Zelditch M.L. (и др.) Geometric Morphometrics for Biologists: a primer
Подождите немного. Документ загружается.


chap-04 4/6/2004 17: 22 page 98
98 GEOMETRIC MORPHOMETRICS FOR BIOLOGISTS
We can take this example a step further by specifying that all the chairs are located along
walls of the room, with every chair touching the wall. Now, the X- and Y-coordinates
can be replaced by the distance (L) around the perimeter of the room from the door to the
notebook, and the direction of the measurement (clockwise or counter-clockwise). If we
agree that distances around a perimeter are always measured in the same direction, then the
value of L is sufficient to describe the location of the notebook. The additional constraints
(chairs against the wall, perimeter measured in clockwise direction) have reduced the
degrees of freedom from two (X and Y) to one (L). We have not actually eliminated
either X or Y; rather, we have merely replaced that pair by L. Nor have we lost any
information; given L, and the direction in which L is measured, as well as the height of
the chairs, we can reconstruct the original three Cartesian coordinates (X, Y, and Z)of
the notebook.
In the case of two-dimensional shapes, we start out with K landmarks in two dimensions,
so we have 2K coordinates, which constitute 2K independent measurements (because each
coordinate is independent of the others, in principle). In the course of superimposing the
shapes on the reference form, we perform three operations: (1) we center the matrix on the
centroid, thereby losing two degrees of freedom; (2) we set centroid size to one, thereby
losing another; and (3) we compute the angle through which to rotate the specimen, thereby
losing one more. By the end, we have lost four degrees of freedom as a consequence of
applying these constraints to the data. However, unlike the notebook example, we still
have 2K variable coordinates in our data matrix; none of them have been removed or
constrained. We have not lost degrees of freedom by removing coordinates, because the
loss of degrees of freedom is shared by all coordinates – each coordinate has lost some
fraction of a degree of freedom because each is partially constrained by the operations of
centering, scaling and rotation. Consequently, we have too many variable coordinates for
the degrees of freedom. The primary advantage of the thin-plate spline methods (discussed
in Chapter 6) is that we can work with 2K −4 variables, so that the number of variables
and the number of degrees of freedom are the same.
Summary
Because there are several different morphometric spaces and distances, some with only
slightly different names, we summarize them below.
The configuration space is the set of all matrices representing landmark configurations
that have the same number of landmarks and coordinates. This space has K ×M
dimensions, where K is the number of landmarks and M is the number of coordinates.
The pre-shape space is the set of all K ×M configurations with a centroid size of one,
centered at the origin. This space is the surface of a hypersphere of radius one. Because of
the centering, configurations that differ only in position are represented as the same point in
pre-shape space. Similarly, because of the scaling, configurations that differ only in centroid
size are represented by the same point in pre-shape space. Consequently, this space has
KM –(M +1) dimensions; M dimensions are lost due to centering, and one dimension is
lost due to scaling. In pre-shape space, the set of all configurations that may be converted
into one another by rotation lies along a circular arc called a fiber, which lies on the surface
of the pre-shape hypersphere. The distance between shapes in pre-shape space is the length
of the shortest arc across the surface connecting the fibers representing those shapes, and
chap-04 4/6/2004 17: 22 page 99
THEORY OF SHAPE 99
is called the Procrustes distance. Because the radius of the pre-shape hypersphere is one,
the length of the arc is also the value (in radians) of the angle subtended (ρ).
To construct a shape space, we select one point on each fiber, removing differences in
rotation. The number of axes on which a configuration can be rotated is a function of the
number of landmark coordinates: M(M −1)/2. This also specifies the number of dimen-
sions that are lost in the transition from pre-shape space to shape space (1 if M =2, 3 if
M =3). The construction of a shape space begins with the selection of one shape in a conve-
nient orientation to serve as the reference configuration. Every other shape (called a target
configuration) is placed in the orientation that corresponds to the location on its fiber that
is closest to the reference. This orientation is the position that minimizes the square root of
the sum of the squared differences between the coordinates of corresponding landmarks.
