Козлов В.Н., Куприянов В.Е., Шашихин В.Н. Управление энергетическими системами. Часть1. Теория автоматического управления
Подождите немного. Документ загружается.


2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
69
(2.42) для переменных
t
y
и
t
u
, получим уравнение
)()(
)()(
*
1
)1(
10
*
1
)1(
10
quBeBeBeB
qyAeAeAeA
g
q
g
gqqg
g
q
g
gqqg
⋅++++=
=⋅++++
−
−
−
−
или
)()()()(
**
quqBqyqA = ,
где )(q
A
и )(q
B
определяются следующими равенствами:
g
q
g
gqgq
AeAeAeAqA ++++=
−
−
1
)1(
10
)(
,
g
q
g
gqgq
BeBeBeBqB ++++=
−
−
1
)1(
10
)(
В результате можно получить изображение уравнений дис-
кретных объектов и систем в виде
)()()(
***
quqWqy =
, (2.45)
где
[]
)()()(
1
*
qBqAqW
−
= - передаточная матрица (функция) дис-
кретных объектов или систем.
Определение 2.6.3. Функция )(
*
qW в (2.45), связывающая
при нулевых начальных условиях дискретные изображения по
Лапласу выходных и входных переменных, называется
переда-
точной функцией (матрицей) дискретного объекта или сис-
темы
.
Переходя к
Z
-изображению в уравнении (2.44), получим
уравнение для изображений
)()()(
***
zuzWzy =
,
где )(),(
**
zuzy – Z-изображения выхода и входа;
70
[]
)()()(
1
*
zBzAzW
−
= – передаточная функция дискретной систе-
мы при использовании
Z
-преобразования.
Вычислив
Z
-преобразование уравнения состояний объекта
или системы (2.11) при нулевых начальных условиях, получим
)()()(,)()()(
******
zDuzCxzyzBuzAxzxz +=+= .
Исключение )(
*
zx из последнего уравнения, определяет соотно-
шения
)()()(
***
zuzWzy = ,
DBAzECzW
n
+−=
−
1*
)()(
,
где
)(
*
zW
– передаточная функция дискретноых объекта или
системы при использовании
Z
- преобразований.
2.6.3. Передаточные функции и матрицы импульсных
объектов и систем.
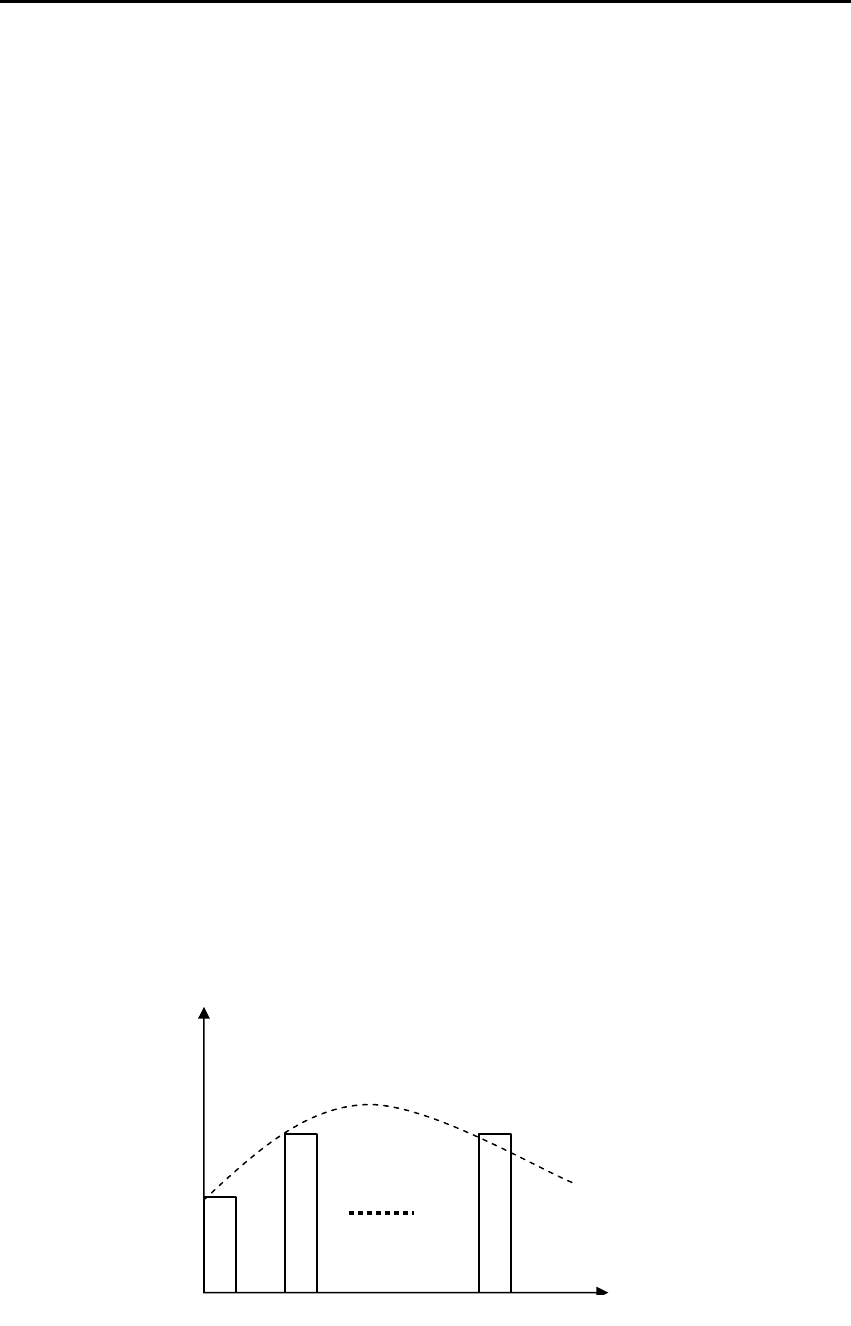
