Методическое пособие
Подождите немного. Документ загружается.

выбрать структуру и настроечные параметры регулятора. Регулятор должен
обеспечить плавный переходный процесс и нулевую статическую ошибку.
Объект управления – тиристорный преобразователь и якорь двигателя
постоянного тока с независимым возбуждением – представлен двумя
апериодическими звеньями первого порядка. Параметры звеньев приведены
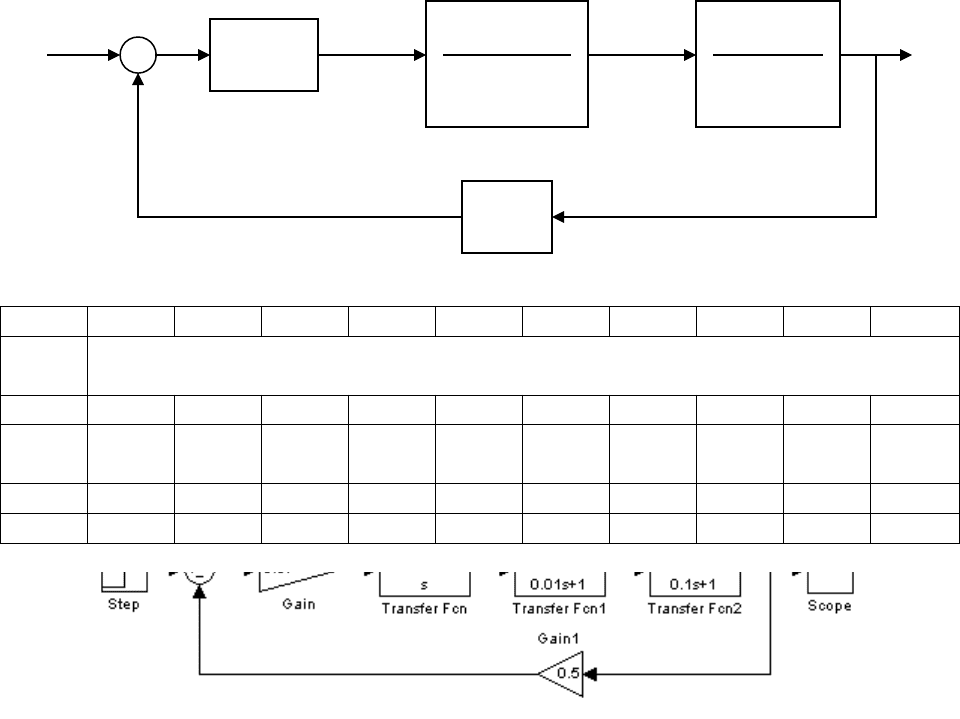
в таблице 1. Структурная схема набора в MATLAB приведена на рис. 2.
U
РС
к
ТП
1/R
Я∑
I
Я
W
РТ
(р)
_ Т
ТП
р + 1 Т
Я
р + 1
U
ДТ
к
ДТ
Рис. 1
Таблица 1.
№ 1 2 3 4 5 6 7 8 9 10
Ттп,
с
0.01
Ктп 12 13 14 15 16 17 18 19 20 21
Rя,
Ом
0,123 0,256 0,175 0,152 0,381 0,481 0,272 0,301 0,368 0,436
Тя, с 0,085 0,076 0,058 0,064 0,071 0,08 0,049 0,055 0,061 0,074
Кдт 0,1 0,11 0,15 0,18 0,17 0,12 0,16 0,13 0,14 0,19
Рис. 2
Снять переходные характеристики САУ при а
М
= 1, 2 и 4 и определить
время регулирования при 5% отклонении выходной координаты от
установившегося значения. Рассчитать в MathCAD показатели качества
управления (время переходного процесса, перерегулирование), построить
логарифмические (амплитудную и фазовую) частотные характеристики и
определить запасы устойчивости по амплитуде и фазе и сравнить
полученные результаты.
Изменить один из параметров объекта управления на ±20% и снять
кривые переходных процессов (или рассчитать их в MathCAD). Определить
время переходного процесса и перерегулирование. Выполнить анализ
полученных результатов.
1.3. Для системы управления, представленной на рис. 3, необходимо
выбрать структуру и настроечные параметры регулятора. Регулятор должен
обеспечить плавный переходный процесс и нулевую статическую ошибку.
Объект управления – апериодическое звено первого порядка (коэффициент
передачи 1/Кдт , постоянная времени 2Т
ТП
) и интегрирующее звено с
61

постоянной времени Тм = 1,2*Тя. Остальные параметры приведены в
таблице 2.
