Живоглядов В.Г. Теория движения транспортных и пешеходных потоков
Подождите немного. Документ загружается.


тенсивности пропуска ТП 1-1, 2-2, 3-3, 4-4, соответственно при τ
jк
=1,5; 2; 2,1;
2,5 с/ТЕ при увеличении интенсивности прибытия ТС λ
jк
возвышаются в пре-
делах пропускных способностей полос проезжей части, что показано и в
табл. 6.14 колонки 17 и 26 и на рис. 6.32: прямые линии А, В, С, D, соответст-
венно при τ
jк
=1, 5; 2; 2, 1; 2, 5 с/ТЕ. При оптимальных циклах линии интен-
сивности пропуска ТП 1-1, 2-2, 3-3, 4-4 как теоретические, так и эксперимен-
тальные, близки к прямой – линейной функции, возрастающей. С увеличени-
ем неоптимальной длительности
цикла С, при соответствующем росте интенсивности прибытия ТС к стоп-
линии λ
jк
увеличивается φ
j
, т.е. уменьшается разность
0
1
o j
к x jк
j к l
n n
C T
.
При бесконечно больших С и соответственно максимальных λ
jк
разность ме-
жду τ
jк
и 1/
jk
незначительная, чем можно объяснить стремление φ
j
к
λ
maxjк
=1/
jk
.
Изменение кривых весьма наглядно показывает зависимость оптималь-
