Козлов В.Н., Куприянов В.Е., Шашихин В.Н. Управление энергетическими системами. Часть1. Теория автоматического управления
Подождите немного. Документ загружается.


1. ПРИНЦИПЫ ПОСТРОЕНИЯ И КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
9
1. ПРИНЦИПЫ ПОСТРОЕНИЯ И КЛАССИФИКАЦИЯ
СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Предмет теории автоматического управления состав-
ляют методы математического моделирования, анализа и
синтеза систем автоматического управления (САУ). САУ -
совокупность объекта управления (ОУ) и управляющего уст-
ройства (УУ), взаимодействующие на основе принципов
управления. Определена структура управления как целене-
правленного воздействия на объект.
1.1. Объекты управления
Объект управл
ения – это неизменяемая часть САУ. Рас-
смотрим примеры объектов, их структурные схемы (совокуп-
ность связанных элементов - звеньев) и цели управления.
Пример 1.1.1. Дифференциальные уравнения ОУ - электро-
энергетической системы (ЭЭС) конечной мощности, работающей
параллельно с ЭЭС бесконечной мощности, имеют вид:
2
,,
y гэгг
TT p Tppku
α
ωωρϕ μϕω ω
+=−++ = +=−+
,
где (), (), (), ()ttptt
ω
ϕμ
– отклонения частоты, угла ротора, мощ-
ности и нагрузки эквивалентного генератора от некоторого ста-
ционарного состояния;
эy
TkTT ,,,,
2
ρ
α
– параметры ОУ, u –
управление (управляющее воздействие) для изменения активной
мощности генератора. Структурная схема ОУ приведена на
рис. 1.1, где
/
p
ddt
Δ
= - оператор дифференцирования по времени,
а далее
p
s= - параметр преобразования Лапласа. Цели управле-
ния заданы целевыми неравенствами для частоты:
2
|() |
зад
t
ω
ω
ωσ
−≤, где
з
ад
ω
,
2
ω
σ
- заданное значение частоты и допус-
тимая ошибка - отклонение от заданного значения по частоте.

10
Рис. 1.1. Структурная схема энергосистемы
Пример 1.1.2. Уравнения динамики ОУ - летательного ап-
парата (рис. 1.2) можно представить в форме:
1234
12
(),
( ), , / 57.3 ,
e
в
MM M MuMt
YYuYt n
ϑϑαα
θ
αϑθανθρ
=++++
=++ =+ =
где
(), (), (), (), (), ()tttntutt
ϑ
αθ ν
– отклонение углов тангажа,
атаки, наклона траектории, нормальная перегрузка, угол откло-
нения рулей высоты, скорость полета как функции времени, а
остальные величины – параметры объекта управления.
Рис. 1.2. К математической модели летательного аппарата
y
g
y
x
v
g
x
0
α
θ
υ
ya
TpT +
2
1
p
ρ
1+pT
k
э
1−
k
μ
ω
г
p
u
ϕ

1. ПРИНЦИПЫ ПОСТРОЕНИЯ И КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
11
Целью управления является достижение целевого условия
типа неравенства:
_
2
|() |tc
ϑ
ϑϑ
−≤, что соответствует стабилизации
угла тангажа аппарата с помощью управляющих воздействий.
Пример 1.1.3. Уравнения, описывающие изменение
скорости двигателя постоянного тока имеют вид:
,,
2
2
1
ωϕωωω
==++
kuTT
а соответствующая структурная схема, иллюстрирующая взаимо-
связь звеньев, приведена на рис. 1.3. В уравнениях и на рис. 1.3
Рис. 1.3. Структурная схема двигателя постоянного тока
использованы следующие обозначения переменных:
(), (), ()ttut
ωϕ
– отклонения скорости, угла и управления в ви-
де изменения напряжения. Цель управления состоит в обеспече-
нии целевого условия:
|
()
|
mint
ω
ω
−
→
, задающего цель управ-
ления в виде минимизации отклонения скорости от заданного
значения
ω
с помощью синтезированных законов управления.
Рассмотренные объекты управления описываются обыкно-
венными дифференциальными уравнениями, которые могут быть
исходными для получения других видов математического описа-
ния, в частности, описаний в форме «вход-выход», «вход-
состояния-выход» (в непрерывном и дискретном времени), час-
тотной области, а также в других формах «временного» и «час-
тотного» описаний.
1
2
22
1
++ pTpT
k
p
1
u ω φ=y

