Динкель А.Д. Теория автоматического управления
Подождите немного. Документ загружается.

153
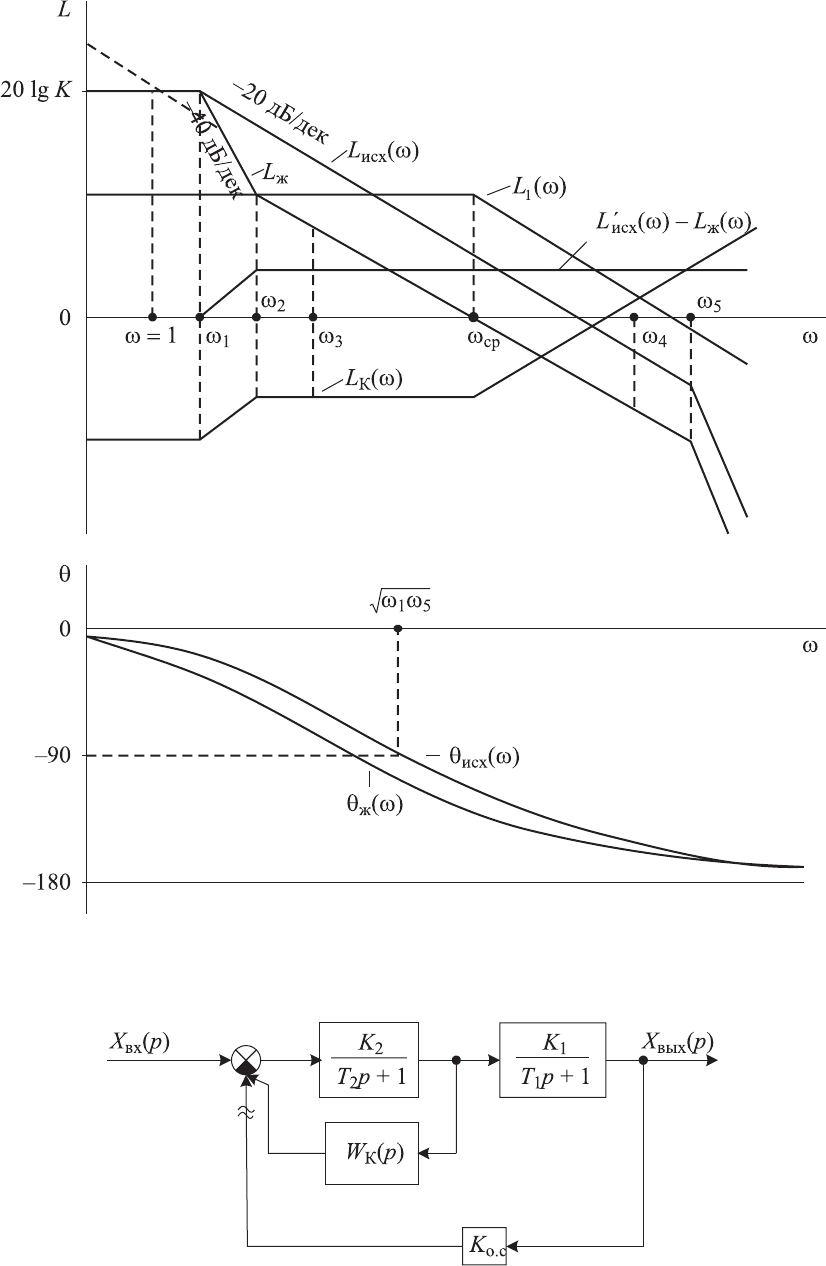
Рис. 6.13. Построение логарифмических частотных характеристик
для синтеза системы с параллельной коррекцией
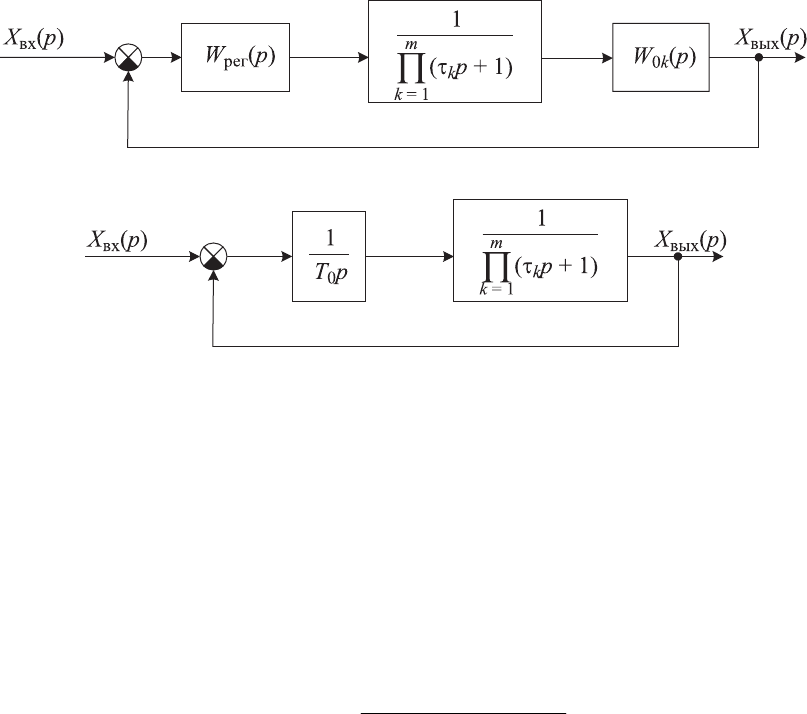
Рис. 6.14. Структурная схема системы автоматического регулирования
с параллельным корректирующим звеном
W
к
(p)
154
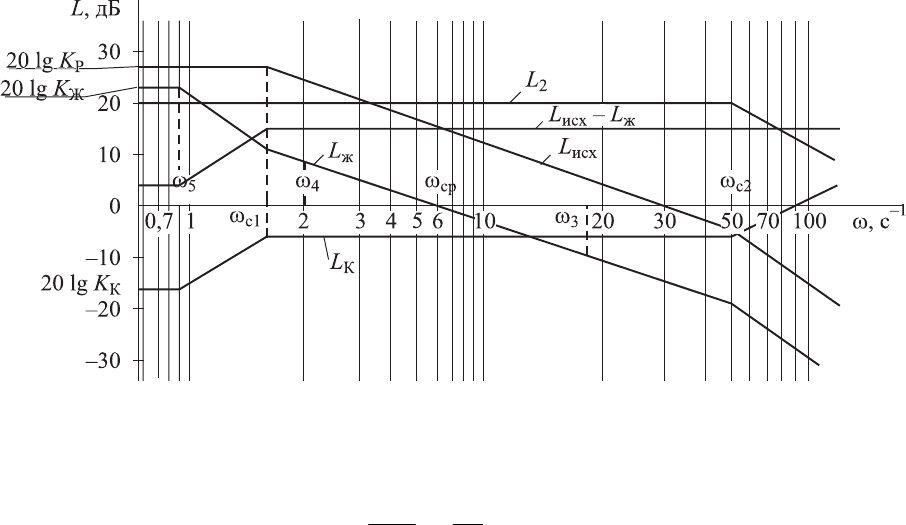
Рис. 6.15. Логарифмические амплитудные частотные характеристики
систем с параллельной коррекцией
с 0,02
50
1
ω
1
с2
5
===T
.
Из условия
дБ 17202326 lg 20 lg 20 lg 20 lg 20
2жисхк
−=−
−
=
−
−= KKKK
,
передаточный коэффициент корректирующего звена
K
к
= 14,1.
155
ГЛАВА 7.
ПРИНЦИП ПОСТРОЕНИЯ И РАСЧЕТА
СИСТЕМ ПОДЧИНЕННОГО
РЕГУЛИРОВАНИЯ
Развитие техники регулирования открыло большие возможности для
совершенствования средств и методов управления автоматизированными
электроприводами, электромеханическими системами, в структуру кото-
рых входят, в частности, электроприводы, и для решения задач автомати-
зации технологических процессов. В последние годы характерным направ-
лением является создание унифицированных систем регулирования с по-
следовательной коррекцией активными звеньями, построенными на
опера-
ционных усилителях, как в аналоговом, так и дискретном исполнении.
