Нефедов А.Ф., Высочин Л.Н. Планирование эксперимента и моделирование при исследовании эксплуатационных свойств автомобилей
Подождите немного. Документ загружается.

Математические ожидания углов спуска и подъема а
сп
, ос
п
определяются по формуле
(4.8)
где си и U — соответственно уклон и длина спуска (подъема);
2/
г
-
— длина маршрута.
Средние значения углов подъема и спуска определяются по
аналогичной формуле при подстановке вместо длины маршрута
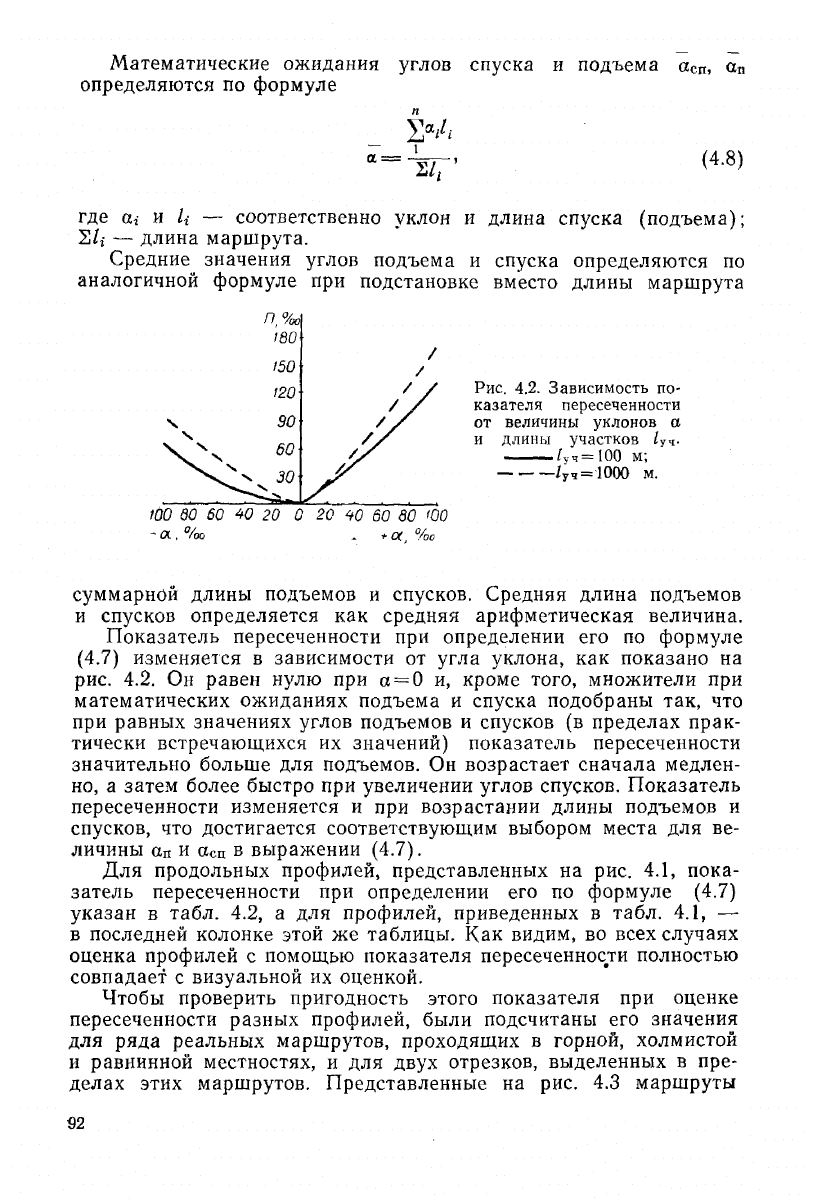
Рис.
4.2. Зависимость по-
казателя пересеченности
от величины уклонов а
и длины участков /
уч
.
/
у
ч =
100
м;
iy,=iooo
м.
100
80 60 40 20 0 20 40 60 80
<00
-
си,
%о
.
+
а.
%о
суммарной длины подъемов и спусков. Средняя длина подъемов
и спусков определяется как средняя арифметическая величина.
Показатель пересеченности при определении его по формуле
(4.7) изменяется в зависимости от угла уклона, как показано на
рис.
4.2. Он равен нулю при а =
0и,
кроме того, множители при
математических ожиданиях подъема и спуска подобраны так, что
при равных значениях углов подъемов и спусков (в пределах прак-
тически встречающихся их значений) показатель пересеченности
значительно больше для подъемов. Он возрастает сначала медлен-
но,
а затем более быстро при увеличении углов спусков. Показатель
пересеченности изменяется и при возрастании длины подъемов и
спусков, что достигается соответствующим выбором места для ве-
личины а
п
и а
сп
в выражении (4.7).
Для продольных профилей, представленных на рис. 4.1, пока-
затель пересеченности при определении его по формуле (4.7)
указан в табл. 4.2, а для профилей, приведенных в табл. 4.1, —
в последней колонке этой же таблицы. Как видим, во всех случаях
оценка профилей с помощью показателя пересеченности полностью
совпадает с визуальной их оценкой.