When minimized simply by rotation, this quantity is called the partial Procrustes distance.
Configurations that satisfy this condition are said to be in partial Procrustes superimposi-
tion on the reference. The partial Procrustes distance is the length of the chord of the arc
between the fibers in pre-shape space.
After rotation to partial Procrustes superimposition, the square root of the sum of the
squared differences between the coordinates of corresponding landmarks can be further
reduced by rescaling the target to centroid size of cos(ρ). Configurations that satisfy this
condition are said to be in full Procrustes superimposition on the reference; and the result-
ing distance between shapes (square root of the sum of the squared differences between the
coordinates of corresponding landmarks) is the full Procrustes distance. The set of shapes
in full Procrustes superimposition comprises a hypersphere of radius one-half, inside the
hypersphere of shapes in partial Procrustes superimposition, and tangent to the larger
hypersphere at the reference. This smaller, inner hypersphere is Kendall’s shape space.
Problems and exercises on the theory of shape
To get a feel for what the software will be doing for you, do these problems and exercises
using pencil, paper and a scientific calculator. The numbers of landmarks are small, to
keep the level of tedium to a minimum!
1. Suppose that the configuration matrix for a given shape is:
A =
0.0 −1.0
0.00.5
0.7 −0.2
a. How many landmarks are there in this configuration? How many dimensions does
it have?
b. Sketch the shape representing this configuration (you may want to use graph paper,
if it helps). Number the landmarks.
c. Write out the row vector form of this landmark configuration.
d. Find the centroid position of this landmark configuration. How many coordinates
are in the centroid position? Sketch the location of the centroid on your picture
from (b) above.

chap-04 4/6/2004 17: 22 page 100
100 GEOMETRIC MORPHOMETRICS FOR BIOLOGISTS
e. Write out the centered form of this configuration matrix, by subtracting the value
of the X-coordinate of the centroid from each of the values in the first column,
and subtracting the value of the Y-coordinate of the centroid from each of the
values in the second column.
f. Find the centroid size of this landmark configuration.
g. Now form the pre-shape configuration for A. Do this by dividing the centered form
of this matrix (solution to (e) above) by the centroid size (solution to (f) above).
Remember that when you divide a matrix by a scalar (an ordinary number, like
centroid size), you must divide each value in the matrix by the scalar divisor (which
is centroid size in this case).
2. Suppose a configuration of dimensional landmarks is given by:
B ={0.3, −1.0, 0.25, −0.4, 0.0, 0.75, −0.2, 0.35}
a. How many landmarks are in this configuration?
b. Write out the configuration matrix for this configuration.
c. Find the centroid for this configuration.
d. Find the centroid size for this configuration.
3. Given the landmark configuration:
C ={0.1, 0.1, 0.1, 0.3, −1.0, 1.1, −0.6, −0.3, 0.2, 0.3, −0.1, 0.15}
can you determine what K and M are?
4. Suppose we have the configuration matrix:
X =
0.50.5
−0.20.3
0.10.3
a. Compute a configuration matrix that would represent X in pre-shape space.
b. Now, for the truly stout of heart, suppose we have a second configuration matrix
in pre-shape space:
Y =
0.6864 0.1961
−0.6864 −0.0981
0.0 −0.0981
Determine the angle that you would have to rotate the pre-shape space matrix
form of X (from (a) above) to produce a partial Procrustes superposition of X on
the reference form Y.
5. Given two matrices:
X =
0.7146 0.2150
−0.6438 −0.0913
−0.0709 −0.1237
Y =
0.6864 0.1961
−0.6864 −0.0981
0.0 −0.0981
chap-04 4/6/2004 17: 22 page 101
THEORY OF SHAPE 101
where X is in partial Procrustes superposition with Y:
a. Find the partial Procrustes distance between the two.
b. Use the partial Procrustes distance to find the Procrustes distance between the two.
c. Use the Procrustes distance to calculate the full Procrustes distance between
the two.
