Динкель А.Д. Теория автоматического управления
Подождите немного. Документ загружается.

173
ГЛАВА 8.
ИМПУЛЬСНЫЕ СИСТЕМЫ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Импульсные системы относятся к группе дискретных систем.
В импульсной системе один или несколько сигналов являются дис-
кретными и представляют собой последовательность кратковременных
импульсов. Преобразование непрерывных сигналов в дискретные осуще-
ствляется специальным дискретным устройством, которое называется им-
пульсным элементом.
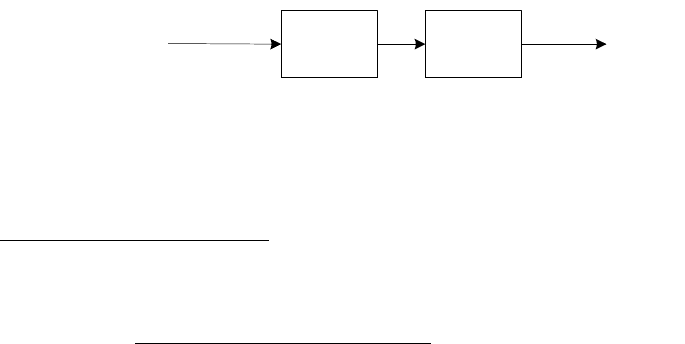
В простейшем случае импульсную систему автоматического регули-
рования можно представить в виде последовательно
соединенных им-
пульсного элемента (ИЭ) и непрерывной линейной части (ЛЧ) (рис. 8.1).
ИЭ ЛЧ
Рис. 8.1. Схема импульсной системы регулирования
Вообще преобразование непрерывного сигнала в дискретный называ-
ется квантованием сигнала
. Существует ряд видов квантования непрерыв-
ных сигналов. Квантование, осуществляемое импульсным элементом в ви-
де преобразования непрерывного сигнала в последовательность импуль-
сов, называется импульсной модуляцией
.
8.1. КЛАССИФИКАЦИЯ
ИМПУЛЬСНЫХ СИСТЕМ РЕГУЛИРОВАНИЯ
В зависимости от того, какой параметр импульсов на выходе им-
пульсного элемента изменяется в функции входного непрерывного сигнала
и в зависимости от вида импульсной модуляции различают три вида им-
пульсных систем регулирования: с амплитудно-импульсной модуляцией
(АИМ); с широтно-импульсной модуляцией (ШИМ); с времяимпульсной
Х
вх
(р)
Х
вых
(р)
174
модуляцией (ВИМ). Во всех случаях форма импульсов принимается неиз-
менной прямоугольной.
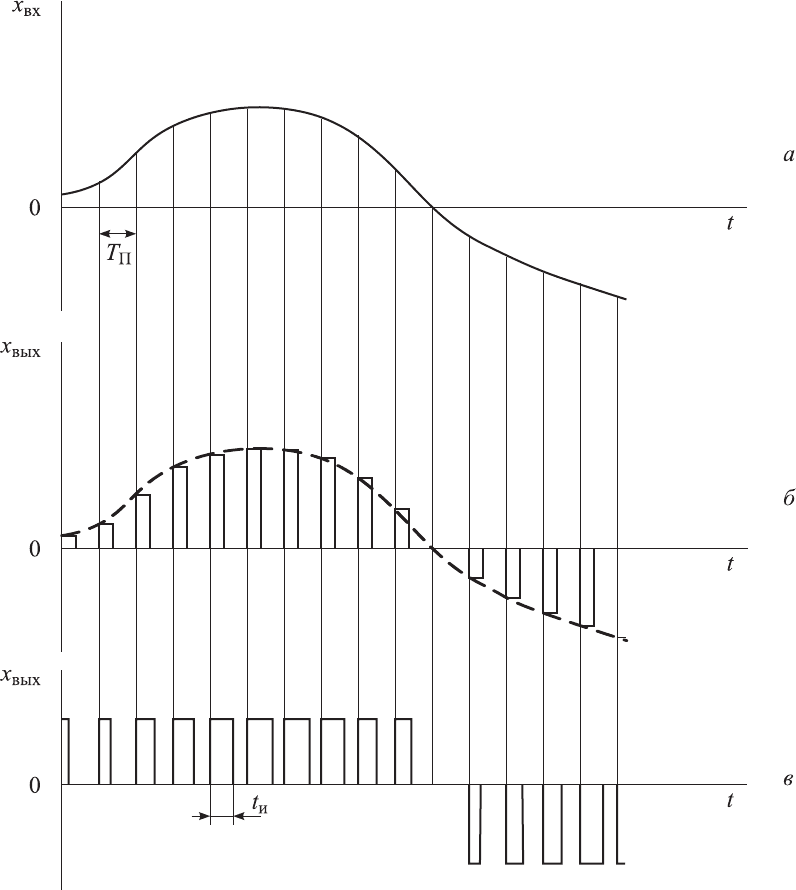
В системах регулирования с амплитудно-импульсной модуляцией моду-
лируемым параметром является высота (амплитуда) импульсов, которая за-
висит от значения входного непрерывного сигнала в начале периода кванто-
вания Т
п
. При этом период квантования (период следования импульсов) оста-
ется постоянным (рис. 8.2, а). Среднее значение сигнала на выходе импульс-
ного элемента будет зависеть как от входного сигнала, так и от длительности
импульсов относительно периода квантования, т. е. от периода их следова-
ния. Отношение длительности импульса t
и
к длительности периода Т
п
.
Рис. 8.2. Графики изменения входного и выходного сигналов НЭ при моду-
ляции:
а, б — амплитудно-импульсной; в — широтно-импульсной

175
п
и
γ
Т
t
= , (8.1)