ного регулирования движения от φ
jк
. Таким образом, С является оптимальной
при условии, что разрешающие такты α
l
(C–T
0
) полностью используются
только для пропуска очереди без остатка и φ
jк
= λ
maxjк
=
0
l
jк
C T
C
. Тем са-
мым поставленные задачи этим решаются полностью.
641
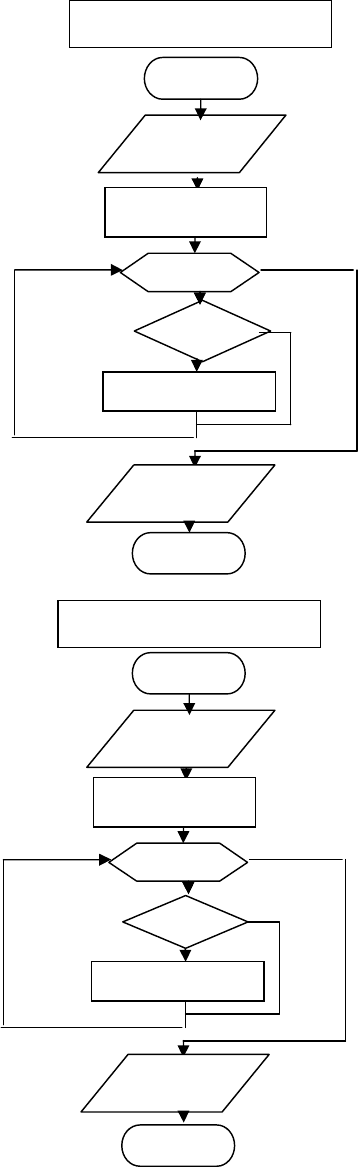
6.7. Экспериментальное исследование
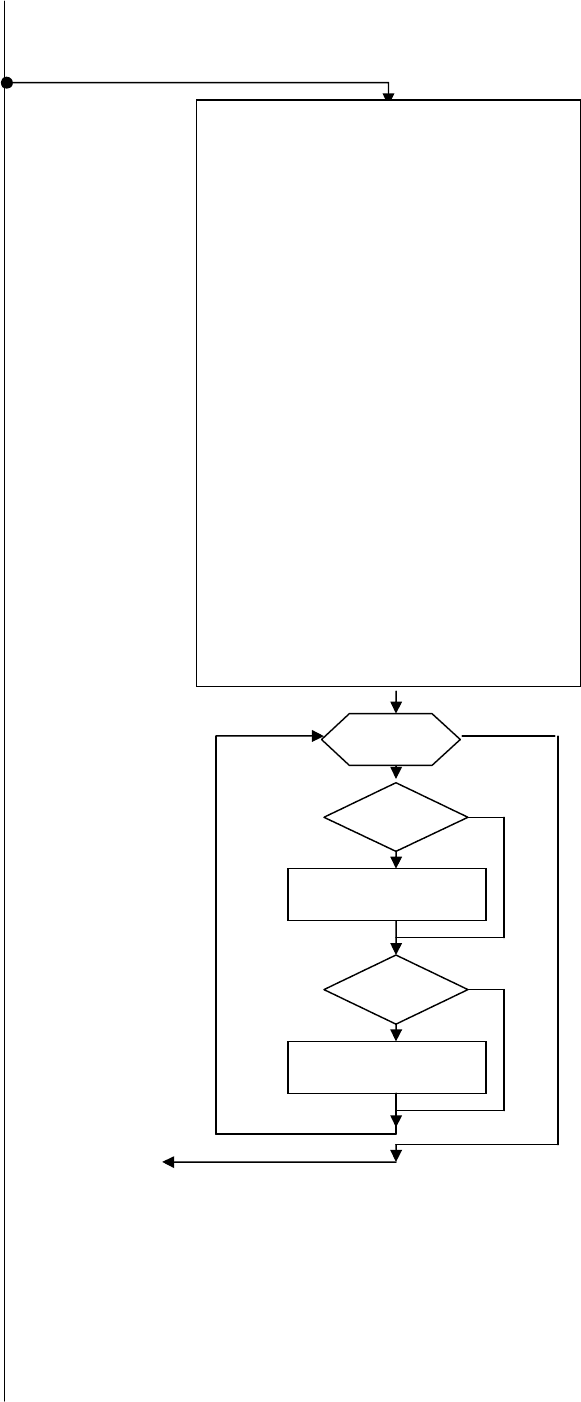
6.7.1. Блок – схема алгоритма исследования оптимальности в режимах
CР
x:=y[j, 1]
k:=2÷n
X<y[j, k]
x:=y[j, k]
да
нет
Начало
Конец
Функция MAX2
Ввод
y, j, n
Вывод
x
x:=y[i, j, 1]
k
:=2÷n
X<y[i, j, k]
x:=y[i, j, k]
да
нет
Начало
Конец
Функция MAX3
Ввод
y, i, j, n
Вывод
x
(1)
(2)
(3)
(4)
(5)
(6)
(1)
(2)
(3)
(4)
(5)
(6)
642
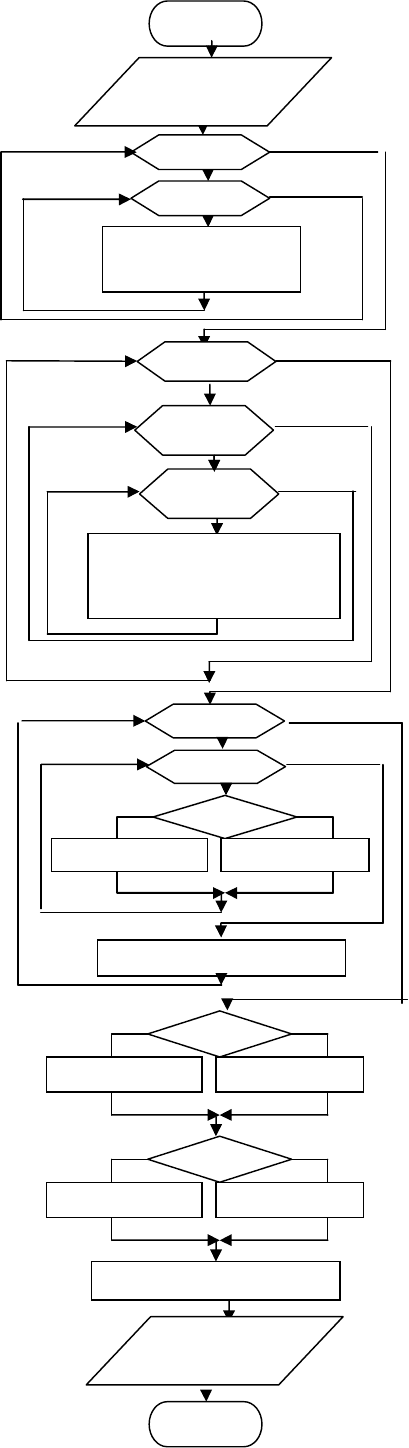
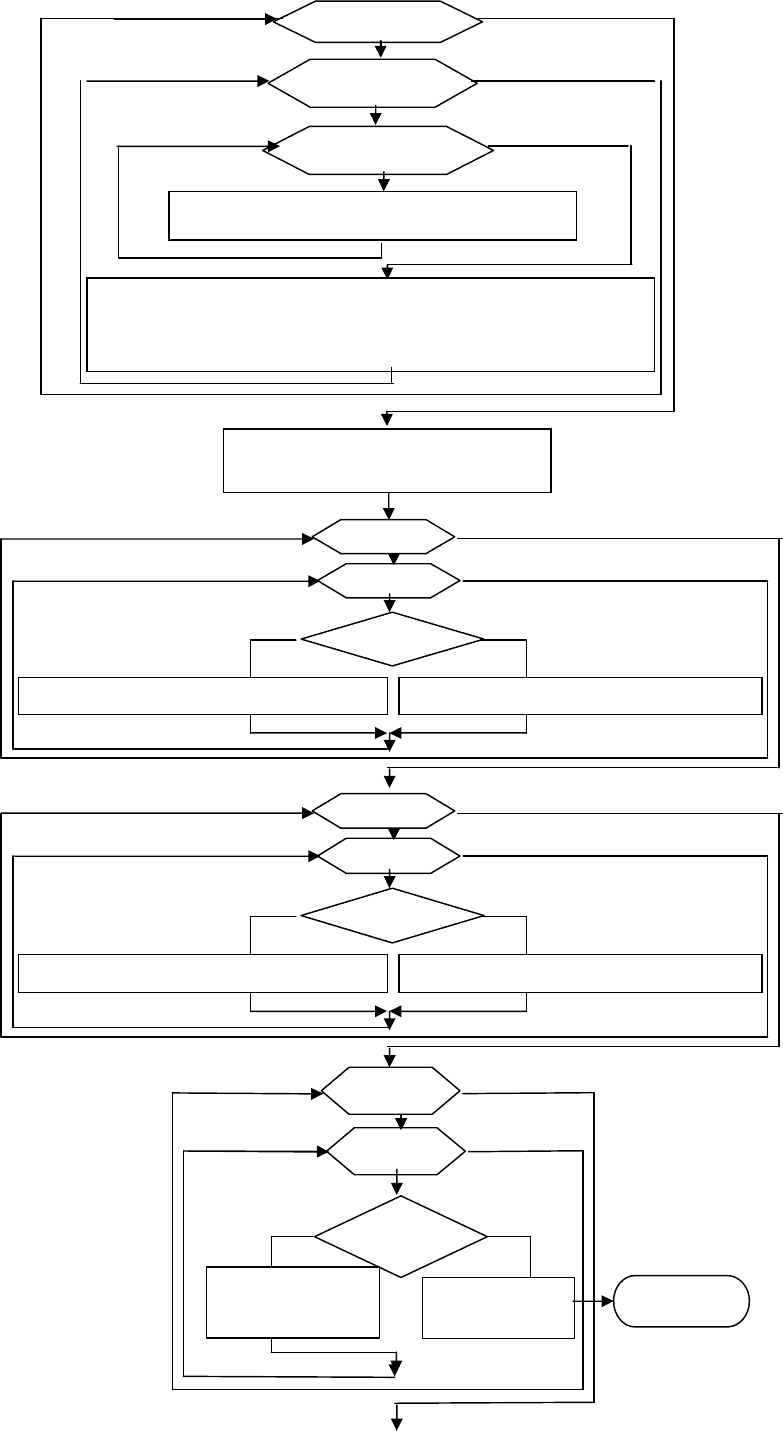
Процедура PROMTAKT
j:=1÷4
k:=1÷n
t
0
l
jk
:=0;
rl
jk
:=0;
i:=1÷4
j:=1÷4
k:=1÷n
h
i
jk
:=1
-
e
-
λ
ijk
;
t0l
jk
:=t0l
jk
+h
i
jk
*T
i
jk
;
rl
jk
:=rl
jk
+h
i
jk
;
j:=1÷4
k:=1÷n
rl
jk
<>0
да нет
t0l
jk
:=t0l
jk
/rl
jk
t0l
jk
:=0
c1
j