Answers to problems and exercises
(A full solution is given if the calculation has not been seen before.)
1. Looking at the configuration matrix:
a. There are three landmarks (K =3 rows) and each is in two dimensions (M =2
columns).
b. See Figure 4.19.
c. In row form, A ={0.0, −1.0, 0.0, 0.5, 0.7, −0.2}.
d. The centroid is located at (0.2333, −0.2333), or X =0.2333, Y =−0.233.
The centroid position is calculated:
X
C
=
(0 +0 +0.7)
3
= 0.2333
Y
C
=
(−1 +0.5 −0.2)
3
=−0.2333
Figure 4.20 shows the location of the centroid.
1
(
0, ⫺1
)
2
(0, 0.5)
3
(0.7, ⫺0.2)
Figure 4.19 Answer to Exercise 4.1b.
chap-04 4/6/2004 17: 22 page 102
102 GEOMETRIC MORPHOMETRICS FOR BIOLOGISTS
1
(0, ⫺1)
2
(0, 0.5)
3
(0.7, ⫺0.2)
Figure 4.20 Answer to Exercise 4.1d.
e. We simply subtract the X-coordinate of the centroid (0.2333) from the first column
of A, and subtract the Y-coordinate of the centroid (−0.2333) from the second
column. This leaves us with:
−0.2333 −0.7667
−0.2333 0.7333
0.4667 0.0333
Note that if you add up the values in the first column you get zero, which is also
true for the second column. Thus the centroid position of the centered matrix is
(0, 0).
f. The centroid size is 1.2055. The centroid size is the square root of the summed
squared distances of the landmarks from the centroid, which is:
CS ={(0 −0.2333)
2
+(−1 −(−0.2333))
2
+(0 −0.2333)
2
+(0.5 −(−0.2333))
2
+(0.7 −0.2333)
2
+(−0.2 −(−0.2333))
2
}
½
= 1.2055
An easier approach is to use the centered form of the configuration matrix (with
the centroid set to zero). With this form, we can take the square root of the summed

chap-04 4/6/2004 17: 22 page 103
THEORY OF SHAPE 103
squared coordinates of the landmarks:
CS ={(−0.2333)
2
+(−0.7667)
2
+(−0.2333)
2
+ (0.7333)
2
+(0.4667)
2
+(0.0333)
2
}
½
= 1.2055
g. The resulting pre-shape space configuration is
A
pre-shape
=
−0.1936 −0.0630
−0.1936 0.6083
0.3871 0.0277
Note that the entries are identical to the centered matrix values (see (e) above)
divided by 1.2055.
2. Looking at the configuration:
a. There are four landmarks.
b. The configuration matrix is:
0.3 −1.0
0.25 −0.4
0.00.75
−0.20.35
c. The centroid is located at X
C
=0.0875, Y
C
=−0.075.
d. The centroid size CS =1.4087.
3. No! This might be K =6 and M =2 (a two-dimensional system), or K =4, M =3(a
three-dimensional system). If the data are in a row format, you cannot tell the value
of K or M from looking at it.
