Живоглядов В.Г. Теория движения транспортных и пешеходных потоков
Подождите немного. Документ загружается.

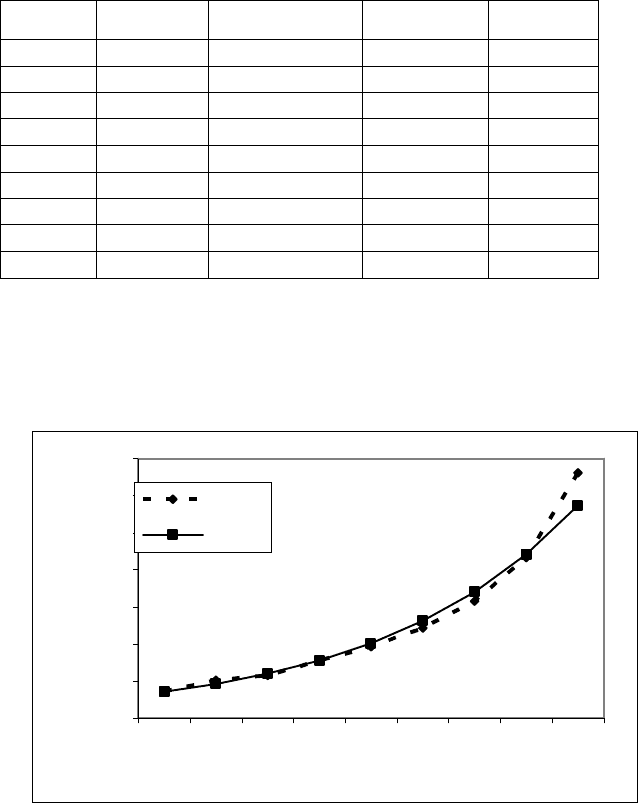
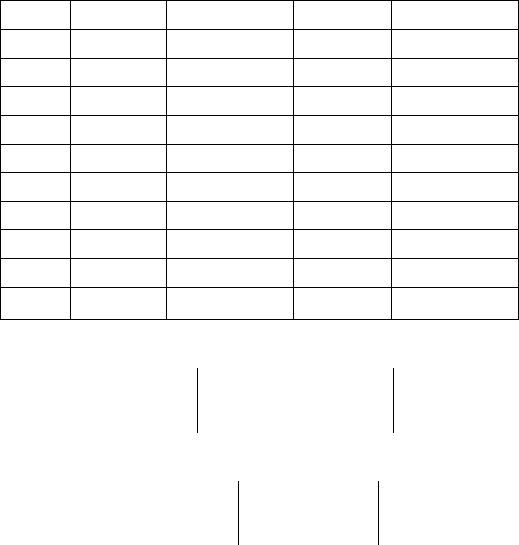
Таблица 2.20
Результаты отклонений табличных значений от значений, вычисленных по
эмпирической формуле y=0,1195058*215 660 061 038,4450000
x
.
x
i
y
i
y
i
выч
γ
i
%
0,13 3,593627 3,554503483 0,0391235 1,09
0,14 5,119961 4,614414903 0,5055461 9,87
0,15 5,775275 5,990379529 0,2151045 3,72
0,16 7,780795 7,776640734 0,0041543 0,05
0,17 9,598404 10,09554417 0,4971402 5,18
0,18 12,16726 13,10591752 0,9386575 7,71
0,19 15,76356 17,01394903 1,2503890 7,93
0,2 21,62913 22,08730991 0,4581799 2,12
0,21 33,08919 28,67348773 4,4157023 13,34
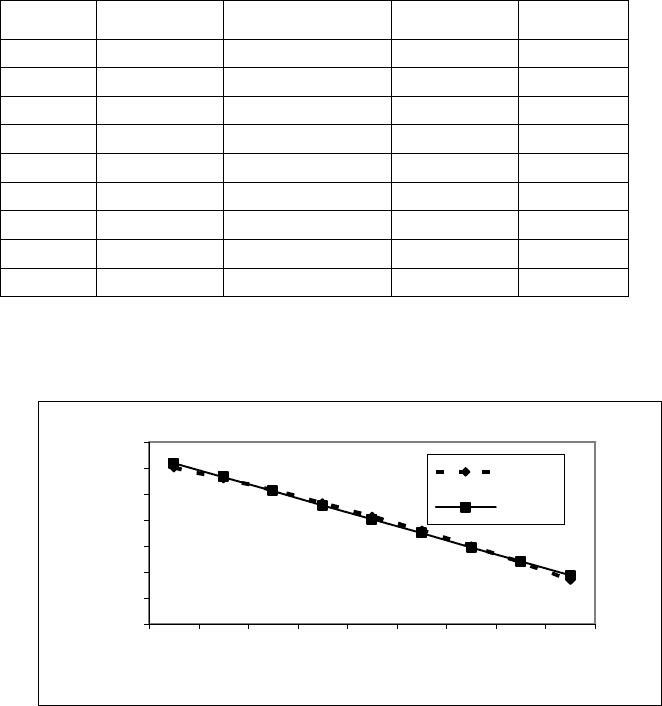
Результаты отклонений табличных значений от вычисленных по эмпи-
рической формуле y=0,1195058*215660061038,4450000 представлены на рис.
