Динкель А.Д. Теория автоматического управления
Подождите немного. Документ загружается.

213
9.5. РЕЖИМ АВТОКОЛЕБАНИЙ
И УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ СИСТЕМ
Применительно к нелинейным системам автоматического регулиро-
вания существует два понятия — устойчивость автоколебаний и устойчи-
вость равновесного состояния.
Под устойчивостью режима автоколебаний понимается такой режим
автоколебаний, который физически осуществим в системе и устойчиво
удерживается при возможных отклонениях его как по амплитуде, так и по
частоте, возникающих по какой либо причине.
Если известны
передаточная функция линейной части
(
)
()
pR
pI
W
л
л
л
=
, (9.29)
где I
л
(р), R
л
(р) — полиномы числителя и знаменателя эквивалентная пере-
даточная функция нелинейной части (9.25), то эквивалентная передаточная
функция разомкнутого и замкнутого контуров нелинейной системы соот-
ветственно будут следующими:
⎥
⎦
⎤
⎢
⎣
⎡
+= )(
ω
)(
)(
)(
ω),,(
м1м
л
л
м
хq
p
хq
pR
pI
хpW
р
, (9.30)
⎥
⎦
⎤
⎢
⎣
⎡
++
⎥
⎦
⎤
⎢
⎣
⎡
+
=
)(
ω
)()()(
)(
ω
)()(
ω),,(
м1млл
м1мл
з
хq
p
хqpIpR
хq
p
хqpI
хpW
м
. (9.31)
В режиме автоколебаний амплитуда х
м
и частота
ω
будут постоянны-
ми. Следовательно, и передаточная функция системы как в разомкнутом,
так и в замкнутом состоянии также постоянная, а выражения (9.29) и (9.30)
линейны и их можно анализировать методами теории линейных систем ав-
томатического регулирования.
Условием существования в нелинейной системе установившихся ав-
токолебаний вида
214
tхtх
а
ωsin )(
м.авых
=
(9.32)
с постоянной амплитудой х
м.а
и частотой автоколебаний ω
а
является нахо-
ждение нелинейной линеаризованной системы на колебательной границе
устойчивости. Эта граница может быть определена на основе любого из
критериев устойчивости линейных систем автоматического регулирова-
ния. Наиболее удобными для определения колебательной границы устой-
чивости являются частотные методы Михайлова и Найквиста.
Комплексные частотные характеристики разомкнутой и замкнутой
системы при условии существования
автоколебаний, исходя из (9.30) и
(9.31) запишутся в следующем виде:
[]
)()(
)ω(
)ω(
)ω,(
м.a1м.a
aл
aл
ам.а
хjqхq
jR
jI
jхW
р
+= ; (9.33)
[
]
[]
)()()(ω)ω(
)()()ω(
)ω,(
м.a1м.aaлaл
м.a1м.aaл
aм.аз
хjqхqIjR
хjqхqjI
jхW
++
+
= . (9.34)
Приравняв знаменатель (9.34) к нулю, получим уравнение характери-
стической кривой Михайлова:
[
]
0)()()(ω)ω(
м.a1м.aaлaл
=
+
+ хjqхqIjR , (9.35)
которая проходит через начало координат при конкретных значениях х
м.а
и
ω
а
, что и будет соответствовать условию существования автоколебаний в
системе.
Выделив в левой части (9.35) вещественную и мнимую составляющие,
получим систему двух уравнений:
⎭
⎬
⎫
=
=
0.)ω,(
0;)ω,(
ам.а
ам.а
хQ
хP
(9.36)
Выполнение этих равенств соответствует прохождению характери-
стической кривой через начало координат, а следовательно, получаемые
значения х
м.а
и ω
а
в результате решения (9.36) и будут параметрами авто-
колебательного режима в нелинейной системе.
Если уравнения (9.36) не имеют положительных действительных кор-
ней х
м.а
и ω
а
, то автоколебания в системе невозможны.

215
Полученные в результате решения (9.36) значения х
м.а
и ω
а
необходимо
проверить, соответствуют ли они устойчивым автоколебаниям в системе.
