Методическое пособие
Подождите немного. Документ загружается.

В.В. Кибардин
Теория автоматического
управления
Лабораторный практикум
1
Министерство образования и науки РФ
Федеральное агенство по образованию
Государственное образовательное учреждение
высшего профессионального образования
Сибирский федеральный университет
Институт горного дела, геологии и геотехнологий
В.В. Кибардин
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Лабораторный практикум
Красноярск, 2008
2
УДК 621.311.:622
К 38
Кибардин В.В. Теория автоматического управления:
Лабораторный практикум. СФУ, ИГД, Г и Г.- Красноярск, 2008.
В пособии приведены методические указания по выполнению
лабораторных работ по дисциплине “Теория автоматического
управления”.
Для студентов горно-металлургических вузов, обучающихся по
специальности 140604 ‘Электропривод и автоматика промышленных
установок и технологических комплексов’, может быть использована
студентами других специальностей, изучающих курсы ТАУ и ‘Основы
электропривода’.
3
ВВЕДЕНИЕ
Все лабораторные работы выполняются в трех программных средах:
EWB 5.12, MATLAB и MathCAD.
При наборе электронных моделей типовых звеньев в среде EWB5.12
необходимо соблюдать следующие правила: входные сопротивления
операционных усилителей принимать равными 100 кОм; на первом
операционном усилителе собирается передаточный коэффициент
Rвх
Roc
k
;
напряжение на выходе любого операционного усилителя не должно
превышать 10 В; частотные характеристики снимаются с помощью
генератора синусоидальных сигналов, амплитуда синусоиды не более 1-2 В,
частота любая; при работе с двухканальным осциллографом необходимо
изменять развертку и усиление входного канала. Операционный усилитель
имеет два входа – инвертирующий (-) и не инвертирующий (+), последний
должен быть заземлён. Выходной сигнал по знаку должен совпадать с
входным сигналом, поэтому электронная модель любого звена содержит не
менее двух операционных усилителей.
Частота среза
CP
– это частота, на которой ЛАЧХ равна нулю.
Фаза среза – это разность начальных фаз входного и выходного
сигналов на частоте среза.
Частота
- это частота, на которой ЛФЧХ равна
.
Лабораторная работа №1
4
Динамические звенья систем автоматического управления
Цель работы: исследование статических и динамических свойств
звеньев систем автоматического управления с помощью пакетов прикладных
программ EWB 5.12, MATLAB и MathCAD.
Моделирование звеньев в среде EWB 5.12
Исследование апериодического звена первого порядка
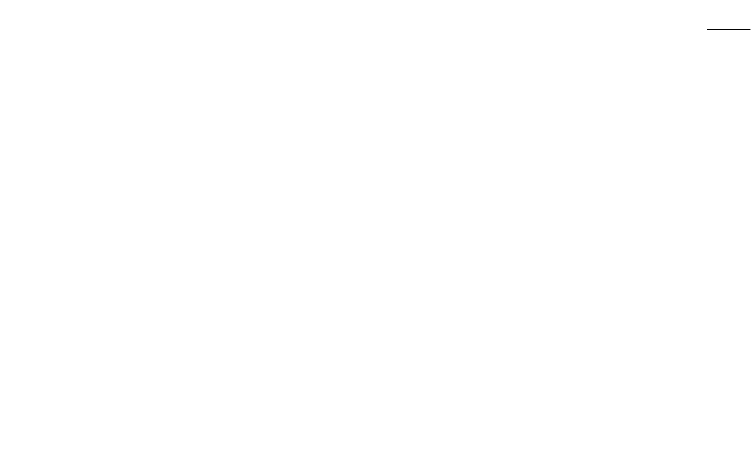
Передаточная функция звена W(p) = k/(Tp + 1), его электронная
модель в EWB 5.12 представлена на рис. 1.