называется скважностью импульсов.
Таким образом, в системах с амплитудно-импульсной модуляцией из-
менять среднее значение сигнала на выходе импульсного элемента можно
изменением входного сигнала или скважности импульсов (рис. 8.2, б).
В системах импульсного регулирования с широтно-импульсной моду-
ляцией высота (амплитуда) импульсов остается постоянной и выбирается
исходя из максимально
возможного значения входного сигнала, а модели-
руемым параметром является длительность импульсов, т. е. скважность (см.
рис. 8.2). Следовательно, среднее значение сигнала на выходе нелинейного
элемента будет зависеть только от скважности импульсов (см. рис. 8.2, в).
При этом скважность импульсов зависит от значения входного сигнала
в момент времени, соответствующий началу периода коммутации.
Системы импульсного
регулирования с времяимпульсной модуляцией
подразделяются на системы с частотно-импульсной и фазоимпульсной мо-
дуляцией. В обеих системах амплитуда и скважность импульсов остаются
неизменными. При частотно-импульсной модуляции моделируемым пара-
метром является период квантования (частота коммутации импульсного
элемента). При этом начало каждого очередного импульса совпадает с на-
чалом периода квантования. При
фазоимпульсной модуляции моделируе-
мым параметром является время запаздывания импульса по отношению к
моменту начала периода коммутации.
Импульсные элементы — составная часть структуры импульсных сис-
тем автоматического регулирования. В зависимости от вида модуляции
импульсные системы автоматического регулирования соответственно де-
лятся на амплитудно-импульсные, широтно-импульсные, частотно-
импульсные и фазоимпульсные. Наиболее широкое применение находят
амплитудно-импульсные и широтно-импульсные системы автоматическо-
го регулирования. Поэтому в дальнейшем будем ориентироваться на эти
системы.
176
8.2. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
И ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ИМПУЛЬСНОЙ
СИСТЕМЫ С АМПЛИТУДНО-ИМПУЛЬСНОЙ
МОДУЛЯЦИЕЙ
Импульсную систему автоматического регулирования можно рас-
сматривать как систему непрерывного действия, в которой происходит пе-
риодическое прерывание входного сигнала, осуществляемое импульсным
элементом с определенным периодом Т
п
(частотой ω
п
). Обычно частота
срабатывания импульсного элемента выбирается значительно выше поло-
сы частот пропускания непрерывной части системы.