12
1.2. Классификация и принципы создания систем
автоматического управ
ления
Управление – это целенаправленное воздействие на объ-
ект управления для достижения заданных целей. Управление
формируется управляющим устройством (УУ) в соответствии с
целями управления, типы которых определяются классами САУ.
1.2.1. Основные классы систем управления. Различают
основные классы САУ в зависимости от целей управления:
1. Системы стабилизации характеризуются наличием
внешних воздействий v(t), а це
ль управления заключается в под-
держании заданных значений координат – y(t) с помощью обрат-
ной связи, когда сигнал ошибки используется для формирования
управляющих воздействий на объект управления.
2. Системы программного управления содержат заданные
программы как функции времени – w(t), а цель управления – ор-
ганизация изменения выходных координат САУ по заданной про-
грамме.
3. Сле
дящие системы реализуют достижение цели управ-
ления – организация изменения координат y(t) по программе w(t)
с помощью обратной связи по отклонению от заданной програм-
мы изменения координат системы.
В зависимости от количества управляемых координат объ-
екта и управлений используются одномерные и многомерные
САУ. Современные САУ создаются с применением ЭВМ на эта-
пах пр
оектирования и формирования управляющих воздействий
на ОУ, что требует дискретизации процессов управления.
Структурная схема дискретной САУ с ЭВМ (рис. 1.4) реализует
управляющее устройство (УУ) основного контура (ОК) с помо-
щью ЭВМ, связанной с объектом аналого-цифровым (АЦП) и
цифро-аналоговым (ЦАП) преобразователями.

1. ПРИНЦИПЫ ПОСТРОЕНИЯ И КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
13
Рис. 1.4. Структурная схема дискретной САУ с объектом управления (ОУ)
и управляющим устройством (УУ)
Применение ЭВМ качественно изменяет законы управления
САУ в связи с алгоритмической формой задания законов про-
граммного управления, стабилизации и слежения, которая опре-
делила специфику качественного исследования. Это обстоятель-
ство требует математического аппарата для конструктивного
описания системы управления с ЭВМ. Использование ЭВМ по-
зволяет реализовать все основные принципы управления и обес-
печить достижение целей си
стем автоматического управления.
1.2.2. Основные классы, принципы и цели управления.
Различают следующие основные классы и принципы САУ,
структуры которых рассматриваются далее.
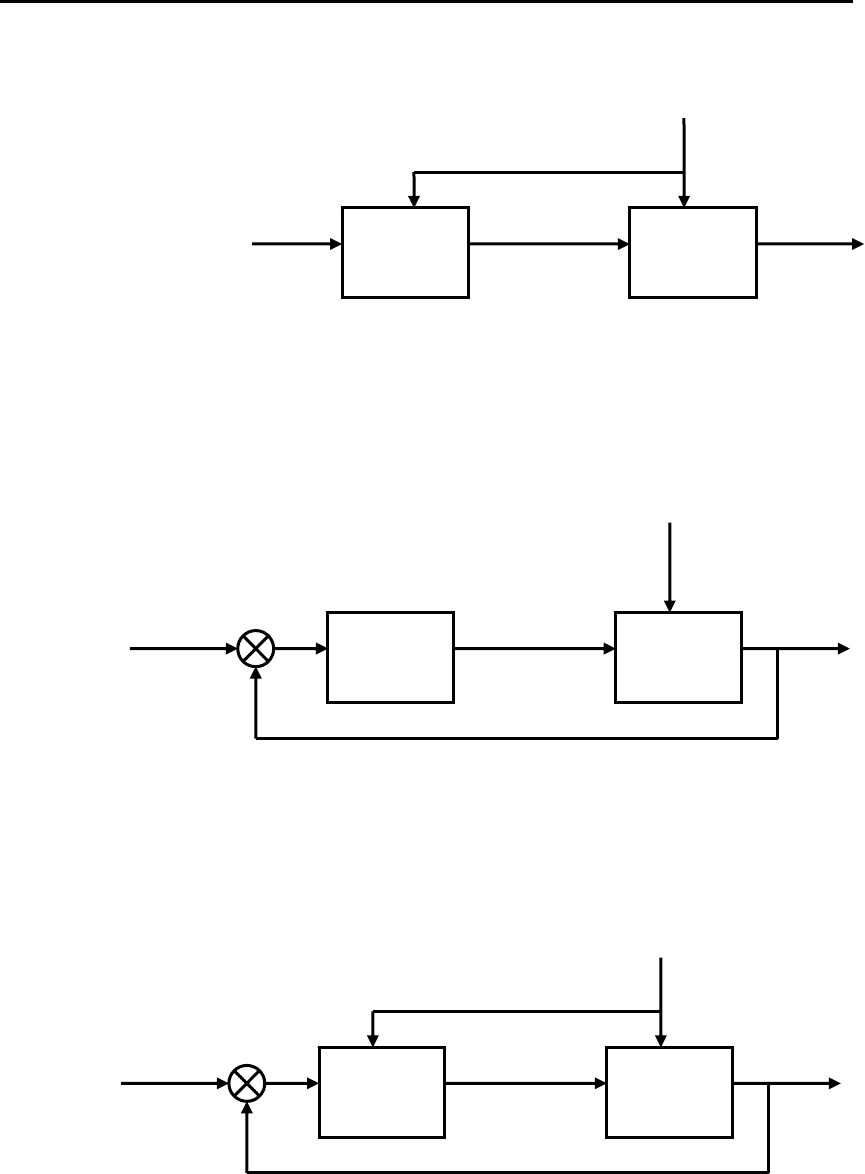
Разомкнутые САУ определяются соответствующей струк-
турной схемой (рис. 1.5.а), иллюстрирующей формирование
управлений только на основании информации о цели управления
и возмущении, а истинное значение управляемой координаты y(t)
ОУ
УУ ОК
АЦП
ЦАП
v(t)
y
(t)
y
t
u
t
u(t)