2.45.
0
5
10
15
20
25
30
35
0,13 0,14 0,15 0,16 0,17 0,18 0,19 0,2 0,21
Xi
Yi,Yiвыч
Yi
Yiвыч
Рис. 2.45. Результаты отклонений табличных значений от значений, вычисленных по эм-
пирической формулеy=0,1195058*215 660 061 038,4450000
x
Таким образом, размах отклонений значений табличных от вычислен-
ных 0,0041543÷4,4157023, среднее взвешенное отклонение составляет
0,0513,34 %, что дает основание подтвердить точность выбранной эмпири-
ческой кривой.
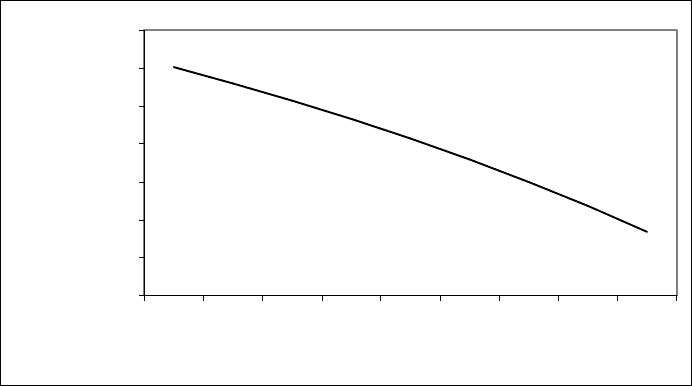
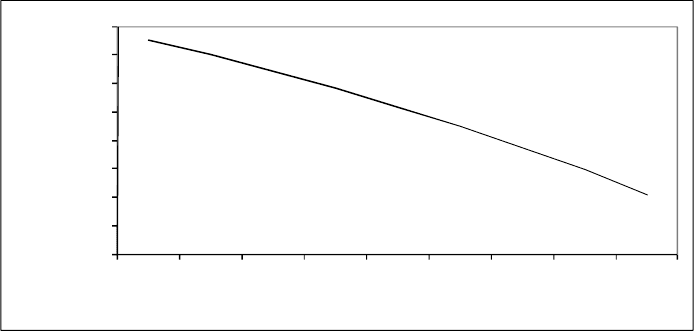
8. Изучение зависимости временного интервала, оставшегося после
пропуска полной очереди ТС от интенсивности движения (рис. 2.46). Для
правильного выбора вида аналитической зависимости выполняются проме-
жуточные вычисления.
На отрезке изменения переменной x, т.е. х
[0,13; 0,21] выберем точки
291
х
1
= 0,13 и х
n
= 0,21 наиболее удаленных друг от друга (крайние).
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,13 0,14 0,15 0,16 0,17 0,18 0,19 0,2 0,21
Интенсивность прибытия, ТЕ/с
Временной интервал, оставшийся
после пропуска полной очереди, с
Рис. 2.46. Зависимость временного интервала, оставшегося после пропуска полной
очереди транспортных средств от интенсивности движения
Вычисляем х
арм
, х
геом
, х
гарм
по формулам (2.265) и на графике геометри-
чески находим соответствующие значения переменной у. По данным табл.