Для этого используется следующее условие устойчивости автоколебаний:
0
ωω
м.aаaм.а
>
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
х
QPQ
х
P
. (9.37)
При этом в (9.37) необходимо подставить числовые значения х
м.а
и ω
а
,
полученные в результате решения (9.36).
Данный метод определения параметров устойчивых автоколебаний в
нелинейной системе автоматического регулирования приемлем при отно-
сительно невысоком порядке дифференциального уравнения, описываю-
щего динамические процессы в линейной части системы, ввиду сложности
или невозможности решения системы уравнений (9.36). Если линейная
часть описывается дифференциальным уравнением высокого порядка или
включает в себя
элемент запаздывания, то для выявления параметров авто-
колебаний и их устойчивости можно воспользоваться критерием устойчи-
вости Найквиста.
Согласно этому критерию система автоматического регулирования на-
ходится на границе устойчивости, если амплитудно-фазовая характеристика
разомкнутой системы проходит через точку с координатами (–1, j0). Следо-
вательно, условием существования автоколебаний является равенство
1)()
a
ω(
м.анл
−
=
хWjW , (9.38)
где
()
(
)
()
ал
ал
ал
ω
ω
ω
jR
jI
jW = ; )()()(
м.а1м.ам.ан
хjqхqхW
+
=
,
или
()
()
м.ан
ал
1
ω
хW
jW −=
. (9.39)
Левая часть уравнения (9.39) представляет собой амплитудно-фазовую
характеристику линейной части системы, а правая — обратную характери-
стику нелинейного элемента, взятую с противоположным знаком.
Уравнение (9.39) удобно решать графически. Для этого указанные ха-
рактеристики необходимо построить в одной системе координат (рис. 9.10),
отмечая при этом на кривой ω)(
л
jW частоту колебаний ω
а
, а на кривой
216
)(
1
м.а
н
хW
амплитуду колебаний х
м.а
. В точках пересечения этих характе-
ристик выполняется условие (9.39). Если характеристики не пересекаются,
то автоколебания отсутствуют.
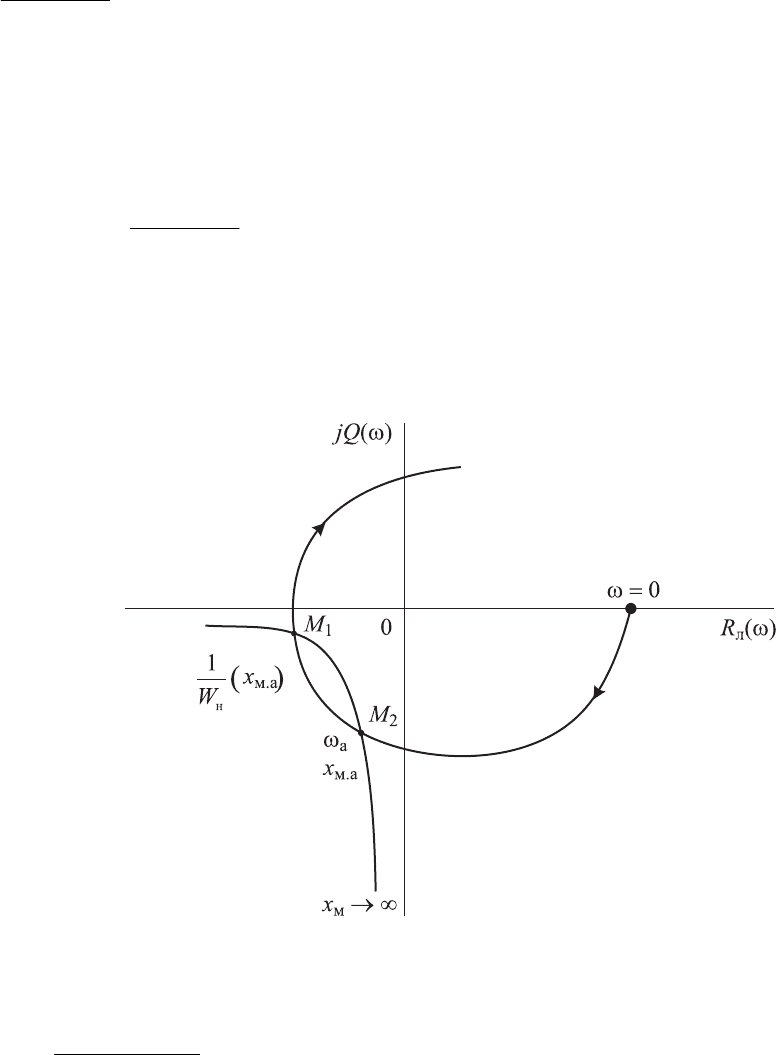
Точка пересечения характеристик, соответствующая режиму устойчи-
вых автоколебаний, устанавливается по следующему правилу: если точка
на кривой
)(
1
м.ан
хW
, близкая к точке пересечения, но сдвинутая в направ-
лении возрастания параметра х
м.а
, не охватывается кривой ω)(
л
jW , то ав-
токолебания устойчивы с параметрами х
м.а
и ω
а
(точка М
2
), если же охва-
тывается, то неустойчивы (точка М
1
).