14
не контролируется. Этот классс САУ реализует принцип управ-
ления по возмущению.
Замкнутые САУ (рис. 1.5.б) формируются на основе прин-
ципа обратной связи. В замкнутых системах управления изме-
ряются отклонения управляемой координаты y(t) от заданного
значения w(t). Цель управления состоит в формировании управ-
лений, устраняющих ошибки:
)()()(
t
y
t
w
t
e
−
=
и реализуется
принцип управления по отклонению.
Комбинированные САУ (рис. 1.5.в) реализуют принципы
управления по возмущению и по отклонению.
Расширение функциональных возможностей САУ с управ-
ляющими устройствами с ЭВМ позволяет существенно увели-
чить возможности управления за счет перехода к модальному,
локально-оптимальному, оптимальному, адаптивному и робаст-
ному управлению как варианта адаптивного управления.
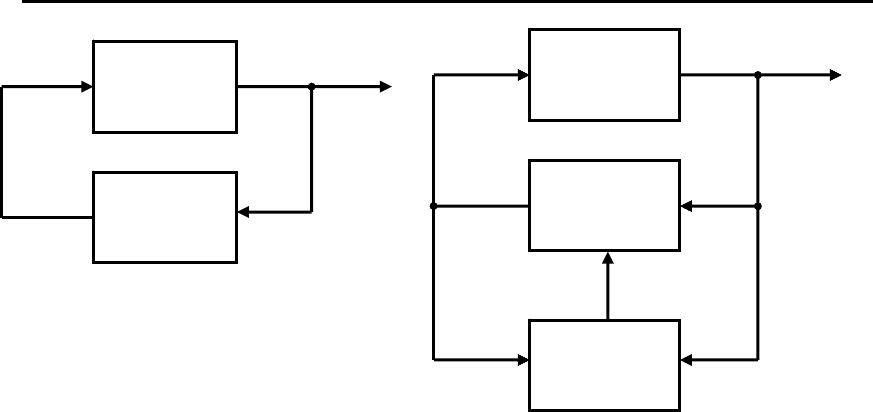
Структурные схемы САУ приведены на ри
с. 1.6 и 1.7. Схема
системы управления с управляющими устройствами сложного
типа (см. рис. 1.6) образуется объектом управления (ОУ) и УУ –
регулятором основного контура (РОК), для которого заданы це-
ли РОК.
Управление осуществляется при наличии или отсутствии
полной информации о координатах и параметрах объекта управ-
ления. При неполной инфор
мации о параметрах объекта управ-
ления в структуру САУ может включаться регулятор контура
адаптации (РКА), подстраивающего неизвестные параметры на
основе целевых условий РКА (см. рис. 1.7). При этом регулятор
основного контура формирует управления
)(
t
u в функции откло-
нений координат
)(
t
y
от заданных значений, а РКА, как правило,
формирует управления подстройкой параметров
t
τ
, в непрерыв-
ном R
t
∈ или дискретном времени .
N
t
∈
1. ПРИНЦИПЫ ПОСТРОЕНИЯ И КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
15
Рис. 1.5. Структурные схемы разомкнутых, замкнутых и
комбинированных САУ
УУ ОУ
v(t)
w(t) u(t) y(t)
–
в)
УУ
ОУ
v(t)
w(t) u(t) y(t)
-
б
)
УУ ОУ
v(t)
w(t) u(t) y(t)
а
)
16
Рис.1.6. САУ с регулятором Рис.1.7. САУ с регуляторами
основного контура (РОК) основного контура (РОК) и
контура адаптации (РКА)
Системы управления с регулятором контура адаптации на-
зываются адаптивными САУ. Адаптивные САУ синтезируются
с применением методов идентификации, метода стохастической
аппроксимации, методом рекурретных целевых неравенств, ме-
тодом скоростного градиента, методом функций Ляпунова. Пере-
численные методы разработки РКА определяют соответствую-
щие целевые условия этого регулятора.
Общие принципы построения САУ реализуются на основе
математических мод
елей объектов, целей управления, мате-
матических формулировок задач управления с применением
моделей, принципов и целей. Это позволяет синтезировать и
реализовать алгоритмы управляющих устройств (регуляторов)
основного контура управления и контура адаптации.
РОК
ОУ
)(tu )(ty
РКА
t
τ
РОК
ОУ
)(tu
)(ty