Рис. 1
На операционном усилителе У1 собрано пропорциональное (без
инерционное) звено с коэффициентом передачи k = R2/R1; на операционном
усилителе У2 - апериодическое звено первого порядка с постоянной времени
T = R4*C1. Сопротивления R1 = R3 = 100 кOм
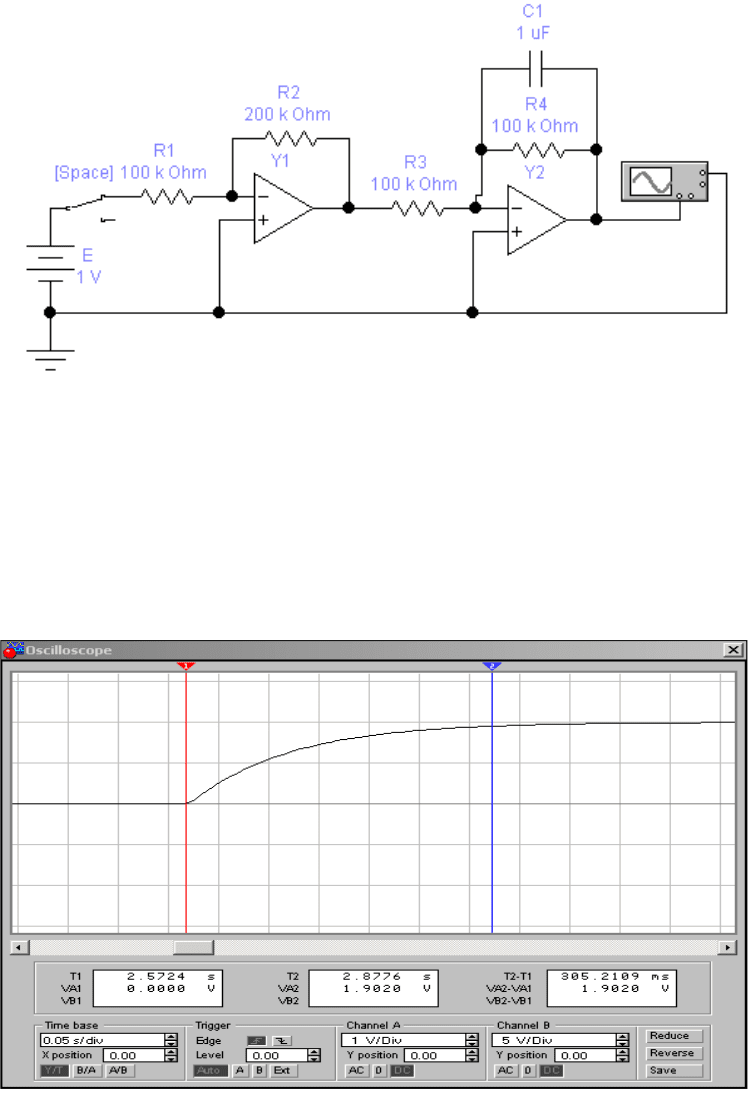
В соответствии с номером варианта (табл. 1) рассчитать параметры
элементов электронной модели, снять переходные характеристики при Т, 2Т,
3Т, 4Т и определить время переходного процесса t
ПП
при ∆ = ± 5% (рис. 2).
Рис. 2
Таблица 1
5
№ 1 2 3 4 5 6 7 8 9 10
k 10 3 8 5 6 7 4 9 2 1
T, мс 100 30 80 50 60 70 40 90 20 10