К основным достоинствам таких систем относятся: возможность реализа-
ции с высокой точностью желаемых передаточных функций и, как следст-
вие, достижение хороших динамических показателей процесса регулиро-
вания, малая мощность сигналов управления, что позволяет применять
датчики и задатчики регулируемых параметров с малой
потребляемой
мощностью; легкость и простота наладки; возможность широкой унифика-
ции схем и конструкций элементов, в том числе различного рода сопря-
гающих и других устройств.
Система подчиненного регулирования с последовательной коррекци-
ей представляют собой многоконтурную систему последовательного дей-
ствия. Каждый контур этой системы имеет отдельный регулятор, выпол-
няющий функции последовательного корректирующего звена
, который на-
страивается в соответствии с передаточной функцией объекта регулирова-
ния этого контура.
Отличительной особенностью систем подчиненного регулирования по-
следовательного действия является подчиненное регулирование основных
параметров объекта регулирования. Число соподчиненных контуров регу-
лирования, а следовательно, и число регуляторов, равно числу регулируе-
мых параметров объекта. На вход каждого регулятора подаются сигналы
за-
данного и действительного значений регулируемого параметра, при этом

156
регулятор предыдущего контура, начиная с первого внешнего контура, вы-
рабатывает сигнал задания для последующего контура. Способ подчиненно-
го регулирования позволяет легко вводить ограничения параметров, а также
относительно просто осуществлять расчет и реализацию систем.
Системы последовательного действия, называемые далее системами
подчиненного регулирования, получают все более широкое распростране-
ние и реализуются в форме унифицированных блочных систем регулято-
ров (УБСР) и комплектных устройств управления.
7.1. ОБОБЩЕННАЯ СТРУКТУРНАЯ СХЕМА
И ПЕРЕДАТОЧНАЯ ФУНКЦИЯ СИСТЕМЫ
ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ
Принцип построения систем подчиненного регулирования состоит
в том, что объект регулирования в общем случае разбивается на
n подобъ-
ектов, включенных последовательно, каждый из которых представляет со-
бой, как правило, типовое динамическое звено с соответствующим выход-
ным параметром, перед которыми последовательно (каскадно) включаются
n регуляторов, а каждый регулятор с соответствующим подобъектом охва-
тывается отрицательной обратной связью и, таким образом, организуется
n
контуров регулирования. Обобщенная структурная схема системы подчи-
ненного регулирования, построенная по данному принципу, приведена на
рис. 7.1. Согласно этой схеме, на входе каждого регулятора соответствую-
щего контура регулирования осуществляется сравнение сигналов, пропор-
циональных заданному и действительному значениям входного сигнала
(координаты) данного контура, а выходной сигнал регулятора является за-
дающим сигналом для
последующего внутреннего контура. Таким обра-
зом, в подчиненной системе регулирования образуется
n соподчиненных
контуров регулирования соответствующих параметров.
В рассматриваемых системах каждый контур регулирования содер-
жит, как правило, только одну большую постоянную времени, компенси-
руемую регулятором, что значительно упрощает структуру регулятора,
синтез системы в целом и позволяет применять однотипные регулирующие
элементы.
157
Согласно структурной схеме, приведенной на рис. 7.1, каждый контур
системы можно представить в виде двух звеньев — регулятора и подобъ-
екта регулирования. Объект регулирования контура включает в себя один
из подобъектов, на которые разбит объект регулирования, и замкнутый
контур регулирования, являющийся внутренним по отношения к рассмат-
риваемому контуру.
