Yangsheng Xu, Yongsheng Ou. Control of Single Wheel Robots
Подождите немного. Документ загружается.


52
3M
od
el-based
Con
trol
measured fromAtoO(the origin of theframe), Gyrover’s orientation θ with
respect to the inertial frame, anddefining ψ = θ − α as theangle measured
between the vehicle principalaxis andthe distance vector e .When e =0,
th
er
ei
sn
od
efi
ni
tion
fo
r
θ and ψ .T
hen
th
ef
ollow
ing
equations
ar
eo
btained
˙e = Ru
γ
C
ψ
˙
ψ = − u
α
− S
ψ
u
γ
/e
(3.48)
where C
ψ
:= cos ( ψ ), S
ψ
:= sin ( ψ )and e =0.Moreover, we define ψ =0and
˙
ψ = − u
α
,if e =0.
On the basis of the previous considerations, we arenow ready to ad-
dressthe aforementioned closedloopsteeringprobleminthe following general
terms.
Let the robot system be initially located at anynon-zerodistance from
the inertial frame and assume that all state variablesrequired aredirectly
measurable. Then findasuitable, if any, state feedbackcontrol law[u
α
,u
γ
]
T
whichg
uarant
ees the state
[
e, β − π/2 ,
˙
β ]t
ob
ea
symptotically driven to the
null point[0 , 0 , 0]
T
,whileavoidingany attainmentofthe conditions of β =0
(or β = π )i
na
finitetime.
Proposed Controller
Proposition 2 Consider the system (3.47) with the feedbackcontrol laws u
α
and u
γ
,
u
α
= − k
3
Sgn ( C
ψ
) Sgn ( β − π/2+
˙
β )
u
γ
= − ( k
4
e + u
k
) Sgn ( C
ψ
)
(3.49)
where Sgn , K
3
and k
4
aredefined in Equations (3.50) and (3.51), k
4
is a
po
sitivescalarconstantand
k
4
<k
3
− 1,w
hichc
an be
designed.
Anystate ( e, β − π/2 ,
˙
β )starting fromthe domain D definedby
D = { ( e (0),β(0) − π/2 ,
˙
β (0))| e>0 , 0 <β<π,
( β − π/2)
2
+(β − π/2+
˙
β )
2
/ 2 <π/ 2 ,
e, β,
˙
β ∈ R
1
}
converges to
thep
oint
[0
, 0 , 0]
T
.
Proof: First, let Sgn (.) be asign function described as follows:
Sgn ( x )=
1 ,ifx≥ 0
− 1 ,ifx< 0
(3.50)
Let k
3
> 2beapositivescalarconstant,which can be designedand should
be less then ˙α
mam
.Let
f
1
=
G
m
C
β
+ I
m
C
β
S
β
k
2
3
u
k
=(
2(β − π/2+
˙
β )
+ f
1
) / ( J
m
S
β
k
3
) .
(3.51)

3.2
Non
linear
Mo
del
53
Set
V = V
1
+ V
2
V
1
=(( β − π/2)
2
+(β − π/2+
˙
β )
2
) / 2
V
2
= e
2
/ 2 .
(3.52)
Thetime derivative
˙
V is given by
˙
V =
˙
V
1
+
˙
V
2
where
˙
V
1
=2( β − π/2)
˙
β +(β − π/2+
˙
β )(
˙
β +
¨
β )
Substituting Equations(3.51) and(3.49) into Equation (3.47), we obtain
( β − π/2+
˙
β )
¨
β = − ( G
m
C
β
+ IC
β
S
β
k
2
3
)(β − π/2+
˙
β )
−
( G
m
C
β
+ I
m
C
β
S
β
k
2
3
)(β − π/2+
˙
β )
− J
m
S
β
k
3
k
4
e
β − π/2+
˙
β
− 2(β − π/2+
˙
β )
2
≤−2(β − π/2+
˙
β )
2
suchthat
˙
V
1
≤−( β − π/2)
2
−
˙
β
2
− ( β − π/2+
˙
β )
2
Thus V
1
is po
sitivedefinite and
˙
V
1
is negatived
efinite. The
remainingp
rob-
lem concerns why β will not reach0or π during theentire process. Since
| β − π/2 |≤
V
1
(0) <π/ 2and V
1
is monotonically non increasing,they
guarantee0<β<π.