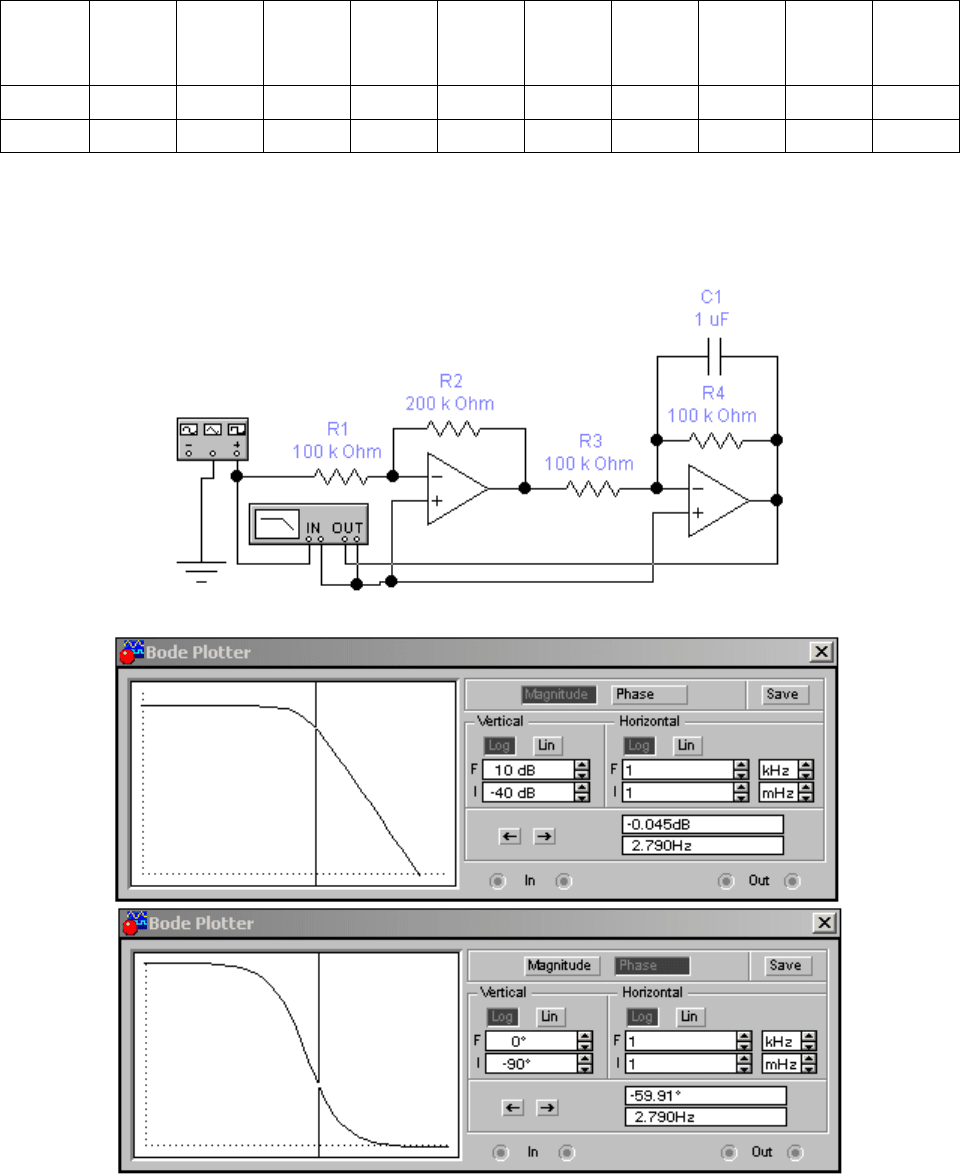
По схеме рис. 3 снять логарифмические амплитудную L(ω) и фазовую
частотные φ(ω) характеристики (рис. 4), определить частоту среза ω
СР
и
значение фазы среза φ
СР
на этой частоте.
Рис. 3
Рис. 4
По результатам эксперимента построить зависимости t
ПП
= f(T), ω
СР
=
f(T), φ
СР
= f(T).
6
Исследование апериодического звена второго порядка.
Передаточная функция звена
.1
2
21
;221;2*1
,
12
)12)(11(
)(
22
T
TT
TTTTTT
TppT
k
pTpT
k
pW
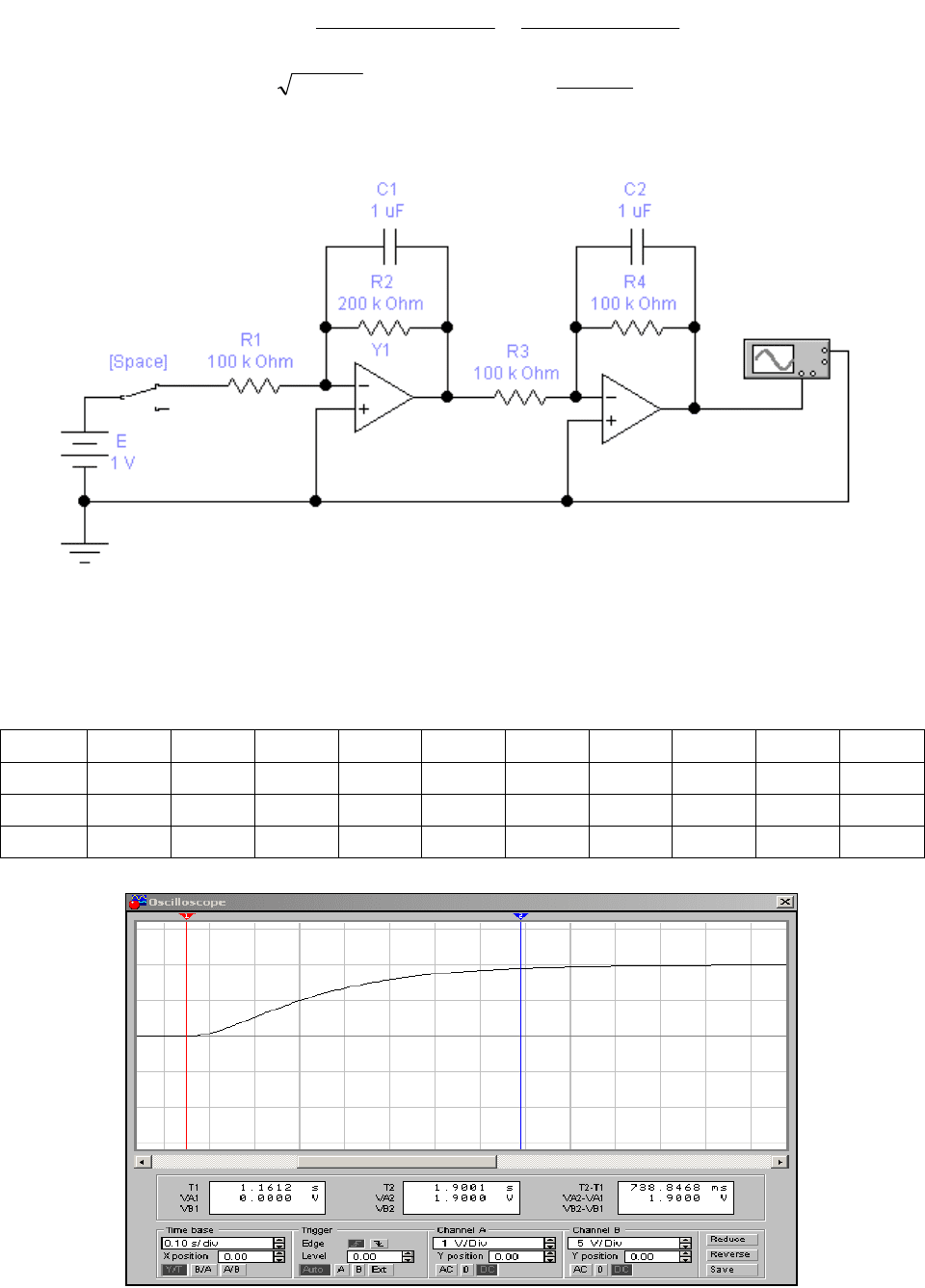
Это последовательное соединение двух апериодических звеньев первого
порядка, электронная модель приведена на рис. 5
Рис. 5