Объекты и САУ, в которых применяется им-
пульсная модуляция сигналов, будем называть импульсными
системами автоматического управления. Ограничимся рассмот-
рением
амплитудно-импульсной модуляции, при которой не-
прерывный сигнал
)(
t
f
заменяется последовательностью им-
пульсов, следующих друг за другом с постоянным интервалом
времени
T
(рис. 2.5). Амплитуды импульсов пропорциональны
Рис. 2.5. К амплитудно-импульсной модуляции сигналов
t
0
T
кТ
f(t)

2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
71
или равны значениям сигнала )(
t
f
в дискретные моменты време-
ни
k
T
t
= .
Модели импульсных элементов. Системы управления с
ЭВМ используют информацию и формируют управления в рав-
ноотстоящие моменты времени. При этом используется ряд мо-
делей импульсных элементов (ИЭ).
Пусть
)(
t
e – функция, описывающая форму одиночного
импульса, амплитуда которого равна единице. Тогда сигнал
)(
~
tf , получаемый в результате амплитудно-импульсной моду-
ляции сигнала
)(
t
f
, определится равенствами:
+−⋅+−⋅+⋅= )2()2()()()()0()(
~
TteTfTteTfteftf
,
∑
∞
⋅−=
=
0
)()()(
~
k
kTfkTtetf . (2.46)
Реальный импульсный элемент (ИЭ), описываемый уравнением
(2.46), представлен на рис.2.6 последовательным соединением
простейшего ИЭ и формирующего элемента (ФЭ).
1. Простейший импульсный элемент, отмеченный знаком
⊥, модулирует сигнал
)(
t
u
последовательностью
δ
-функций:
∑
∞
⋅−=
=
0
*
)()()(
k
kTukTttu
δ
. (2.47)
Рис. 2.6. Схема простейшего импульсного элемента
ФЭ
)(
*
tu
)(
~
tu
ИЭ
)(tu

72
Простейший ИЭ будем называть квантователем первого типа.
2. Квантователи с фиксатором. Формирующий элемент
(ФЭ) преобразует
δ
-импульсы в импульсы заданной формы e(t),
а выходной сигнал ИЭ имеет вид (2.46):
∑
∞
=
⋅−=
0
)()()(
~
k
kTukTtetu
.
