Методическое пособие
Подождите немного. Документ загружается.


переворота фазы ωπ
, запас устойчивости по амплитуде ∆G и фазе ∆φ.
Результаты эксперимента сравнить с предыдущими и свести в таблицу.
3.3. Моделирование в MATLAB.
Для исследования системы управления в MATLAB необходимо в
соответствии с данными варианта набрать следующие операторы ( после >>)
>> wf=tf([0.5],[0.001 1])
Transfer function:
0.5
-----------
0.001 s + 1
>> w1=tf([2],[0.012 1])
Transfer function:
2
-----------
0.012 s + 1
>> w2=tf([1.5],[0.04 1])
Transfer function:
1.5
----------
0.04 s + 1
>> wk3=tf([3.178])
Transfer function:
3.178
>> woc=([1])
woc =
1
>> wrx=wf*w1*w2*wk3*woc
Transfer function:
4.767
-----------------------------------------
4.8e-007 s^3 + 0.000532 s^2 + 0.053 s + 1
>> bode(wrx)
51
>> wr=wf*w1*w2*wk3
Transfer function:
4.767
-----------------------------------------
4.8e-007 s^3 + 0.000532 s^2 + 0.053 s + 1
>> wzx=feedback(wr, woc, -1)
Transfer function:
4.767
---------------------------------------------
4.8e-007 s^3 + 0.000532 s^2 + 0.053 s + 5.767
>> pole(wzx)
ans =
1.0e+003 *
-1.0109
-0.0487 + 0.0975i
-0.0487 - 0.0975i
>> step(wzx)
В среде MATLB + Simulink создать структурную схему замкнутой
системы управления (рис. 20) и снять кривые переходных процессов при
различных значениях Т1ф. Сравнить полученные кривые с
экспериментальными и расчётными.
52
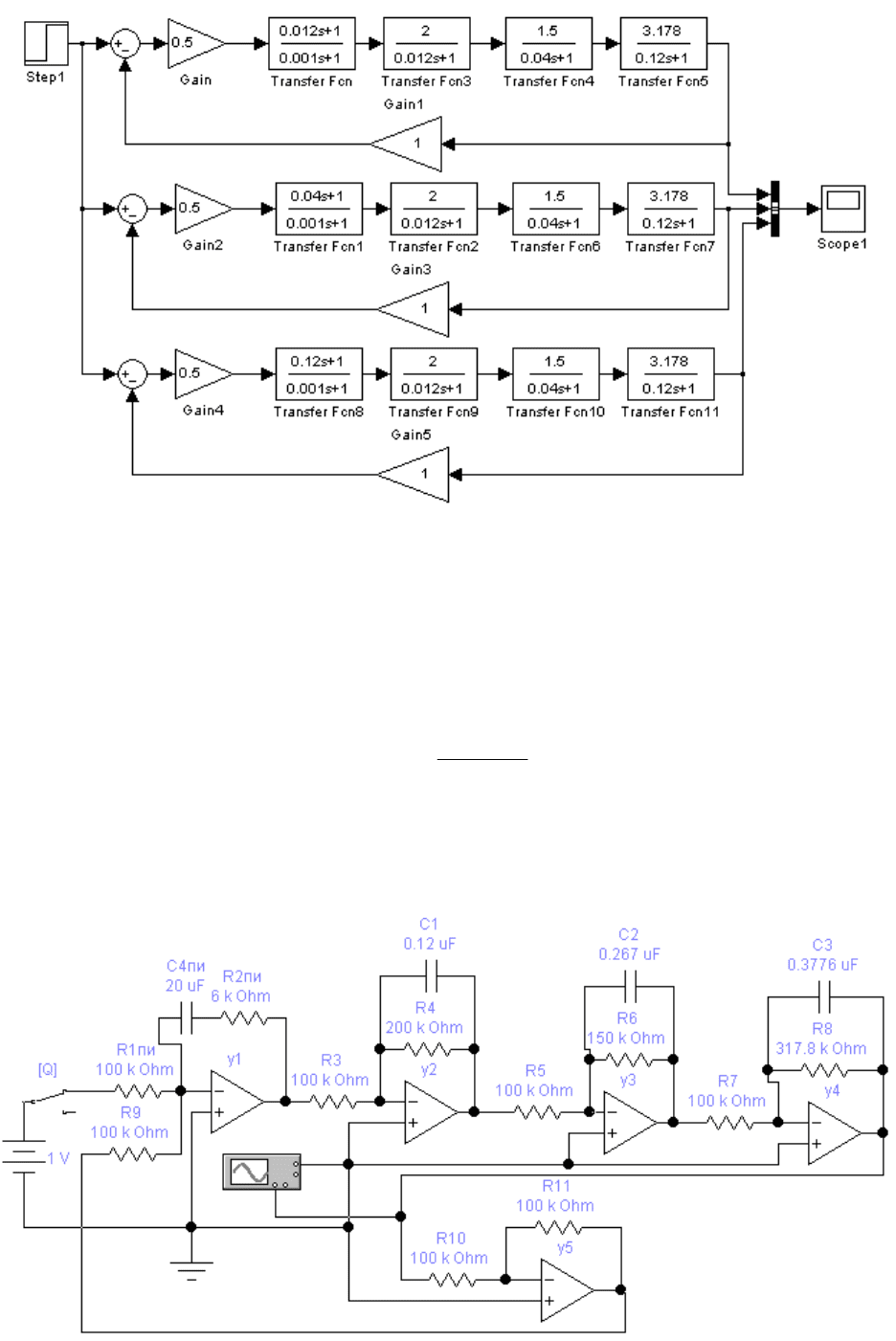
Рис. 20
4. Исследование статических и динамических свойств замкнутой
системы управления с ПИ - регулятором