Чтобы проверить пригодность этого показателя при оценке
пересеченности разных профилей, были подсчитаны его значения
для ряда реальных маршрутов, проходящих в горной, холмистой
и равнинной местностях, и для двух отрезков, выделенных в пре-
делах этих маршрутов. Представленные на рис. 4.3 маршруты
92
,35 I, км
mr#-l*
KM
35 l, км
Н,м
60\ 5 "
гг
10 15 ,
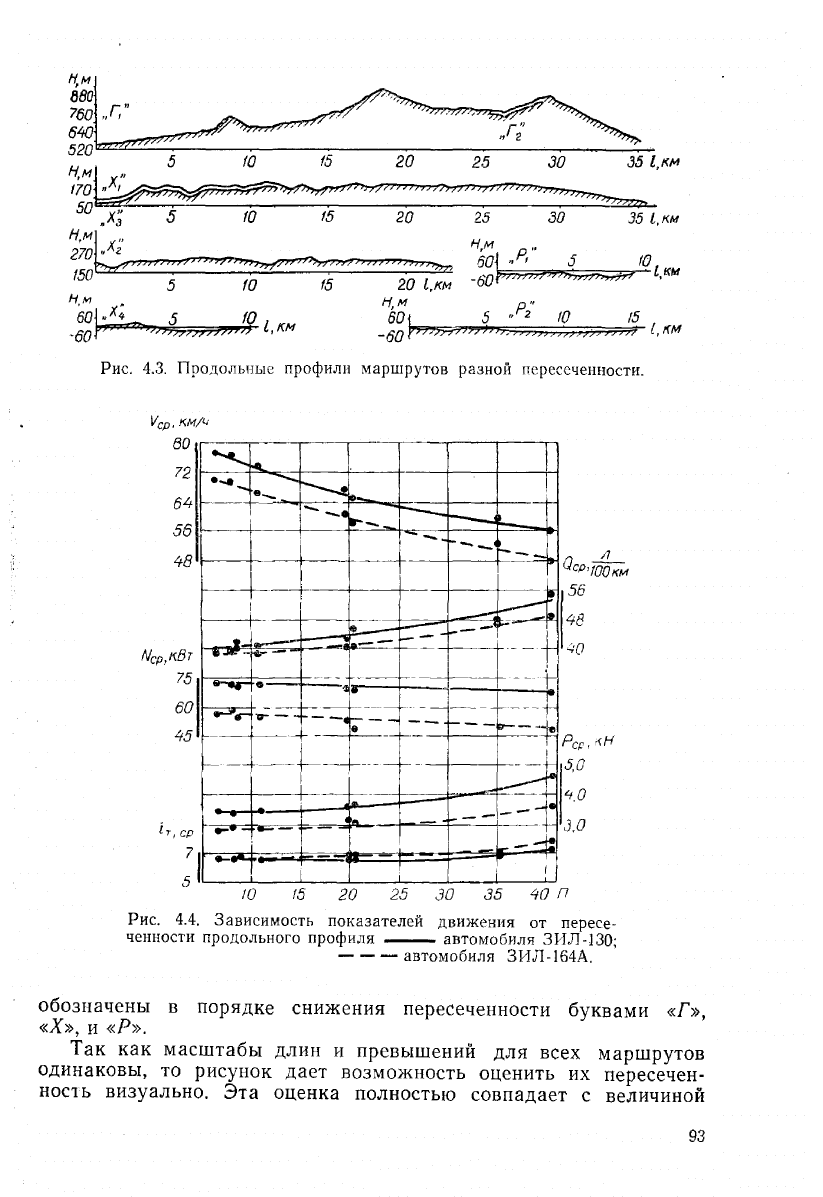
Рис.
4.З. Продольные профили маршрутов разной пересеченности.
V
cp
,
км/ч
60
40 П
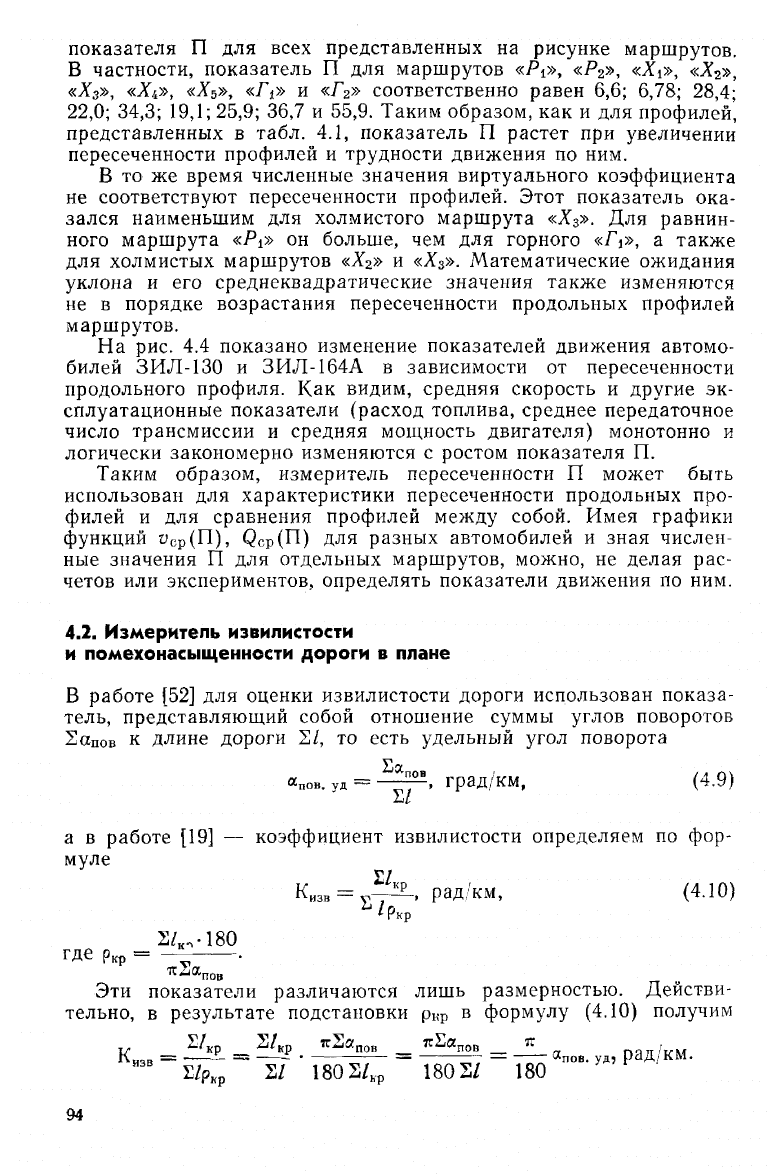
Рис.