2.3 находятся у
арм
, у
геом
, у
гарм
, при этом используюем формулы (2.266):
x
арм
=
0,17
y
арм
=
0,192631
y
*
1
=
0,207293
x
геом
=
0,165227
y
геом
=
0,158962
y
*
2
=
0,226138
x
гарм
=
0,160588
y
гарм
=
0,131178
y
*
3
=
0,236053
Сравнивая числовые значения у*
1
, у*
2
, у*
3
с у
арм
, у
геом
, у
гарм
и оцени-
вая погрешности проведенных вычислений по формулам (2.267)-(2.273) по-
лучены следующие результаты:
После этого выбирается минимальная погрешность ε из ε
i
, (i=1, 2,…7).
ε= min (ε
1
, ε
2
, ε
3
, ε
4
, ε
5
, ε
6
, ε
7
) =0,014662
Так как ε
совпадает с ε
1
, то в качестве аналитической зависимости хо-
рошим приближением служит зависимость у=ах+b, с неизвестными парамет-
рами а и b. Для уточнения этих параметров используется МНК. Согласно
ε
1
=|
y
*
1
-
y
арм
|=
0,014662
ε
2
=|
y
*
1
-
y
геом
|=
0,048331
ε
3
=|
y
*
1
-
y
гарм
|=
0,076115
ε
4
=|
y
*
2
-
y
арм
|=
0,033507
ε
5
=|
y
*
2
-
y
геом
|=
0,067175
ε
6
=|
y
*
3
-
y
арм
|=
0,043422
ε
7
=|
y
*
3
-
y
гарм
|=
0,104874
292
этого метода значения параметров функциональной зависимости а и b следу-
ет выбрать так, чтобы сумма квадратов погрешностей была наименьшей (см.
уравнение (2.274)), т.е. F(а, в) =
n
i
ii
baxfy
1
2
)),;((( будет минимальной, где ε
i
=
у
i
– f (x
i
; a, b) – i-я погрешность (i=1, 2,…7).
Необходимым условием существования минимума функции двух пе-
ременных является равенство нулю всех ее частных производных. Значения
параметров а и b найдем из системы уравнений (2.275). Система (2.275) при-
мет следующий вид:
n
i
i
n
i
i
n
i
ii
n
i
i
n
i
i
ynbxa
yxxbxa
11
111
2
)(
Далее находятся значения а и b, путем решения системы матричным ме-
тодом, предварительно осуществив расчеты, которые приведены в табл. 2.21
Таблица 2.21
Данные расчетов для МНК
i
x
i
y
i
(x
i
)
2
x
i
y
i
1
0,13
0,301432
0,0169
0,039186
2
0,14
0,280058
0,0196
0,039208
3
0,15
0,257334
0,0225
0,0386
4
0,16
0,233129
0,0256
0,037301
5
0,17
0,207293
0,0289
0,03524
6
0,18
0,179655
0,0324
0,032338
7
0,19
0,150021
0,0361
0,028504
8
0,2
0,118166
0,04
0,023633
9
0,21
0,08383
0,0441
0,017604
∑
1,53
1,810918
0,2661
0,291614
Итак, дана матрица коэффициентов при неизвестных вида:
L=
0,2661
1,53
1,53
9
а также матрица свободных членов
M=
0,2916142
1,810918
Используя X=L
-1
M, получим
Х=
-2,706973333
0,661398578
где a= -2,706973333, b= 0,661398578, отсюда эмпирическая зависимость
293
у=ах+b при найденных значениях a и b принимает вид:
y=-2,7069733*x+0,6613986.