1 / к
ДТ
f R
Я
к
Д
Хвх(р) - - Хвых(р)
2 Т
ТП
р + 1 Т
М
р
к
ДС
Рис. 3
Таблица 2
№ 1 2 3 4 5 6 7 8 9 10
R
Я
,
Ом
0,164 0,047 0,234 0,148 0,237 0,179 0,128 0,108 0,218 0,257
Кдc 1,38 1,54 1,12 1,44 1,23 1,65 1,83 1,98 1,76 1,84
Снять переходные характеристики САУ при 20% изменении расчётных
значений параметров регулятора и f = const. Определить перерегулирование
и время регулирования при 5% отклонении выходной координаты от
установившегося значения. Сравнить полученные результаты с
предыдущими.
2. Критерий симметричного оптимума (СО)
Рассмотрим систему, состоящую из ПИ – регулятора, апериодического
звена первого порядка с постоянной времени Т
m
и передаточным
коэффициентом к, интегрирующим звеном с большой постоянной времени
Т
0
(Т
0
>>4Tμ) и звеном обратной связи к
ос
.
По условиям структурной устойчивости замкнутой системы нельзя
использовать ПИ – регулятор (
рТр
рTи
pWp
*
*1
)(
) с настройкой Ти = Тμ,
полностью компенсирующей единственную постоянную времени
(получается идеальное колебательное звено).
Из уравнения
W
з
(р) = W(р)/[1 + W(p)]
следует, что передаточная функция замкнутого контура никогда не равна
единице во всём спектре частот сигнала. Для того, чтобы АЧХ (чётная
функция частоты) контура была как можно ближе к единице и более плоской,
необходимо, чтобы производные dA
2
(
)/d
n
® 0 при
® 0. Критерий
симметричного оптимума требует такого выбора постоянной времени
контурного регулятора, при котором выполняется это требование.
Из равенства нулю чётных производных в соответствии с числом
определяемых параметров
dA
2
(
)/d
2
= 0; dA
2
(
)/d
4
= 0
следует, что Т
и
= 4Т
m
и Т
р
= 8Т
2
m
кк
ос
/Т
0
.
62
Аналогичный результат получается, если потребовать, чтобы
амплитудная частотная характеристика рассматриваемой системы
соответствовала амплитудной частотной характеристике фильтра
Баттерворта третьего порядка
А
2
Б
(
) = 1 / [1 + (T
)
6
].
Характеристический полином замкнутого контура системы
А
з
(р) = (Т
0
Т
р
Т
m
/кк
ос
)р
3
+ (Т
0
Т
р
/кк
ос
)р
2
+ Т
и
р + 1.
Нормированный полином Баттерворта представим в виде
А
БСО
(р) = (1/а
3
)р
3
+ (2/а
2
)р
2
+ (2/а)р + 1.
По условиям симметричного оптимума требуется, чтобы Т
и
= 4Т
m
.
Из равенства коэффициентов при р и р
2
характеристического и
нормированного полиномов получаем
4Т
m
= 2/а ; а = 0,5Т
m
; Т
0
Т
р
/кк
ос
= 8Т
2
m
и Т
р
= 8Т
2
m
кк
ос
/Т
0
.
При расчёте контура по условиям симметричного оптимума
возмущающее воздействие принимают равным нулю. В этом случае
передаточная функция контура при выбранных настройках получается в виде
W
ЗАМСО
(р) = (4Т
m
р + 1) / (8Т
3
m
р
3
+ 8Т
2
m
р
2
+ 4Т
m
р + 1),
а разомкнутого контура
W
РСО
(р) = (4Т
m
р + 1) / [8Т
2
m
р
2
(Т
m
р + 1)].
Время достижения первого установившегося значения равно 3,1Т
m
, а
наличие в числителе передаточной функции контура форсирующего члена
обуславливает большое перерегулирование (до 43%) выходной величины при
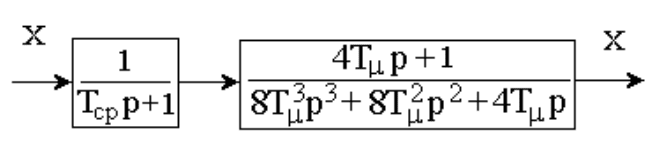
единичном изменении входного сигнала. Для устранения этого недостатка в
цепь входного сигнала контура включают фильтр первого порядка (рис. 4) с
передаточной функцией
W
ф
(р) = 1/ (Т
ф
р + 1), Т
ф
= 4Т
m
.