4. Looking at the configuration matrix:
a. The pre-shape space form of X is
0.7013 0.2550
−0.6376 −0.1275
−0.0638 −0.1275
b. The triangles can be iteratively rotated, or Equation 4.13 can be used:
θ = arctangent
K
j=1
Y
Rj
X
Tj
−X
Rj
Y
Tj
K
j=1
X
Rj
X
Tj
+Y
Rj
Y
Tj
(4.13)

chap-04 4/6/2004 17: 22 page 104
104 GEOMETRIC MORPHOMETRICS FOR BIOLOGISTS
Substituting the appropriate values of X and Y for the reference (R) and target
(T) yields:
θ = tan
−1
{(0.1961 ×0.7013 +(−0.0981) × (−0.6376) +(−0.0981)
× (−0.0638) + (−0.6864) × 0.2550 +(−0.6864) × (−0.1275)
+ 0 × (−0.1275))/(0.6864 × 0.7013 +(−0.6864) × (−0.6376)
+ 0 × (0.0638) + 0.1961 × 0.2550 + (−0.0981) × (−0.1275)
+ (−0.0981) × (−0.1275))}
θ =−0.0562 radians =−3.2175
◦
5. Looking at the matrices:
a. To find the partial Procrustes distance between the two, we take the square root
of the summed squared differences in the landmark coordinates:
D
p
={(0.7146 −0.6864)
2
+(0.2150 −0.1962)
2
+ (−0.6438 −(−0.6864))
2
+(−0.0913 −(−0.0981))
2
+ (−0.0709 −0)
2
+(−0.1237 −(−0.0981))
2
}
½
=0.0933
b. Because ρ =2 arcsin(D
p
), ρ =2 arcsin(0.0933/2) =0.0933 radians; the two are
equal through three decimal places.
c. D
F
= sin(ρ), so D
F
=sin(0.0933) =0.0932.
References
Bookstein, F. L. (1996). Combining the tools of geometric morphometrics. In Advances in
Morphometrics (L. F. Marcus, M. Corti, A. Loy et al., eds) pp. 131–151. Plenum Press.
Dryden, I. L. and Mardia, K. V. (1998). Statistical Shape Analysis. John Wiley & Sons.
Fink, W. L. and Zelditch, M. L. (1995). Phylogenetic analysis of ontogenetic shape transformations:
a reassessment of the piranha genus Pygocentrus (Teleostei). Systematic Biology, 44, 343–360.
Kendall, D. (1977). The diffusion of shape. Advances in Applied Probability, 9, 428–430.
Marcus, L. F., Hingst-Zaher, E. and Zaher, H. (2000). Applications of landmark morphometrics to
skulls representing the orders of living mammals. Hystrix (n.s.), 11, 24–48.
Rohlf, F. J. (1998). On applications of geometric morphometrics to studies of ontogeny and
phylogeny. Systematic Biology, 47, 147–158.
Rohlf, F. J. (2000). On the use of shape spaces to compare morphometric methods. Hystrix (n.s.),
11, 8–24.
Slice, D. E. (2001). Landmark coordinates aligned by Procrustes analysis do not lie in Kendall’s
shape space. Systematic Biology, 50, 141–149.
Small, C. G. (1996). The Statistical Theory of Shape. Springer.
Zelditch, M. L., Bookstein, F. L. and Lundrigan, B. L. (1992). Ontogeny of integrated skull growth
in the cotton rat Sigmodon fulviventer. Evolution, 46, 1164–1180.
Zelditch, M. L., Fink, W. L., Swiderski, D. L. and Lundrigan, B. L. (1998). On applications of
geometric morphometrics to studies of ontogeny and phylogeny: a reply to Rohlf. Systematic
Biology, 47, 159–167.
chap-05 4/6/2004 17: 23 page 105
5
Superimposition methods
In Chapter 3 we presented a simple method for obtaining shape variables: the two-point
registration that produces Bookstein’s shape coordinates. We began with this method
because it is especially easy to understand, even without knowing any of the theory devel-
oped in Chapter 4. Having covered that theory, we now can develop a more general
approach to the problem of matching up shapes prior to comparison. This matching is
termed “superimposition” because the landmark configurations are placed on top of each
other (by the mathematical operations that do not alter shape, i.e. translation, scaling, and
rotation). Several superimposition methods are available; they differ in how these opera-
tions are applied. The objective of this chapter is to explain some of these superimposition
methods, compare them, and discuss their relative advantages and disadvantages. We also
discuss in some detail the issue of interpreting the pictures of superimposed landmarks. At
first sight different methods may appear to suggest different interpretations of the shape
differences, but to a large extent the differences are illusory – the pictures might look
different, but they have the same meaning.