Для определения точности выбора эмпирической прямой, т.е. макси-
мального отклонения табличных значений от аппроксимирующей прямой
y=-2,7069733*x+0,6613986, составим сравнительную табл. 2.22
Таблица 2.22
Результаты отклонений табличных значений от значений, вычисленных по
эмпирической формуле y=-2,7069733*x+0,6613986
x
i
y
i
y
i
выч
γ
i
%
0,13 0,301432 0,309492044 0,00806 2,67
0,14 0,280058 0,282422311 0,002364 0,84
0,15 0,257334 0,255352578 0,001981 0,77
0,16 0,233129 0,228282844 0,004846 2,08
0,17 0,207293 0,201213111 0,00608 2,93
0,18 0,179655 0,174143378 0,005512 3,07
0,19 0,150021 0,147073644 0,002947 1,96
0,2 0,118166 0,120003911 0,001838 1,56
0,21 0,08383 0,092934178 0,009104 10,86
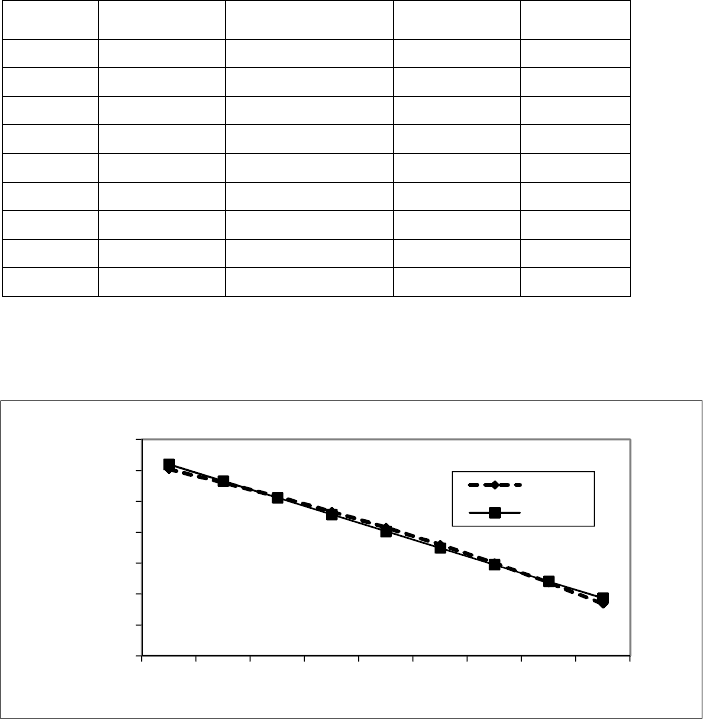
Результаты отклонений табличных значений от вычисленных по эмпи-
рической формуле представлены на рис. 2.47.
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,13 0,14 0,15 0,16 0,17 0,18 0,19 0,2 0,21
Yi,Yiвыч
Xi
Yi
Yiвыч
Рис. 2.47. Результаты отклонений табличных значений от значений, вычисленных
по эмпирической формуле y=-2,7069733*x+0,6613986
Таким образом, размах отклонений значений табличных от вычислен-
ных 0,001981÷0,009104, среднее взвешенное отклонение - 0,77÷10,86 %, что
дает основание подтвердить точность выбранной эмпирической прямой.
9. Изучение зависимости количества транспортных средств, прошед-
ших перекресток сходу от интенсивности движения (рис 2.48). Для пра-
вильного выбора вида аналитической зависимости выполняются промежу-
294
точные вычисления.
На отрезке изменения переменной x, т.е. х
[0,13; 0,21] выберем точки
х
1
= 0,13 и х
n
= 0,21 наиболее удаленных друг от друга (крайние).
0
0,02
0,04
0,06
0,08
0,1
0,12
0,14
0,16
0,13 0,14 0,15 0,16 0,17 0,18 0,19 0,2 0,21
Количество ТЕ, прошедших
перекреток сходу
Интенсивность прибытия, ТЕ/с
Рис. 2.48. Зависимость количества транспортных средств, прошедших перекресток
сходу от интенсивности движения
Вычисляем х
арм
, х
геом
, х
гарм
по формулам (2.265) и на графике геометри-
чески находим соответствующие значения переменной у. По данным табл.