4.4. Зависимость показателей движения от пересе-
ченности продольного профиля автомобиля ЗИЛ-130;
автомобиля ЗИЛ-164А.
обозначены в порядке снижения пересеченности буквами «Г»,
«X»,
и «Р».
Так как масштабы длин и превышений для всех маршрутов
одинаковы, то рисунок дает возможность оценить их пересечен-
ность визуально. Эта оценка полностью совпадает с величиной
93
показателя П для всех представленных на рисунке маршрутов.
В частности, показатель П для маршрутов «/V>, «P2», «^1», «^2»,
«^з», «Х^>, «^5», «А» и «Г
2
» соответственно равен 6,6; 6,78; 28,4;
22,0;
34,3;
19,1;
25,9; 36,7 и 55,9. Таким образом, как и для профилей,
представленных в табл. 4.1, показатель П растет при увеличении
пересеченности профилей и трудности движения по ним.
В то же время численные значения виртуального коэффициента
не соответствуют пересеченности профилей. Этот показатель ока-
зался наименьшим для холмистого маршрута «Х
3
». Для равнин-
ного маршрута «Pi» он больше, чем для горного «Л», а также
для холмистых маршрутов «Х
2
» и «Х
3
». Математические ожидания
уклона и его среднеквадратические значения также изменяются
не в порядке возрастания пересеченности продольных профилей
маршрутов.
На рис. 4.4 показано изменение показателей движения автомо-
билей ЗИЛ-130 и ЗИЛ-164А в зависимости от пересеченности
продольного профиля. Как видим, средняя скорость и другие эк-
сплуатационные показатели (расход топлива, среднее передаточное
число трансмиссии и средняя мощность двигателя) монотонно и
логически закономерно изменяются с ростом показателя П.
Таким образом, измеритель пересеченности П может быть
использован для характеристики пересеченности продольных про-
филей и для сравнения профилей между собой. Имея графики
функций £>
ср
(П), Qcp(n) для разных автомобилей и зная числен-
ные значения П для отдельных маршрутов, можно, не делая рас-
четов или экспериментов, определять показатели движения по ним.
4.2.
Измеритель извилистости
и помехонасыщенности дороги в плане
В работе [52] для оценки извилистости дороги использован показа-
тель,
представляющий собой отношение суммы углов поворотов
2а
П
ов к длине дороги 2/, то есть удельный угол поворота
«нов.
уд = —тр. град/км, (4.9)
а в работе [19] — коэффициент извилистости определяем по фор-
муле
К
иав
= J^*-, рад/км, (4.10)
2/
к
.-180
где р
кр
= — .
Эти показатели различаются лишь размерностью. Действи-
тельно, в результате подстановки р
кр
в формулу (4.10) получим
К
изв
- ^ - ^5
•
-^^- = ^^ = —
«псе.
уд
, рад/км.