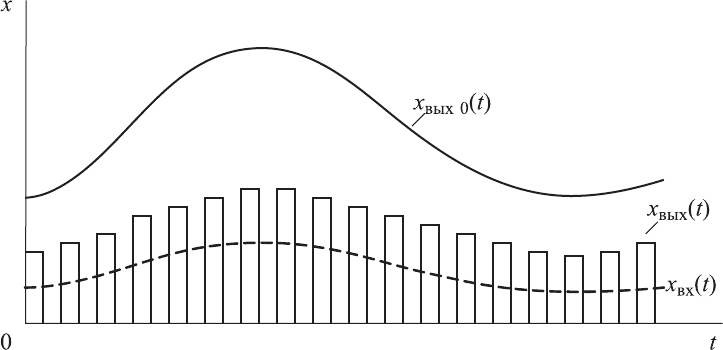
Непрерывная часть импульсной системы выполняет функцию фильтра
низких частот. В результате этого сигнал на выходе непрерывной части
х
вых0
(t) с определенным коэффициентом Т
п
повторяет низкочастотную со-
ставляющую сигнала на входе системы регулирования х
вх 0
, а высокочас-
тотная составляющая сигнала на входе непрерывной части, обусловленная
коммутацией нелинейного элемента, в значительной степени ослабляется
(отсеивается), как это показано на рис. 8.3. Как видно из приведенных гра-
фиков, для того чтобы снизить переменную составляющую сигнала на вы-
ходе линейной части, необходимо частоту модуляции входного сигнала
принимать как можно большей
.
Рис. 8.3. Переходный процесс в импульсной системе
Математическое описание импульсной системы состоит из описания
непрерывной части и импульсного элемента. Для описания импульсного
177
элемента необходимо знать форму выходных импульсов, статическую ха-
рактеристику и время запаздывания, если оно существенно.
При описании импульсного элемента форму импульсов примем пря-
моугольной. В линейном приближении, т. е. для ограниченного диапазона
входного сигнала, статическая характеристика импульсного элемента бу-
дет линейной. Она характеризуется коэффициентом передачи (коэффици-
ентом усиления)
х
a
K =
и
, (8.2.)
где а — высота (амплитуда) выходного импульса;
х — величина входного сигнала импульсного элемента в начале перио-
да повторения Т
и
.
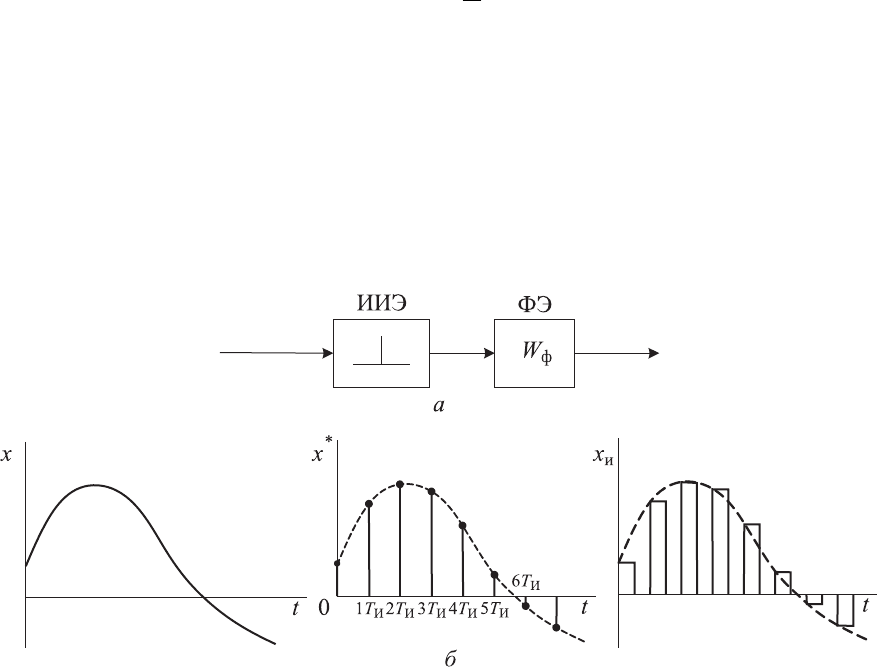
Для описания импульсного элемента представим реальный импульс-
ный элемент в виде двух элементов: идеального и формируемого, как по-
казано на рис. 8.4.