В соответствии с номером варианта (табл. 2) рассчитать параметры
элементов электронной модели: k = R2/R1; C1 = T1/R2; C2 = T2/R4; R1 = R3
= R4 = 100 кОм и определить время переходного процесса (рис. 6).
Таблица 2
№ 1 2 3 4 5 6 7 8 9 10
k 10 11 8 13 16 15 14 17 12 9
T1,мс 100 10 80 30 60 50 40 70 20 90
T2,мс 10 2 8 6 10 15 8 14 4 16
7
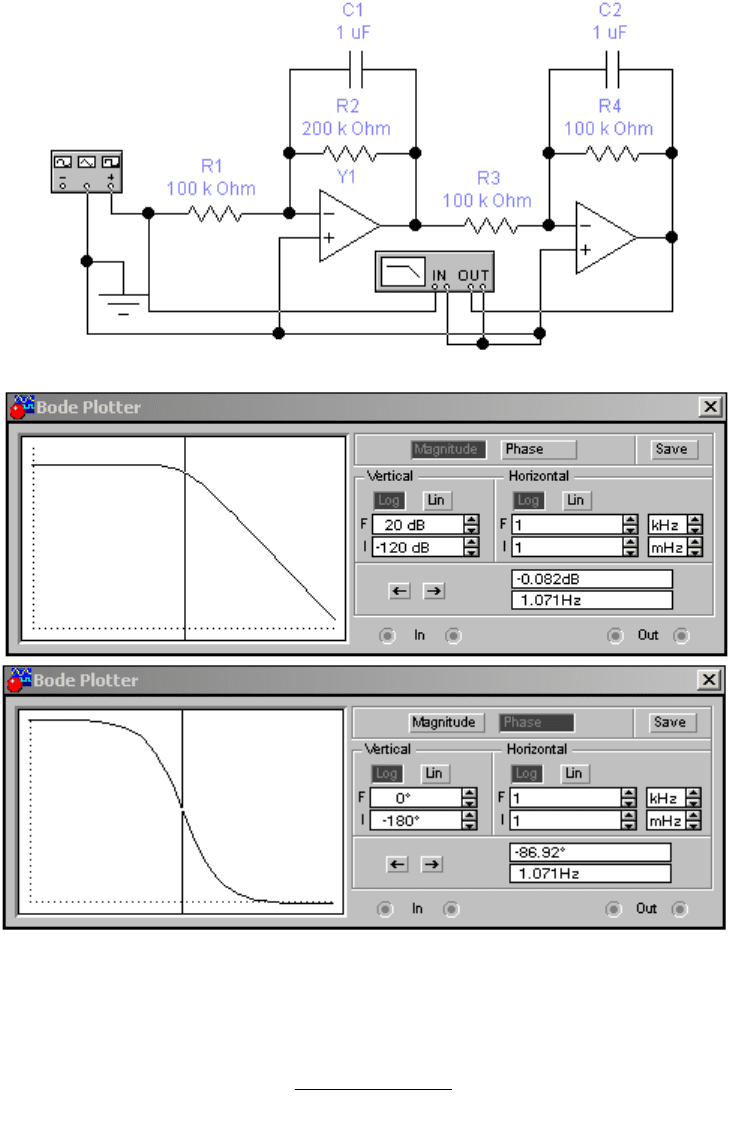
Рис. 6
По схеме рис. 7 снять логарифмические амплитудную L(ω) и фазовую
частотные φ(ω) характеристики (рис. 8), определить частоту среза ω
СР
и
значение фазы среза φ
СР
на этой частоте. Сравнить полученный результат с
предыдущими данными.
Рис. 7
Рис. 8