:=max2(t0l, j, n);
c1[1]>c1[3]
да нет
T01:=c1[1] T01:=c1[3];
c1[2]>c1[4]
да нет
T02:=c1[2] T02:=c1[4];
T0:=T01+T02;
Конец
Начало
Вывод
Т
0
Ввод
n
λ
i
jk
, T
i
jk
,
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
643
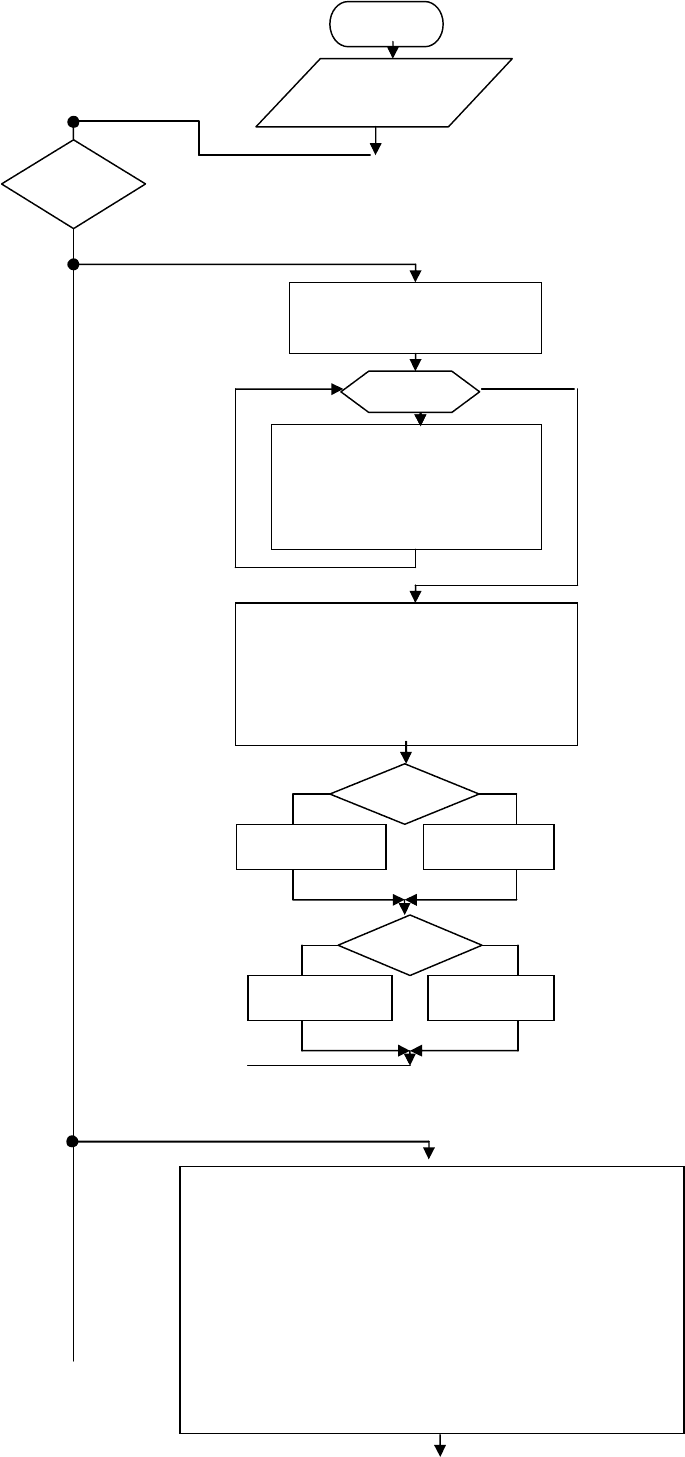
Процедура DINAM
n
(4)
(3)
c_1:=0;
c_2:=0;
c_3:=0; c_4:=0;
i:=1÷4
c_1:=c_1+ λ
i
11
τ
i
11
c_2:=c_2+ λ
i
31
τ
i
31
c_3:=c_3+ λ
i
21
τ
i
21
c_4:=c_4+ λ
i
41
τ
i
41
c
_1:=
c
_1+(λ
3
31
τ
3
31
+ λ
4
31
τ
4
31
);
c_2:=c_2+(λ
3
11
τ
3
11
+ λ
4
11
τ
4
11
);
c_3:=c_3+(λ
3
41
τ
3
41
+ λ
4
41
τ
4
41
);
c_4:=c_4+(λ
3
21
τ
3
21
+ λ
4
21
τ
4
21
);
c_1>c_2
да
нет
q:=c_1 q:=c_2
c_3>c_4
да нет
r:=c_3 r:=c_4
(2.26
6)
n=1:
c1[1]:=
λ
1
11
τ
1
11
+
λ
2
11
τ
2
11
+
λ
3
32
τ
3
32
+
λ
4
32
τ
4
32
;
c1[2]:= λ
1
12
τ
1
12
+ λ
3
12
τ
3
12
+ λ
3
32
τ
3
32
+ λ
4
32
τ
4
32
;
c1[3]:= λ
1
31
τ
1
31
+ λ
2
31
τ
2
31
+ λ
3
12
τ
3
12
+ λ
4
12
τ
4
12
;
c1[4]:= λ
1
32
τ
1
32
+ λ
3
32
τ
3
32
+ λ
3
12
τ
3
12
+ λ
4
12
τ
4
12
;
c2[1]:= λ
1
21
τ
1
21
+ λ
2
21
τ
2
21
+ λ
3
42
τ
3
42
+ λ
4
42
τ
4
42
;
c2[2]:= λ
1