Рис. 8.4. Структурная схема (
а) и графики изменения сигналов
импульсного элемента (
б, в, г)
Идеальный импульсный элемент формирует идеальные импульсы,
представлящие собой мгновенные импульсы бесконечно малой длительно-
сти и бесконечно большой высоты, площадь которых, однако, конечна и
численно равна входному сигналу х в начале периода коммутации Т
п
, т. е.
это δ — импульсы, но не единичной, а переменной площади, которая явля-
ется мерой входного сигнала в дискретные моменты времени. На рис. 8.4
эти идеальные δ-импульсы х
*
(t) показаны в виде отрезков в моменты вре-
178
мени коммутации импульсного элемента nT
и
, длина которых численно
равна площади соответствующих δ-импульсов. В дальнейшем такой сиг-
нал на выходе идеального импульсного элемента будем называть импульс-
ной функцией.
Формирующий элемент преобразует идеальные импульсы (δ-импуль-
сы) в импульсы, соответствующие выходным импульсам реального им-
пульсного элемента х
и
(t) (см. рис. 8.4, г).
На основании преобразования Лапласа и рис. 8.4, передаточная функ-
ция формирующего звена
(р)х
(р)х
W
*
и
ф
= . (8.3)
Сигнал на входе формирующего элемента представляет собой после-
довательность единичных δ-импульсов. Следовательно, изображение этого
сигнала запишется в следующем виде:
1][δ
*
== (t)L(р)Х . (8.4)
На выходе формирующего элемента сигнал представляет собой пря-
моугольные импульсы длительностью γТ
п
. Такой импульс можно предста-
вит как сумму двух единичных функций, сдвинутых во времени на γТ
п
и
умноженных на передаточный коэффициент импульсного элемента:
)]1([1
пии
γTt(t)K(t)х
−
−
=
. (8.5)
Исходя из этого, на выходе формирующего элемента изображение
сигнала
р
K
рр
К(t)xL(р)Х
)е(1
11
]
и
[
п
п
γ
и
γ
ии
e
Тр
Tp
−
−
−
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−== . (8.6)
Тогда передаточная функция формирующего элемента запишется в
следующем виде:
р
K
W
)е(1
п
γ
и
ф
Тр−
−
= . (8.7)
В данном случае формирующий элемент представляет собой линейное
звено непрерывного действия.
179
Математическое описание и анализ импульсной системы регулирова-
ния с амплитудно-импульсной модуляцией существенно упрощается, если
все сигналы в системе, как в импульсной, так и в непрерывной частях, рас-
сматривать только в дискретные моменты времени
t = n T
п
, (8.8)
где n = 1, 2, 3…
В результате этого непрерывная функция х(t) заменяется дискретной
функцией, значения которой в начале каждого периода Т
п
совпадают со зна-
чением непрерывной функции, а в остальное время равны нулю (см. рис. 8.4)
][)()(
*
п
п
nTхtхtх
nTt
=
=
=
(8.9)
Такая дискретная функция называется решетчатой
. В этом случае не-
прерывная функция х(t) является огибающей решетчатой функцией х[nТ
п
].
При рассмотрении дискретной функции целесообразно перейти к от-
носительному времени
п
T
t
t =
*
,
т. е. измерять время числом периодов Т
п
. Решетчатая функция, аргу-
ментом которой является относительное время, называется нормированной
решетчатой функцией и обозначается х[n].
