотность двигателя
Средняя температура охлаждающей
жидкости
Средняя температура масла в картере
двигателя
Количество циклов нагружений деталей
трансмиссии по нескольким диапазо-
нам крутящего момента на каждой
передаче
Статистическое распределение крутяще-
го момента на полуоси по пробегу
автомобиля
Угол буксования сцепления в радианах
на 1 км пробега
Количество включений (выключений)
сцепления на 100 км пробега
Количество включений отдельных пере-
дач на 100 км пробега
Длительность движения на отдельных
передачах по пути (или времени) в
процентах к общему пробегу (време-
ни)
Температура масла в картере коробки
передач
Температура масла в картере
Тормозной момент
Путь торможения в процентах к общему
пробегу автомобиля
Количество торможений на 1 км пробе-
га
Средняя температура тормозных накла-
док
Статистическое распределение угла по-
ворота рулевого колеса по пробегу
автомобиля
Суммарный прогиб рессор в см на 1 км
пробега
Частота возмущающих воздействий
км/ч
л/100 км
Нм
об/мин
об/км
°к
°К
рад/км
вкл/100 км
вкл/100 км
%
°К
"К
Нм
%
торм/км
°К
см/км
рад/с
В связи с этим идут либо по пути создания моделей подсистем,
определяющих соответствующие эксплуатационные свойства (тор-
мозные, плавность хода, управляемость), и учитывают факторы,
относящиеся только к данной подсистеме, либо по пути упроще-
ния общей модели движения.
39
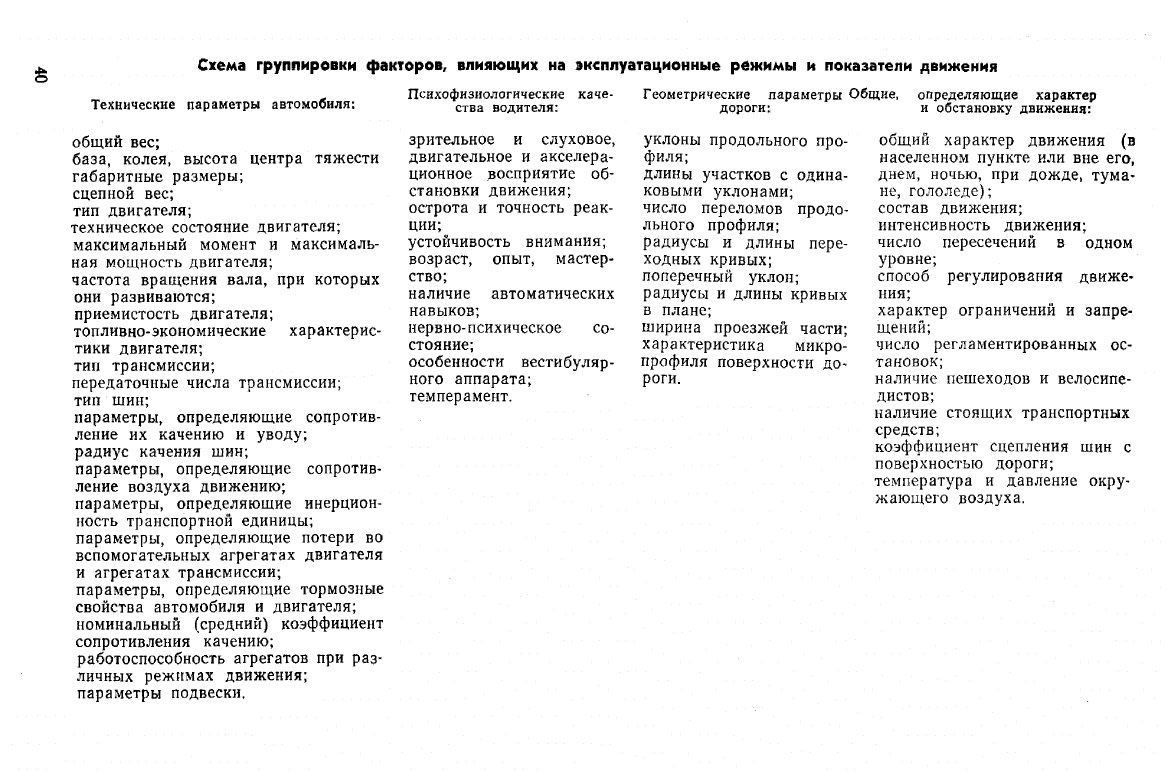
£
Схема группировки факторов, влияющих на эксплуатационные режимы и показатели движения
Технические параметры автомобиля:
Психофизиологические каче-
ства водителя:
Геометрические параметры Общие, определяющие характер
дороги: и обстановку движения:
общий вес;
база, колея, высота центра тяжести
габаритные размеры;
сцепной вес;
тип двигателя;
техническое состояние двигателя;
максимальный момент и максималь-
ная мощность двигателя;
частота вращения вала, при которых
они развиваются;
приемистость двигателя;
топливно-экономические характерис-
тики двигателя;
тип трансмиссии;
передаточные числа трансмиссии;
тип шин;
параметры, определяющие сопротив-
ление их качению и уводу;
радиус качения шин;
параметры, определяющие сопротив-
ление воздуха движению;
параметры, определяющие инерцион-
ность транспортной единицы;
параметры, определяющие потери во
вспомогательных агрегатах двигателя
и агрегатах трансмиссии;
параметры, определяющие тормозные
свойства автомобиля и двигателя;
номинальный (средний) коэффициент
сопротивления качению;
работоспособность агрегатов при раз-
личных режимах движения;
параметры подвески.
