Yangsheng Xu, Yongsheng Ou. Control of Single Wheel Robots
Подождите немного. Документ загружается.

6.5
Ex
pe
rimen
tal
Study
165
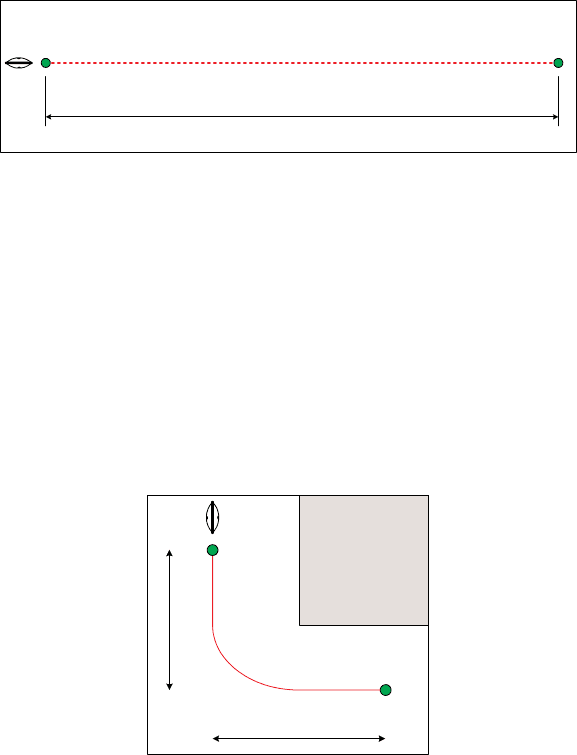
STARTFINISH
44 f
eets
Fig. 6.8. Experimentontracking astraightpath under shared control.
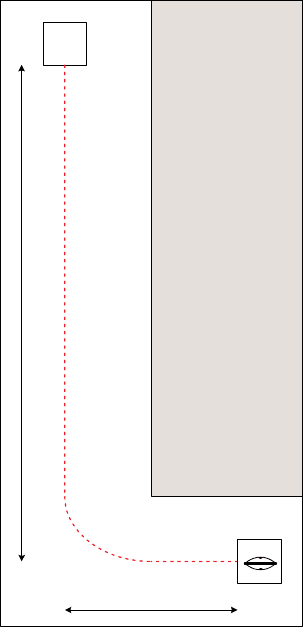
6.5.3Circular Path
Similar to thestraightpath test,the experimentalsetup is showninFigure 6.9.
This time, theoperatorisrequired to control the robot travel acircular path.
In ordertomakethe robottoturn in place,the operator needstothe tilt the
internal flywheel to makea“lean steering” precisely.Ifthe robotfailstofollow
the rightcommands, it
is
unable to
steer
we
ll. Figure 6.13indicatest
he desired
path andthe actualpath travelled by therobot respectively.Figure 6.14shows
the correspondingsensor data (trail #3)ofthe robotduring trav
ellingi
na
circular path.
START
FINISH
9 feets
7 feets
Fig. 6.9. Experimentontracking acurved path under shared control.
Theaverage offset in thecircular path test is 0.51ft. Althoughthe robot
cannot trackthe circular path precisely,the operator can control therobot
to move back to the target location within 0.25 ft at nearly theend of the
experiments. Therefore, with adegree of shared controlwith the robot, the
operatorisstill able to control the robot to turn atightcorner.
6.5.4 Point-to-pointNavigation
In this experiment, we requirethe robottotravelfromone location to another
whichare separatedbyaright-hand corner andthey arefar apart(≈ 60 ft),
1666
Shared
Con
trol
Figure6.10.The operator needs to controlthe robottomovefromastarting
area to aspecific destination, whichisa2ft × 2ftregion(thedimension of
Gyroverisabout 1 . 5ft × 0 . 8ftasviewed fromthe top). This experimenthas
two
main
goals:
1. Therobot must reachthe destination within thespecific area.
2. Afterthe robothas reached the destination, it is required that the robot
can maintain its lateral balance even when the operator does notfurther
control it.