Рис. 4
При этом время регулирования возрастает примерно в 2,3 раза, а
динамическая ошибка по возмущению уменьшается.
При настройке контура, состоящего из двух апериодических звеньев
с постоянными времени Т
0
и Т
m
и суммарным коэффициентом передачи к, на
СО параметры ПИ – регулятора определяются по формулам
к
р
= Т
0
/(2кТ
m
); Т
и
= 4Т
m
.
Передаточная функция разомкнутого контура
63

W
РСО
(р) = Т
0
(4Т
m
р + 1)/ [8Т
2
m
р(Т
0
р + 1)(Т
m
р + 1)].
Если Т
0
4Т
m
, то
W
РСО
(р)
(4Т
m
р + 1)/ [8Т
2
m
р
2
(Т
m
р + 1)].
При этом передаточные функции замкнутого контура по
управляющему и возмущающему воздействиям соответственно будут
W
ЗАМСО
(р) = (4Т
m
р + 1)/ [(2Т
m
р + 1)(4Т
2
m
р
2
+ 2Т
m
р + 1)];
W
ВСО
(р) = [8Т
2
m
р(Т
m
р + 1)]/ [Т
0
(2Т
m
р + 1)(4Т
2
m
р
2
+ 2Т
m
р + 1)].
Если рассматривать знаменатель как характеристическое уравнение
звена второго порядка, то
= 0,5.
Логарифмическая амплитудная частотная характеристика
разомкнутого контура имеет наклоны –40, –20, –40 и расположена
симметрично относительно частоты среза (рис. 5), поэтому критерий и
получил название симметричного оптимума.
Рис. 5
2.1. Для системы управления, представленной на рис. 6, выбрать
f
Хвх(р) к 1 Хвых(р)
- Wp(p) -
Т1р + 1 Тор
Кос
Рис. 6
структуру и рассчитать параметры регулятора в соответствии с требованиями
симметричного оптимума. Снять кривые переходных процессов при
изменении задания и нагрузки. Определить время переходного процесса и
перерегулирование. Рассчитать в MathCAD частотные характеристики
разомкнутой системы и переходную функции. Определить показатели
64

качества управления (время переходного процесса, перерегулирование, запас
устойчивости по фазе и амплитуде). Сравнить полученные результаты.
Параметры структурной схемы (рис. 6, 7) приведены в таблице 3.
Таблица 3
№ 1 2 3 4 5 6 7 8 9 10
К 5,5 6,2 4.7 6,9 7,3 8,4 9,3 8,6 6,4 9,9
Кос 0,06 0,05 0,08 0,09 0,085 0,07 0,065 0,092 0,078 0,055
Т1, с 0,02 0,03 0,035 0,025 0,04 0,06 0,055 0,065 0,045 0,05
То, с 0,82 0,78 0,74 0,97 0,58 0,67 0,87 0,93 0,68 0,48
Рис. 7
2.2. Включить на вход системы фильтр (рис. 8) и повторить п. 2.1.
Рис. 8
2.3. Для системы управления, представленной на рис. 9, выбрать структуру и
К1 К2
- Wр(р) -
Т1р +1 Тор + 1
Кос
Рис. 9
рассчитать параметры регулятора в соответствии с требованиями СО. Снять
кривые переходных процессов при изменении задания и нагрузки.
Определить время переходного процесса и перерегулирование. Рассчитать в
MathCAD частотные характеристики разомкнутой системы и переходную
65

функции. Определить показатели качества управления (время переходного
процесса, перерегулирование, запас устойчивости по фазе и амплитуде).
Сравнить полученные результаты.
3. Критерий компромиссного оптимума (КО)
Анализируя настройки на МО и СО для одного и того же объекта,
следует отметить, что первая настройка является оптимальной по
быстродействию при управляющем воздействии, вторая настройка – при
возмущающем воздействии, в особенности при больших значениях
постоянной времени объекта Т
0
, например электромеханической постоянной
времени привода. Вместе с тем настройка на ОМ дает в этих условиях при
возмущающем воздействии затянутый переходный процесс, длительность
которого пропорциональна Т
0
. Настройка на СО, в свою очередь, дает
неблагоприятный переходный процесс при управлении по заданию. Кроме
того, указанные настройки весьма чувствительны к изменению параметров
объекта регулирования, в особенности настройка на СО, имеющая
относительно небольшой запас устойчивости.
В связи с изложенным возникает задача такой коррекции контура, при
которой его динамические характеристики стали бы оптимальными как по
управлению, так и по возмущению при малой чувствительности к вариации
параметров объекта.