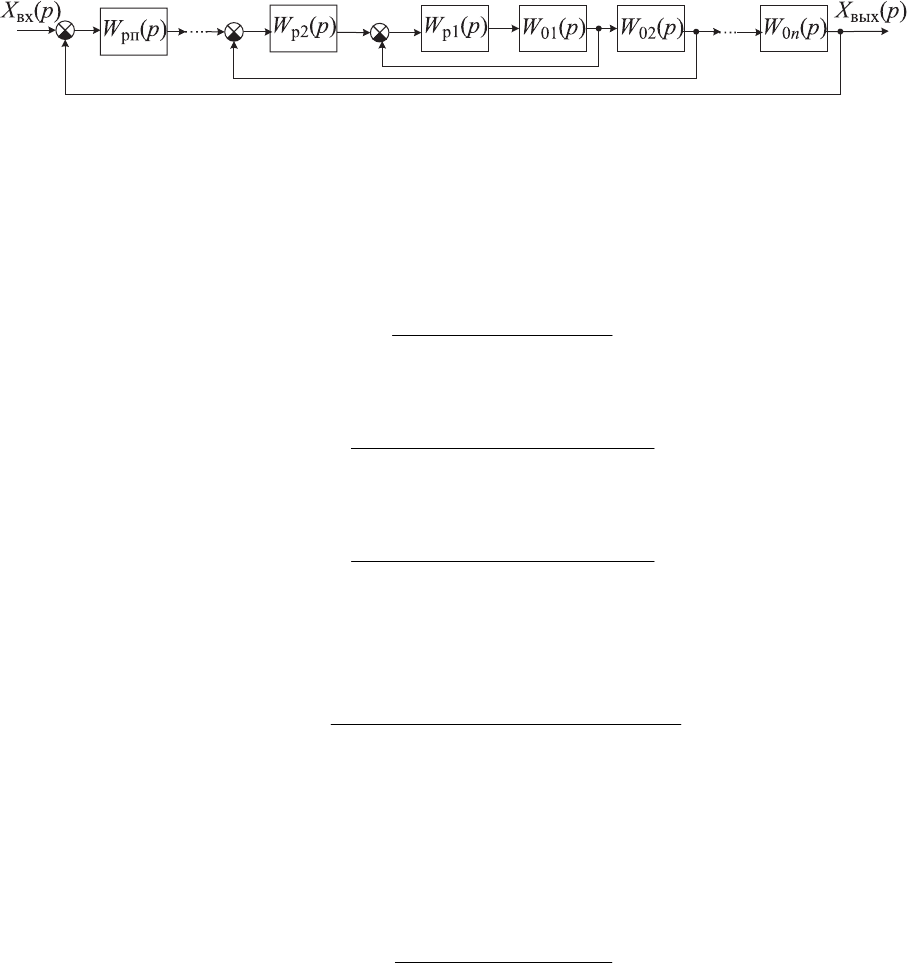
Рис. 7.1. Структурная схема системы подчиненного регулирования
с последовательной коррекцией
Передаточные функции замкнутых контуров регулирования в соот-
ветствии с обозначениями на рис. 7.1 запишутся в следующем виде:
(р)(p)WW
(p)(р)WW
(p)W
011рег
011рег
з1
1 +
= ;
(р)(р)W(p)WW
(p)(р)W(р)WW
(p)W
02з12рег
02з12рег
з2
1 +
= ;
(р)(р)W(p)WW
(p)(р)W(р)WW
(p)W
03з23рег
03з23рег
з3
1 +
=
;
…………………………………….
(р)(р)W(p)WW
(p)(р)W(р)WW
(p)W
nnn
nnn
n
01)з(рег
01)з(рег
з
1
−
−
+
= .
Из этих выражений для передаточных функций замкнутых контуров
регулирования следует, что передаточную функцию любого конура регу-
лирования можно представить в следующем виде:
(р)W(p)W
(p)W(р)W
(p)W
ii
ii
i
0рег
0рег
з
1
′
+
′
= , (7.1)
где
i(ii
WW
'
W
01)з0 −
= — передаточная функция объекта регулирования
соответствующего контура.

158
Исходя из полученной передаточной функции следует, что переда-
точные функции всех контуров идентичны и определение структуры и па-
раметров регуляторов выполняется по одной методике. Необходимо отме-
тить, что объектом регулирования первого внутреннего контура является
первый из подобъектов регулирования, на которые разбит общий объект
регулирования, т. е.