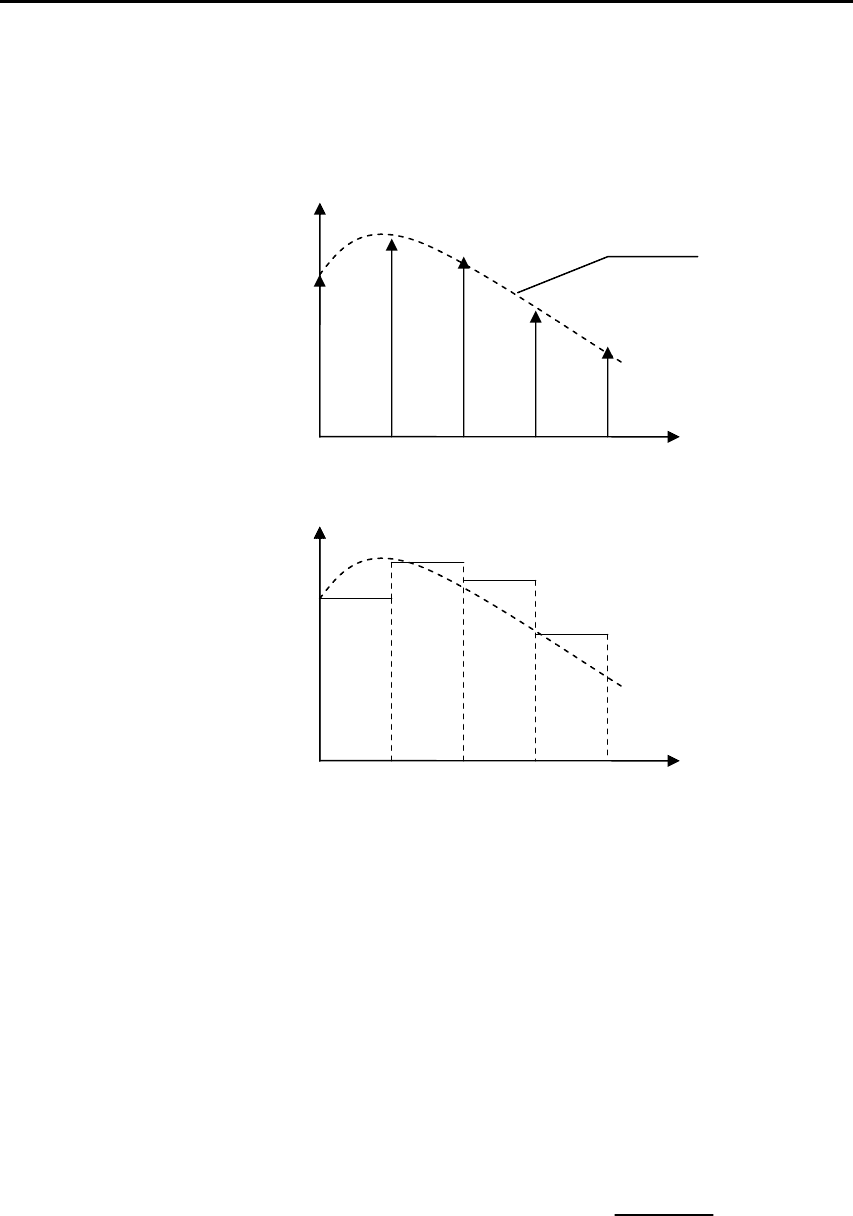
Рассмотрим часто используемый на практике вариант, при
котором сигнал на выходе ФЭ является кусочно-постоянным.
Импульсная переходная функция ФЭ определяется равенством:
)(1)(1)(
T
t
t
t
e −−= , а выходной сигнал – суммой единичных
функций различного аргумента:
[]
)())1((1)(1)(
~
0
kTuTktkTttu
k
⋅
∑
∞
+−−−=
=
.
Вид сигналов ИЭ представлен на рис. 2.7. Совокупность про-
стейшего ИЭ и ФЭ данного типа называют
квантователем
второго порядка
(квантователем с фиксатором).
Установим связь между обычным преобразованием Лапласа
и дискретным преобразованием для решетчатой функции (2.47).