Before discussing the alternative methods of superimposition, we first explain why we
would even want an alternative to Bookstein’s shape coordinates (BC). We then describe
a superimposition method that is based on a very similar approach. This method, called
sliding baseline registration (SBR), also involves a two-point registration, but the two
points are not entirely fixed (they are allowed to “slide” along one axis). Next, we present
the most widely used method, Procrustes generalized least squares (GLS), followed by
an alternative that is similar to it in some respects (variously called Procrustes resistant
fit, or resistant fit theta-rho analysis, RFTRA). After presenting all of these methods, we
summarize their similarities and differences, discuss the interpretation of their graphical
results, and conclude with recommendations regarding their uses.
Why we want an alternative to Bookstein shape coordinates
Recall that Bookstein’s shape coordinates (BC) are obtained by the two-point registration
method (Chapter 3). This procedure fixes the coordinates of two points at (0, 0) and (1, 0);
Geometric Morphometrics for Biologists Copyright © 2004 Elsevier Ltd
ISBN 0–12–77846–08 All rights of reproduction in any form reserved
chap-05 4/6/2004 17: 23 page 106
106 GEOMETRIC MORPHOMETRICS FOR BIOLOGISTS
thus the segment bounded by these landmarks (the baseline) has a standard orientation
and length in all specimens, and the coordinates of all the other landmarks indicate their
positions relative to the baseline. Fixing the baseline coordinates is the source of the prin-
cipal advantages of this superimposition method, and also of the main disadvantages. The
severity of the disadvantages may persuade you to use one of the other methods, even if
the purposes of those methods seem a bit obscure at first.
The most notable advantages of BC arise from standardizing the coordinates of the
baseline. Because four coordinates are fixed (X- and Y-coordinates of the two baseline
points), the number of variable coordinates is 2K −4 (where K is the number of landmarks).