2.3 находим у
арм
, у
геом
, у
гарм
, при этом используем формулы (2.266):
x
арм
=
0,17
y
арм
=
0,096316
y
*
1
=
0,103647
x
геом
=
0,165227
y
геом
=
0,079481
y
*
2
=
0,113069
x
гарм
=
0,160588
y
гарм
=
0,065589
y
*
3
=
0,118026
Сравнивая числовые значения у*
1
, у*
2
, у*
3
с у
арм
, у
геом
, у
гарм
и оцени-
вая погрешности проведенных вычислений по формулам (2.267)-(2.273), по-
лучим следующие результаты:
После этого выбирается минимальная погрешность ε из ε
i
, (i=1, 2,…7):
ε= min (ε
1
, ε
2
, ε
3
, ε
4
, ε
5
, ε
6
, ε
7
) =0,007332
Так как ε
совпадает с ε
1
, то в качестве аналитической зависимости хо-
рошим приближением служит зависимость у=ах+b, с неизвестными парамет-
ε
5
=|
y
*
2
-
y
геом
|=
0,033588
ε
6
=|
y
*
3
-
y
арм
|=
0,021711
ε
7
=|
y
*
3
-
y
гарм
|=
0,05243
7
ε
1
=|
y
*
1
-
y
арм
|=
0,007332
ε
2
=|
y
*
1
-
y
геом
|=
0,024166
ε
3
=|
y
*
1
-
y
гарм
|=
0,038058
ε
4
=|
y
*
2
-
y
арм
|=
0,016753
295
рами а и b. Для уточнения этих параметров используется МНК. Согласно
этого метода значения параметров функциональной зависимости а и b следу-
ет выбрать так, чтобы сумма квадратов погрешностей была наименьшей
(уравнение (2.273)), т.е. F(а, в) =
n
i
ii
baxfy
1
2
)),;((( будет минимальной, где ε
i
=
= у
i
– f (x
i
; a, b) – i-я погрешность (i=1, 2,…7).
Необходимым условием существования минимума функции двух пе-
ременных является равенство нулю всех ее частных производных. Значения
параметров а и b найдем из системы уравнений (2.275). Система (2.275) при-
мет следующий вид:
n
i
i
n
i
i
n
i
ii
n
i
i
n
i
i
ynbxa
yxxbxa
11
111
2
)(
Далее, находятся значения а и b, путем решения системы матричным ме-
тодом, предварительно осуществив расчеты, которые приведены в табл. 2.23
Таблица 2.23.
Данные расчетов для МНК
i
x
i
y
i
(x
i
)
2
x
i
y
i
1
0,13
0,150716
0,0169
0,019593
2
0,14
0,140029
0,0196
0,019604
3
0,15
0,128667
0,0225
0,0193
4
0,16
0,116565
0,0256
0,01865
5
0,17
0,103647
0,0289
0,01762
6
0,18
0,089828
0,0324
0,016169
7
0,19
0,075011
0,0361
0,014252
8
0,2
0,059083
0,04
0,011817
9
0,21
0,041915
0,0441
0,008802
∑
1,53
0,905459
0,2661
0,145807
Итак, дана матрица коэффициентов при неизвестных вида:
L=
0,2661
1,53
1,53
9
а также матрица свободных членов
M=
0,1458071
0,905459
Используя X=L
-1
M, получим
Х=
-1,353486667
0,330699289
296
где a= -1,353486667, b= 0,330699289, отсюда эмпирическая зависимость
у=ах+b при найденных значениях a и b принимает вид
y=-1,3534867*x+0,3306993.
Для определения точности выбора эмпирической прямой, т.е. макси-
мального отклонения табличных значений от аппроксимирующей прямой
y=-1,3534867*x+0,3306993 составим сравнительную табл. 2.24
Таблица 2.24
Результаты отклонений табличных значений от значений, вычисленных по эмпи-
рической формуле y=-1,3534867*x+0,3306993
x
i
y
i
y
i
выч
γ
i
%
0,13 0,150716 0,154746022 0,00403 2,67
0,14 0,140029 0,141211156 0,001182 0,84
0,15 0,128667 0,127676289 0,000991 0,77
0,16 0,116565 0,114141422 0,002423 2,08
0,17 0,103647 0,100606556 0,00304 2,93
0,18 0,089828 0,087071689 0,002756 3,07
0,19 0,075011 0,073536822 0,001474 1,96
0,2 0,059083 0,060001956 0,000919 1,56
0,21 0,041915 0,046467089 0,004552 10,86
Результаты отклонений табличных значений от вычисленных по эмпи-
рической формуле представлены на рис. 2.49.