При нулевых начальных условиях справедливо равенство:
() () ( ) ( )
()( ) ()
**
0
0
00
0
.
st
k
st kTs
kk
Lu t u s ukT t kT e dt
u kT t kT e dt u kT e
δ
δ
∞
∞
−
=
∞
∞∞
−−
==
⎡⎤
== ⋅−⋅=
⎣⎦
=−=
∑
∫
∑∑
∫
Если в полученное выражение подставить Tsq
=
и )(kTuu
k
= , то
окажется, что изображение по Лапласу функции, промодулиро-
2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
73
ванной
δ
-импульсами, совпадает с дискретным преобразованием
решетчатой функции
k
u
:
][)]([
*
k
uDLtuL = .
Рис. 2.7. Сигналы с квантованием второго порядка
Изображение выходного сигнала импульсного элемента оп-
ределяется равенством:
() ( ) ( ) ( )
()
()( ) ( )
()
()
0
0
00
0
111
1
[1 1 1 ] .
st
k
sT
st kTs
kk
us ukT t kT t k T e dt
e
ukT t kT t k T e dt ukT e
s
∞
∞
−
=
∞
−
∞∞
−−
==
⎡⎤
=⋅−−−+⋅=
⎣⎦
−
=−−−+⋅= ⋅
∑
∫
∑∑
∫
Передаточная функция фиксатора определяется равенством:
2T 3T 4T t
)(
*
tu
0 T 2T 3T 4T t
)(
~
tu
0 T
)(tu
74
)1(
11
)(
)(
~
)(
1
*
−
−
−=
−
== z
ss
e
su
su
sW
sT
ф
,
sT
ez
=
.
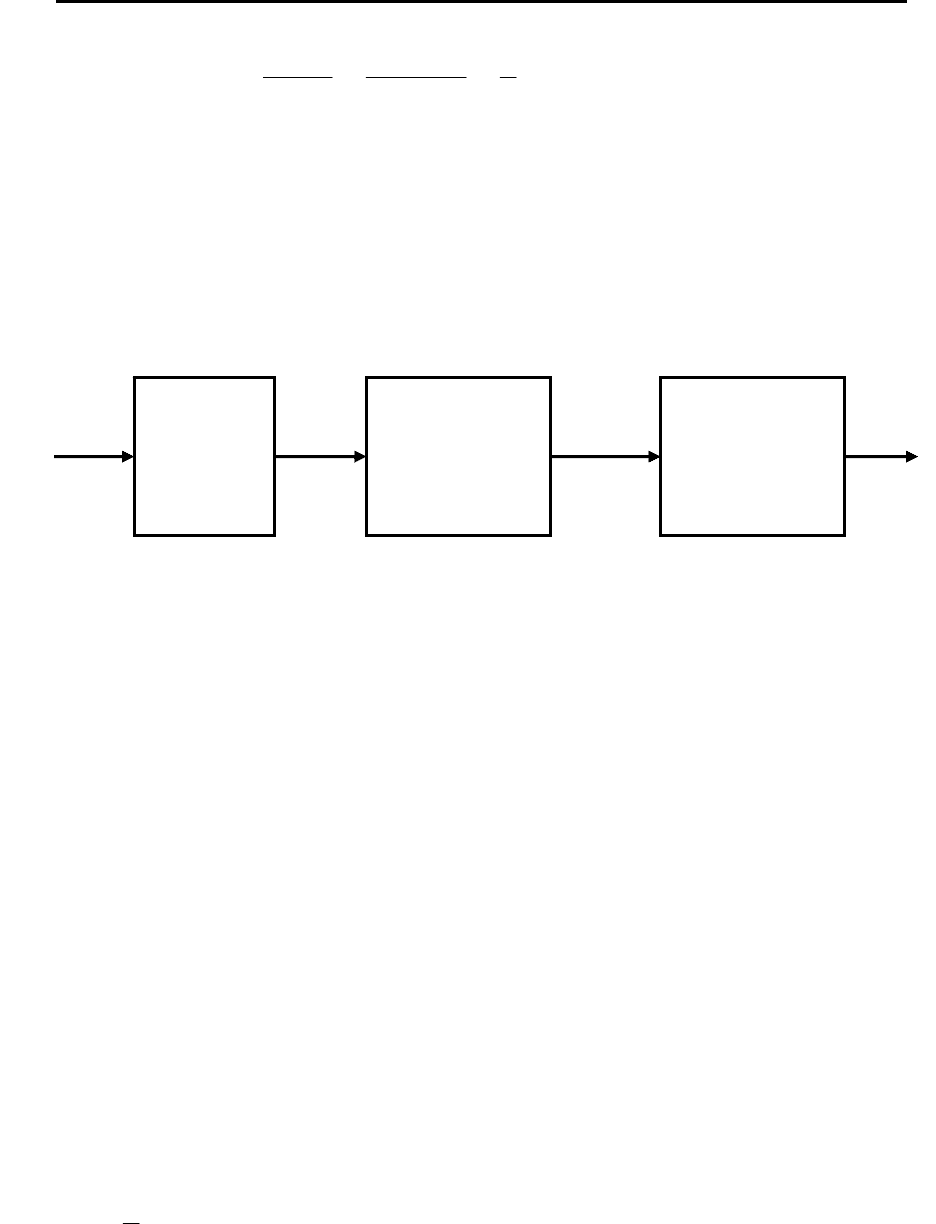
Обычно импульсная модуляция в системах управления осу-
ществляется управляющим устройством. Структурная схема ра-
зомкнутой импульсной системы (с квантованием по времени)
представлена на рис. 2.8.
Рис. 2.8. Структурная схема импульсной системы
Схема содержит ИЭ, линейную дискретную часть, отмеченную
передаточной функцией
)(
*
zW
д
, и линейную непрерывную часть с
передаточной функцией
()
н
Ws. Сигналы импульсной системы
имеют двойственный характер. С одной стороны, импульсным
элементом осуществляется преобразование непрерывного вход-
ного сигнала в моменты квантования
k
T
в дискретный сигнал.
Преобразование дискретного сигнала, определяемое передаточ-
ной функцией
)(
*
zW
д
, должно учитывать часть передаточной
функции фиксатора, задаваемой множителем
)1(
1−
− z . Другую
часть передаточной функции фиксатора, соответствующую мно-
жителю
s
1
