Yangsheng Xu, Yongsheng Ou. Control of Single Wheel Robots
Подождите немного. Документ загружается.

42
3M
od
el-based
Con
trol
resultsand the initial conditionsare shown in Figures 3.5, 3.6, 3.7 andTa-
ble 3.1, respectively.Inthesesimulations, the rolling speed ˙γ of therobot is
controlled to anominalrollingspeed Ω
◦
=30 rad/s,thusthe contact point
ve
lo
cit
y
υ
a
is also aconstant. Thesmoothness is set to 30.
Forsimulation S 1, therobot hasasmaller path curvaturethaninsim-
ulation S 2, because its initial headingangle ϕ (0) in simulation S 1isless
deviatedfromthe Y-axisthaninsimulation S 2. Furthermore, since therobot
hasl
arger
pa
th
cur
va
turei
ns
im
ul
ation
S 2,
it
resultsi
ns
harp
er
turns.T
ot
his
end,the robothas to lean steeper to provide asufficient steering velocity˙α in
simulation S 2. Thesituation becomes more serious in simulation S 3. Figure
3.7 shows the leanangle β is saturated in 5sec. Because the initial heading
angle ϕ (0) is more than 90
◦
,inorder to ensure the curvature continuitywhile
follow
ing
the
Y-axis,
it
should
ha
ve
the
la
rgest
path
curva
turea
mong
them
suchthatthe lean angle β of therobot is thesteepest, to provide asufficient
steeringvelocity. As we have alreadyset up alimit for the state feedback
controller, the lean anglecan only be stabilized within β ∈ ( − 60
◦
, 60
◦
). Oth-
erwise, the controller will become saturated andthe lean angle will be fixed
at thelimiting value. When the
robot
graduallyapproaches theY-axis, the
leanangle graduallyincreasesuntil it reaches the verticalposition (90
◦
).
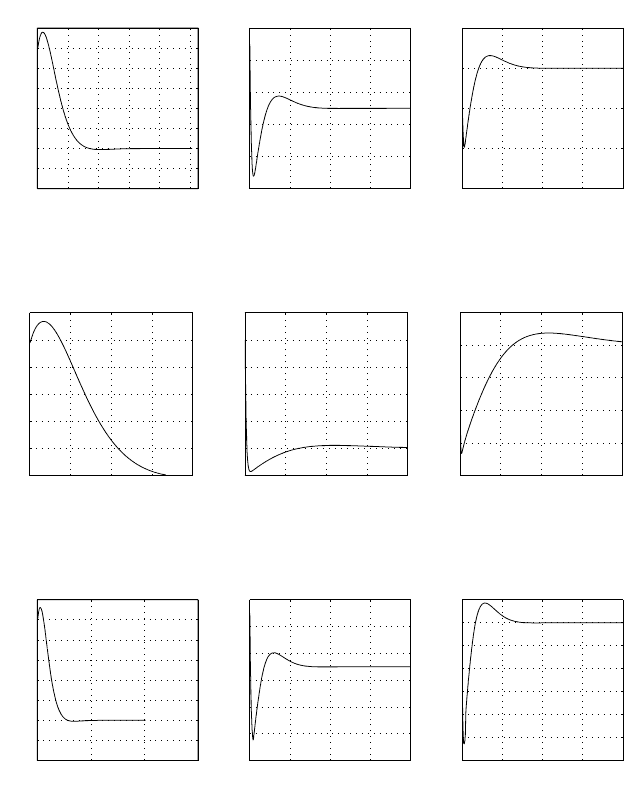
Effectofthe rolling speed
In this section, we studythe effect of therollingspeed of the robot˙γ on
the path following controller.