Consequently, the number of variable coordinates is exactly the same as the number of
dimensions of the shape space they occupy, which is also the number of statistical degrees
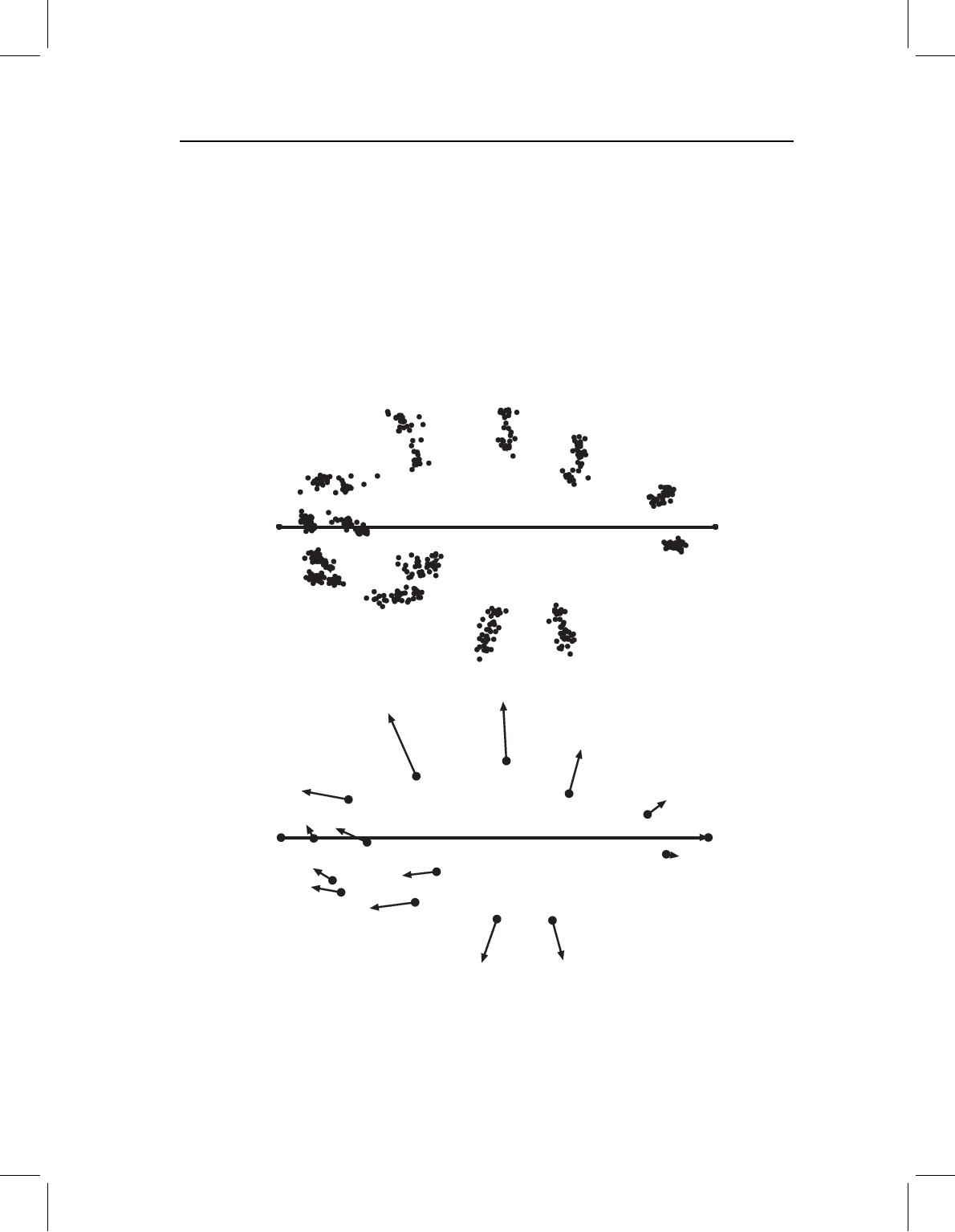
(A)
(B)
Figure 5.1 Variation in landmark positions relative to a fixed baseline for an ontogenetic series
of the piranha Serrasalmus gouldingi: (A) coordinates of landmarks relative to a fixed baseline that
extends between landmarks 1 and 7 (the tip of the snout and posterior termination of the hypural
bones); (B) vectors indicating displacements of landmarks relative to the fixed baseline. (The summed
squared lengths of these vectors does not equal the Procrustes distance between juvenile and adult
shapes.)
chap-05 4/6/2004 17: 23 page 107
SUPERIMPOSITION METHODS 107
of freedom. The advantage of the correspondence of these numbers is that we can perform
analytic tests like Hotelling’s T
2
without discarding variables. Because the four coordinates
of the baseline are fixed, the orientation of the baseline is standardized. The advantage of
this is that the pictures of the superimposed configurations are often quite easy to interpret,
especially if the baseline is an important morphological feature like an anatomical axis.
The most notable disadvantages of BC also lie in standardizing the coordinates of the
baseline. One of these disadvantages arises because there are no truly invariant landmarks;
every landmark varies in location relative to all of the others. Fixing the locations of the
two landmarks that serve as endpoints of the baseline means that the variance of those
landmarks must be put somewhere. In an ontogenetic series of the piranha Serrasalmus
gouldingi, superimposed at two landmarks near the dorsoventral midline (Figure 5.1A),
we can see that the three most dorsal landmarks vary primarily along the dorsoventral axis.
When we regress these coordinates on log centroid size (using methods discussed in Chapter
10), we see that these landmarks move away from the midline during growth (Figure 5.1B).