Рис. 9.10. Определение амплитуды и частоты автоколебаний
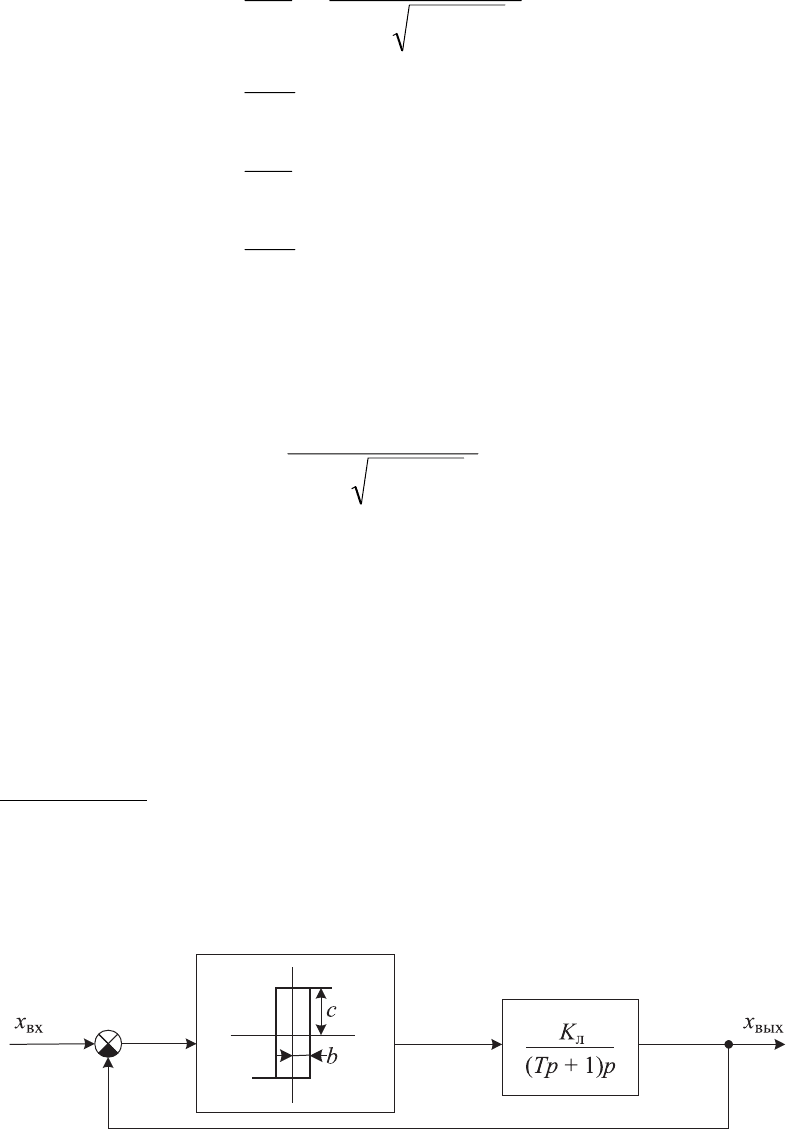
Пример 9.2. Определим амплитуду и частоту автоколебаний в нели-
нейной системе автоматического регулирования (рис. 9.11) на основе кри-
терия Михайлова при следующих параметрах:
K
л
= 1, Т
1
= 2 с, Т
2
= 0,5 с, с = 1, b = 0,5.