22
τ
1
22
+ λ
3
22
τ
3
22
+ λ
3
42
τ
3
42
+ λ
4
42
τ
4
42
;
c2[3]:= λ
1
41
τ
1
41
+ λ
2
41
τ
2
41
+ λ
3
22
τ
3
22
+ λ
4
22
τ
4
22
;
c2[4]:= λ
1
42
τ
1
42
+ λ
3
42
τ
3
42
+ λ
3
22
τ
3
22
+ λ
4
22
τ
4
22
;
q:=c1[1]; r:=c2[1];
(5)
n=2:
Начало
Ввод
n
λ
i
jk
, τ
i
jk
(1)
(2)
644
i:=2÷4
q<c1[i]
q:=c1[i]
да
нет
r<c2[i]
r:=c2[i]
да
нет
(2.266)
(6)
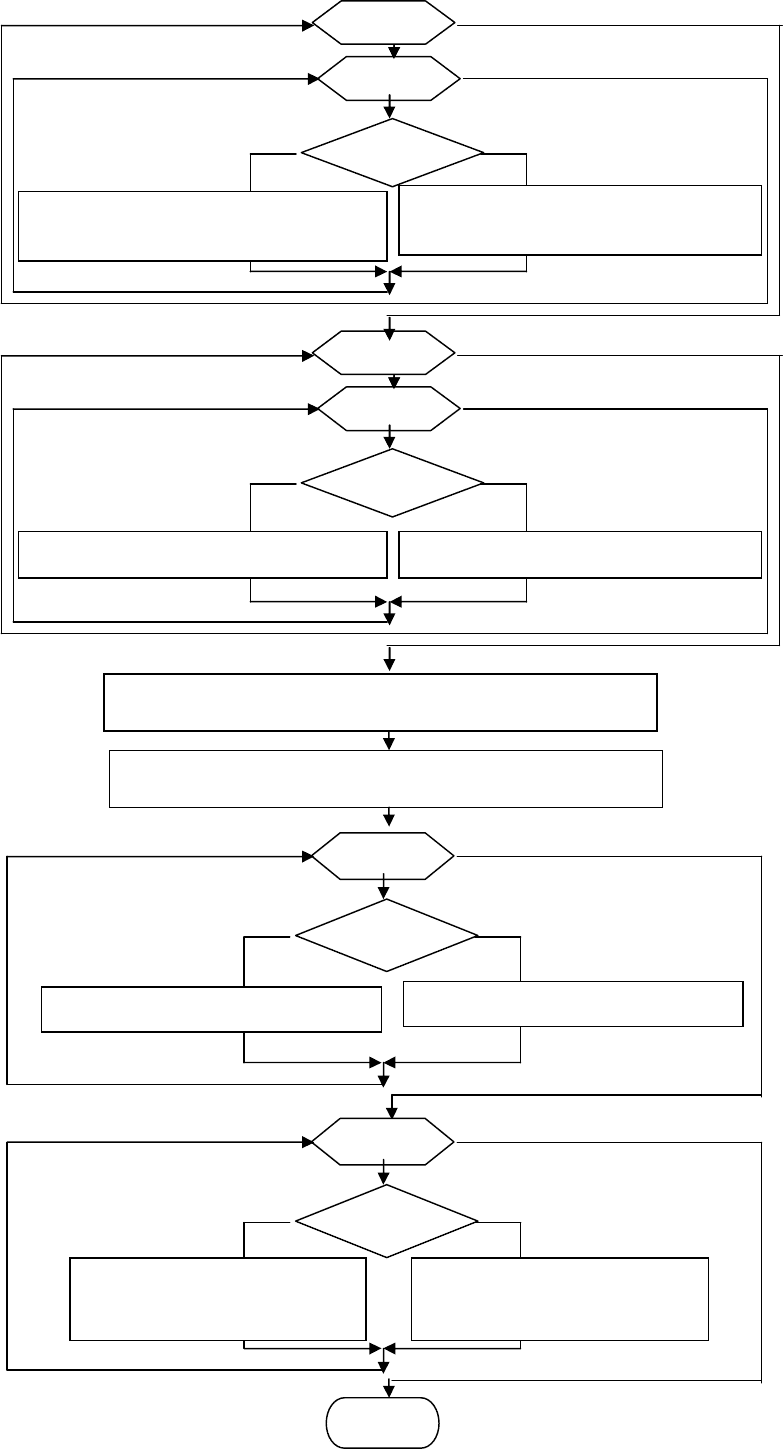
n=3:
c
1[1]:= λ
2
11
τ
2
11
;
c1[2]:= λ
1
12
τ
1
12
+ λ
3
33
τ
3
33
;
c1[3]:= λ
1
13
τ
1
13
+ λ
3
13
τ
3
13
+ λ
3
33
τ
3
33
+ λ
4
33
τ
4
33
;
c1[4]:= λ
2
31
τ
2
31
;
c1[5]:= λ
1
32
τ
1
32
+ λ
3
13
τ
3
13
;
c1[6]:= λ
1
33
τ
1
33
+ λ
3
33
τ
3
33
+ λ
3
13
τ
3
13
+ λ
4
13
τ
4
13
;
c2[1]:= λ
2
21
τ
2
21
;
c2[2]:= λ
1
22
τ
1
22
+ λ
3
43
τ
3
43
;
c2[3]:= λ
1
23
τ
1
23
+ λ
3
23
τ
3
23
+ λ
3
43
τ
3
43
+ λ
4
43
τ
4
43
;
c2[4]:= λ
2
41
τ
2
41
;
c2[5]:= λ
1
42
τ
1
42
+ λ
3
23
τ
3
23
;
c2[6]:= λ
1
43
τ
1
43
+ λ
3
43
τ
3
43
+ λ
3
23
τ
3
23
+ λ
4
23
τ
4
23
;
q:=c1[1]; r:=c2[1];
i:=2÷6
q<c1[i]
q:=c1[i]
да
нет
r<c2[i]
r:=c2[i]
да
нет
(2.266)
645
(7)
n=4:
c1[1]:= λ
2
11
τ