Аналогом производных непрерывной функции для решетчатой функ-
ции являются разности соответствующего порядка:
][1][][∆
n
x
n
х
n
х
−+= — разность первого порядка
(аналог первой производной),
][ ∆1][∆][∆
2
n xn хn х −+= — разность второго порядка
(аналог второй производной),
……………………………….……………………………
][∆1][∆][∆
11
n xn хn х
nmm
−
−
−+= — разность m-го порядка
(аналог
m-й производной).
Исходя из этого дифференциальное уравнение, описывающее непре-
рывную функцию
][
][
1
1
10
1
1
10
ll
ll
bp b...pbpbх(t)
ap a...papaу(t)
mm
mm
++++=
=++++
−
−
−
−
, (8.10)

180
где
р — символ дифференцирования, можно записать в форме разностного
уравнения (уравнения в конечных разностях)
][][∆][∆][∆
][][∆][∆][∆
1
1
10
1
1
10
n xbn xb...n xbn xb
ny any a...nу anу a
mm
mm
ll
ll
++++=
=++++
−
−
−
−
, (8.11)
где
а
i
, b
i
— постоянные величины, которые определяются физическими
свойствами системы.
Таким образом, система, в которой действуют сигналы в виде решет-
чатых функций, может быть описана с помощью разностных уравнений.
Для решения таких уравнений можно воспользоваться методами классиче-
ской теории разностных уравнений, которые аналогичны методам теории
дифференциальных уравнений. Однако, как и в случае дифференциальных
уравнений, значительно проще использовать для решения разностных
уравнений преобразование Лапласа. Так как аналогом интеграла решетча-
той функции является сумма
∑
∞
=
0
],[
n
п
nTx
то так называемое дискретное преобразование Лапласа
применительно к
разностным уравнениям осуществляется по следующей формуле:
{}
∑
==
∞
=
−
0
п
е ][][Д
п
*
п
n
nTх(р)ХnТх
pnТ
. (8.12)
Здесь Д — символ дискретного преобразования.
Переходя к относительному времени, эту формулу можно записать в
виде
{}
∑
==
∞
=
−
0
е ][][Д *
n
qn
nх(q)Хnх , (8.13)
где
q = p T
п
— новая безразмерная комплексная переменная.
Введем обозначение
z = e
q
. (8.14)
Тогда выражение (8.13) примет следующий вид:
{}
∑
==
∞
=
−
0
][][
n
n
zn х(z)ХnхZ *
. (8.15)
181
Соотношение (8.15) означает, что умножение на z
–n
соответствует за-
держке дискретного сигнала на
n интервалов
В этой форме записи дискретное преобразование Лапласа называется
Z-преобразованием.
Для большинства встречающихся в расчетах решетчатых функций
Z-
преобразование может быть выполнено при помощи таблиц соответствия,
которые приводятся в специальной литературе по импульсным системам.