2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
1
7
2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ И
СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Системная характеристика линейных моделей объектов
и систем управления дана в виде совокупности взаимных пре-
образований моделей. Преобразование моделей выполняется
непрерывными и дискретными (прямыми и обратными) пре-
образованиями Лапласа и Фурье, на основе формулы Коши и
резольвенты линейного оператора систем. Приведены кусоч-
но-линейные моде
ли объектов управения и их свойства.
2.1. Классификация математических моделей
объектов и сист
ем
При решении задач автоматического управления использу-
ются различные математические модели объектов, систем авто-
матического управления (САУ) и их отдельных звеньев. Сущест-
венной характеристикой системы автоматического управления
являются типы сигналов, используемых при измерении и форми-
рования управляющего воздействия.
Если сигналы о состоянии объектов и управляющие воздей-
ствия являются непрерывными функциями времени, такие си
сте-
мы называются непрерывными САУ. Если аналогичные сигналы
в САУ формируются в дискретном времени, то координаты сис-
темы и управляющая функция (управление) являются дискрет-
ными функциями времени, а такие системы называются дис-
кретными САУ.
Непрерывные САУ описываются обыкновенными диффе-
ренциальными уравнениями или дифференциальными уравне-
ниями в частных производных. Дискретные САУ описываются
у
равнениями в конечных разностях. Дифференциальные и конеч-
но-разностные уравнения объектов и систем могут быть линей-
ными и нелинейными уравнениями. В соответствии с этим го-
ворят о линейных или нелинейных объектах и системах автома-

18
тического управления. Большое значение имеют специальные
классы нелинейных автоматических систем – кусочно-линейные
САУ, описываемые кусочно-линейными дифференциальными и
разностными уравнениями.
В дальнейшем большое внимание будет уделено линейным
объектам и системам. Будут рассмотрены уравнения объектов и
систем типа «вход–выход», «вход–состояния–выход», модели в
виде свертки, частотных характеристик (матриц частотных ха-
рактеристик) и передаточных функций (матриц передаточны
х
функций), взаимосвязи между которыми показаны на рис. 2.1. Из
данных рис. 2.1 можно сделать вывод о том, что ряд конкретных
математических моделей объектов и систем можно получить пу-
тем применения к их дифференциальным или разностным урав-
нениям интегральных или дискретных преобразований Лапласа
или Фурье.
Использование преобразования Лапласа дает возможность
ввести в рассмотрение уравнение свертки и изучать пе
редаточ-
ные функции САУ. С помощью преобразований Фурье могут
быть построены и изучены частотные характеристики непрерыв-
ных и дискретных САУ. Далее будут изучены связи между раз-
личными математическими моделями объектов и систем автома-
тического управления (см. рис. 2.1).
Для этого необходимо использовать ме
тоды теории функ-
ций комплексного переменного (ТФКП), формулу Коши для ре-
шения систем линейных уравнений, представленных в форме
«вход–состояние–выход» (уравнения состояния). Возможно так-
же применение общих методов для уравнений «вход–выход» для
полиномиальных моделей с правыми и левыми частями операто-
ров дифференцирования (полиномами от оператора дифференци-
рования) или раз
ностными операторами (полиномами от опера-
тора сдвига или оператора конечных разностей).