2
11
;
c1[2]:= λ
1
12
τ
1
12
+ λ
3
34
τ
3
34
+ λ
4
34
τ
4
34
;
c1[3]:= λ
1
13
τ
1
13
+ λ
3
34
τ
3
34
+ λ
4
34
τ
4
34
;
c1[4]:= λ
3
14
τ
3
14
+ λ
4
14
τ
4
14
;
c1[5]:= λ
2
31
τ
2
31
;
c1[6]:= λ
1
32
τ
1
32
+ λ
3
14
τ
3
14
+ λ
4
14
τ
4
14
;
c1[7]:= λ
1
33
τ
1
33
+ λ
3
14
τ
3
14
+ λ
4
14
τ
4
14
;
c1[8]:= λ
1
34
τ
1
34
+ λ
4
34
τ
4
34
;
c2[1]:= λ
2
21
τ
2
21
;
c2[2]:= λ
1
22
τ
1
22
+ λ
3
44
τ
3
44
+ λ
4
44
;
c2[3]:= λ
1
23
τ
1
23
+ λ
3
44
τ
3
44
+ λ
4
44
τ
4
44
;
c2[4]:= λ
3
24
τ
3
24
+ λ
4
24
τ
4
24
;
c2[5]:= λ
2
41
τ
2
41
;
c2[6]:= λ
1
42
τ
1
42
+ λ
3
24
τ
3
24
+ λ
4
24
τ
4
24
;
c2[7]:= λ
1
43
τ
1
43
+ λ
3
24
τ
3
24
+ λ
4
24
τ
4
24
;
c2[8]:= λ
3
44
τ
3
44
+ λ
4
44
τ
4
44
;
q:=c1[1]; r:=c2[1];
i:=2÷8
q<c1[i]
q:=c1[i]
да
нет
r<c2[i]
r:=c2[i]
да
нет
(10)
646

(9)
n=6:
(8)
n=5:
c
1[1]:= λ
2
11
τ
2
11
;
c1[2]:= λ
1
12
τ
1
12
+ λ
2
12
τ
2
12
;
c1[3]:= λ
1
13
τ
1
13
;
c1[4]:= λ
1
14
τ
1
14
;
c1[5]:= λ
1
15
τ
1
15
;
c1[6]:= λ
1
16
τ
1
16
;
c1[7]:= λ
2
31
τ
2
31
;
c1[8]:= λ
1
32
τ
1
32
+ λ
2
32
τ
2
32
;
c1[9]:= λ
1
33
τ
1
33
;
c1[10]:= λ
