Белов А.В., Коровин Ю.В. Устойчивость электрических систем
Подождите немного. Документ загружается.

21
Анализ выражения (1.6.15) показывает, что при небольшом изме-
нении относительной скорости
d
dt
δ
можно принять
.
P M
∗ ∗
=
(1.6.16)
Выражение (1.6.16) справедливо при малых изменениях скорости
ротора (качаниях, начальной стадии выпадения из синхронизма и
т.д.).
Ускорение
Ускорение ротора характеризуется соотношением
0
.
d M
a
dt J
∆Ω ∆
= =
(1.6.17)
где
∆Ω
– относительная угловая скорость,
M
∆
– избыток вращающе-
го момента,
0
J
– момент инерции.
Из (1.6.17) следует:
2
2
0
0
2
0
0
.
2
2
j
M
d M
dt T
J
∆ ⋅Ω
∆Ω ∆
= = ⋅Ω
Ω
⋅
(1.6.18)
Здесь
2
0
0
2
2
j
T J
Ω
=
– постоянная инерции, равная удвоенной кинети-
ческой энергии, запасенной ротором при движении с синхронной ско-
ростью
0
Ω
. Она в данном случае имеет размерность кг·м
2
·с
–2
.
Если перейти от механической скорости к электрической и от
момента к мощности, подставив в (1.6.18) соотношения
;
p
m
∆ω
∆Ω=
0
0
;
p
m
ω
Ω =
0
P
M
∆
∆ =
Ω
,
то можно записать
0
.
j
d P
a
dt T
∆Ω ∆
= = ⋅ω
или
0
314 .
j j
P P
a
T T
∆ ∆
= ⋅ω =
(1.6.19)
Если
P
∆
выражено в тыс. кВт, то
j
T
– в тыс.кВт·с,
a
– в рад/ с
2
.
Подставив в (1.6.19)
0
ω
в градусах, получим
22
0
360
314 18000 ,
2
j j j
P P P
a
T T T
∆ ∆ ∆
= ⋅ω = ⋅ ⋅ = ⋅
π
(1.6.20)
где
a
– в град/ с
2
.
Разделив числитель и знаменатель выражения (1.6.19) на базис-
ную мощность, запишем ускорение
2
2
314 ,
j
P
d
a
dt T
∗
∆
δ
= = ⋅
(1.6.21)
где
a
– в град/ с
2
,
δ
– в рад,
t
– в секундах,
j
T
– в секундах,
или
2
2
18000 ,
j
P
d
a
dt T
∗
∆
δ
= = ⋅
(1.6.22)
где
a
– в град/ с
2
,
δ
– в градусах,
t
– в секундах,
j
T
– в секундах.
При расчетах устойчивости необходимо приводить величину
j
T
к
базисным условиям по выражению:
ном
ном
б
j j
S
T T
S
=
(1.6.23)
Возвращаясь к уравнению движения ротора генератора (1.6.4),
запишем некоторые его варианты:
2
Т эл
2
0
360
j
T
d
P P
f dt
δ
⋅ = −
⋅
(1.6.24)
где
δ
– в градусах,
t
– в секундах,
j
T
– в секундах,
T
P
и
эл
P
– в отно-
сительных единицах.
( )
2
0
Т эл
2
j
d
T P P
dt
δ
⋅ =ω −
(1.6.25)
где
δ
– в радианах,
t
– в секундах,
j
T
– в секундах,
T
P
и
эл
P
– в отно-
сительных единицах.
Пример 1.6.1. Расчет постоянной инерции генератора
Рассчитаем постоянную инерции силового агрегата генератор –
турбина для генератора типа ТВФ-120-2У3 (см. п. 1.3). По условию
имеем
2 2
Г
13 тЧ
м
GD
=
. Неизвестен тип приводного двигателя (турби-
ны), но известно, что обычно его маховой момент превышает махо-
вой момент генератора примерно в 15-3 раза, тогда ориентировочно
2 2 2 2
ГА Г ПД
13 2 13 39
т м .
GD GD GD
= + ≈ + ⋅ = ⋅
23
Постоянную инерции агрегата рассчитаем по формуле (1.6.2):
2 2 2
ГА
ном
ном
2,74
2,74 39 3000
8,01c.