0101
WW =
'
.
Кроме этого, необходимо отметить, что в данной структуре имеется
возможность ограничения любого регулируемого параметра или его про-
изводных на постоянном и изменяемом уровне путем введения в структуру
соответствующего контура дополнительного нелинейного звена или до-
полнительного нелинейного контура регулирования.
7.2. ПЕРЕДАТОЧНАЯ ФУНКЦИЯ РЕГУЛЯТОРА
Рациональные законы управления в каждом конкретном случае опре-
деляются желаемыми показателями качества процесса регулирования, тех-
нологическими требованиями с учетом ограничений на регулируемые па-
раметры, энергетическими возможностями элементов и устройств системы
регулирования и др. Эти факторы в совокупности с возмущениями явля-
ются определяющими при выборе структуры контуров и расчете парамет-
ров системы
подчиненного регулирования. Структура регуляторов зависит
от структуры подобъекта и ограничений, а расчет параметров системы
подчиненного регулирования по сути своей сводится к последовательной
оптимизации всех соподчиненных контуров регулирования. В данном слу-
чае под оптимизацией понимается приведение передаточной функции кон-
тура регулирования в соответствие с поставленными требованиями.
В общем случае передаточную функцию
объекта регулирования в лю-
бом из замкнутых контуров системы подчиненного регулирования можно
представить в следующем виде:
(p)W
р
(p)W
ii
m
k
0
к
0
1
1)(τ
1
'
∏
+
=
=
. (7.2)
В этом выражении второй сомножитель
W
0i
(p) — передаточная функ-
ция звеньев, определяющих инерционность объекта контура регулирова-

159
ния, т. е. звеньев с большими постоянными времени, а первый сомножи-
тель — это произведение передаточных функций эквивалентных аперио-
дических звеньев с малыми постоянными времени, существенно не
влияющими на динамические свойства объекта.
Исходя из такой структуры объекта регулирования, суть оптимизации
любого соподчиненного контура регулирования заключается в компенса-
ции больших постоянных времени
и достижении, с учетом малых посто-
янных времени, требуемых динамических свойств замкнутого контура за
счет соответствующих структуры и параметров регулятора.
Остановимся подробнее на вопросе компенсации постоянных времени
объекта регулирования. Рассмотрим простейший случай, когда объект ре-
гулирования представляет собой апериодическое звено первого порядка
1
00
+
==
Тр
K
(р)W(p)W
'
, (7.3)
где
K и Т — соответственно коэффициенты усиления и постоянная време-
ни звена.
Очевидно, что для полной компенсации постоянной времени, т. е.
трансформации апериодического звена в безынерционное (усилительное),
регулятор, включенный последовательно с объектом, должен иметь пере-
даточную функцию
1
рег
+
=
Тр(р)W . (7.4)
Исходя из этого, передаточная функция разомкнутого контура регу-
лирования
K(р)(р)WW(р)W
=
=
0реграз
, (7.5)
11
раз
раз
з
+
=
+
=
K
K
W
W
(р)W
. (7.6)
Контур регулирования получился безынерционным статическим. Фи-
зически это означает, что для мгновенного изменения выходного параметра
инерционного звена на его вход необходимо подать сигнал в виде импульса
с бесконечно большой амплитудой, что реализовать нельзя из-за ограничен-
ности энергетических возможностей регулятора. В связи с этим абсолютная
компенсация инерционности технически невозможна, и
можно говорить
только о степени приближения к этой компенсации. Однако по мере при-
ближения к ней снижается помехозащищенность контура регулирования.

160
Таким образом, предел приближения к абсолютной компенсации ог-
раничивается энергетическими возможностями элементов и устройств сис-
темы регулирования и требованиями помехозащищенности отдельных
контуров и системы регулирования в целом.