1
34
τ
1
34
;
c1[11]:= λ
1
35
τ
1
35
;
c1[12]:= λ
1
36
τ
1
36
;
c2[1]:= λ
2
21
τ
2
21
;
c2[2]:= λ
1
22
τ
1
22
+ λ
2
22
τ
2
22
;
c2[3]:= λ
1
23
τ
1
23
;
c2[4]:= λ
1
24
τ
1
24
;
c2[5]:= λ
1
25
τ
1
25
;
c2[11]:= λ
1
26
τ
1
26
;
c2[6]:= λ
2
41
τ
2
41
;
c2[7]:= λ
1
42
τ
1
42
+ λ
2
42
τ
2
42
;
c2[8]:= λ
1
43
τ
1
43
;
c2[9]:= λ
1
44
τ
1
44
;
c2[10]:= λ
1
45
τ
1
45
;
c2[12]:= λ
1
46
τ
1
46
;
q:=c1[1]; r:=c2[1];
c
1[1]:= λ
2
11
τ
2
11
;
c1[2]:= λ
1
12
τ
1
12
+ λ
2
12
τ
2
12
;
c1[3]:= λ
1
13
τ
1
13
;
c1[4]:= λ
1
14
τ
1
14
;
c1[5]:= λ
1
15
τ
1
15
;
c1[6]:= λ
2
31
τ
2
31
;
c1[7]:= λ
1
32
τ
1
32
+ λ
2
32
τ
2
32
;
c1[8]:= λ
1
33
τ
1
33
;
c1[9]:= λ
1
34
τ
1
34
;
c1[10]:= λ
1
35
τ
1
35
;
c2[1]:= λ
2
21
τ
2
21
;
c2[2]:= λ
1
22
τ
1
22
+ λ
2
22
τ
2
22
;
c2[3]:= λ
1
23
τ
1
23
;
c2[4]:= λ
1
24
τ
1
24
;
c2[5]:= λ
1
25
τ
1
25
;
c2[6]:= λ
2
41
τ
2
41
;
c2[7]:= λ
1
42
τ
1
42
+ λ
2
42
τ
2
42
;
c2[8]:= λ
1
43
τ
1
43
;
c2[9]:= λ
1
44
τ
1
44
;
c2[10]:= λ
1
45
τ
1
45
;
q:=c1[1]; r:=c2[1];
i:=2÷12
q<c1[i]
q:=c1[i]
да
нет
r<c2[i]
r:=c2[i]
да
нет
(10)
i:=2÷10