1000 1000 120000
j
GD n
T
S
⋅
⋅ ⋅
= = =
⋅ ⋅
1.7 Внешняя характеристика мощности генератора с АРВ
Рассмотрим простейшую систему, расчетная схема которой пока-
зана на рисунке 1.3.1. Схема замещения простейшей СЭС представ-
лена на рисунке 1.3.3.
Все сопротивления, находящиеся вне генератора, назовем внеш-
ним сопротивлением:
Л1
вн T
;
2
x
x x= +
ɺ
ɺ ɺ
(1.7.1)
Зная
0
U
ɺ
, можем записать:
Г вн
;
U U
х I
= + ⋅
ɺ ɺ ɺ
ɺ
(1.7.2)
(
)
вн
;
d d
E U
х х I U x I
Σ
= + + ⋅ = + ⋅
ɺ ɺ ɺ ɺ ɺ
ɺ ɺ ɺ
(1.7.3)
Проследим на примере изменение характеристик генератора при
постоянном токе возбуждения и, соответственно, постоянной ЭДС
генератора
(
)
const
E =
.
Пример 1.7.1
За основу возьмем систему, схема замещения которой представ-
лена на рисунке 1.3.3. Определим внешнее сопротивление, напряже-
ние на выходе генератора и его ЭДС по формулам (1.7.1) – (1.7.3):
Л
1
вн
T
0,734
0,44 0,807;
2 2
x
j
x x j j= + = + =
ɺ
ɺ ɺ
Г вн
12,37
0,97 (0,309 0,208) 0,807
1,138 0,25 1,165 e ;
j
U U I х j j
j
°
= + ⋅ = + − ⋅ =
= + = ⋅
ɺ ɺ ɺ
ɺ
43,735
0,97 (0,309 0,208) 8,435
2,727 2,609 3,774 e ;
q
q
j
E U I х j j
j
Σ
°
= + ⋅ = + − ⋅ =
= + = ⋅
ɺ ɺ ɺ
ɺ
Теперь представим, что угол нагрузки
δ
увеличился с
0
43,735
δ = °
до
01
60
δ = °
. Тогда новое значение ЭДС генератора бу-
24
дет
60
3,774 e .
j
q1
E
°
= ⋅
ɺ
Определим новые значения тока и напряжения
на выходе генератора, используя выражения (1.7.3) и (1.7.2):
1
15,671
1
0,387 0,109 0,402 e ;
q
j
d
E U
I j
x
− °
Σ
−
= = − = ⋅
ɺ ɺ
ɺ
ɺ
16,468
Г1 1 вн
1,058 0,313 1,103 e .
j
U U I х j
°
= + ⋅ = + = ⋅
ɺ ɺ ɺ
ɺ
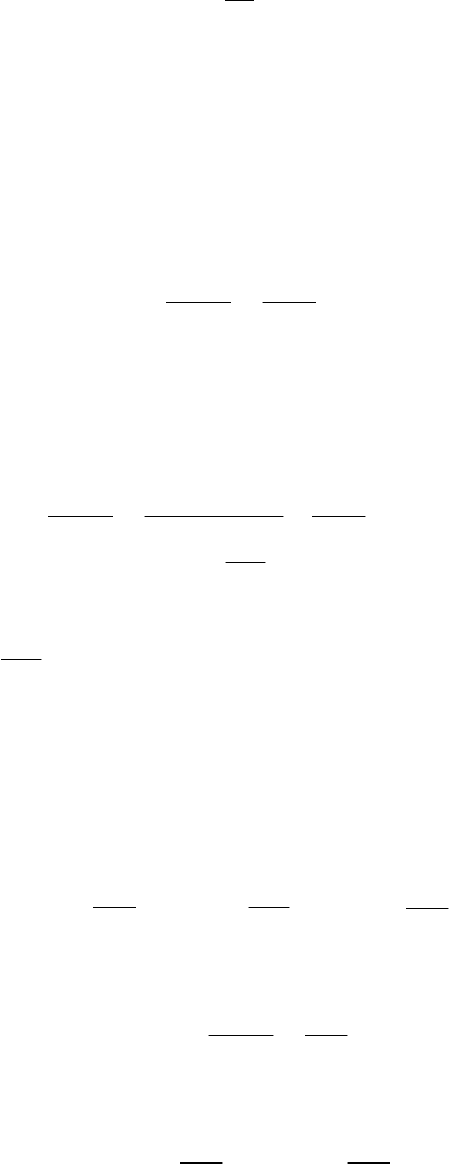
Результаты отразим на векторной диаграмме (рисунок 1.7.1).