Рассмотрим систему, состоящую из ПИ – регулятора, инерционного
звена первого порядка с параметрами к, Т
m
, интегрирующего звена с большей
постоянной времени Т
0
, на входе которого возможно появление
возмущающих воздействий f и корректирующего устройства КУ (рис.10).
КУ
Wk(p)
Хвх(р) To 4Tμp+1 k f 1 Хвых
- - -
2kTμ 4Tμ p Tμ p+1 To p
Рис. 10
Параметры регулятора выбраны из условия СО, т.е.
Т
И
= 4Т
m
; к
р
= Т
0
/2кТ
m
.
Передаточная функция разомкнутого контура
W
РСО
(р) = Т
0
(4Т
m
р + 1)/[8Т
2
m
р
2
(Т
m
р + 1)].
66
При этом передаточные функции по заданию и возмущению
соответственно будут
W
ЗХСО
(р) = (4Т
m
р + 1)/[(2Т
m
р + 1)(4Т
2
m
р
2
+ 2Т
m
р + 1)];
W
ЗZСО
(р) = 8Т
2
m
р(Т
m
р + 1)/[Т
0
(2Т
m
p + 1)(4Т
2
m
р
2
+ 2Т
m
р + 1)].
Если 4Т
2
m
= Т
2
; 2Т
m
= 2Т, то = 0,5.
Переходный процесс, как известно, характеризуется большим
перерегулированием (до 43%) и длительностью при управлении по заданию.
Поэтому можно реализовать встречно - параллельную коррекцию звеном
W
К
(р) (рис. 10), предъявив к системе в целом требования МО. Тогда
требуемая передаточная функция корректирующего звена
W
К
(р) = Т
0
(Т
m
р + 1)/4кТ
m
,
а передаточная функция разомкнутого контура
W
р
(р) = 1/ [2Т
m
р(Т
m
р + 1)].
Передаточная функция замкнутого контура по возмущению
W
ЗZ
(р) = 8Т
2
m
р(Т
m
р + 1)/[Т
0
(4Т
m
р + 1)(2Т
2
m
р
2
+ 2Т
m
р + 1)].
Логарифмическая амплитудная частотная характеристика этого
контура имеет тип –1, –2, –1, –2, а сам контур обладает большей
устойчивостью (по сравнению с нескорректированным). Тем самым
обеспечивается меньшая чувствительность динамики контура к изменению
параметров Т
0
, Т
m
, к.
Если недопустимо перерегулирование, то используют линейный
оптимум. Суть этого метода заключается в уменьшении в два раза
коэффициента передачи регулятора к
Р
по сравнению с МО и СО.
3.1. Для одного и того же объекта (см. рис. 10) выбрать структуру и
рассчитать параметры регуляторов в соответствии с критериями модульного,
симметричного и компромиссного оптимумов. Определить передаточные
функции по заданию и возмущению. Построить в MathCAD
логарифмические частотные характеристики (амплитудную и фазовую) и
определить запас устойчивости по амплитуде и фазе (для случая
компромиссного оптимума). Принять Т
μ
= Т1.
Пример структурной схемы для проведения эксперимента в MATLAB
приведён на рис. 11.
Результаты всех экспериментов свести в таблицу и сделать вывод о
целесообразности применения того или иного критерия.
67
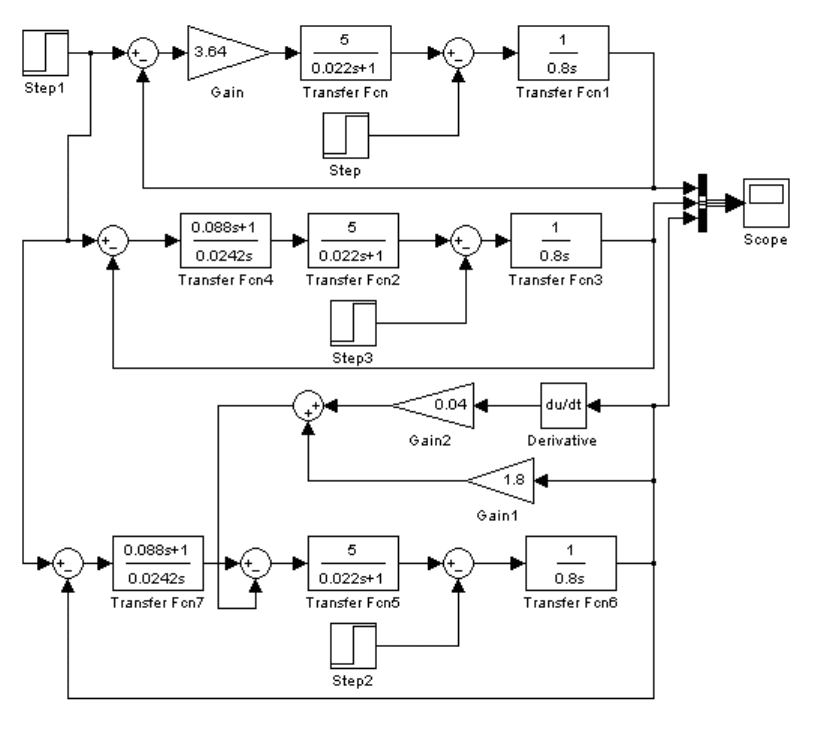
Рис. 11
Контрольные вопросы.