The sim
ulation results with differentrolling
speeds areshown in Figures 3.8 and3.9, both with the same initial conditions
as in simu
lation
S 1. Fo
r˙
γ =30 rad/s,t
he robo
tc
onve
rges to the Y-axis
more rapidly than the other one, comparingFigures 3.8a and3.9a.From
Figures 3.8b and3.9b, the change of thelean angle β of therobot with a
lowe
rr
ollings
peed is more significantthanthatofthe robotwith ah
igher
rolling speed. It is because, for the robot with agreaterrollingspeed, based
on Eq. (3.16), alesser steering velocit
yi
sr
equired fortracking the same
path
curvature feedback κ .Thus, the change of thelean angle β decreasesaccording
to Eq. (3.9).
3.2 Nonlinear Model
Recently, there has been growing interest in the design of feedback con-
trol laws for nonholonomic systems [57]. Due to Brockett’s theorem in [123], it
is well known that a nonholonomic control system cannot be asymptotically
stabilized to a resting configuration by smooth time-invariant control laws
[18]. Despite this, several discontinuous or time-variant approaches have been
proposed for stabilizing such systems in [18], [46], [57], [63] and [104]. The
references above refer to systems with first-order nonholonomic constraints,
3.2
Non
linear
Mo
del
43
0 20 40 60 80 100
−2
−1
0
1
2
3
4
5
6
(a)
0 5 10 15 20
40
60
80
100
120
140
(b)
0 5 10 15 20
−0.03
−0.02
−0.01
0
0.01
(c)
β [ deg]
x [ m ]
y [ m ]
tt
κ
Fig.
3.8.
The
si
mu
lation
results
forf
ollow
ing
theY
-axis
with
˙
γ =1
0
ra
d/s
.
0 10 20 30 40
0
1
2
3
4
5
6
(a)
0 5 10 15 20
80
90
100
110
120
130
140
t
(b)
0 5 10 15 20
−20
−15
−10
−5
0
5
x 10
−3
t
(c)
β [ deg]
x [ m ]
y [ m ]
κ
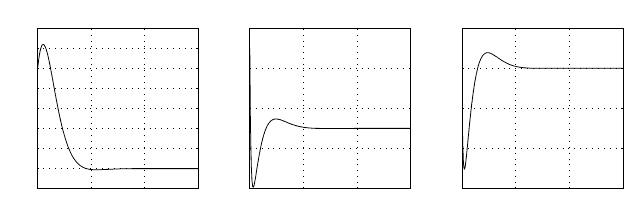
Fig. 3.9. The simulation results forfollowing theY-axis with ˙
γ =30 rad/s.
0 50 100 150
−2
−1
0
1
2
3
4
5
6
(a)
0 5 10 15 20
20
40
60
80
100
120
140
(b)
0 5 10 15 20
−0.03
−0.025
−0.02
−0.015
−0.01
−0.005
0
0.005
(c)
β [ deg]
x [ m ]
y [ m ]
tt
κ
Fig. 3.10. The simulation results forfollowing theY-axis with σ =20.
whichcan usuallybeexpressed in terms of nonintegrable linear velocityre-
lationships. However, there areanotherkind of mobilerobot systems, which
possess both first-order and second-order nonholonomic constraints, such as
ourrobot –Gyrover, bicyclesand motorcycles.Mobilerobots have their in-
herentnonholonomicfeatures, whichcan be describedasfirst-order nonholo-
nomicconstraints amongjointvelocities and Cartesian space velocities. These
constraints arise when robotsroll on theground without slipping.Because no
actuators can be useddirectly for stabilizationinthe lateraldirection, these
44
3M
od
el-based
Con
trol
0 50 100 150
−1
0
1
2
3
4
5
6
7
(a)
0 10 20 30
60
80
100
120
140
(b)
0 10 20 30
−15
−10
−5
0
5
x 10
−3
(c)
β [ deg]
x [ m ]
y [ m ]
tt
κ
Fig.
3.11.