43,735
3,774
j
q
E e
+ °
= ⋅
ɺ
0,97
U
=
33,954
0,373I e
− °
= ⋅
12,37
Г
1,165
j
U е
+ °
= ⋅
ɺ
39,195
δ = °
Г
12,37
δ = °
60
1
3,774
j
q
E e
+ °
= ⋅
ɺ
16,47
Г2
1,165
j
U е
+ °
= ⋅
ɺ
01
60,0
δ = °
16,47
Г1
1,103
j
U е
+ °
= ⋅
ɺ
53,983
2
4,268
j
q
E e
+ °
= ⋅
ɺ
+
j
+
33,954
ϕ= − °
02
53,98
δ = °
Рисунок 1.7.1 – Векторная диаграмма простейшей системы
Выводы: При увеличении угла нагрузки
(
с
43,735
до
60º)
ток в
системе увеличивается
(
с
0,373
до
0,402),
а угол φ по абсолютной
25
величине уменьшается (с 33,954 до 15,671º). Отдаваемая генера-
тором активная мощность при этом не изменяется
1
1
3,774 0,97
sin 0,434 sin .
8,435
( ) sin
q
d
E U
P
x
Σ
⋅
δ= ⋅ δ
δ = δ=
Уменьшение угла φ по абсолютной величине свидетельствует о
том, что отдаваемая реактивная мощность с увеличением нагруз-
ки уменьшается. Её можно определить по выражению
2
cos( )
q
d d
E U
U
Q
x x
Σ Σ
δ = δ−
(1.7.4)
или в нашем случае
2
1
cos 0,434 cos 0,1115.
( )
q
d d
E U
U
Q
x x
Σ Σ
= ⋅ δ−δ = δ−
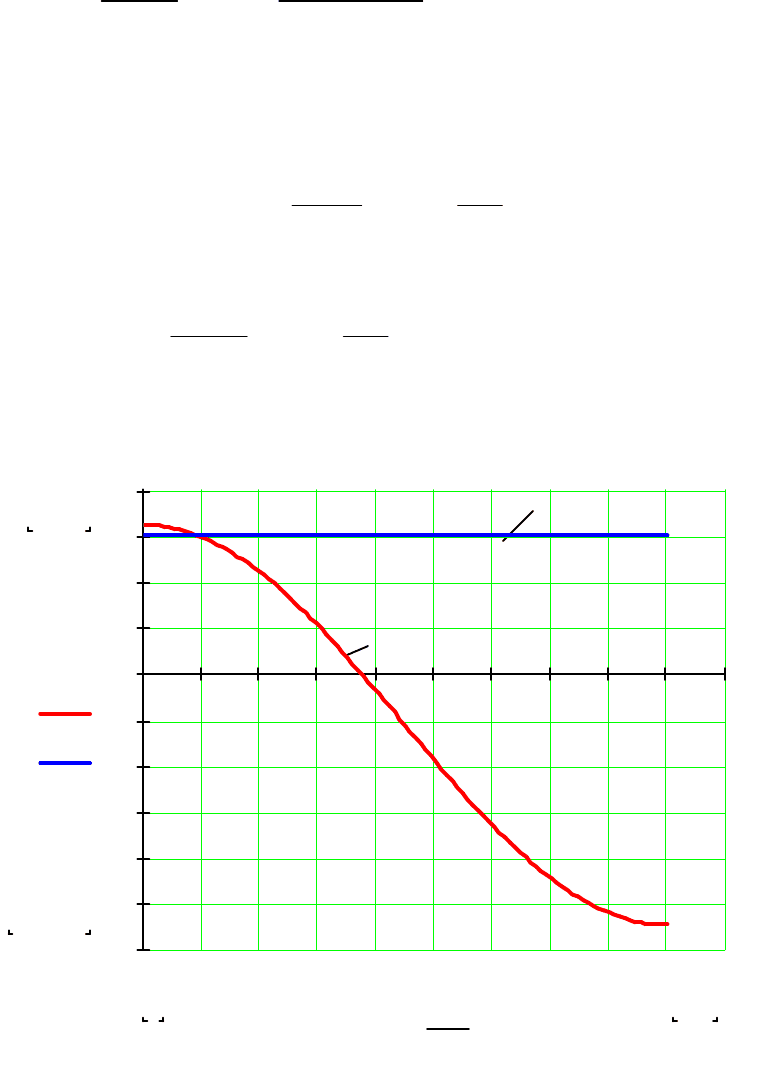
Характеристика реактивной мощности представлена на рисунке
1.7.2.