Ограничения предельного быстродействия в рассматриваемом случае
можно достичь введением в контур регулирования фиктивного интегри-
рующего звена с постоянной времени
Т
0
за счет регулятора. Тогда переда-
точная функция регулятора примет следующий вид:
рKТ
Тр
(р)W
0
рег
1
+
= . (7.7)
Соответственно передаточные функции разомкнутого и замкнутого
контуров, согласно (7.5) и (7.6) будут следующими:
рТ
(р)W
0
раз
1
= ; (7.8)
1
1
0
з
+
=
рТ
(р)W
. (7.9)
В этом случае замкнутый контур обращается в апериодическое звено,
а статическая ошибка замкнутого контура сводится к нулю. Постоянную
времени
Т
0
в дальнейшем будем называть постоянной интегрирования
контура
Т
и
.
Результатом компенсации в рассмотренном случае явилась замена ра-
зомкнутого контура интегрирующим звеном с постоянной интегрирования
Т
и
, а замкнутого контура апериодическим звеном с постоянной времени Т
0
и коэффициентом усиления, равным единице.
В любом случае структура (передаточная функция) регулятора опре-
деляется структурой (передаточной функцией) объекта компенсации
()
рW
0
′
. При этом в зависимости от вида передаточной функции получается
в основном три типа регуляторов.
Если объектом является интегрирующее звено
()
рТ
рW
и
0
1
= , (7.10)
то из условия компенсации
Т
и
передаточная функция регулятора
161
0
и
рег
Т
Т
(р)W
= . (7.11)
В этом случае регулятор называется пропорциональным (П-регулятор).
Если объектом является инерционное звено первого порядка
()
1
0
+
=
Тр
K
рW
, (7.12)
то передаточная функция регулятора равна
рKТKТ
Т
рКТ
Тр
(р)W
000
рег
11
+=
+
= . (7.13)
В этом случае передаточная функция регулятора включает в себя две
составляющие — пропорциональную и интегральную, в соответствии с чем
регулятор называется пропорционально-интегральным (ПИ-регулятор).
Если объектом является инерционное звено второго порядка
()
1
2
22
1
0
++
=
рТрТ
K
рW
, (7.14)
то передаточная функция регулятора
0
2
1
00
2
0
2
22
1
рег
1
1
КТ
рТ
рКТКТ
Т
рКТ
рТрТ
(р)W
++=
++
=
. (7.15)
В этом случае передаточная функция регулятора включает в себя три
составляющие, в соответствии с чем регулятор называется пропорцио-
нально-интегрально-дифференциальным (ПИД-регулятор). Независимо от
структуры объекта, при изложенном принципе выбора регулятора, переда-
точные функции разомкнутого и замкнутого контуров будут следующими:
рТ
(р)W
0
раз
1
= ; (7.16)
1
1
0
з
+
=
рТ
(р)W
. (7.17)
Таким образом, на основании изложенного выше можно заключить,
что в результате точной компенсации постоянных времени объекта регу-
лирования, независимо от его структуры, и введения в контур регулирова-
162
ния, в структуру регулятора, фиктивного интегрирующего звена, переда-
точная функция и параметры разомкнутого и замкнутого контуров описы-
ваются выражениями (7.16) и (7.17).
Рис. 7.2. Исходная (
а) и преобразованная (б) структурные схемы
контура регулирования
Реальные объекты регулирования в общем случае могут включать в
себя звенья, как с большими, так и с малыми постоянными времени, как
показано на рис. 7.2,
а. Если структура и параметры регулятора выбраны
из условия компенсации больших постоянных времени, входящих в
W
0k
(р),
то структурная схема контура регулирования принимает вид, представлен-
ный на рис. 7.2,
б, и передаточная функция разомкнутого контура
()
1)(τ
1
1
0
раз
+
∏
=
=
m
k
ррТ
рW
k
. (7.18)
При
∑
>
=
m
k
k
Т
1
2τ
0
без существенной погрешности, пренебрегая члена-
ми высшего порядка, можно принять
∏
∑
+=+≈+
=
=
m
k
m
k
ррр
kk
1
1
1 σ1τ1)(τ , (7.19)
где
∑
=
=
m
k
k
1
τσ — сумма малых постоянных времени объектов регулирова-
ния в контуре.