изв
Е/
Ркр
S/ 180S/
Kp
180S/ 180
94
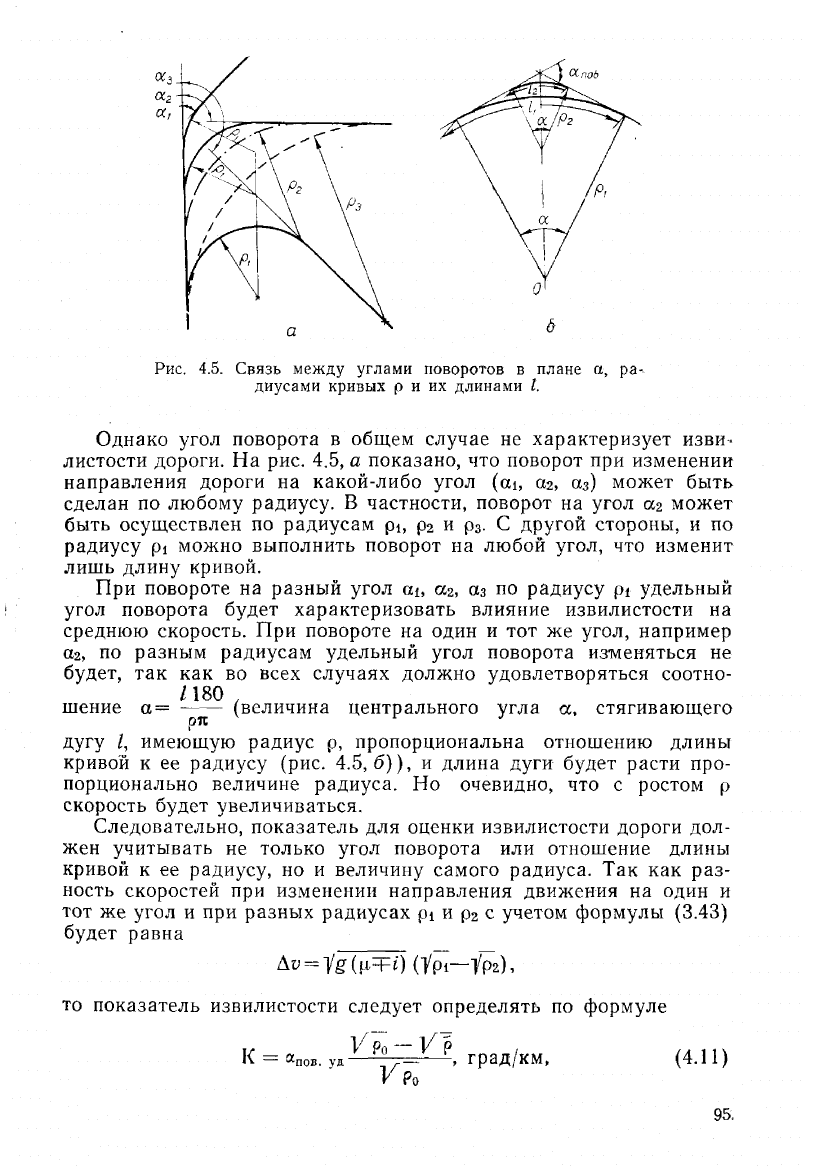
Рис.
4.5. Связь между углами поворотов в плане а, ра-
диусами кривых р и их длинами I.
Однако угол поворота в общем случае не характеризует изви-
листости дороги. На рис. 4.5, а показано, что поворот при изменении
направления дороги на какой-либо угол (cti, cc2, аз) может быть
сделан по любому радиусу. В частности, поворот на угол
а%
может
быть осуществлен по радиусам pi, рг и р
3
. С другой стороны, и по
радиусу pi можно выполнить поворот на любой угол, что изменит
лишь длину кривой.
При повороте на разный угол a
f
, аг, аз по радиусу pi удельный
угол поворота будет характеризовать влияние извилистости на
среднюю скорость. При повороте на один и тот же угол, например
аг, по разным радиусам удельный угол поворота изменяться не
будет, так как во всех случаях должно удовлетворяться соотно-
/180 ,
шение а= (величина центрального угла а, стягивающего
дугу /, имеющую радиус р, пропорциональна отношению длины
кривой к ее радиусу (рис. 4.5,6)), и длина дуги будет расти про-
порционально величине радиуса. Но очевидно, что с ростом р
скорость будет увеличиваться.
Следовательно, показатель для оценки извилистости дороги дол-
жен учитывать не только угол поворота или отношение длины
кривой к ее радиусу, но и величину самого радргуса. Так как раз-
ность скоростей при изменении направления движения на один и
тот же угол и при разных радиусах pi и р
2
с учетом формулы (3.43)
будет равна
At»
= Vff((A
=
F0 (Ypi—Ург),
то показатель извилистости следует определять по формуле
К = «пов.
уд
1
9
1~-У~
9
,
град/км, (4.11)
V
Ро
95.
п
2_i ""ПОВ
где сс
пов
.
уд
=—yj удельный угол поворота, град/км; р
0
— ра-
диус,
при котором скорость не снижается (как показывают наблю-
дения, может быть принят равным 1000—1500 м); р — математи-
ческое ожидание радиуса поворота, которое приближенно можно
принимать равным среднему арифметическому значению радиуса.
Определяемый по формуле (4.11) показатель извилистости уве-
личивается пропорционально удельному углу поворота, но при
данном апов.уд он получается тем меньше, чем больше р и при
.р
=
ро
равен нулю. Таким образом, показатель К логически пра-
вильно отражает влияние геометрических элементов плана дороги
на скорость движения. Рассмотрим вопрос об определении показа-
теля извилистости К с учетом переходных кривых в плане и о
замене различных помех, вызывающих снижение скорости экви-
валентными кривыми.
Для плавного перехода с прямой на кривую в большинстве слу-
чаев делаются переходные кривые. При этом геометрические элемен-
ты дороги в плане будут отличаться от указанных в технической до-
кументации и принимаемых при расчете показателя извилистости К.