q<c1[i]
q:=c1[i]
да
нет
r<c2[i]
r:=c2[i]
да
нет
Подсчет
q
и
r
для
пяти и шести рядов
Конец
Вывод
q, r
(11)
(12)
647

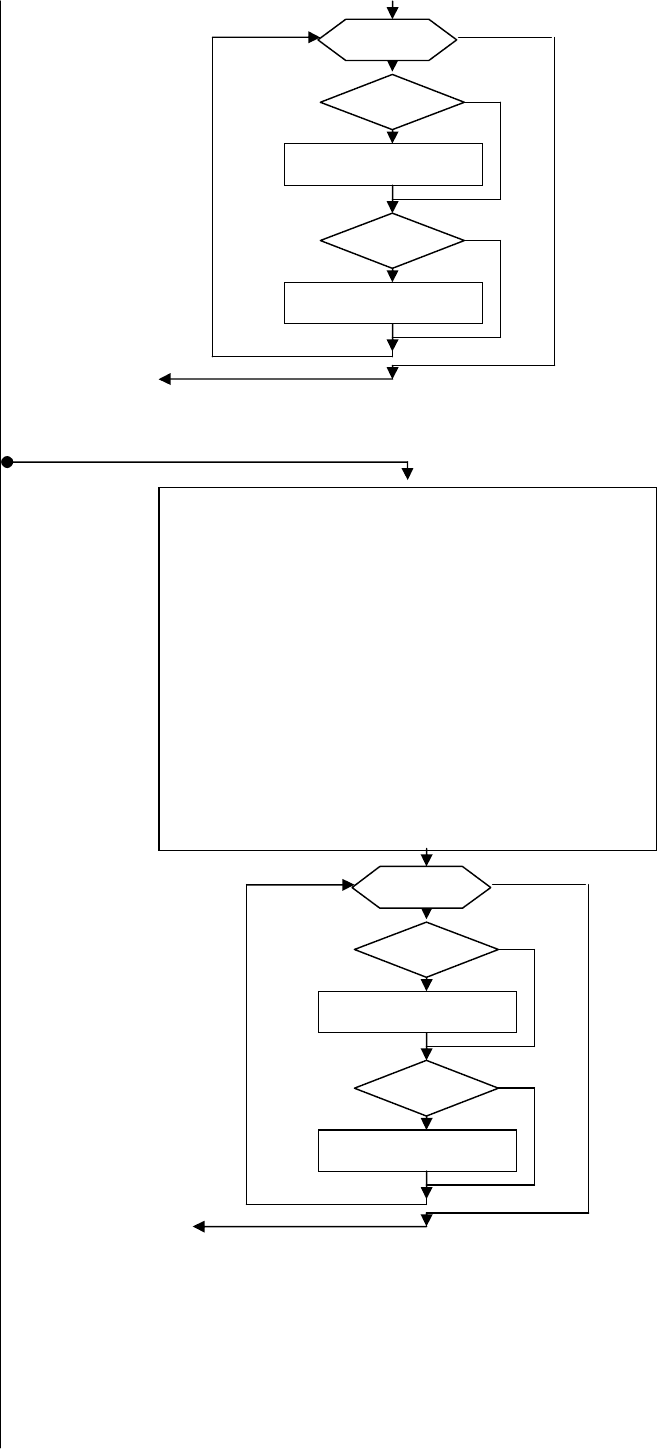
Процедура RASCHET
j:=1÷4
k:=1÷n
n
0j
:=n
0j
+ n
0jk
; n
0цh
:=n
0цh
+ n
0jk
да
j mod 2 <>0
нет
n
0jk
:=(
tr
+T
0
+β*(
С
-
T
0
))/(1
-
q
)*λ
jk
n
maxjk
:=(t
кр
+T
0
)*λ
jk
;n
maxj
:=n
maxj
+n
maxjk
n
0jk
:=(
tr
+T
0
+α*(
С
-
T
0
))/(1
-
r
)*λ
jk
n
maxjk
:=(t
зел
+T
0
)*λ
jk
;n
maxj
:=n
maxj
+n
maxjk
n
0h
:= n
0цh
*3600/С
Z
1TE1Пол
:=(
tr
+T
0
+β*(
С
-
T
0
))/2
+
l
/(v
2
-
v
1
);
Z
1TE2Пол
:=(tr+T
0
+α*(С-T
0
))/2+l/(v
2
-v
1
);
Z
цhПол
:=Z
цПол
/3600;
Z
hПол
:=Z
цПол
/C;
j:=1÷4
k:=1÷n
Z
цПол
:= Z
цПол
+ Z
jПол
да
j mod 2 <>0
нет
Z
jkПол
:= Z
1TE1Пол
*n
0jk
,
Z
jПол
:= Z
jПол
+ Z
jkПол
Z
jkПол
:= Z
1TE2Пол
*n
0jk
Z
jПол
:= Z
jПол
+ Z
jkПол
Начало
Ввод
C, T
0
, t
зел
, t
кр
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
j
=
4 4
1 1 1
1 3,4 1 3,4
/
i i i i i i
j j j j j j
i i i i
648
j:=1÷4
k:=1÷n
да
j mod 2 <>0
нет
t
0jk
:=((2*tr+T
0
+β*(С-T
0
))*q)/(1-q) t
0jk
:=((2*tr+T