Объясните смысл запасов устойчивости по амплитуде и фазе. Как эти
показатели связаны с переходными характеристиками замкнутой системы.
При синтезе каких систем рекомендуется применять критерии МО, СО
и КО? Ограничения, существующие при синтезе корректирующих устройств
на основании этих критериев.
Почему при выборе корректирующего устройства на основании
критерия СО возникает большое перерегулирование при изменения задания?
С помощью какого технического устройства устраняется этот недостаток?
В чём разница между статическими и астатическими системами?
Как влияют свойства обратной связи на показатели качества
управления?
68
Лабораторная работа №5
Синтез регуляторов методами модального управления
Цель работы: выбрать структуру и рассчитать параметры
регулятора методом модального управления
Введение
Нули и полюсы передаточных функций линейных стационарных
систем или собственные числа соответствующих матриц играют большую
роль при описании их статических и динамических свойств. При этом метод
синтеза, обеспечивающий заданное распределение корней
характеристического уравнения замкнутой системы управления на
комплексной плоскости, получил название метода стандартных
коэффициентов. Сюда же можно отнести и методы синтеза, основанные на
частотных характеристиках и корневом годографе. Эти методы обычно
называют классическими или традиционными. Отличительной особенностью
этих методов является грубость, что означает нечувствительность
характеристик замкнутой системы к небольшим изменениям её параметров.
В основу методов положена информация о передаточной функции и
частотных характеристиках рассматриваемой системы.
В последние годы разработаны новые методы синтеза, которые
принято называть методами современной теории управления. Они в большей
степени зависимы от точности модели системы. Рассмотрим один из них,
основанный на переменных состояния.
Пусть модель объекта задана в переменных состояния
dx / dt = Ax + Bu;
y = Cx.
Здесь х – вектор состояния размерности n 1, компонентами
которого являются переменные состояния системы n-го порядка; А –
матрица состояния (n
n); В – матрица входа (n
m), где m – число
управляющих воздействий; u – вектор входа размерности (m
1),
компонентами которого являются входные переменные системы; y – вектор
выходных переменных размерностью р
1, где р – число выходных
переменных; C – матрица выхода (p
n),
Требуется найти управление
u = – К x,
69

такое, чтобы все или часть собственных чисел (мод) матрицы А – ВК
замкнутой системы имели заданные значения или принадлежали заданному
множеству.
Действительно, уравнение замкнутой системы
dx / dt = Ax + Bu = ( А – ВК ) х = Н х
и её характеристическое уравнение
det [pI – A + BK ] = 0.
Управление, основанное на применении алгебры собственных чисел
передаточных матриц линейных стационарных систем, называется
модальным управлением. Вектор К есть вектор постоянных коэффициентов
размерностью m
n .
Задача синтеза заключается в определении желаемого положения
корней характеристического уравнения замкнутой системы (рис. 1) и
нахождении коэффициентов обратных связей К
ij
, обеспечивающих заданное
размещение корней.
Рис. 1
Можно
предположить, что вход системы равен нулю. Тогда и
выходная величина должна быть равна нулю. На практике система
подтверждена влиянию возмущений, которые стремятся сделать выход
объекта отличным от нуля. Цель обратной связи по переменным состояния –
вернуть значения выходной переменной и всех переменных состояния к
нулю заданным образом. Система такого типа при нулевом или постоянном
входном сигнале называется регулятором состояния.
При этом возникает необходимость измерения всех или почти всех
переменных состояния. Те переменные, которые не могут быть измерены
непосредственно, подлежат оценке на основании измеряемых переменных.
Системы используют обратную связь по состоянию и синтез регуляторов
связан с понятиями наблюдаемость и управляемость.
Говорят, что система, описываемая матрицами (А, В) называется
управляемой, если существует такое неограниченное управление u, которое
70