, можно учесть в передаточной функции непрерывной
части системы
)(sW
н
. Если рассматривать все сигналы разомкну-
той системы только в моменты квантования, то выходной сигнал
ИЭ
)(
*
z
д
W
)(s
н
W
y(t
)
u
(t

2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
75
)(kTyy
k
=
можно определить как результат преобразования дис-
кретного входного сигнала
k
u системой с эквивалентной переда-
точной функцией
[
]
)()(
*
)(
*
s
н
WZz
д
Wz
экв
W ⋅= .
Процесс перевода передаточной функции аргумента s в пе-
редаточную функцию аргумента z
)]([)(
*
s
н
WZz
н
W = должен быть
выполнен так, чтобы импульсная переходная функция, соответ-
ствующая дискретной передаточной функции
)(
*
z
н
W , совпадала
со значениями импульсной переходной функции непрерывной
части системы
)(sW
н
в моменты квантования сигнала k
T
t
=
.
Процедура этого преобразования может быть выполнена сле-
дующим образом:
1). По передаточной функции
)(sW
н
определяется импульс-
ная переходная функция
)(
t
w ;
2). Вычисляется решетчатая функция
)(kTww
k
=
;
3). Строится Z-изображение
k
w и вычисляется требуемое
преобразование ][)]([
kн
wZsWZ
=
.
2.7. Частотные хар
актеристики
непрерывных объект
ов и систем
Частотные характеристики описывают свойства объектов
или систем управления в функции от одного параметра – часто-
ты. Частотные характеристики – это однопараметрическое семей-
ство комплексных чисел, когда параметр – частота.
2.7.1. Постановка задачи. Пусть объект или система управ-
ления описываются линейными скалярными или векторными

76
уравнениями «вход–выход»:
()
(
)
(
)
(
)
tupBtypA
=
, (2.48)
или уравнениями в пространстве состояний
0
)0(),()()(),()()( xxtuDtCxtytuBtxAtx =+=+=
. (2.49)
Требуется построить модели, связывающие реакции на входе и
выходе объекта или системы при гармонических входных воз-
действиях, на основе преобразования Фурье линейных моделей и
обобщенных функций, изучаемых в функциональном анализе.