Q
δ
0
P
( )
Q
δ
0 20 40 60 80 100 120 140 160 180 200
0.6−
0.5−
0.4−
0.3−
0.2−
0.1−
0.1
0.2
0.3
0.4
0.322
0.545−
Q δ( )
P0
1800
δ
180
π
⋅
Рисунок 1.7.2 – Характеристика реактивной мощности
Кроме того, можно сделать вывод о том, что напряжение на
шинах генератора при увеличении нагрузки снижается (в нашем
случае с 1,165 до 1,103).
26
Теперь предположим, что генератор снабжен автоматическим ре-
гулятором возбуждения (АРВ), который контролирует величину на-
пряжения на шинах генератора
Г
U
. При понижении этого напряже-
ния регулятор увеличивает ток возбуждения, а вместе с ним и ЭДС
q
E
ɺ
до тех пор, пока не восстановит прежнее значение напряжения.
Рассмотрим следующий пример.
Пример 1.7.2
Взяв за основу систему, представленную в примере 1.7.1, пред-
ставим, что напряжение на шинах генератора при увеличении угла
нагрузки не уменьшилось
Г2 Г
1,165
U U
= =
, а в результате действия
АРВ сохранило свое значение по модулю, при этом угол
Г
δ
увели-
чился. Примем, что новое значение напряжения равно
16,47
Г2
1,165
j
U e
°
= ⋅
ɺ
. Определим новые значения тока, ЭДС и активной
мощности, используя выражения (1.7.2), (1.7.3) и (1.4.2):
24,038
Г2
2
вн
0,409 0,183 0,448 e ;
j
U U
I j
x
− °
−
= = − = ⋅
ɺ ɺ
ɺ
ɺ
53,983
2
2,51 3,452 4,268 e ;
j
q2 d
E U I
х
j
°
Σ
= + ⋅ = + = ⋅
ɺ ɺ ɺ
ɺ
2
2
4,268 0,97
sin 0,49 sin .
8,435
( ) sin
q
d
E U
P
x
Σ
⋅
δ= ⋅ δ
δ = δ=
В результате расчетов можно сделать следующие выводы:
При условии постоянства напряжения на шинах генератора
(
)
Г
const
U
=
, с увеличением нагрузки увеличивается ЭДС генера-
тора. При этом генератор с одной характеристики активной
мощности
1
0,434 sin
( )
P
= ⋅ δ
δ
переходит на более мощную
2
0,49 sin .
( )
P
= ⋅ δ
δ
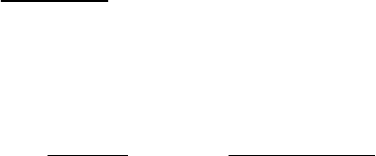
На рисунке 1.7.3 показано семейство характеристик
( )
P
δ
, по-
строенных для различных значений ЭДС
Е
ɺ
.