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,13 0,14 0,15 0,16 0,17 0,18 0,19 0,2 0,21
Xi
Yi,Yiвыч
Yi
Yiвыч
Рис. 2.49. Результаты отклонений табличных значений от значений, вычисленных
по эмпирической формуле y=-1,3534867*x+0,3306993
Таким образом, размах отклонений значений табличных от вычислен-
ных 0,000991÷0,004552, среднее взвешенное отклонение составляет 0,77
÷10,86 %, что дает основание подтвердить точность выбранной эмпириче-
ской прямой.
Результаты исследования зависимостей основных характеристик рабо-
297
ты СО от интенсивности прибытия ТС к стоп – линии представлены в табл.
2.25
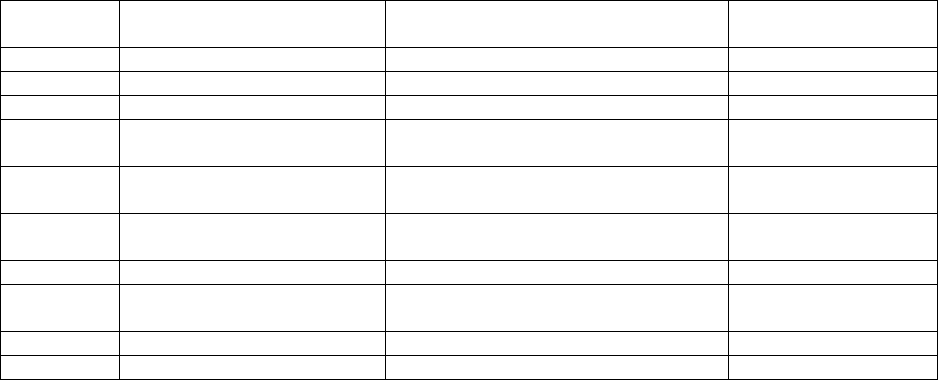
Таблица 2.25
Зависимость основных характеристик работы регулируемого перекрестка от интен-
сивности прибытия транспортных средств к его стоп-линии
Характер
и-
стика
Вид завис
и
мости
Уравнение зависим
о
сти
Погре
ш
ность
,
%
Т
0
дробно
-
раци
о
нальная
у
=1/(0,0009114
58
*х
+ 0,181822624)
0,00
q, r
линейная
у
= 2,125
*х
+ 0,008
0,00
C
дробно
-
раци
о
нальная
у
=1/(
-
0,65416051
*х
+ 0,151467216)
0,00 ÷ 0,03
t
зел
дробно
-
рациональная фун
к-
ция специального вида
у
=
х/
(
-
0,257754087
*х
+0,06108359)
0,02
7,78
n
0
дробно
-
рациональная фун
к-
ция специального вида
y
=
x
/(
-
0,6541433*
x
+0,1514632)
0,00
0,02
t
0
дробно
-
рациональная фун
к-
ция специального вида
y
=
x
/
(
-
0,2815935*
x
+0,0657394)
0,03
2,64
λ
max
линейная
у
=1,0625
*х
+ 0,004
0,00
Z
1TE
показ
а
тельная
y
=0,1195058*
*215 660 061 038,4450000
x
0,05
13,34
t
x
линейная
y
=
-
2,7069733*
x
+0,6613986
0,77÷10,86
n
x
линейная
y
=
-
1,3534867*
x
+0,3306993
0,77÷10,86
Наличие данной теоретической базы позволит находить механизмы, с
помощью которых можно не только оценивать, но и упреждать заторовые со-
стояния в дорожном движении. По нашему мнению, один из основных меха-
низмов упреждения заторов – это не допускать транспортную загрузку, пре-
вышающую потенциалы как проезжих частей, включая перекрестки (регули-
руемые, нерегулируемые), так и дорожных сетей в целом.
Целесообразность применения дополнительной информации, способ-
ствующей обеспечении ритмичного и безопасного пропуска транспортных
потоков доказана на практике в течении последних 30 лет не только в Крас-
нодаре [68,69,74], но и в других городах РФ и СНГ.