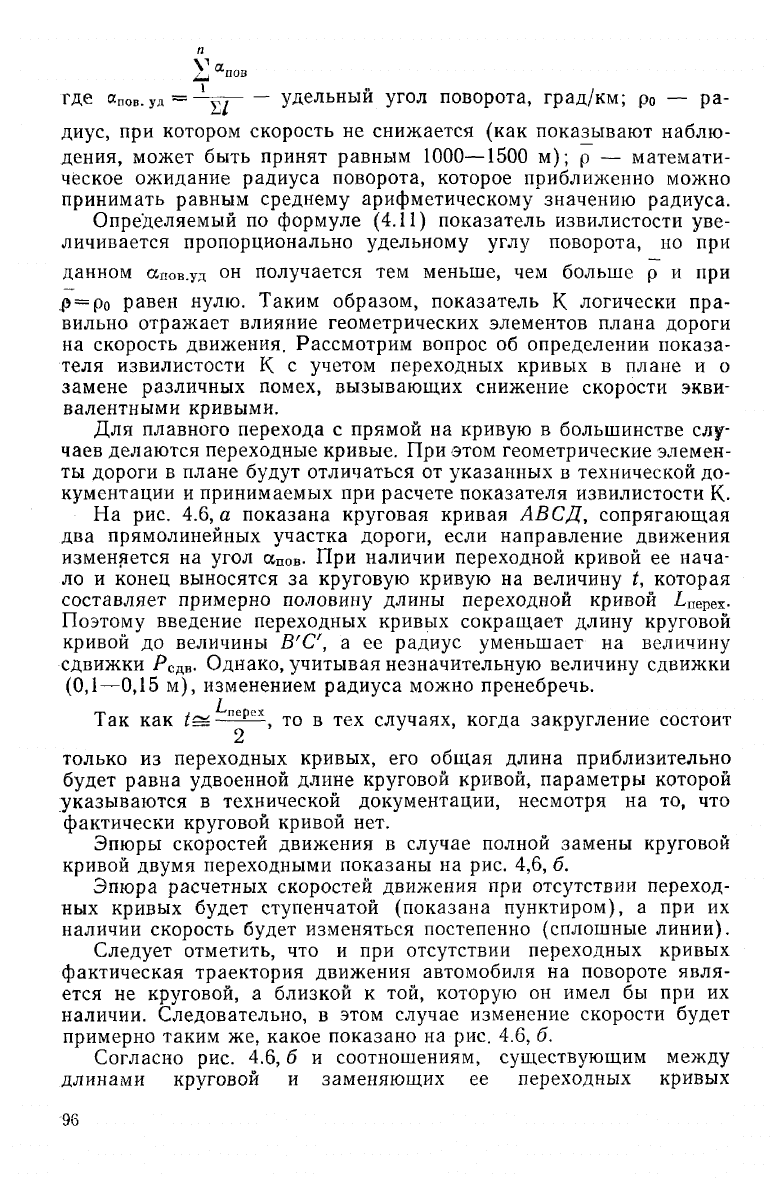
На рис. 4.6, а показана круговая кривая
АВСД,
сопрягающая
два прямолинейных участка дороги, если направление движения
изменяется на угол а
П
ов- При наличии переходной кривой ее нача-
ло и конец выносятся за круговую кривую на величину t, которая
составляет примерно половину длины переходной кривой L
ne
pex-
Поэтому введение переходных кривых сокращает длину круговой
кривой до величины В'С, а ее радиус уменьшает на величину
сдвижки Ясдв- Однако, учитывая незначительную величину сдвижки
(0,1—0,15 м), изменением радиуса можно пренебречь.
Так как /g==
nepex
t
то в тех случаях, когда закругление состоит
только из переходных кривых, его общая длина приблизительно
будет равна удвоенной длине круговой кривой, параметры которой
указываются в технической документации, несмотря на то, что
фактически круговой кривой нет.
Эпюры скоростей движения в случае полной замены круговой
кривой двумя переходными показаны на рис. 4,6, б.
Эпюра расчетных скоростей движения при отсутствии переход-
ных кривых будет ступенчатой (показана пунктиром), а при их
наличии скорость будет изменяться постепенно (сплошные линии).
Следует отметить, что и при отсутствии переходных кривых
фактическая траектория движения автомобиля на повороте явля-
ется не круговой, а близкой к той, которую он имел бы при их
наличии. Следовательно, в этом случае изменение скорости будет
примерно таким же, какое показано на рис. 4.6, б.
Согласно рис. 4.6, б и соотношениям, существующим между
длинами круговой и заменяющих ее переходных кривых
96
(рис.
4.6,
а),
следует,
что
средняя скорость
а
ср
в
обоих случаях
будет одинаковой.
Если закругление, наряду
с
переходными, содержит круговую
кривую,
то
эпюра скоростей будет включать между наклонными
горизонтальную линию, соответствующую скорости движения
по
круговой кривой
и по
длине равную фактической длине последней.
При этом рассуждение
о
влиянии переходных кривых
на
среднюю
скорость остается
в
силе.
\<Х-тюЬ
-дерех
-переи
i
i-nepe*
'
Lnepex
2
.1.
* i
2
•перех.,
Сперехг
-2L
круг
Рис.
4.6. Изменение параметров круговой кривой (а) и скорости движения
(б) при наличии ( ) и отсутствии ( ) переходных кривых.
"прям
—
скорость движения
на
примыкающих
к
кривой прямолинейных участках
до-
роги, и
к
_„
г
—
возможная скорость движения
по
круговой кривой (зависит
от ее
радиу-
са, коэффициента сцепления
Ф и
принятого значения коэффициента поперечной силы
ц),
У
ср
—
средняя скорость.
Из сказанного следует,
что
определение показателя извилисто-
сти дороги
К без
учета параметров переходных кривых является
правомерным.
Так
как
эпюра скоростей, показанная
на рис.