зрительное и слуховое,
двигательное и акселера-
ционное восприятие об-
становки движения;
острота и точность реак-
ции;
устойчивость внимания;
возраст, опыт, мастер-
ство;
наличие автоматических
навыков;
нервно-психическое со-
стояние;
особенности вестибуляр-
ного аппарата;
темперамент.
уклоны продольного про-
филя;
длины участков с одина-
ковыми уклонами;
число переломов продо-
льного профиля;
радиусы и длины пере-
ходных кривых;
поперечный уклон;
радиусы и длины кривых
в плане;
ширина проезжей части;
характеристика микро-
профиля поверхности до-
роги.
общий характер движения (в
населенном пункте или вне его,
днем, ночью, при дожде, тума-
не,
гололеде);
состав движения;
интенсивность движения;
число пересечений в одном
уровне;
способ регулирования движе-
ния;
характер ограничений и запре-
щений;
число регламентированных ос-
тановок;
наличие пешеходов и велосипе-
дистов;
наличие стоящих транспортных
средств;
коэффициент сцепления шин с
поверхностью дороги;
температура и давление окру-
жающего воздуха.

Рассмотрим один из возможных подходов к построению модели,
предназначенной для воспроизведения режимов движения на
ЭЦВМ с целью исследования тягово-скоростных свойств автомо-
билей, полагая при этом движение устойчивым, а тормоза — обес-
печивающими нормальную эффективность действия в любой мо-
мент движения, и исключая ошибки управления автомобилем.
Вследствие того, что дорога состоит из чередующихся в произ-
вольном порядке горизонтальных участков, подъемов, спусков, вер-
тикальных и горизонтальных кривых разной длины, а также из-за
различных помех движению (перекрестки, некачественное покры-
тие,
недостаточная видимость, сужения проезжей части, встречные,
тихоходные и стоящие на обочинах автомобили и др.), движение
автомобиля складывается из разных по продолжительности перио-
дов разгона, замедления и движения с примерно постоянной ско-
ростью. В любом из этих периодов двигатель может работать при
разных положениях дросселя.
Поэтому моделирование эксплуатационных режимов движения
в общем случае сводится к последовательному решению ряда логи-
ческих задач, то есть к имитации действий оператора и к выпол-
нению вычислительных операций с целью расчета возможной ско-
рости движения в зависимости от геометрических параметров
дороги, ограничений скорости и возможных режимов работы дви-
гателя, определяющихся следующими положениями дросселя:
а) полностью открытый; б) при перемещении его с оптимальной
скоростью, обеспечивающей разгон с максимально возможным
ускорением; в) при перемещении его со скоростью, обеспечиваю-
щей движение с некоторым постоянным ускорением (положитель-
ным, отрицательным или равным нулю); г) полностью закрытый
с выключенной передачей; д) полностью закрытый с включенной
передачей.
Так как при создании алгоритма, обеспечивающего имитацию
действий оператора и выполнение вычислительных операций на
ЭЦВМ, необходимо учитывать особенности уравнений, описываю-
щих движение при указанных положениях дросселя, то моделиро-
ванию эксплуатационных режимов движения в целом предшествует
рассмотрение частных моделей движения и их математическое
описание.
Однако наличие уравнений, позволяющих вычислить скорость,
время движения и другие показатели, не является достаточным
для моделирования эксплуатационных режимов движения в це-
лом. Вычислительные операции, связанные с расчетом показателей
движения в отдельных фазах, должны выполняться в последова-
тельности, зависящей от конкретных условий движения на данном
маршруте, определяющихся численными значениями геометричес-
ких элементов дороги, различных ограничений и порядком чередо-
вания тех и других.
В свою очередь последовательность вычислительных операций
должна соответствовать последовательности действий оператора по
управлению автомобилем, которая зависит не только от условий
41