The
si
mu
lation
results
forf
ollow
ing
theY
-axis
with
σ =4
0.
systems areunderactuatednonlinearsystems. This induces another nonholo-
nomic constraintofrobots.Thus, to compare with the aboveresearchwork,
our mobilerobot systems–Gyrover, is more challengingtobecontrolled.
This work canprovide some ideas forthatclass of problems. In this thesis,
we want to control an underactuatedmobilerobot system –Gyrover. Thereare
two
con
trol inputs:one is
thesteeringt
orque(
or steering rate)and theother
is thedriving torque (ordriving speed). However, we have four independent
generalizedcoordinatest
oc
ontrol: (1)
thel
ean angle, (2)the heading angle,
(3) theCartesian space X axis, (4) theCartesian space Y axis.
Pa
pe
rs [6]a
nd [7]a
ssumed that
the
robot
remained around the vertical
position, whichsimplifythis nonlinearsystem to alinear one. Therefore vali-
dation of theresults can be limited. Some work hadbeen about the tracking
of arollingdisk, suchasin[87], whichassumed three control inputs in the
direction of
steering, leaninga
nd rolling,where no
unactuatedj
ointand no
second-order constrainti
sp
resented.I
n[
34], thea
uthors
implified the bicycle
dynamic model, andused velocities as control inputs to enable the lean angle
(called “roll-angle” in that paper)
to trackt
rajectories, which
ha
ve
con
tinu-
ousdifferentials. However, the controller couldnot guaranteethatthe bicycle
would nottopple over,i.e. the lean angle wasout of range, before convergence.
In thischapter, we focus on three controlproblems that have notyet been
solved forGyrover. Thefirst oneisthe balance of therobot whilestand-
ing. The second one is concerned with point-to-pointcontrol. Thethird one
relatestofollowing astraightline. These three problems are of significance
in controlling asystem with both first-order and second-order nonholonomic
constraints.
InertiaMatrix and Nonholonomic Constraints
Thekinematics anddynamics of Gyrover are different fromthose of unicycles,
suchasin[1]. Thedifference lies in the assumption that the unicycle always
remainsvertical. On the contrary,Gyrovercan be considered as arollingdisk
whichisnot constrainedtothe verticalposition and is connected to ahigh
3.2
Non
linear
Mo
del
45
speed spinning flywheel. This modelcan servewell as asimplification for the
study of amodel of Gyrover.
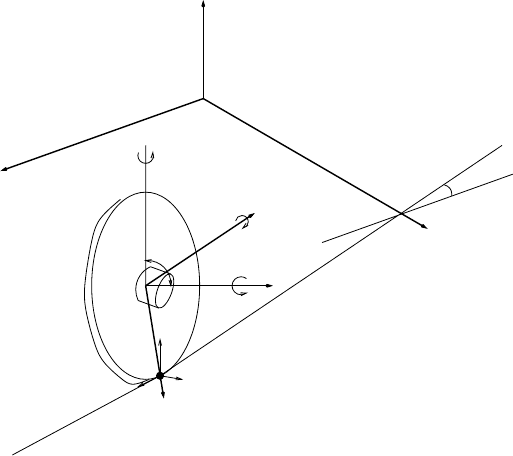
Consider adisk rolling without slipping on ahorizontal planeasshown in
Figure
4.9.
Let
o
X, Y, Z and
c
x, y, z be the inertial frame whose x − y
plane is anchored to theflat surface andthe body coordinate frame whose
origin is locatedatthe center of therollingdisk, respectively.Let ( X, Y,Z )be
the Cartesian coordinates of thecenter of mass(c )with respect to the inertial
frame
o
.Let A denote the pointofcontactonthe disk. The configuration
of thedisk canbedescribed by six generalizedcoordinates(X, Y,Z, α, β,γ ),
where α is the steering (precession) anglemeasured from X -axis to the contact
line, β ∈ (0,π)isthe lean (nutation)angle measured from Z -axis to the z ,and
γ is the rolling angle. R is the radius of Gyrover. m, I
x
,I
y
and I
z
represent
the total mass and the momentofinertia of Gyrover.