˙
V
2
= e ˙e
= − eR | C
ψ
| ( k
4
e + u
k
)
≤−k
4
e
2
R | C
ψ
|
Since R , k
3
, k
4
, S
β
and u
k
arep
ositive,
˙
V
2
≤ 0. In fact,
˙
V
2
is strictly negative,
except when
e =0
C
ψ
=0
(3.53)
In these cases
˙
V
2
=0.Equation (3.53)presents two possible solutions for the
system.
Moreover, C
ψ
=0is not asolution,whichisevidentfromEquation(3.48).
By substituting u
α
and u
γ
into Equation(3.48),wehave
˙
ψ = Sgn ( C
ψ
)(k
3
Sgn ( β − π/2+
˙
β )+S
ψ
( k
4
e + u
k
) /e) .
Because β → π/2,
˙
β → 0and C
β
→ 0, u
k
will vanish. Thus we obtain
˙
ψ = Sgn ( C
ψ
)(k
3
Sgn ( β − π/2+
˙
β )+k
4
S
ψ
) .
Since k
3
− 1 >k
4
> 0, during anysampling period,
˙
ψ is not zero. Hence, any
system trajectory startingfromaset in C
ψ
=0will not remain there. Thus,
e =0is the only solution, according to the LaSalle Propositionfor nonsmooth
systems in [95]. Therefore, the proposition is proven.

54
3M
od
el-based
Con
trol
3.2.3Line TrackingControl
Foramobile robot,suchasGyrover, most traveling tasks can be realizedby
following connected segments of straightlines. Forexample, Figure 3.14shows
amobilerobot’stravelpath alongaseries of connectedcorridors.
Ho
wt
or
ealize
the
straigh
tl
ine
fo
llo
wing
while
ke
eping
th
er
ob
ot
ve
rti-
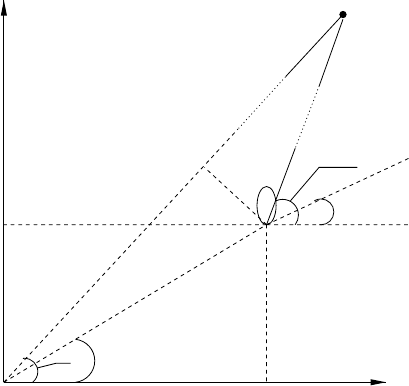
cal is ourcontrol problem. As depicted in Figure3.15,where ( x
2
,y
2
)isthe
coordinate of the second point, let us consider Gyroverinitiallypositioned
at aneighborhood of theorigin (i.e., thestart point) and standing almost
vertically, abouttotakeastraightline so as to approachthe second point.
Robot
door
Lab
Fig. 3.14. The robot’s path along connected corridors.
Let us
define
r , e and d ,w
hichare nonnegative,asthe distancesfromA
to the origin, the line andthe second point, respectively. θ and φ aredefined
as in Figure 3.15. Then,wehavethe following equations
e ˙e = rRu
γ
S
φ − α
S
φ − θ
d
˙
d = pRu
γ
p = rC
θ − α
−
x
2
2
+ y
2
2
C
φ − α
= − dC
ϕ − α
where S
φ − α
:= sin ( φ − α ), S
φ − θ
:= sin ( φ − θ ), C
φ − θ
:= cos ( φ − θ ), and
C
ϕ − α
:= cos ( ϕ − α ).
On thebasisofprevious considerations, we arenow readytoaddressthe
aforementioned closedloopline trackingproblemingeneral terms.