4.6,
б
сплошной
линией, соответствует
не
только движению
на
повороте,
но
при-
близительно
и
всем другим случаям,
при
которых скорость снижа-
ется
до
некоторой величины,
а
затем возрастает (проезд сужений,
перекрестков, остановочных пунктов
и
павильонов,
зон
ограниче-
ний видимости, населенных пунктов,
зон
ограничений скорости,
объезд стоящих автомобилей
и т. п.), то
путем замены любой
из
помех, вызывающих снижение скорости, некоторой эквивалентной
7—3133
97
кривой, можно выразить одним показателем общую помехонасы-
щенность маршрута в плане.
Под эквивалентной кривой в данном случае понимается такая
кривая (с параметрами
р
экв
и
/
ЭИ
в),
средняя скорость движения по
которой равна средней скорости в зоне ограничения. Ее параметры
могут быть определены следующим образом.
Если известна величина возможной скорости движения в зоне
собственно ограничения, то радиус эквивалентной кривой может
быть определен из формулы (3.43), полагая в ней коэффициент
поперечной силы ^ =
0,1
(при этом кривая не ощущается). Прини-
мая возможную скорость движения в зоне ограничения равной
скорости движения по эквивалентной кривой v
Kp
и зная скорость
движения вне зоны действия ограничения, то есть и
пр
, найдем
среднюю скорость движения по условной переходной кривой
« -^Р + ^Р
1ак как, в свою очередь, =;, то задавшись величиной
замедления (ускорения), найдем время движения t по условной
переходной кривой и далее из равенства
L
WJ)
ex
=
v
cv
t
получим
^пр "Т ^кр
m
^пр О
кр
V
П
р U
K
p
1 "ТТ"
•^nepex Q ; о ; V*
•*•*•}
Для определения полной длины эквивалентной кривой необхо-
димо к длине действия собственно ограничения добавить удвоен-
ную длину переходной кривой.
Рассчитанные указанным путем параметры эквивалентных кри-
вых могут быть использованы для определения показателя помехо-
насыщенности дороги (маршрута) в плане, наряду с параметрами
реальных кривых.
Замена действительных ограничений скорости эквивалентными
кривыми с целью использования при расчетах движения общего
измерителя помехонасыщенности К позволяет значительно упрос-
тить эти расчеты, но вместе с тем вносит некоторую неточность в их
результаты, поскольку эквивалентные кривые являются условными
и «движение» по ним не связано с дополнительными затратами
мощности.
4.3,
Моделирование и типизация условий движения
Если дорога (сеть дорог) имеет большую длину, то для снижения
трудоемкости расчетов движения ее целесообразно заменить соот-
ветствующим аналогом (моделью). Возможность такой замены
обусловлена тем, что при большой длине дороги составляющие
ее элементы и ограничения скорости многократно повторяются.
98
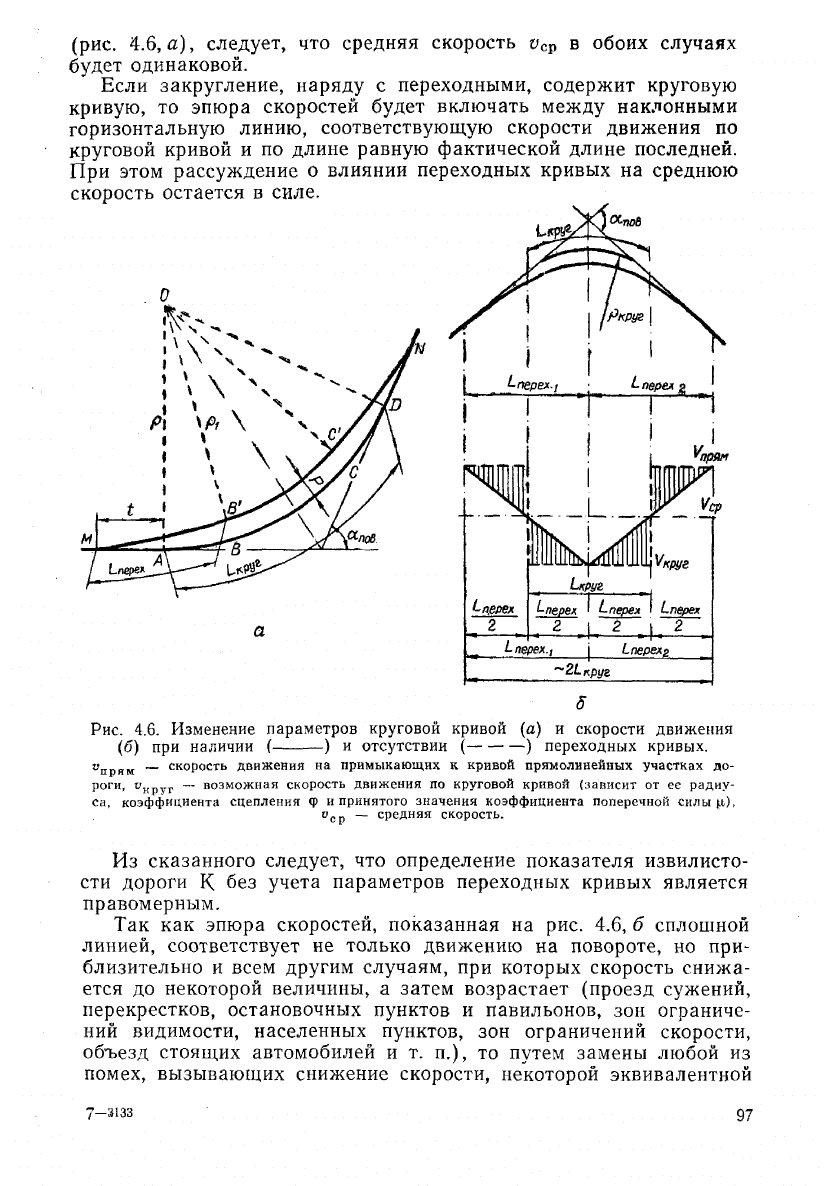
Рассмотрим порядок моделирования продольного профиля
ДОрОГИ.