0
+α*(С-T
0
))*r)/(1-r)
j:=1÷4
k:=1÷n
τ
jk
<>0
да нет
n
xjk
:=
t
xjk
/
τ
jk
n
xj
:= n
xj
+ n
xjk
ошибка
Конец
k:=1÷n
Z
jkЖив
:= Z
jkЖив
+ n
0jk
m:=1÷round(n
0jk
)
Z
jkЖив
:= (2*Z
jkЖив
–
(1+
r
ound(n
0jk
))*
r
ound(n
0jk
))/(2*λ
jk
)
Z
jЖив
:= Z
jЖив
+ Z
jkЖив
Z
1TEjЖив
:= Z
jЖив
/n
0j
; Z
цЖив
:= Z
цЖив
+ Z
jЖив
j:=1÷4
Z
цhЖив
:=Z
цЖив
/3600;
Z
hЖив
:=Z
цЖив
/C;
(9)
(10)
(11)
(12)
(13)
j:=1÷4
k:=1÷n
да
j mod 2 <>0
нет
t
xjk
:=t
зел
- t
0jk
t
xjk
:=t
кр
- t
0jk
649
(14)
(15)
(17)
(18)
(19)
j:=1÷4
k:=1÷n
да
j mod 2 <>0
нет
Н
jk
:= t
0jk
/ t
зел
Н
jk
:= t
0jk
/ t
кр
j:=1÷4
k:=1÷n
да
j mod 2 <>0
нет
λ
maxjk
:=(
t
зел
-
t
r
)/Cτ
jk
λ
maxj
:=(t
зел
-t
r
)/Cτ
j
λ
maxjk
:=(
t
кр
-
t
r
)/Cτ
jk
λ
maxj
:=(t
кр
-t
r
)/Cτ
j
Θ=(C-C*(q+r)-2*tr-T
0
)/(C-C*(q+r)-2*tr)*100%
k=(2*tr+T
0
)/(1-(q+r)T
0
)
j:=1÷4
да
j mod 2<>0
нет
φ
j
:=(n
0j
+n
xj
)/(α*(C-T
0
))
φ
j
:=(n
0j
+n
xj
)/(β*(C-T
0
))
j:=1÷4
да
j mod 2<>0
нет
I
т
:=C*λ
j
/
t
зел
Iв:=1/τ
j
; Iф:=(n
0j
+n
xj
)/ t
зел
I
т
:=C*λ
j
/
t
кр
Iв:=1/τ
j
; Iф:=(n
0j
+n
xj
)/ t
кр
Конец
(16)
(20)
650