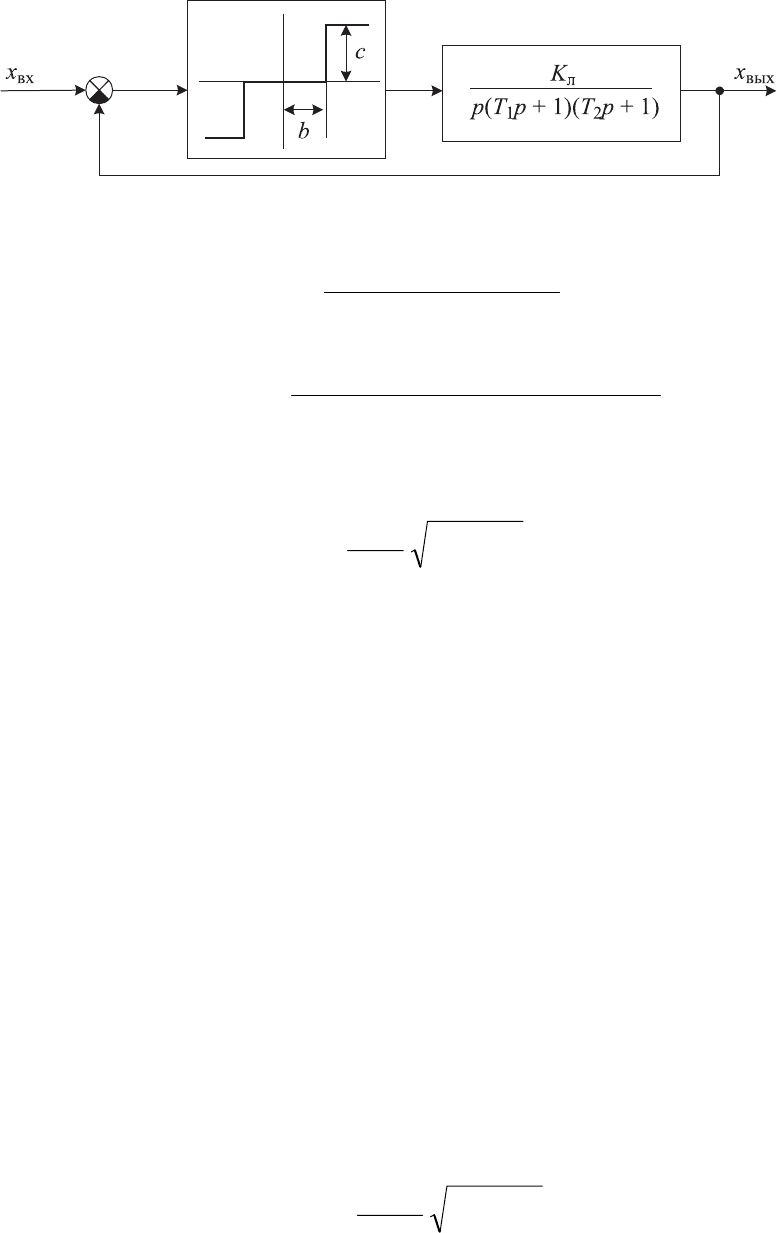
Согласно структурной схеме, приведенной на рис. 9.11, передаточная
функция разомкнутой и замкнутой систем на основе (9.30) и (9.31) соот-
ветственно равны:
217
Рис. 9.11. Структурная схема нелинейной системы
)(
1)1)((
ω),,(
м
21
л
м
хq
рТрТр
хрW
р
++
=
K
, (9.40)
)(1)1)(
)(
ω),,(
мл21
мл
мз
хqKрТрТр
хqK
хрW
+++
=
(
. (9.41)
В соответствии с табл. 9.1 для принятого типа нелинейного элемента
22
м
2
м
м
π
4
)( bх
х
с
хq −= ; (9.42)
Исходя из (9.41), характеристическое уравнение замкнутой системы
имеет вид
0)()(
мл
2
21
3
21
=++++ хqKррТТрТТ
. (9.43)
Подставив в (9.43) р = jω, получим
0)(ω)ω(ω
м
2
21
3
21
=+++−− хqjТТТjТ
. (9.44)
Тогда вещественную и мнимую части (9.44) можно записать так:
⎪
⎭
⎪
⎬
⎫
−−=
++−=
1).ωω()ω,(
),()ω()ω,(
2
21ам
мл
2
21ам
ТТхQ
хqKТТхP
(9.45)
Приравнивая выражения (9.45) к нулю и подставляя в них (9.42), по-
лучим следующую систему уравнений:
⎪
⎭
⎪
⎬
⎫
=−
=−++−
0.1ω
0,
π
4
)ω
2
21
22
м
2
м
л
2
а21
ТТ
bх
х
сK
ТТ(
(9.46)
218
Из второго уравнения системы (9.46) частота автоколебаний
1
21
а
с 1
0,52
11
ω
−
=
⋅
==
ТТ
. (9.47)
Подставляя в первое уравнение (9.46) частоту ω
а
(9.47), его можно
привести к виду
0
22
=+− ВуАу , (9.48)
где
2
м
ху =
,
2
21
21
лк
2
2
4
π
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
=
ТТ
ТТ
Kc
A
.
Корни этого уравнения
A
Аb
2
411
2
1,2
−±
=у
. (9.49)
Подставляя в (9.49) исходные данные, с учетом принятых обозначе-
ний получим
1,23
0,871
1,2
±
=у
.