4.1 Моделирование в EWB 5.12
Передаточная функция ПИ – регулятора
,
*
1*
)(
рT
рTи
pW
P
где Т
Р
= 1/K
P
- постоянная регулятора, Ти – время изодрома. При
моделировании принять К
Р
= 0.5. Электронная модель системы представлена
на рис. 21, в которой модель регулятора собрана на усилителе у1. Значения
С4пи и R2пи рассчитываются по формулам: С4пи =Т
Р
/R1пи; R2пи =Ти/С4пи.
Рис. 21
53

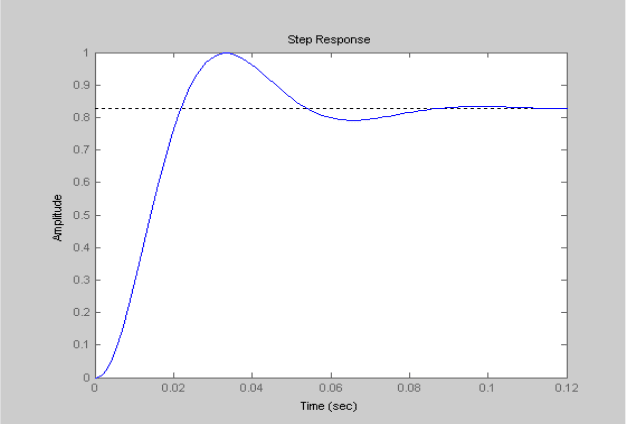
Снять переходные (рис. 22) и частотные характеристики (рис. 23, 24)
системы управления для Ти = Т1, Т2 и Т3. Определить время переходного
процесса, перерегулирование, ошибку, частоту среза ω
СР
, значение фазы
среза на этой частоте φ
СР
, частоту переворота фазы ωπ
, запас устойчивости
по амплитуде ∆L и фазе ∆φ. Результаты эксперимента сравнить с
предыдущими и свести в таблицу.
Рис. 22
Рис. 23
54

Рис. 24
4.2. Моделирование в MathCAD
Определить передаточные функции разомкнутой и замкнутой систем
управления. Рассчитать временные и частотные характеристики системы.
Учесть, что введение ПИ – регулятора с постоянной Ти компенсирует
соответствующую постоянную апериодического звена объекта управления.
Определить время переходного процесса, перерегулирование, ошибку,
частоту среза ω
СР
, значение фазы среза на этой частоте φ
СР
, частоту
переворота фазы ωπ
, запас устойчивости по амплитуде ∆L и фазе ∆φ.
Результаты эксперимента сравнить с предыдущими и свести в таблицу.
55
4.3. Моделирование в MATLAB.
Этот пункт выполнить аналогично п. 3.3.