При свободном движении по дороге, на которой кроме подъемов
и спусков нет никаких других помех движению, средняя скорость
является функцией двух случайных аргументов: сопротивления
дороги i£ и длины отрезков дороги с постоянным сопротивлением /.
Так как для определения математического ожидания этой функции.
IL
«Д^^Э i рте*
0,16
0,1
0,3
0,2
0,1
т
SSS
и
200 400 600 600
1000 1200 1400
Длина уклонов, I,*С
-56 -46 -40 -32 -24 -16 -Q0 6
-ГГП-т-ГГе^-гШ ^Gfa
16 24 32 40 46 56
Уклоны %о
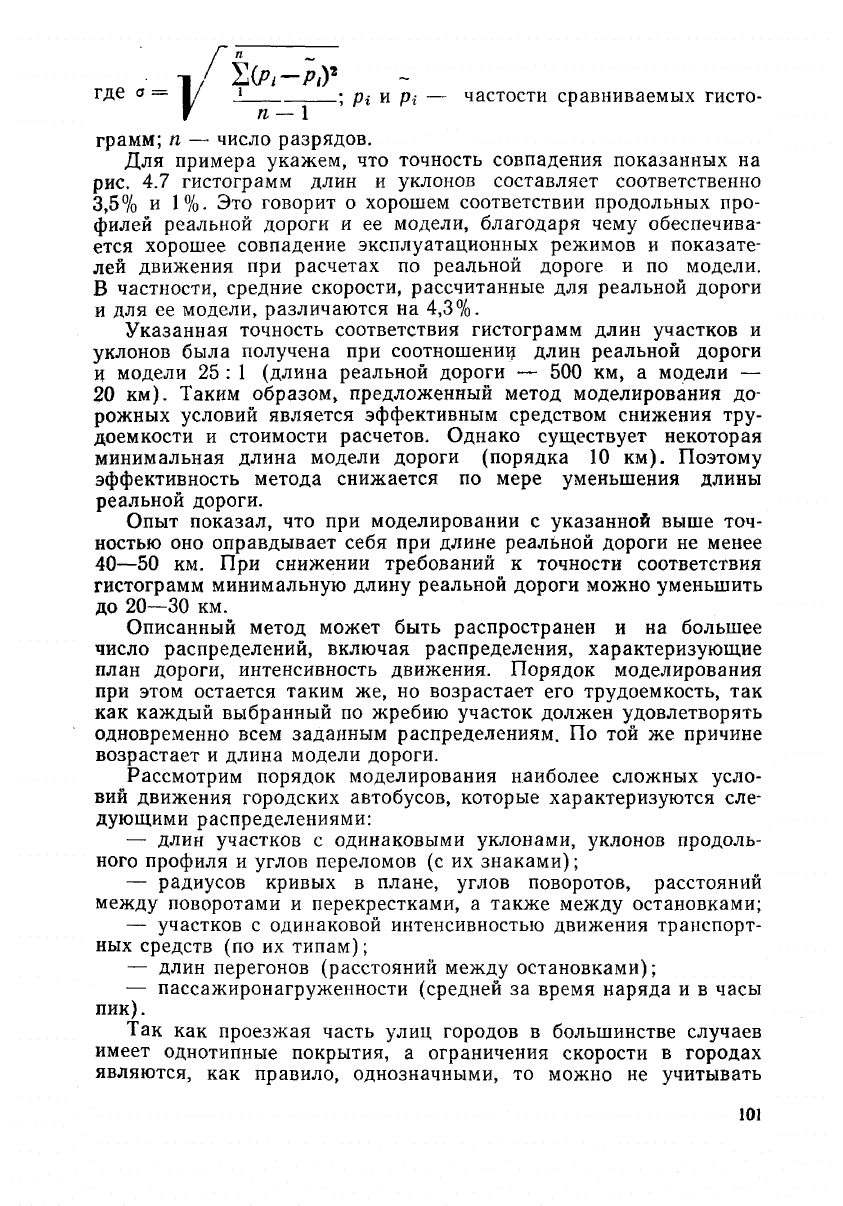
Рис. 4.7. Гистограммы распределения длин участков и уклонов реальной до-
роги (Р) длиной 500 км и ее модели (Ш) длиной 20 км.