Следовательно,
1,27
м1
=
х и 0,316
м2
=
х .
Так как (9.42) справедливо при bх >
м
, то окончательно принимаем
значение амплитуды колебаний
1,27
м1м.а
=
=
хх .
Для того чтобы установить устойчивость колебаний при полученных
значениях частоты
1
а
с 1
−
=ω
и амплитуды
27,1
=
м1
х
, применим общее ус-
ловие устойчивости автоколебаний (9.37). В данном случае имеем
219
⎪
⎪
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎪
⎪
⎬
⎫
−=
∂
∂
=
∂
∂
+−=
∂
∂
−
−
=
∂
∂
.ω31
ω
0;
;)ω2(
ω
;
π
)(24
2
а21
a
м
a21
a
22
м
3
м
2
м
2
л
м
ТТ
Q
х
Q
TT
P
bхх
хbсK
x
P
(9.50)
Подставляя значения частных производных (9.50) в условие (9.37) и
учитывая одновременно выражение (9.47), получим
0
π
)(28
22
м
3
м
2
м
2
л
>
−
−
−
bхх
хbсK
(9.51)
или
0,71
м
>х .
Это условие в данном случае выполняется, а следовательно автоколе-
бания с частотой
1
a
c 1ω
−
= и амплитудой 1,27
а м.
=
х будут устойчивыми.
Пример 9.3.
Определим амплитуду и частоту автоколебаний в нели-
нейной системе автоматического регулирования (рис. 9.12) на основе кри-
терия Найквиста при следующих параметрах:
K
л
= 2, Т = 0,5 с, с = 1, b = 0,5.
Рис. 9.12. Пример структурная схемы нелинейной системы
Исходя из передаточной функции линейной части разомкнутой систе-
мы, ее амплитудно-фазовая частотная характеристика
220
1
2
ω
2
)ω(
ω
л
2
л
ωω
ω)(
+
+
−=
+−
=
Т
jТ
K
p
jТ
K
jW
. (9.52)
Соответственно вещественная и мнимая составляющие этой характе-
ристики запишутся в следующем виде:
⎪
⎪
⎭
⎪
⎪
⎬
⎫
+
=
+
=
.