Z
Y
X
o
x
z
α
.
β
β
.
γ
.
α
L
τ
A
z
ν
y
c
Fig. 3.12. System parametersofGyrover’s simplified model.
In thederivationofthe model,weassume that the wheel rolls on the
groundwithout slipping. Based on the previous derivation in [112]and letting
S
x
:= sin ( x ), C
x
:= cos ( x ), the dynamic model is
M ( q )¨q = N ( q, ˙q )+Bu (3.29)
˙
X = R (˙γC
α
+˙αC
α
C
β
−
˙
βS
α
S
β
)
˙
Y = R (˙γS
α
+˙αS
α
C
β
+
˙
βC
α
S
β
)
(3.30)
46
3M
od
el-based
Con
trol
TT
where q =[α, β, γ ] ,N =[N,N,N ]
123
M =
M
11
0 M
13
0 M
22
0
M
31
0 M
33
B =
100
001
T
,u=
u
1
u
2
M
11
= I
x
S
2
β
+(
2
I
x
+ mR
2
) C
2
β
M
13
=(2 I
x
+ mR
2
) C
β
M
22
= I
x
+ mR
2
M
31
= M
13
M
33
=2I
x
+ mR
2
N
1
=(I
x
+ mR
2
) S
2 β
˙α
˙
β +2I
x
S
β
˙
β ˙γ
N
2
= − mgRC
β
− ( I
x
+ mR
2
) C
β
S
β
˙α
2
− (2I
x
+ mR
2
) S
β
˙α ˙γ
N
3
=2( I
x
+ mR
2
) S
β
˙α
˙
β,
where(X , Y , Z )i
st
he robo
t’s center of
massc
oo
rdinate with
respect to the
inertial frame as shown in Figure4.9. M ( q ) ∈ R
3 × 3
and N ( q, ˙q ) ∈ R
3 × 1
are
the inertial matrix andnonlinearterms, respectively.Equations (3.29) and
(3.30) form the dynamic model andfirst-order nonholonomicconstraints in
the form of
velocit
y.
In order to simplify the control design, we will transform the inertia matrix
of them
od
el to ad
iagonal matrix and reduce the
nonlinear terms
of the
dynamicmodel. We firstintend to cancel some nonlinear terms by letting
u
1
= − N
1
+ u
3
u
2
= − N
3
+ u
4
.
(3.31)
Substituting Equation (3.31) into Equation (3.29) yields
M
11
¨α + M
13
¨γ = u
3
M
22
¨
β = − mgRC
β
− ( I
x
+ mR
2
) C
β
S
β
˙α
2
− (2I
x
+ mR
2
) S
β
˙α ˙γ
M
31
¨α + M
33
¨γ = u
4
(3.32)
Fr
om thefi
rst andthird equations in Equation (3.32) solving withr
espect to
¨α and¨γ oneo
btains
M
ρ
= M
11
M
33
− M
2
13
.
Due to its “shell” structure, even when Gyrover topplesover, thelean angle
is not zero, so that S
2
β
> 0and M
ρ
> 0for all t .Then, we let
u
5
=(M
33
/M
ρ
) u
3
− ( M
13
/M
ρ
) u
4
u
6
= − ( M
13
/M
ρ
) u
3
+(M
11
/M
ρ
) u
4
andobtain
3.2
Non
linear
Mo
del
47
¨α = u
5
M
22
¨
β = − mgRC
β
− ( I
x
+ mR
2
) C
β
S
β
˙α
2
− (2I
x
+ mR
2
) S
β
˙α ˙γ
¨γ = u
6
(3.33)
Equation (3.30) is nonintegrable, whichisdefined in [86]. Hence, it is the
first-order nonholonomicconstraintofthe robotsystem. Moreover,wenote
that no controlinput is available foractuatingdirectly on leanangle β .This
forms
ac
onstrain
ti
nt
he
fo
rm
of
ac
celerations.