достаточно знать закон распределения аргументов [14], то, имея
в виду, что встреча участка реальной дороги с уклоном щ, длиной
U
является случайной для конструирования аналога этой дороги, то
есть ее модели, следует использовать метод статистических испы-
таний (Монте-Карло). Для реализации этого метода применитель-
но к решаемой задаче составим гистограмму распределения длин
и уклонов участков реальной дороги. На рис. 4.7 представлены
гистограммы распределения уклонов и длин для одной из дорог
общей длиной около 500 км *. Отметим, что распределение уклонов
и длин весьма приближенно, а в ряде случаев с большими откло-
нениями может быть выражено аналитически с помощью известных
" -I
На рис. 4.7 незаштрихованные столбики относятся к реальной дороге,
а заштрихованные — к модели. При совпадении частостей для реальной дороги
н для модели столбики заштрихованы.
7*
99
распределений. Представленное на рис. 4.7 распределение уклонов
не следует нормальному закону, так как частости уклонов по-
рядка 30, 40, 50 и 60°/оо равны или даже больше, чем частости
уклонов меньшей величины. Плохо следуют известным распреде-
лениям и длины уклонов.
После построения гистограмм распределения уклонов и длин
каждому участку реальной дороги присваивается порядковый но-
мер.
Затем, пользуясь таблицей случайных чисел для равномерного
распределения, выбирают участки реальной дороги, то есть моде-
лируют случайные события А (уклон) и В (длину). При этом
возможными исходами совместных испытаний А*
1
и В
1
будут
А
Л
Ф,
A
a
iB
l
i> А*1в\А
а
'Ж*, (4.13)
где Л
а
* — «не Л"
1
' », В ' — «не В <», то есть не происходят, так
как не удовлетворяют требованиям.
В ходе моделирования проверяется выполнение следующих
условий:
P"i<P"j »
p'lKP'l
(4.14)
где PI и Pj — частости появления событий Л
а
' и Л ' на реаль-
ной дороге;
Р*£
и PJ — то же на моделируемой дороге.
При выполнении условий (4.14) полагаем, что события А*
1
и
В
1
произошли.
Практически моделирование продолжается до тех пор, пока
частости появления событий Л
а/
и В
1
на реальной и на моделируе-
мой дорогах не будут соответствовать друг другу с заданной точ-
ностью, то есть пока не будут удовлетворяться требования
\П~П\<*>
1^-^|<е.
(4.15)
Модель дороги конструируется путем последовательного рас-
положения участков, удовлетворяющих указанным требованиям.
В результате получим некоторый продольный профиль, который
затем сглаживается с помощью вертикальных кривых. Последние
вводятся из условия обеспечения видимости в соответствии с тех-
нической категорией реальной дороги общепринятым при проекти-
ровании дорог методом.
Для сокращения длины модели целесообразно при больших
уклонах брать сравнительно малые длины участков, то есть не-
сколько корректировать случайное распределение.
Так как последовательность расположения участков модели
является случайной, то при их перестановке гистограммы распре-
деления уклонов и длин не изменятся и при любом варианте будут
удовлетворять распределению этих величин на реальной дороге
с заданной точностью, которая определяется по формуле
8о= 0"|/п 100, %, (4.16)
100
•_
л
/Ш-~РР
где о
—
•/ j • р
{
и pi — частости сравниваемых гисто-
V п — \
грамм; п — число разрядов.
Для примера укажем, что точность совпадения показанных на
рис.
4.7 гистограмм длин и уклонов составляет соответственно
3,5%
и 1%. Это говорит о хорошем соответствии продольных про-
филей реальной дороги и ее модели, благодаря чему обеспечива-
ется хорошее совпадение эксплуатационных режимов и показате-
лей движения при расчетах по реальной дороге и по модели.
В частности, средние скорости, рассчитанные для реальной дороги
и для ее модели, различаются на 4,3%.
Указанная точность соответствия гистограмм длин участков и
уклонов была получена при соотношении длин реальной дороги
И модели 25 : 1 (длина реальной дороги — 500 км, а модели —
20 км). Таким образом» предложенный метод моделирования до-
рожных условий является эффективным средством снижения тру-
доемкости и стоимости расчетов. Однако существует некоторая
минимальная длина модели дороги (порядка 10 км). Поэтому
эффективность метода снижается по мере уменьшения длины
реальной дороги.
Опыт показал, что при моделировании с указанной выше точ-
ностью оно оправдывает себя при длине реальной дороги не менее
40—50 км. При снижении требований к точности соответствия
гистограмм минимальную длину реальной дороги можно уменьшить
до 20—30 км.
Описанный метод может быть распространен и на большее
число распределений, включая распределения, характеризующие
план дороги, интенсивность движения. Порядок моделирования
при этом остается таким же, но возрастает его трудоемкость, так
как каждый выбранный по жребию участок должен удовлетворять
одновременно всем заданным распределениям. По той же причине
возрастает и длина модели дороги.
Рассмотрим порядок моделирования наиболее сложных усло-
вий движения городских автобусов, которые характеризуются сле-
дующими распределениями:
— длин участков с одинаковыми уклонами, уклонов продоль-
ного профиля и углов переломов (с их знаками);
— радиусов кривых в плане, углов поворотов, расстояний
между поворотами и перекрестками, а также между остановками;
— участков с одинаковой интенсивностью движения транспорт-
ных средств (по их типам);
— длин перегонов (расстояний между остановками);
— пассажиронагруженности (средней за время наряда и в часы
пик).
Так как проезжая часть улиц городов в большинстве случаев
имеет однотипные покрытия, а ограничения скорости в городах
являются, как правило, однозначными, то можно не учитывать
101