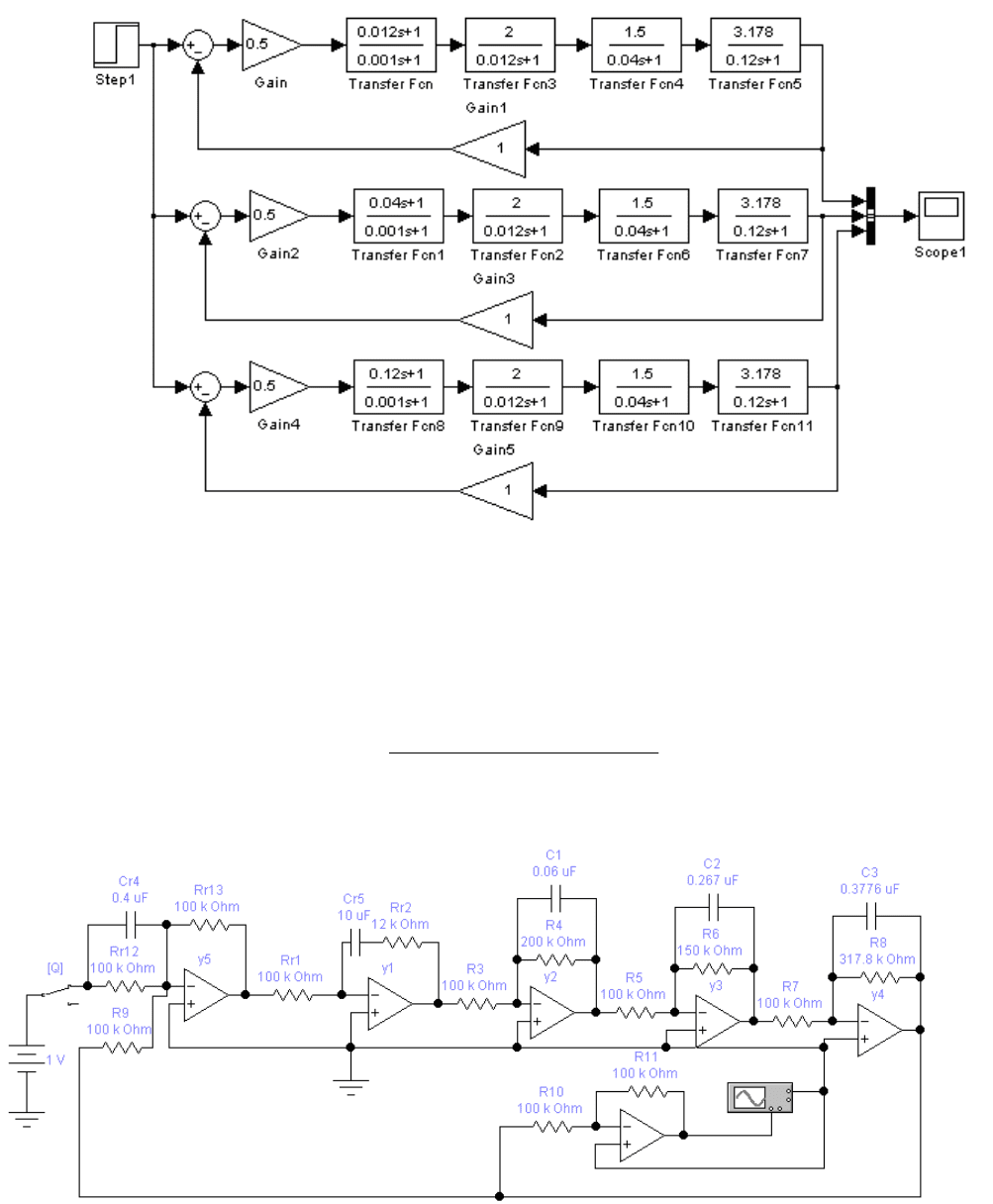
В среде MATLB + Simulink создать структурную схему замкнутой
системы управления (рис. 25) и снять кривые переходных процессов при
различных значениях Т1ф. Сравнить полученные кривые с
экспериментальными и расчётными.