Исследование колебательного звена.
Передаточная функция звена
,1,
12
1
)(
22
TppT
pW
где ξ – коэффициент демпфирования. Звено можно рассматривать как
последовательное соединение апериодического звена первого порядка с
передаточной функцией W(p) = k/(T1p + 1) и идеального интегрирующего
звена с передаточной функцией W(p) = 1/T
И
р, охваченных единичной
8
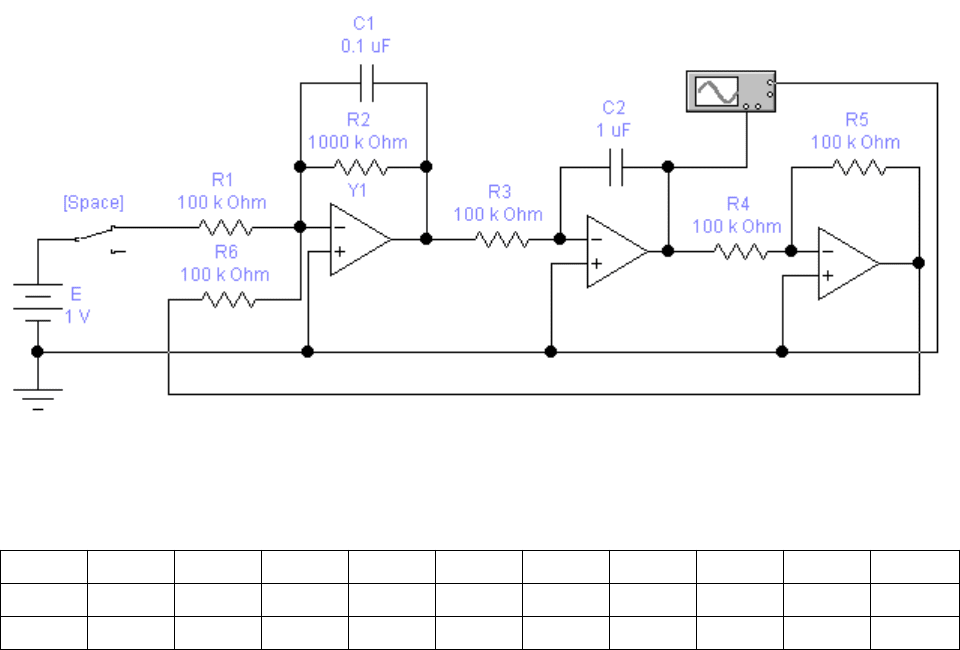
отрицательной обратной связью (рис. 9). Здесь Т
И
– время изодрома; Т
И
=
2ξТk; T1 = kT
2
/T
И
.
Рис. 9
При моделирование считать, что R1 = R3 = R5 = R6 = R7 = 100 кОм.
Исходные данные для моделирования приведены в табл. 3.