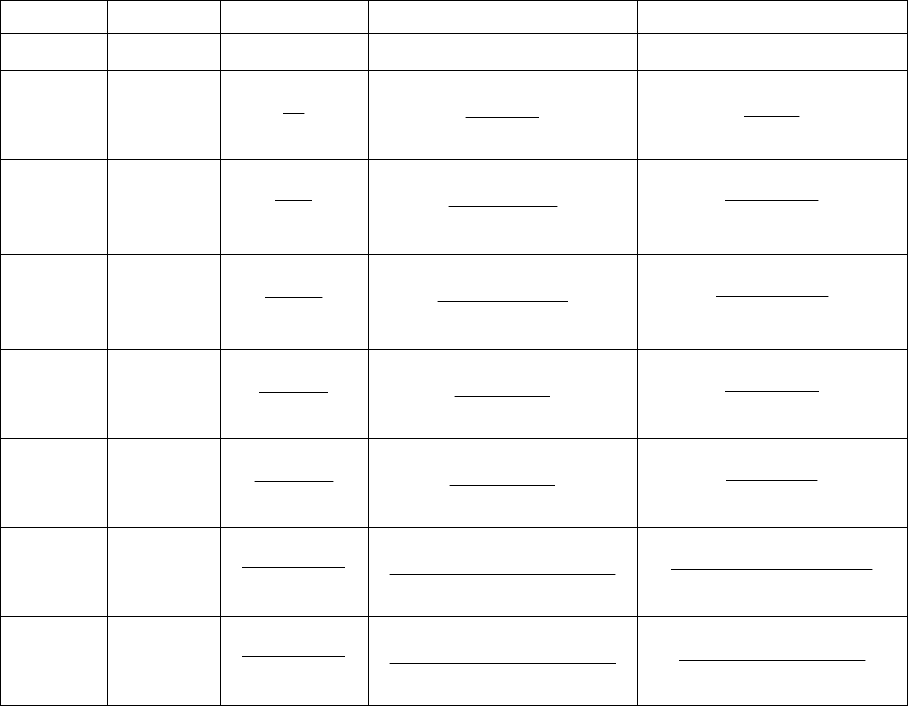
В табл. 8.1 приведено соответствие оригиналов и изображений в аналого-
вом и дискретном преобразованиях Лапласа и
z-преобразование для неко-
торых функций времени.
Таблица 8.1
Соответствия оригиналов и изображений в аналоговом
и дискретном преобразованиях Лапласа и Z-преобразование
x(t) x[n] Х(p) Х
*
(q) Х
*
(z)
)(
t
δ )(nδ
1 1 1
1(t) 1(n)
p
1
1e
e
−
q
q
1−z
z
t n
2
1
p
2
1)(e
e
−
q
q
2
1)−(z
z
t
i
n
i
1
!
+i
p
i
1
1)(
1)(
e
ee
+
−
+
i
q
qq
1
1
1
+
−
+
i
z
zz
)(
)(
tα
e
−
nα
e
−
α
1
+p
α
−
ee
e
q
q
α
e
−
−z
z
tj ω
e
nj ω
e
1
p
j−ω
ωjq
q
ee
e
−
ω
e
j
−z
z
sin ωt sin ωn
22
ω
ω
+p
1ωcos2
ωsin
ee
e
2
+
−
qq
q
1ω cos 2
ωsin
2
+
−
z z
z
cos ωt cos ωn
22
ω+p
p
1ωcos2
ω) cos(
ee
ee
2
+
+
−
qq
qq
2
(cos ω)
2 cos ω 1
zz
zz
−
−
+

182
Главное достоинство и удобство
Z-преобразования заключается в том,
что сама запись
Z-изображения (8.15) указывает простой способ прямого и
обратного преобразования:
1.
Чтобы по известной функции времени х (t) найти оси Z-изображе-
ния, необходимо лишь каждое дискретное значение
х[n] умножить на z
–n
, а
затем свернуть степенной ряд в конечную сумму;
2.
Чтобы по известному изображению Х
∗
(z) найти соответствующий
оригинал
х(t), необходимо представить изображение Х
∗
(z) в виде степенного
ряда по убывающим степеням
z
–n
. Получившиеся при этом числовые коэф-
фициенты ряда и есть дискретные значения
х[n] сигнала х[t]
n
.
Пример 8.1. Найти Z-изображение единичной ступенчатой функции
х(t) = [1].
Решение.
Соответствующая ей последовательность идеальных импульсов
х[n] = 1(n), n = 1, 2, 3, …,
∞
.
В соответствии с вышесформулированным п. 1, изображение
Х
*
(z) = 1 z
0
+ 1 z
–1
+ 1 z
–2
+ …
Сумму этого бесконечного ряда можно записать как
,
1
1
1
1
*
−
=
−
=
−
z
z
z
(z)Х
что соответствует табл. 8.1.
Пример
8.2. Найти функцию х(t), изображение которой
2
*
1)( −
=
z
z
(z)Х
.
Решение.
Делением числителя на знаменатель это выражение можно предста-
вить в виде бесконечного ряда:
...321
321*
+++=
−
−
−
zzz(z)Х