Let the robot initially locate at some neighborhood of theorigin andas-
sume that all state variablesbedirectly measurable; then findasuitable (if
3.2
Non
linear
Mo
del
55
X
Y
x
y
α
e
O
( x y)
θ
φ
22
r
B
P
ϕ
d
Fig. 3.15. The parameters in the line tracking problem.
any) feedback control law[u
α
,u
γ
]
T
that guarantees the state [ β − π/2 ,
˙
β,e, d ]
T
to be
asymptoticallydriven to the point[0
, 0 , 0 , 0]
T
,w
hilea
voidingany
at-
tainmentofthe conditionsof β =0(or β = π )infinitetime.
Proposition3Consider the system (3.47) with the feedbackcontrol la
ws
u
α
and u
γ
,
u
α
= − k
3
Sgn ( S
φ − α
S
φ − θ
) Sgn ( β − π/2+
˙
β )
u
γ
= − ( f
2
+ u
k
) Sgn ( S
φ − α
S
φ − θ
)
(3.54)
where f
2
is defined in Equation(3.56).
Anys
tate, startingf
rom[
β (0) − π/2 ,
˙
β (0),e(0),d(0)] with 0
<β(0) <π
and e (0) > 0, converges to thepoint [0, 0 , 0 , 0]
T
.
Proof:
First, we
introduce some
definitions.
Sgn ( . ), f
1
and u
k
aredefined as in Equations(3.50) and(3.51).
Let Θ (.) be
as
ign function described
as
follows:
Θ ( x )=
1 ,ifx≥ 0
0 ,ifx< 0 .
(3.55)
We let
f
2
= k
5
Θ ( pSgn( S
φ − α
S
φ − θ
)) (3.56)
where k
5
is apositive scalarconstantwhichcan be designed andshould be
less than ˙γ
max
.

56
3M
od
el-based
Con
trol
V = V
1
+ V
2
+ V
3
V
1
=(( β − π/2)
2
+(β − π/2+
˙
β )
2
) / 2
V
2
= e
2
/ 2
V
3
= d
2
/ 2
(3.57)
Thetime derivative
˙
V is given by
˙
V =
˙
V
1
+
˙
V
2
+
˙
V
3
where
˙
V
1
=(β − π/2)
˙
β +(β − π/2+
˙
β )(
˙
β +
¨
β )
≤−( β − π/2)
2
− ( β − π/2+
˙
β )
2
˙
V
2
= e ˙e
= − rR | S
φ − α
S
φ − θ
| ( f
2
+ u
k
)
˙
V
3
= d
˙
d
= pRu
γ
.
Since r , R , f
2
and u
k
aren
onnegative,
˙
V
2
≤ 0. This meanst
hatt
he first
term e is alwaysnon increasingi
nt
ime andinthe consequence. If
d =0is
maintained, e is also zero. Moreover, fromFigure 3.15, S
φ − θ
=0an
d
e =0
can be deduced from eachother.˙α will never be zero, for ˙α = u
α
.B
ecause
φ
is aconstantvalue, it is trivial to know that e will not stop decreasing until
e =0.
V
1
is po
sitivedefinite and
˙
V
1
is negatived
efinite. At
theb
eginning
β is
nearvertical, so that during theentire process, β ≈ π/2issustained.That
means cos
β → 0and u
k
.
=0.Byomitting them,
˙
V
3
= − k
5
pSgn( S
φ − α
S
φ − θ
) Θ ( pSgn( S
φ − α
S
φ − θ
)).
thus,
˙
V
3
is negatives
emi-definite. As
with
the
previous process, it is trivial
to prov
et
hatt
he only solution of thesystem, for
V
3
=0is d =0.T
hu
s,
we
prove theproposition.
3.2.4 Simulation Study
The following simulation study is basedonrobot system parameters as shown
in Table 3.2.
m [ kg] R [ m ] g [ m/s
2
] I
x
[ kgm
2
] I
y
I
z
8.05 0.17 9.8 0.116 0.116 0.232
Table 3.2. Physicalparameters.
Set
3.2
Non
linear
Mo
del
57
Balance Control
With regard to balance control, the initial condition seems to be toonarrow
fort
he
constrain
t,
σ<
π/
2.