G.
Orio
lo
i
n[
80]
pro
po
sed
some necessary conditions forthe partial integrabilityofsecond-order non-
holonomic constraints, oneofthe conditions is that thegravitational term G
u
is constant. In Equation(3.33),the gravitational term variesalong β ,thusit
is anonintegrable,second-order nonholonomic constraint.
3.2.1Balance Control
Problem Statement
Our firstcontrol problemistoenable therobot to standvertically,i.e., to
stabilize the
leanangle
β to π/2and
˙
β ,
¨
β ,˙α and˙γ to zero.
Based on theprevious consideration,weare nowable to specifymore
clearly the
aforementioned closed loop steeringp
robleminthe following gen-
eral terms.
Let the robotsystem defined in Equation(3.33) be initially moving in
an undesired state
and assume all the
essentials
tate va
riablesa
re directly
measurable.Then find asuitable (ifany)state dependentcontrol law[u
5
,u
6
]
T
,
whichguarantees the states [ β − π/2 ,
˙
β,
¨
β, ˙α, ˙γ ]tobeasymptotically driven
to the null limiting point[0
, 0 , 0 , 0 , 0]
T
,w
hilea
voidingany
attainmentofthe
conditions of β =0(or β = π )inany finitetime.
Balance Control
First, we
let
G
m
= mgR/M
22
I
m
=(I
x
+ mR
2
) /M
22
J
m
=(2 I
x
+ mR
2
) /M
22
(3.34)
where G
m
, I
m
and J
m
arepositive scalarconstant.
Then,the dynamicequations become
¨α = u
5
¨
β = − G
m
C
β
− I
m
C
β
S
β
˙α
2
− J
m
S
β
˙α ˙γ
¨γ = u
6
.
(3.35)
Letting x
( i )
be the i
th
time derivativeof x ,then fromEquation(3.35),we
have
β
(3)
= h
1
( t )
˙
β + h
2
( t ) u
5
+ h
3
( t ) u
6
(3.36)

48
3M
od
el-based
Con
trol
where
h
1
( t )=G
m
S
β
− I
m
C
2 β
˙α
2
− J
m
C
β
˙α ˙γ
h
2
( t )=− I
m
S
2 β
˙α − J
m
S
β
˙γ
h
3
( t )=− J
m
S
β
˙α.
Set β (0) − π/2=a,
˙
β (0)
=
b,
¨
β (0)
=
c ,a
nd
ar
eal
nu
mb
er
σ be
σ = | 3 a +2b + c | / 2+| a +2b + c | / 2+| a + b | /
√
2 .
Proposition 1 Consider the system (3.35) with the feedbackcontrol laws
u
5
and u
6
,
u
5
=
− (˙α −
4
√
k
2
V )i
f˙
α (0) > 0
− (˙α +
4
√
k
2
V )otherwise
(3.37)
where V is defined in Equation(3.39) and k
2
is apositive number,whichcan
be designed, and
u
6
= − (3(β − π/2) +5
˙
β +3
¨
β + h
1
( t )
˙
β + h
2
( t ) u
5
) /h
3
( t )(3.38)
where, h
1
( t ) ,h
2
( t ) ,h
3
( t )are definedasinEquation (3.36).
Anys
tate (˙
α, ˙γ,β,
˙
β,
¨
β )s
tarting fromt
he domain
D ,w
hichisdefined as
D = { (˙α (0), ˙γ (0),β(0),
˙
β (0),
¨
β (0))| ˙α (0) =0,
0 <β(0) <π,σ<π/ 2 , ˙α, ˙γ, β,
˙
β,
¨
β ∈ R
1
}
converges to thelimiting point[0 , 0 ,π/ 2 , 0 , 0]
T
.
To presentthe proof,weneed alemma.