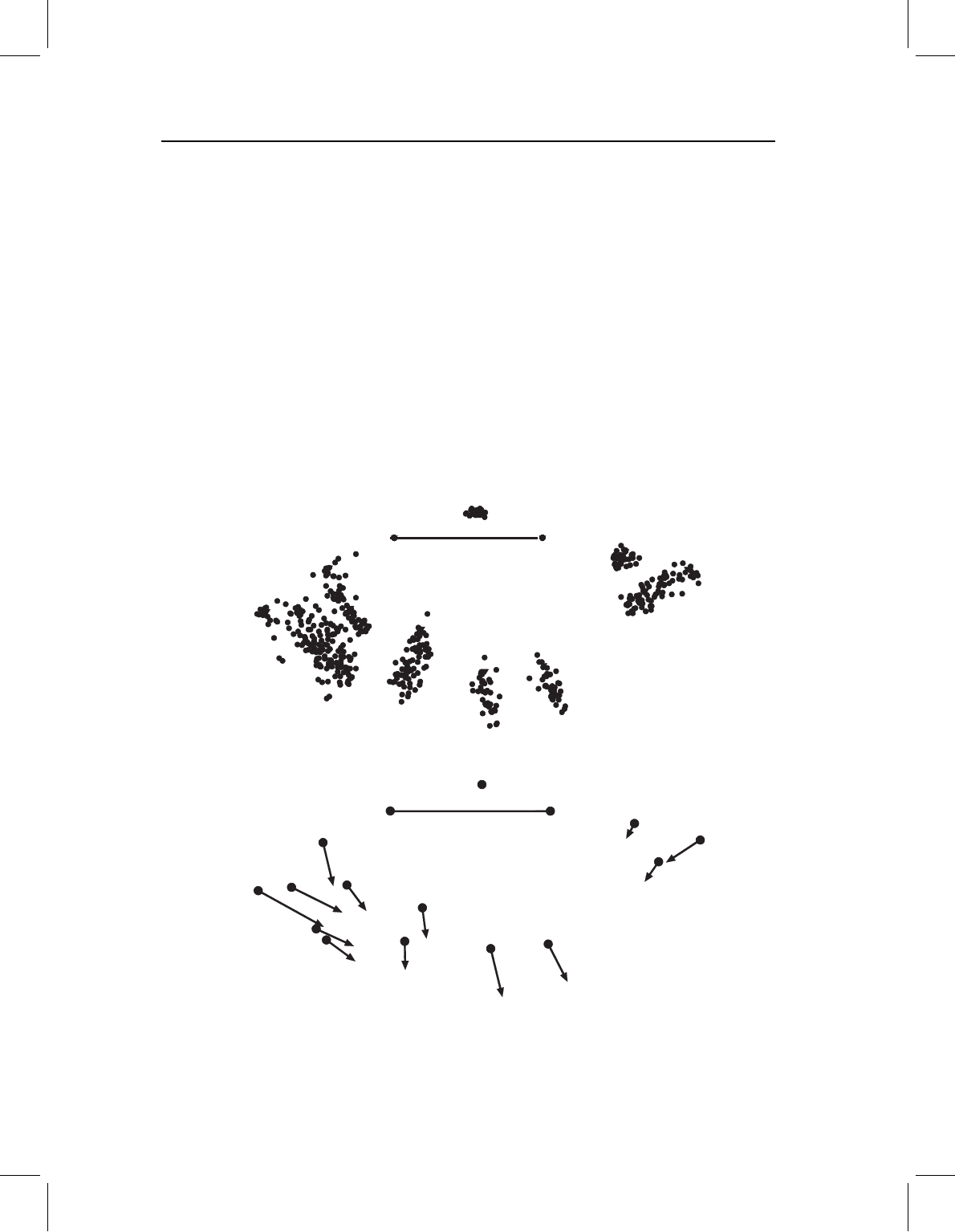
If two of the dorsal landmarks are used as the baseline, the pictures look strikingly
different (Figure 5.2). The dorsoventral component has been removed from all three dorsal
(A)
(B)
Figure 5.2 Ontogenetic variation in S. gouldingi visualized relative to a baseline on the dorsal body
(landmarks 3 and 5): (A) coordinates of landmarks relative to the baseline; (B) vectors indicating
displacements of landmarks relative to the fixed baseline. (Note the greater apparent magnitude of
the variance landmarks compared to Figure 5.1.)