If
we
mak
ea
sma
ll
mo
dificationt
o
u
6
as
follow
s,
thecontroller can be usedinawider rangeofinitialconditions.
u
6
= − ((2 + k
1
)(β − π/2) +(3+2k
1
)
˙
β +(2+k
1
)
¨
β + h
1
( t )
˙
β + h
2
( t ) u
5
) /h
3
( t )
where k
1
is apositive number,whichcan be designed.Toprove the subsys-
tem β,
˙
β,
¨
β is
asymptotically
stabilized,
we
cons
ider
th
ef
ollow
ing
Ly
apunov
functioncandidate
V
∗
=(β − π/2)
2
/ 2+(
˙
β + β − π/2)
2
/ 2+(
¨
β +(1+k
1
)(
˙
β + β − π/2))
2
/ 2 .
Its derivativeis
˙
V
∗
= − ( β − π/2)
2
− k
1
(
˙
β + β − π/2)
2
− (
¨
β +(1+k
1
)(
˙
β + β − π/2))
2
.
We completed two sets of simulationsfor balance control to compare the
different
effects of
k
1
.T
he initial parameters areshown
in
Table 3.3.
β
0
[ rad ]
˙
β
0
[ rad/s] ˙α
0
˙γ
0
π/4 3 8 -8.660381
Table 3.3.
Initialparameters in
balance control.
In thefirst simulation, k
1
=10, thetarget andother gain parameters are
shown in Table 3.4.
β
d
[ rad ]
˙
β
d
[ rad/s] ˙α
d
˙γ
d
k
1
k
2
π/2 0 0 0 10 1
Table 3.4. Target and gain parameters in balance control I.
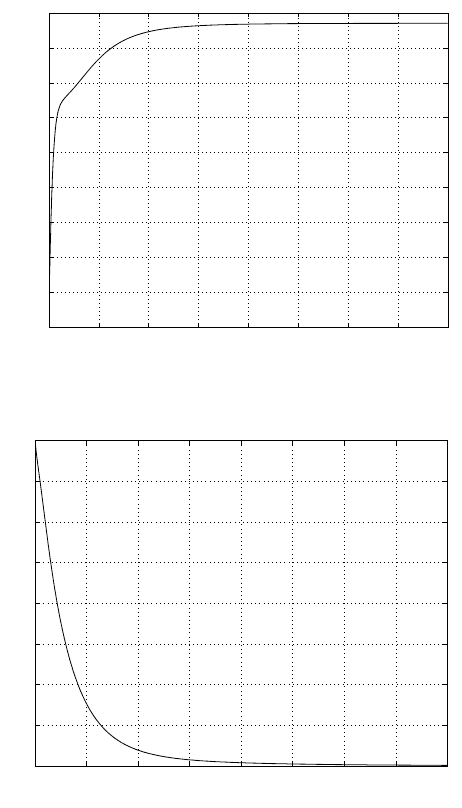
Thetime span of thesimulationisfrom0to16.0s.The results areshown
in Figures 3.16, 3.17, 3.18 and3.19 .
In the second simulation,except for
k
1
=1,all other parameters arethe
same as in thefirst simulation.
The time span of thesimulationisfrom0to16.0s.The results areshown
in Figures 3.20, 3.21, 3.22 and3.23 .
Even thoughitispossible that the states in simulation II will converge,
the control process in simulation Iisfaster andsmoother.
58
3M
od
el-based
Con
trol
0 2 4 6 8 10 12 14 16
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6
Time (s)
β
Fig. 3.16. Leaning angle β in balance control.
0 2 4 6 8 10 12 14 16
0
1
2
3
4
5
6
7
8
Time (s)
˙α
Fig. 3.17. Precession angle velocity ˙α in balance control.
PositionControl
We have set the initial values of thesimulation in Table 3.5.
The target parameters areshown in Table 3.6.