Таблица 3
№ 1 2 3 4 5 6 7 8 9 10
k 2 3 4 5 4 3 2 3 4 5
T,мс 20 25 30 25 20 15 20 25 30 15
Параметры остальных элементов схемы рассчитать по формулам:
R2 = k*R1; Т
И
= 2ξТk; C2 = T
И
/R3; T1 =kT
2
/T
И
; C1 = T1/R2.
Снять переходные характеристики звена (рис. 10) при ξ = 0.25; 0.5;
0.707 и 1.0. Зафиксировать максимальное Um и установившееся Uу значения
выходного сигнала. Определить время переходного процесса tпп.
9
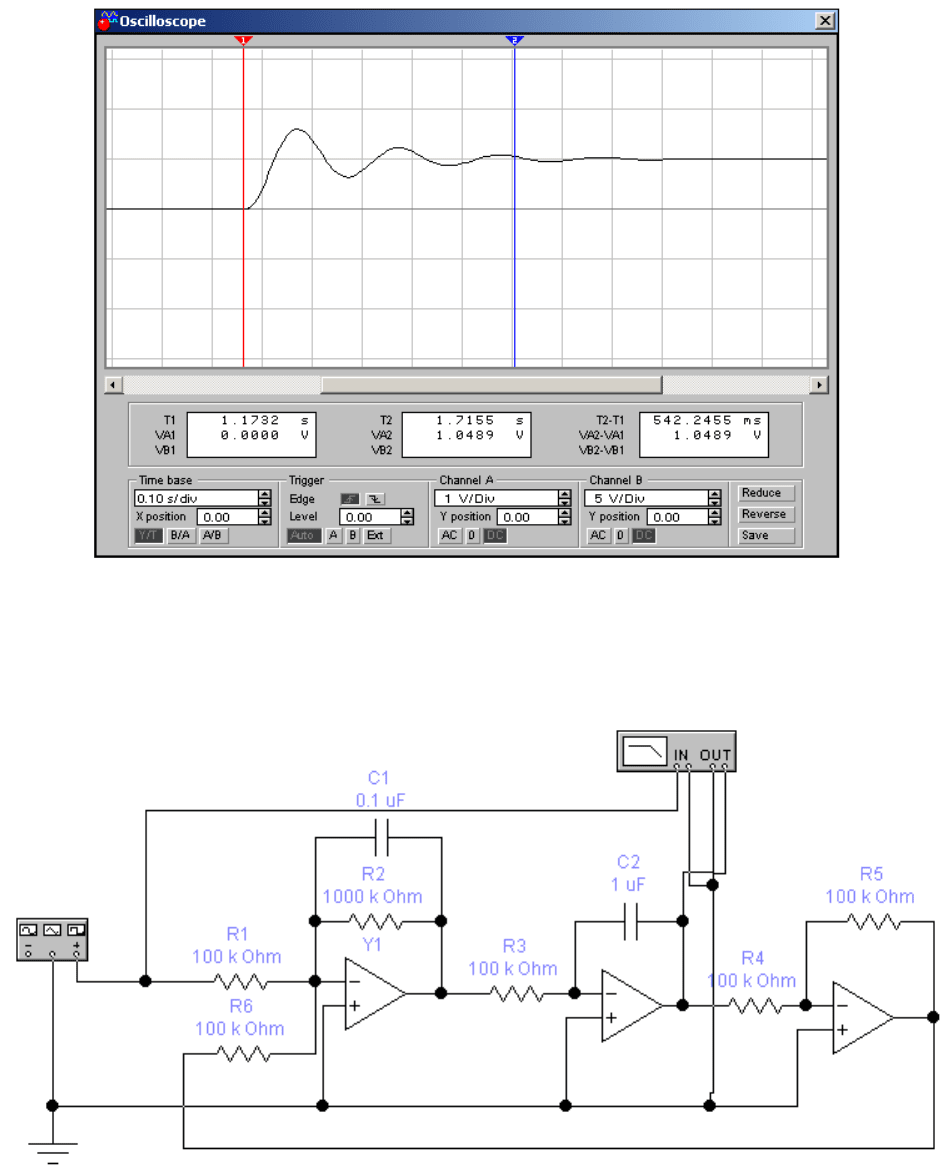
Рис. 10
По схеме рис. 11 снять логарифмические амплитудную L(ω) и фазовую
частотные φ(ω) характеристики (рис. 12), определить частоту среза ω
СР
,
значение фазы среза φ
СР
на этой частоте, запас устойчивости по амплитуде
∆G и фазе ∆φ.
Рис. 11
10