27
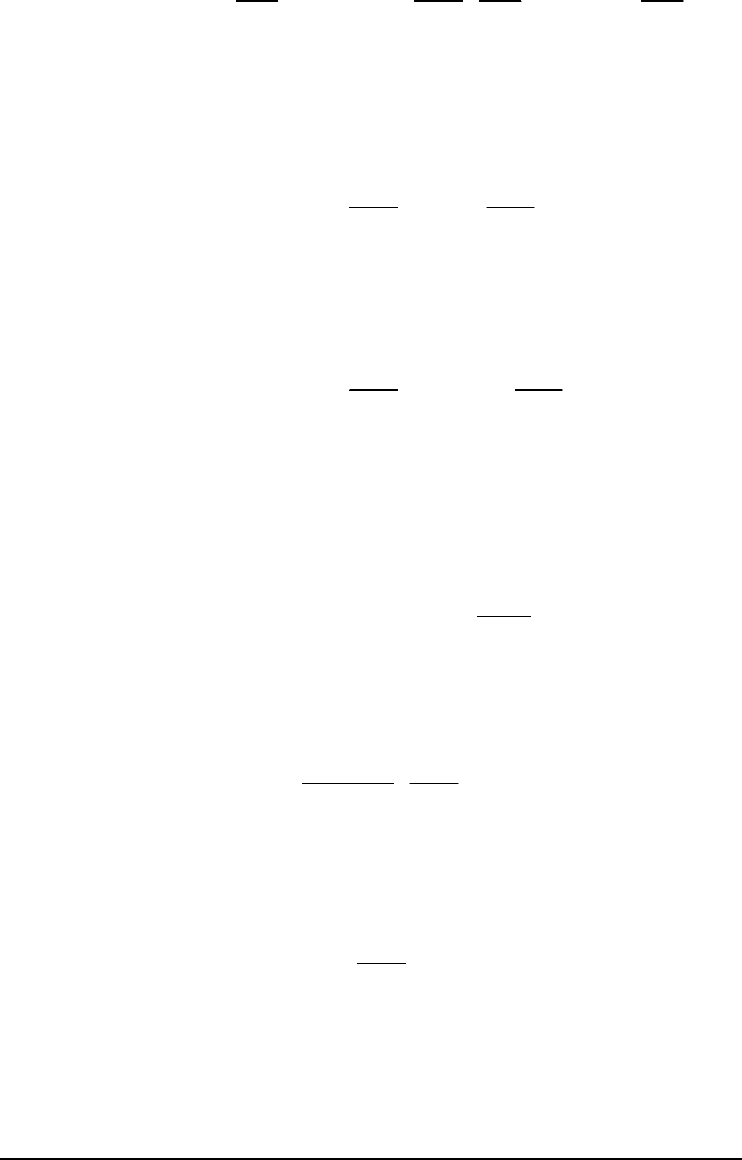
Рисунок 1.7.4 – Внешняя характеристика генератора, оснащенного АРВ
Если принять за исходную точку нормального режима точку
a
,
то при увеличении отдаваемой мощности
0
P
, сопровождающемся
увеличением угла
δ
, точки новых установившихся режимов будут
определяться переходом с одной характеристики на другую в соот-
ветствии с векторной диаграммой. Соединив между собой точки ус-
тановившихся режимов при разных уровнях возбуждения, получим
внешнюю характеристику генератора с АРВ.
Она возрастает даже в области
90
δ> °
, и её максимум достигает-
ся при
Г
90
δ = °
, где
Г
δ
– угол вектора напряжения на шинах генера-
тора
Г
U
. Но возможность работы в области углов больше
90
δ> °
за-
висит от типа регулятора возбуждения.
В регуляторах, имеющих зону нечувствительности следует при-
нять предельным значение
90
δ= °
. При
90
δ> °
такая система неус-
тойчива.
Критерием статической устойчивости является знак синхронизи-
рующей мощности
28
C
0
dP
S
d
= >
δ
(1.7.5)
Синхронизирующая мощность определяется по касательной не к
внешней характеристике, а к соответствующей внутренней характе-
ристике.