Lemma 1:
Consider amechanical system with aconstraintamong anumberofstates
x
1
( t ) ,x
2
( t ) ,..., x
n
( t ) ∈ R
1
.O
ne of theses
tate va
riablesi
suniquelyd
etermined
by the other states; i.e., x
n
= f ( x
1
,x
2
,...x
n − 1
). Let the limit of x
n
exist as
t →∞anda
ll the other statesb
easymptotically stabilizable to some real
values. If allofthe statesare continuousand bounded, forall of t ,then, x
n
is also asymptotically stabilized to its limit, whichisdecided by theother
states.
Proof:
First, since x
n
( t )iscontinuousand bounded, forall t, it is stable.
Second,because allofthe other statesare asymptotically stabilized to
some values, thus
lim
t →∞
x
i
= e
i
exist i =1, 2 ,..., n − 1 .
Moreover, accordingtothe propertyoflimits, we have
lim
t →∞
x
n
=lim
t →∞
f ( x
1
,x
2
,...x
n − 1
) ,
lim
t →∞
x
n
= f (lim
t →∞
x
1
, lim
t →∞
x
2
,..., lim
t →∞
x
n − 1
) .

3.2
Non
linear
Mo
del
49
Because x
n
is uniquely decided by theother states andhas alimit as time
goes to infinity, x
n
will convergetothe limitdecided by theother states.
Then,weaddressthe proof for Proposition 1 .
Pr
oo
f:
First, to prove thesubsystem β,
˙
β,
¨
β asymptoticallystabilized, we consider
the
fo
llow
ing
Ly
apunov
func
tion
candidate
V =(β − π/2)
2
/ 2+(
˙
β + β − π/2)
2
/ 2+(
¨
β +2
(
˙
β + β − π/2))
2
/ 2 . (3.39)
We needtosolvetwo more problems before we can prove the subsystem is
asymptoticallystable. Oneiswhether ˙α is not zero in anyfinitetime; the
other is whether the controllers guarantee β is constrained in (0,π). We will
addressthe first problemlater. We prove the second problem by replacing u
6
into Equation(3.35).Wehave
β
(3)
= − (3(β − π/2) +5
˙
β +3
¨
β ) . (3.40)
By solvingthis lineardifferential equation, we obtain
β − π/2=e
− t
((3a +2b + c )+
√
2(a + b )sin
(
√
2 t ) − ( a +2b + c )cos
(
√
2 t ))/ 2 .
From σ<π/2, we
knowthat0
<β<πfora
ll t.
Then,fromEquation (3.39)the time derivativeof V is
˙
V =(β − π/2) +(
˙
β + β − π/2)(
¨
β +
˙
β )+(
¨
β +2(
˙
β + β − π/2))( β
(3)
+2(
¨
β +
˙
β )).
By substitutingEquation (3.40)intoit, we have
˙
V =(β − π/2)+(
˙
β + β − π/2)(
¨
β +
˙
β ) − (
¨
β +2(
˙
β + β − π/2))(3
¨
β +3
˙
β +3( β − π/2)).
Then,
˙
V = − ( β − π/2)
2
− (
˙
β + β − π/2)
2
− (
¨
β +2(
˙
β + β − π/2))
2
. (3.41)
We can usethe following Lyapunov function to prove˙α converging to zero.
V
a
=
k
2
V/4+ ˙α
2
/ 2 .
Fr
om Equations(3.39) and(
3.41),w
eh
av
e
˙
V = − 2 V. (3.42)
Thetime derivativeof V
α
is
˙
V
a
=
√
k
2
˙
V
8
√
V
+˙αu
α
.
By substitutingEquations (3.42) and (3.37)intoit,
50
3M
od
el-based
Con
trol
˙
V
a
= −
k
2
V/4 − (˙α ∓
4
k
2
V )˙α.