Рис. 25
5. Исследование статических и динамических свойств замкнутой
системы управления с ПИД - регулятором
5.1 Моделирование в EWB 5.12
Передаточная функция ПИД – регулятора
рpT
рpТppT
kppW
*3
)1*2(*)1*1(
*)(
реализована на усилителе у5 и у1 электронной модели системы управления
(рис. 26).
Рис. 26
56

Такая структура регулятора в соответствии с принципом компенсации
позволяет компенсировать две наибольшие постоянные времени объекта
управления – Т2 и Т3. При исследовании свойств ПИД – регулятора
необходимо принять Т1р = Т2, Т2р = Т3, Т3р = 1с, Rr1 = Rr12 = 100 кОм.
Значения элементов схемы регулятора рассчитываются по формулам:
.
12
13
;
12
1
4;
5
2
2;
1
3
5
Rr
Rr
kp
Rr
pT
Cr
C
pT
R
Rr
pT
Cr
При kp = 1 снять переходную (рис. 27) и частотные характеристики
(рис. 28, 29) системы с ПИД – регулятором. Определить время переходного
процесса, перерегулирование, ошибку, частоту среза ω
СР
, значение фазы
среза на этой частоте φ
СР
, частоту переворота фазы ωπ
, запас устойчивости
по амплитуде ∆G и фазе ∆φ. Повторить опыты для kp = 2.5 и 4. Результаты
экспериментов свести в таблицу.
Рис. 27
Рис. 28
57
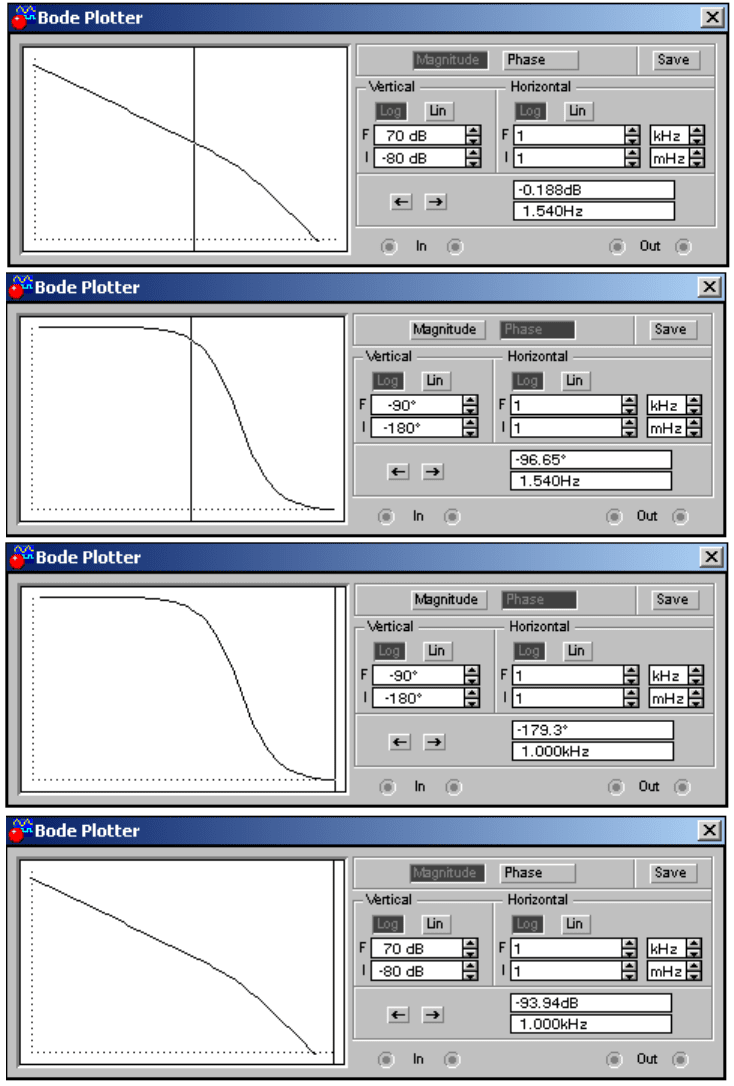
Рис. 29
5.2. Моделирование в MathCAD
Определить передаточные функции разомкнутой и замкнутой систем
управления. Рассчитать временные и частотные характеристики системы.
Учесть, что введение ПИД – регулятора компенсирует две постоянные
времени объекта управления.