1ω
ω
) (ω
;
1ω
) (ω
22
л
л
22
л
л
Т
K
I
Т
ТK
R
(9.53)
Согласно табл. 9.1 отрицательная обратная характеристика нелиней-
ного элемента
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+−−=
−−
−=−
jbbх
сK
х
cb
jbх
х
с
хW
22
м
л
2
м
22
м
2
м
мн
4
π
π
4
π
4
1
)(
1
.(9.54)
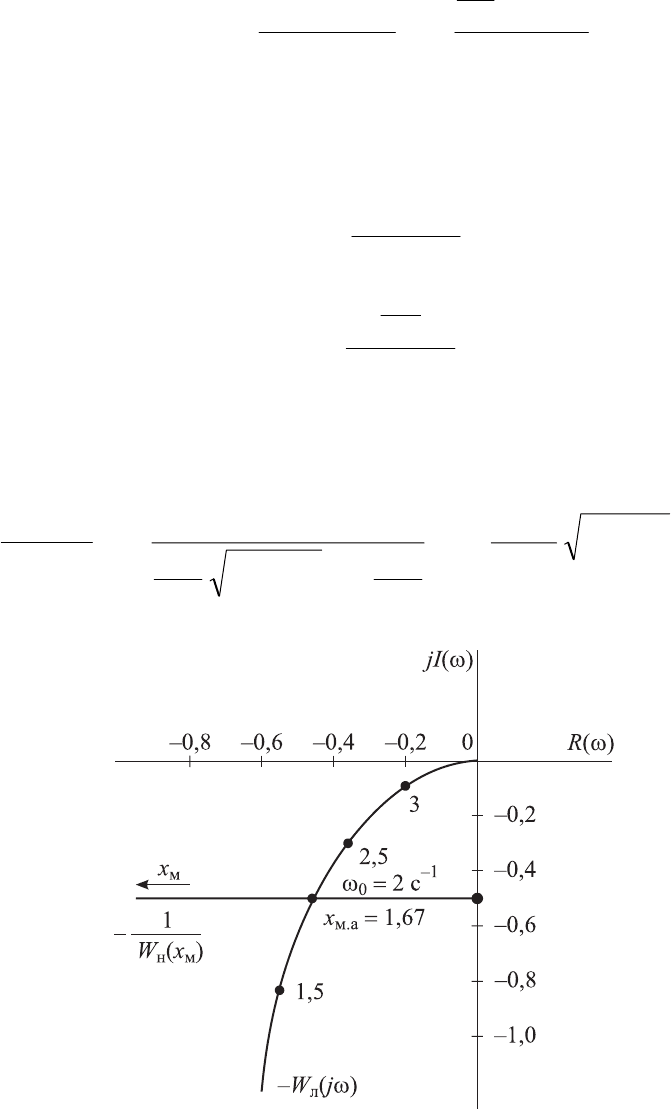
Рис. 9.13. Определение амплитуды и частоты автоколебаний
на основе критерия Найквиста

221
Соответственно вещественная и мнимая составляющие этой характе-
ристики запишутся в следующем виде:
⎪
⎭
⎪
⎬
⎫
−=
−−=
.)(
;
4
π
)(
мн
22
м
л
мн
bхI
bх
сK
хR
(9.55)
Графическое решение поставленной задачи на основе (9.53) и (9.55)
при исходных данных приведено на рис. 9.13. Здесь показаны графики ам-
плитудно-фазовой характеристики линейной части ω)(
л
jW и обратная от-
рицательная характеристика нелинейного элемента
)(
1
мн
хW
− . Точка пере-
сечения этих характеристик определяет частоту ω
а
и амплитуду х
м.а
авто-
колебаний в нелинейной системе. В данном случае автоколебания устой-
чивые, так как точка на характеристике
)(
1
мн
хW
−
, близкая к точке пересе-
чения, сдвинутая в направлении увеличения
х
м
, не охватывается характе-
ристикой ω)(
л
jW .