Then,
˙
V
a
= − (
4
k
2
V/2 ∓ ˙α )
2
. (3.43)
Then
we
pro
ve
th
at
th
ec
ondition˙
α =0
can
no
tb
ea
pproac
hed
in
an
y
finitetime. Without losing generality, we assume ˙α (0) > 0and let k
2
be 1.
If we let V (0) = V
0
,fromEquation (3.42), andbysolvingthe differential
equation, we obtain
V = e
− 2 t
V
0
.
By
putting
it
in
to
Equation(
3.37),w
eh
av
e
¨α = − (˙α − e
− t/2
4
V
0
) .
By solving this differential equation, we obtain
˙α = e
− t
˙α (0) +2(
e
− t/2
− e
− t
)
4
V
0
.
Thus, since ˙α (0) > 0, ˙α can notreachzero in anyfinitetime.
Sinces
in
β and˙α aren
ot zero in
an
yfinitetime, then
h
3
( t )doe
snot
become zero forall t andfromEquation (3.44), ˙γ is continuous.Wewill prove
that the limit of ˙γ exists and is zero, as time goes to infinity.
From Lemma1,ifweasymptotically stabilize
¨
β,β, ˙α andguarantee that
all of these states are continuous andbounded ,˙γ will asymptotically converge
to zero. Since ˙
α will never
be
zero, therea
re two
problems left.
Onei
sw
hether
β,
˙
β,
¨
β can be stabilized andthe other is whether we can guarantee 0 <β<π
fora
ll of
t .F
romEquation (3.35), we
ha
ve,
˙γ =
¨
β + G
m
C
β
+ I
m
C
β
S
β
˙α
2
− J
m
S
β
˙α
. (3.44)
As V and˙α reach
very small va
lues,
√
V is the higher order small of
4
√
V .
For | β − π/2 |≤
√
V , | β − π/2 | is the higher order small of
˙
α ,and
so
as
to
˙
β
and
¨
β .Using aTaylor series expansion, cos(β )isahigher order small of ˙α .
Thus, fromLemma 1and the aboveequation, ˙γ asymptoticallyconverges to
zero.
3.2.2 PositionControl
Here, we propose acontroller that drivesthe robottothe Cartesian space ori-
gin to studythe pointtopoint control problem. Thisisextremely important,
foritserves as thebasisfor Cartesian space tracking.
Since the originofthe frame XY ZO(
o )inFigure 4.9isfixed on the
ground, forthe purposes of trackingproblems,itismoredirect to use the point
of contactAon theground to describe the position of therobot, instead of
thecenter of mass. Let ( x
a
,y
a
)bethe coordinatesofthe contact pointAon
3.2
Non
linear
Mo
del
51
the ground thatcoincides withapointofcontactPofthe robotinFigure 4.9.
x
a
and y
a
can be expressedas
x
a
y
a
=
X − RS
α
C
β
Y − RC
α
C
β
(3.45)
DifferentiatingEquation (3.45)with respect to time, we obtain,
˙x
a
= R ˙γC
α
˙y
a
= R ˙γS
α
(3.46)
Thereare two kinds of input controlcommands forGyrover: oneset of con-
trol commandsare torques and theother set of commands are velocities. The
velocitycommands u
α
and u
γ
control ˙α and˙γ ,respectively.Thus, Equations
(3.30) and (3.33) transform into
˙α = u
α
¨
β = − G
m
C
β
− I
m
C
β
S
β
u
2
α
− J
m
S
β
u
α
u
γ
˙γ = u
γ
˙x
a
= Ru
γ
C
α
˙y
a
= Ru
γ
S
α
(3.47)
where G I and J are the same as in Equation (3.34).
m
,
mm
Problem Statement
Let us consider the robot with respect to the inertial frame XY Z O (
o ),
as shown in Figure 3.13. By representing the Cartesian position of the robot
in terms of its polar coordinates, which involves the error distance e ≥ 0,
X
Y
x
a
y
a
α
O
θ
ψ
A
e
Fig. 3.13. Parameters in position control.