Определить время переходного процесса, перерегулирование, ошибку,
частоту среза ω
СР
, значение фазы среза на этой частоте φ
СР
, частоту
переворота фазы ωπ
, запас устойчивости по амплитуде ∆L и фазе ∆φ.
Результаты эксперимента сравнить с предыдущими и свести в таблицу.
58

5.3. Моделирование в MATLAB.
В пакете MATLAB + Simulink имеется PID - Controller, передаточная
функция которого равна
,)( Ds
s
I
PpWpid
где Р – пропорциональная часть, I/s – интегральная часть и Ds –
дифференциальная часть. Его можно создать также из соответствующих
стандартных звеньев библиотеки Simulink.
Сравнение с регулятором в EWB приводит к следующим равенствам:
kp=I=1; kp*T1p*T2p = P= 0.16; kp*T1p*T2p=D =0.0048.
В среде MATLB + Simulink создать структурную схему замкнутой
системы управления (рис. 30) и снять кривые переходных процессов при
различных значениях kp. Сравнить полученные кривые с
экспериментальными и расчётными.
Контрольные вопросы
Что является основными статическими и динамическими
характеристиками объекта управления и системы управления в целом?
Почему нужна коррекция статических и динамических свойств объекта
управления?
Дайте характеристику и сравнительную оценку основных видов
коррекции.
Дайте характеристику типовых алгоритмов управления и типовых
корректирующих устройств (регуляторов).
Приведите примеры частотных характеристик типовых регуляторов.
С помощью каких корректирующих устройств можно устранить
статическую ошибку по заданию или возмущению?
59
Лабораторная работа №4
Синтез корректирующих устройств по критериям
модульного, симметричного и компромиссного оптимумов.
Цель работы: выбрать структуру и настроечные параметры регулятора
в соответствии с заданным критерием качества. Оценить “грубость”
выбранных корректирующих устройств по отношению к изменяющимся
параметрам объекта управления.
1. Критерий модульного оптимума (МО)
Критерий технического (амплитудного, модульного) оптимума МО
обеспечивает выбор параметров регулятора на основании следующих
требований к форме АЧХ замкнутой системы: характеристика в рабочем
диапазоне частот должна соответствовать АЧХ идеального фильтра нижних
частот, имеющему, как известно, прямоугольную частотную характеристику.
Наиболее близкую по форме к прямоугольной АЧХ имеет фильтр
Баттерворта, у которого
А
Б
(
) =
W
Б
(j
)
= 1/sqrt[1 + (
T)
2 n
].
Нетрудно убедиться, что колебательное звено второго порядка
W(p) = 1/(T
2
p
2
+ 2
Tp + 1)
при коэффициенте демпфирования =
2
/2 имеет АЧХ
А(
) = к/sqrt(1 + T
4
4
),
соответствующую частному случаю фильтра с n = 2. Переходный процесс
является оптимальным по длительности (имеет наименьшее время
регулирования t
p
3T), а максимальный выброс меньше 0,05к (или 0,05кА
при А 1).
Разомкнутый контур, настроенный на технический оптимум, имеет
передаточную функцию
1
W
МО
(р) = ,
а
М
Т
μ
р (Т
μ
р + 1)
где а
М
= 2 – стандартный коэффициент настройки, Т
μ
– наименьшая
постоянная времени контура. На практике этот коэффициент берётся в
диапазоне 0,5 ≤ а
М
≤ 4. Уменьшение значения а
М
по сравнению со
стандартным снижает запас по фазе и, следовательно, повышает
перерегулирование. Например, при а
М
= 1 (квадратичный оптимум) запас по
фазе ∆φ = 45
0
, время переходного процесса уменьшается, а
перерегулирование возрастает. При а
М
= 4 имеем пограничный
апериодический режим, запас по фазе ∆φ = 81
0
, время переходного процесса
увеличивается до 16Т
μ
.
Структура и параметры регулятора определяются на основании
равенства
Wмо(s)=Wку(s)*Wp(s),
откуда
,
)(
(s)
(s)
sWp
Wмо
Wку
где Wку(s) – передаточная функция корректирующего устройства; Wp(s) –
передаточная функция разомкнутого контура системы управления.
1.2. Для системы управления, представленной на рис. 1, необходимо
60