2.7.2. Прямое и обратное преобразования Фурье. Рас-
смотрим определения и свойства преобразований.
Определение 2.7.1.
Если кусочно-непрерывная функция
)(
t
g
определена для
),(
∞
−
∞∈
t
и абсолютно интегрируемая, т.е.
выполнено условие
∫
∞
∞−
∞<= Mdttg )(
. (2.50)
Тогда существует прямое преобразование (изображение) Фурье
этой функции, определяемое соотношением:
∫
∞
∞
−
−
⋅== dt
tj
etgjGtgF
ω
ω
)()()]([ . (2.51)
Обратное преобразование Фурье (формула интеграла Фу-
рье) имеет вид:
∫
∞
∞
−
⋅=
−
ω
ω
ω
π
ω
d
tj
ejGjGF )(
2
1
)]([
1
. (2.52)

2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
7
7
Прямое преобразование Фурье преобразует функцию аргу-
мента t в функцию комплексного аргумента jω. Изображение по
Фурье
)]([)(
t
f
F
j
G
=
ω
функции
)(tf
характеризует спектраль-
ный состав функции и его называют
спектральной плотностью
или спектральной характеристикой функции
)(tf
.
Преобразование Фурье можно рассматривать как частный
случай преобразования Лапласа
при s = jω, то для отыскания
изображений по Фурье уравнений или координат объекта и сис-
темы можно воспользоваться данными таблицы изображений по
Лапласу, если
)(
t
g
отвечает требованиям к прообразам Фурье-
изображений.
Использование свойств
δ
-функции Дирака позволяет найти
спектральную характеристику для некоторых функций, не удов-
летворяющих требованию абсолютной интегрируемости. Рас-
смотрим Фурье-преобразования некоторых наиболее распростра-
ненных функий, используемых в теории управления:
1). ),cos()(
11
tAtf
ω
=
.)]()([)]cos([)(
11111
ω
ω
δ
ω
ω
δ
π
ω
ω
+
+
−
=
= AtAFjf
В справедливости последнего соотношения можно убедиться,
выполнив обратное преобразование Фурье в силу (2.52) и фильт-
рующих свойств
δ
-функций П. Дирака. В результате можно по-
лучить равенство
.)cos(
2
)(
2
1
)(
2
1
))]()(([
11
11
111
11111
1
∫
=
+
=++
∫
+−=++−
∞
∞−
−
∞
∞−
tA
ee
AdeA
deAAF
tjtj
tj
tj-
ωωωωδπ
π
ωωωδπ
π
ωωδωωδπ
ωω
ω
ω

78
2). .)]()([)]sin([Α
11
1
11
ωωδωωδ
π
τω
+−−
Α
=
j
F
3).
.)(
1
)](1[
ωδπ
ω
+=
j
tF
Соотношения 2) и 3) доказываются аналогично доказательству
соотношения 1).
2.7.3. Частотные характеристики непрерывных объектов
и систем.
Перейдем к анализу реакций непрерывных объектов
или систем управления на гармонические воздействия. Следует
отметить, что частотные характеристики имеют реальный смысл
только для устойчивых объектов и систем.
Рассмотрим реакцию объекта на гармоническое входное
воздействие, которое воздействует на вход бесконечно долго. То-
гда
связи Фурье-изображений входа и выхода для полиномиаль-
ных моделей «вход-выход» определяются соотношениями:
)(]...)()([
)(]...)()([
1
10
1
10
ωωω
ωωω
juBjBjB
jyAjAjA
g
gg
g
gg
+++=
=+++
−
−
,
где )(
ω
j
u , )(
ω
j
y
– изображения входов и выходных координат.
Тогда
Фурье-изображение выходных координат имеет вид:
)()()(
ω
ω
ω
j
u
j
W
j
y
=
, (2.53)
где )()]([)(
1
ωωω
jBjAjW
−
= – комплексная частотная харак-
теристика (матрица)
объекта или системы управления.
Определение 2.7.2. Матрицей частотных характери-
стик
называется матрица )(
ω
j
W в равенстве типа (2.53), связы-
вающем Фурье-преобразования векторов входного и выходного
сигналов объекта или системы управления.