The time span of thesimulation is from0to16s. Theresults areshown
in Figures 3.24, 3.25, 3.26 and3.27.
This simulation demonstratesthatthe proposed pointtopoint controller
is correct.
3.2
Non
linear
Mo
del
59
0 2 4 6 8 10 12 14 16
−9
−8
−7
−6
−5
−4
−3
−2
−1
0
Time (s)
˙γ
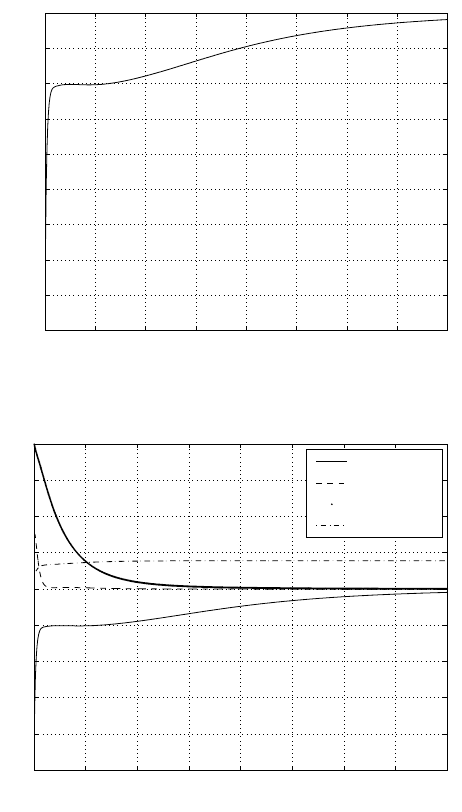
Fig. 3.18. Driving speed ˙γ in balance control.
0 2 4 6 8 10 12 14 16
−10
−8
−6
−4
−2
0
2
4
6
8
Time (s)
˙γ
˙
β
˙α
β
Fig. 3.19. Parameters of ˙α, β,
˙
β, ˙γ in balance control.
Line TrackingControl
Theaim of the simulation is to trackastraight line so as to demonstrate the
efficiency of the proposed line trackingcontroller.Fromthe neighborhood of
an origin, therobot is drivenalong astraight line to reachthe point(3,4).
The initial values of the simulation areshown in Table 3.7.
Thetarget parameters areshown in Table 3.8.

60
3M
od
el-based
Con
trol
0 2 4 6 8 10 12 14 16
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6
Time (s)
the
Fig. 3.20. Leaning angle β in balance control II
.
0 2 4 6 8 10 12 14 16
0
1
2
3
4
5
6
7
8
Time (s)
˙α
Fig. 3.21. Precession angle velocity ˙α in balance control II.
The time span of thesimulation is from0to32s. Theresults areshown
in Figures 3.28, 3.29, 3.30 and3.31.
Here, large values of k
3
and k
5
arebetter, however, theyshould be less
than the ˙α
max
and˙γ
max
,respectively.
Despite this, thereare some drawbacks in thecontrol process. The firstis
the system states exhibit highly oscillatorybehavior and the second is that
controlinputs sometimesneed to switchtoo sharply andfast.Both will cause
difficulties forreal time controland result in worse performance.Tosolve

3.2
Non
linear
Mo
del
61
0 2 4 6 8 10 12 14 16
−9
−8
−7
−6
−5
−4
−3
−2
−1
Time (s)
˙γ
Fig. 3.22. Driving speed ˙γ in balance control II.
0 2 4 6 8 10 12 14 16
−10
−8
−6
−4
−2
0
2
4
6
8
Time (s)
˙γ
˙
β
˙α
β
Fig. 3.23. Parameters of ˙α, β,
˙
β, ˙γ in balance control II.
these problems, we propose to replace thesign functions in the controllers
with tanh functions.
Definition 3 Tanh( . )isabipolar function described as follows:
Tanh( x )=
1 − e
− k
6
x
1+e
− k
6
x
(3.58)
where k
6
is apositive scalarconstant, whichcan be designed. Tanh( . )isshown
as in Figure 3.32.