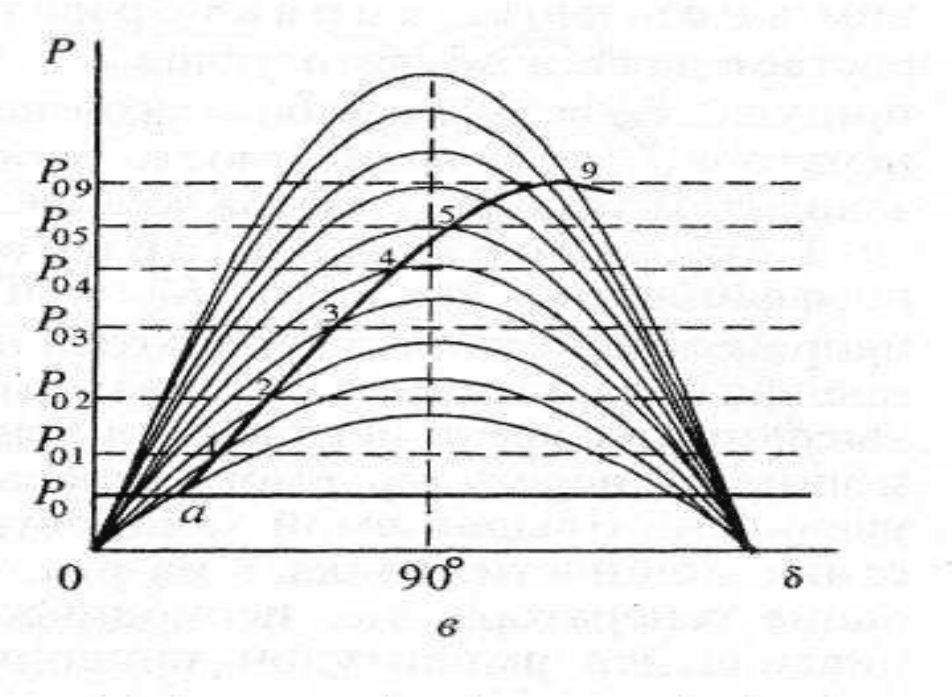
1.8 Угловые характеристики мощности генераторов с АРВ
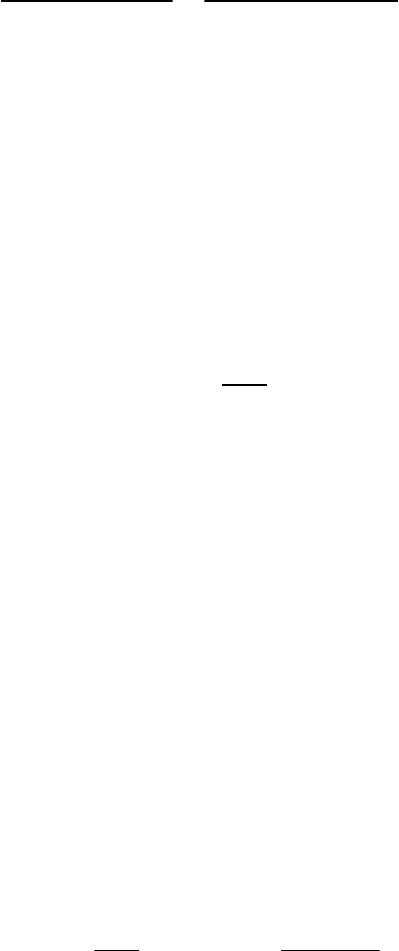
Упрощенная блок-схема генератора с АРВ представлена на ри-
сунке 1.8.1
ОС
В
I
ЭТ
U
Г1
u
−
У
ОВ
Г
U
R
u
∆
+
−
В
U
ТН
Рисунок 1.8.1 – Блок-схема АРВ
Напряжение на шинах генератора измеряется трансформатором
напряжения ТН и, после выпрямления, пропорциональный напряже-
нию сигнал
Г1
u
поступает на элемент сравнения, куда также подается
эталонное напряжение
ЭТ
U
, причем напряжение от генератора
Г1
u
подается со знаком «минус». В нормальном режиме ток возбуждения
B
I
зависит только от заданного напряжения
В
U
. Если произойдет
снижение напряжения на шинах генератора, то эталонное напряжение
ЭТ
U
превысит напряжение
Г1
u
и их разность
u
∆
(в данном случае она
будет положительной) поступит на усилитель У, который создаст до-
полнительное падение напряжения на резисторе R. В результате ток
возбуждения
B
I
увеличится, ЭДС генератора возрастет на величину
q
Е
∆
и, следовательно, увеличится и напряжение на шинах генерато-
ра.