Не менее важны оценки характеристик нерегулируемых перекрестков.
С этой целью теоретические разработки выполнены для нерулируемых (рав-
нозначных и неравнозначных) перекрестков [70,72], которые представлены в
главе 3.
В теоретических разработках, оценках главы 2 учитывается взаимодей-
ствие ТПП (маневрирование ТС, повороты и движение в прямом направле-
нии), их задержки при этом у стоп-линии и на самом перекрестке, его гео-
298
метрические параметры, квалификация и скорость реакции водительского
состава, разнородность и распределение потоков. Представлена методика
учета и оценки пропуска ТП под прикрытием. Вместе с этим следует отме-
тить, что все это должно присутствовать в снятиях при натурных наблюдени-
ях характеристик ТПП (
jлjп
i
jkrjk
i
jk
i
jk
t
,,,,, ), геометрических параметров пе-
рекрестка и динамических факторов ТС и в подвижности как ПП, так и ТС,
(
i
j
i
j
SТ , ), отражающих сложившуюся практику дорожного движения обрабо-
танных до сравнительного уровня. Такой подход построения реальных мате-
матических моделей динамики ТПП в границах перекрестка позволит пра-
вильно и всесторонне оценить состояние ОД и обеспечить пропуск и управ-
ление этими потоками в оптимальном аспекте.
Учет геометрических параметров перекрестка, динамики и состава ТП,
а также интервала времени, необходимого ТС для освобождения перекрестка
после включения зеленого сигнала, а пешеходам – для завершения перехода,
если они не успели это сделать при разрешающем такте позволяет путем рас-
чета по предлагаемым методам определять рациональную длительность про-
межуточного такта (желтого сигнала), отражающую реальную динамику до-
рожного движения в каждой фазе, такте цикла СР.
Размеры промежуточных тактов, включающие длительность желтых
сигналов, отражающие условия движения на перекрестке, интенсивность
прибытия и временные интервалы между передними бамперами ТС, с учетом
реакции очереди ТС в основном ее автолидера на разрешающий движение
такт и взаимодействие потоков становится основой расчета наиболее выгод-
ной (оптимальной) длительности цикла светофора, его тактов и фаз. При
этом учитывается так же реакция первых рядов пешеходов.
В главе 2 также подробно представлена методология применения све-
тофоров с дополнительными секциями с вариантными проработками и мате-
матическим описанием схем пропуска и управления ТПП; показана логика
построения динамики образования и рассасывания очередей ТС, представле-
ны методы их расчета и оценки; рассматриваются принципы и теория обра-
299
зования рассасывания и упреждения заторовых состояний в дорожном дви-
жении.
Изложены принципы, оценки и методология использования пропуск-
ной способности (потенциала) проезжих частей, перекрестков, магистралей и
УДС в аспекте эффективности.
Логичность построения методологий, адекватно отражающих процес-
сы, связанные с пропуском ТПП и их составляющих, дает основание пола-
гать, что каждой длительности промежуточного такта, включая желтый сиг-
нал, рассчитанной на базе геометрических параметров перекрестка, каждой
интенсивности прибытия ТП к стоп-линии с учетом их динамики и состава, а
также квалификации водителей соответствует только одна рациональная
длительность цикла светофора. Изменение хотя бы одной из перечисленных
выше переменных исходных величин отражается на расчетной величине дли-
тельности цикла СР и его тактов.
Полученные методы, математические зависимости в этой главе позво-
ляют при изменении параметров перекрестка и характеристик ТПП найти
наиболее рациональные схемы и способы пропуска ТПП, а также режимы СР
с минимальными издержками.
Представлена обобщенная на разработках автора теория пропуска
транспортных и пешеходных потоков на регулируемых перекрестках, приме-
нение которой позволит более рационально эксплуатировать регулируемые
пересечения и снизить транспортные издержки; построена не только теоре-
тическая база и механизм задержек, но и методика расчета этих задержек на
конкретном примере и в доступной форме.
Результаты теоретических и экспериментальных исследований под-
твердились с минимальными погрешностями. В исследованиях применено
аппроксимированное моделирование.
300