29
При приближенном анализе пренебрегают инерционностью эле-
ментов, входящих в систему автоматического регулирования напря-
жения генератора. Предполагается, что ЭДС генератора
q
E
и ток ро-
тора меняются мгновенно. Отношение
0
q
U
E
K
u
∆
=
∆
называют коэффи-
циентом усиления регулятора. Чем больше отклонение напряжения
на шинах генератора, тем больше будет и приращение ЭДС
q
E
. Та-
кие регуляторы называют автоматическими регуляторами воз-
буждения пропорционального действия (АРВ ПД). В зависимости
от коэффициента усиления
0
U
K
изменение
q
E
и вместе с тем степень
поддержания
Г
U
будут различны. Различна будет и степень измене-
ния
q
E
′
(проекции переходной ЭДС
E
′
на ось
q
). Обычно по услови-
ям устойчивости системы у регуляторов пропорционального дейст-
вия выбирают такой коэффициент усиления
0
U
K
, что
const
q
E
′
=
. Та-
ким образом, у генераторов, имеющих пропорциональное регули-
рование возбуждения, электромеханический переходный процесс
определяется согласно характеристике
P f( )
= δ
при
const
q
E
′
=
.
Такие генераторы в схеме замещения могут быть представлены
проекцией переходной ЭДС
q
E
′
за переходным индуктивным со-
противлением
d
x
′
.
Более сложные системы регулирования реагируют не только на
изменение напряжения на шинах генератора, но и на скорость и даже
ускорение изменения напряжения. Такие регуляторы называют регу-
ляторами сильного действия (АРВ СД).
Регуляторы сильного действия обеспечивают постоянство на-
пряжения на шинах генератора (без риска самораскачивания), поэто-
му генератор, снабженный таким регулятором, может быть пред-
ставлен в расчетах статической устойчивости напряжением на
своих зажимах
Г
U
(или, что еще точнее, проекцией вектора на-
пряжения на ось
q
).
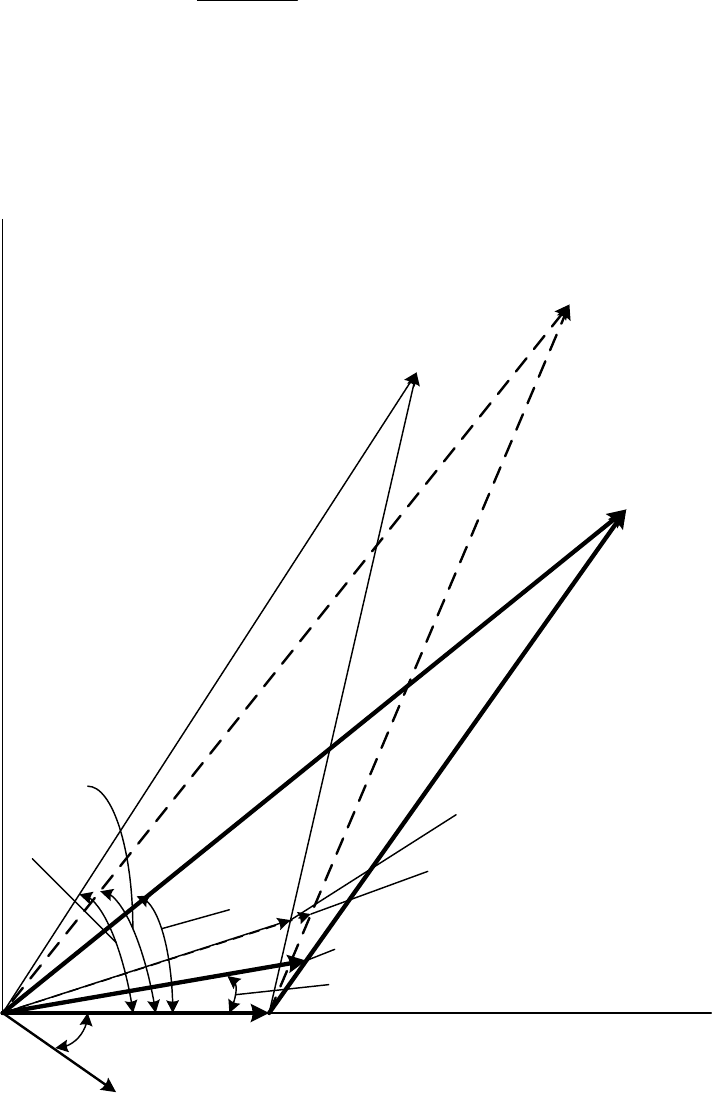
Для системы, схема замещения которой представлена на рисунке
1.3.3 построим векторную диаграмму (рисунок 1.8.2) с указанием
проекций на ось
q
переходной ЭДС и напряжения генератора. Осо-
бенностью данной диаграммы является то, что в ней применены сразу
две системы координат: по осям ротора
d
и
q
, и комплексная
, 1
j
+ +
.
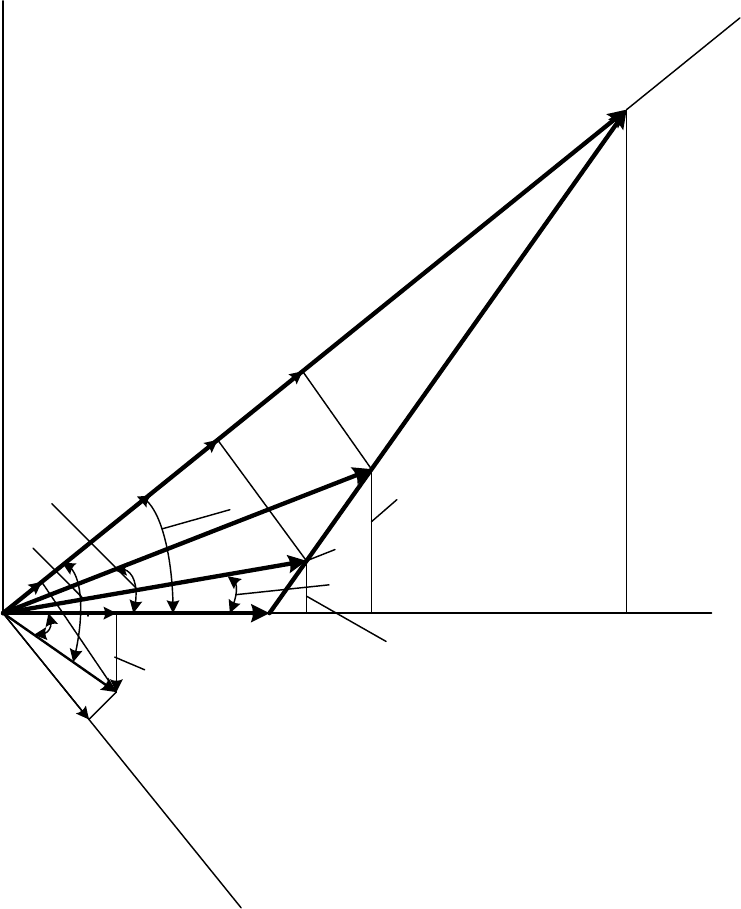
30
При этом для удобства расчетов вектор напряжения
U
направлен по
действительной оси.
На основании диаграммы можно записать
sin
q a d
E I x
Σ
⋅ δ = ⋅
(1.8.1)
sin
a d
E I x
Σ
′ ′ ′
⋅ δ = ⋅
(1.8.2)
Г Г
sin
a
вн
U I x
⋅ δ = ⋅
(1.8.3)
где
a
I
– активная составляющая тока генератора,
cos
a
I I
= ⋅ ϕ
,
d d
вн
x x x
Σ
= +
,
.
d d
вн
x x x
Σ
′ ′
= +
39,195
2,759
j
q
E e
+ °
= ⋅
ɺ
0,97
U
=
33,822
0,238I e
− °
= ⋅
8,66
Г
1,093
j
U е
+ °
= ⋅
ɺ
39,195
δ = °
Г
8,66
δ = °
17,702
′
δ = °
+
j
+
ϕ
d
q
17,702
1,295
j
E e
+ °
′
= ⋅
ɺ
1,205
q
E
′
=
Гq
0,941
U
=
a d
I x
Σ
⋅
a
I
p
I
d
I
q
I
a d
I x
Σ
′
⋅
a
вн
I x
⋅
q
ψ
Рисунок 1.8.2 – Векторная диаграмма простейшей системы
Определив
a
I
из
(1.8.1) – (1.8.3),
и
подставив
его
в
выражение
для
активной
мощности
a
P UI
=
,
получим