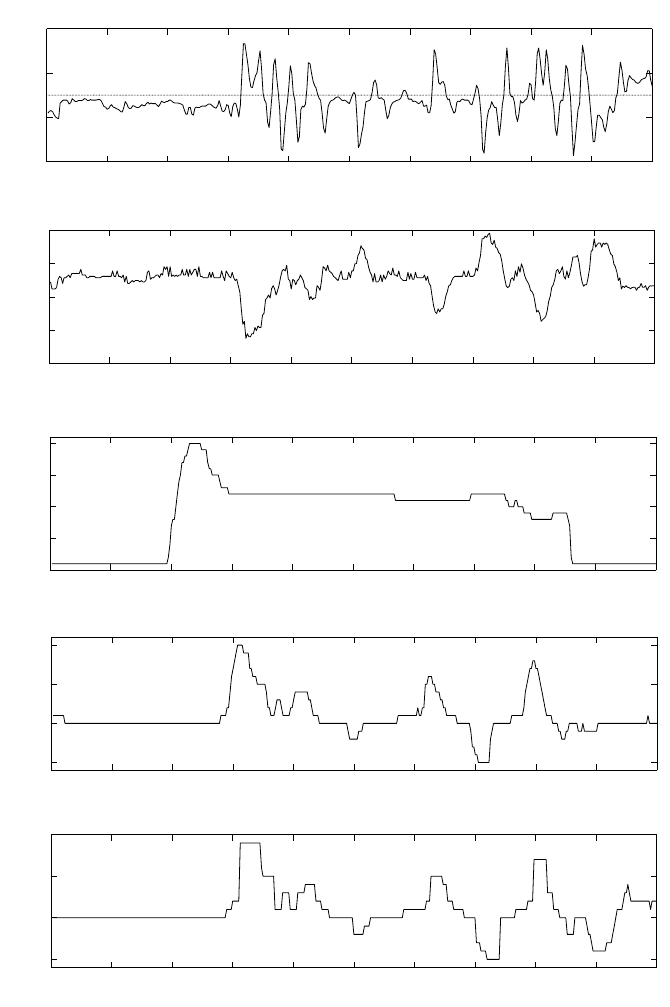
Theexperimental results are showninFigure 6.15and 6.16.
Although
we
aren
ot
concerned
with
wh
ether
ther
ob
ot
can
a
ccurately
trackthe path or not, the overall offset fromthe path is 1.18 ft, whichisan
acceptable value for a60ftlongjourney.Moreover, forthe three trailsinthis
experiment, allthe trajectories of therobot areconverging to the destination
at theend of thepath.FromFigure 6.16, when t ≥ 14 (at thedestination),
the operator didnot commandthe robotanymore, however, the robotcan
balance itself at around 90
o
.Therefore, under ashared controlenvironment,
with the human operator responsible forthe na
vigation tasko
ft
he robo
t,
the robotisable to move fromone location to another location whichare
fara
part, andtobalance itself at
thev
ertical po
sition when the robotstops
moving (with no operator’s command).
6.6Discussions
From theresults we obtained fromthe previous experiments, we verify that our
proposed shared control
algorithm can let
the system ch
oo
se be
twe
en hu
man
operator’s controlcommands or thecommands fromthe autonomousmodule
systematically.W
heneve
rt
he operator hasc
hosena
highlevel
of
autonomy,
the system will execute the command from the the autonomous module unless
the operator hasgiven acommandwhichis’confident’ enough to overcome
thec
onflictb
et
ween the op
erator andthe mac
hine.O
nt
he other hand, if al
ow
degree of autnomyischosen, the system will follow theoperator’s command
unless a’significant’ error/conflict is measured.The proposed shared control
algorithm is able to allow twoentities (human and machine) to exit in the
same system simultaneously.
Although Gyrov
er
do
es
nothav
eanautonomous module to
na
vigate it-
self to travelfromone location to another, this can be done by sharingthe
navigation task with the operator. Under shared control, therobot will main-
tain itslateralbalance when theoperatordoesnot commandit. On the other
hand, under adegree of sharing, the operator is still able to control therobot
to do some specific tasks(straightpath tracking, point-to-pointnavigation,
etc). It is believed that if an autonomous navigation module existsinthe sys-
tem, the operator canshare morenaviagtion controltothe machine using the
6.6
Dis
cussions1
67
START
FINISH
9 ft
51 ft
2 X 2
sq. ft
Fig. 6.10. Experimentonpoint-to-pointnavigationunder shared control.
proposed shared control algorithm, whichcan greatly reducethe dutyofthe
online human operator.
0 5 10 15 20 25 30 35 40 45
4
3
2
1
0
1
2
3
4
distance (ft)
path offset (ft)
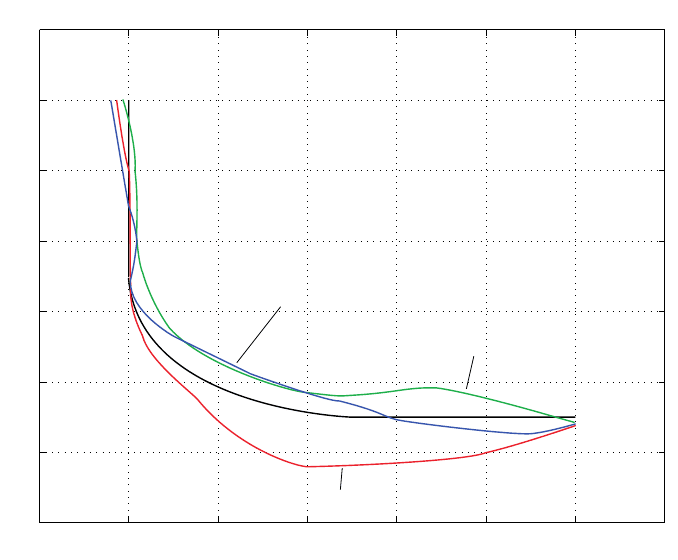
Straight path test
#1
#2
#3
Fig. 6.11. Tr
aj
ectory tra
ve
lled in
thestraightpath test.
1686 Shared Control
6.6
Dis
cussions1
69
0 1 2 3 4 5 6 7 8 9 10
60
80
100
120
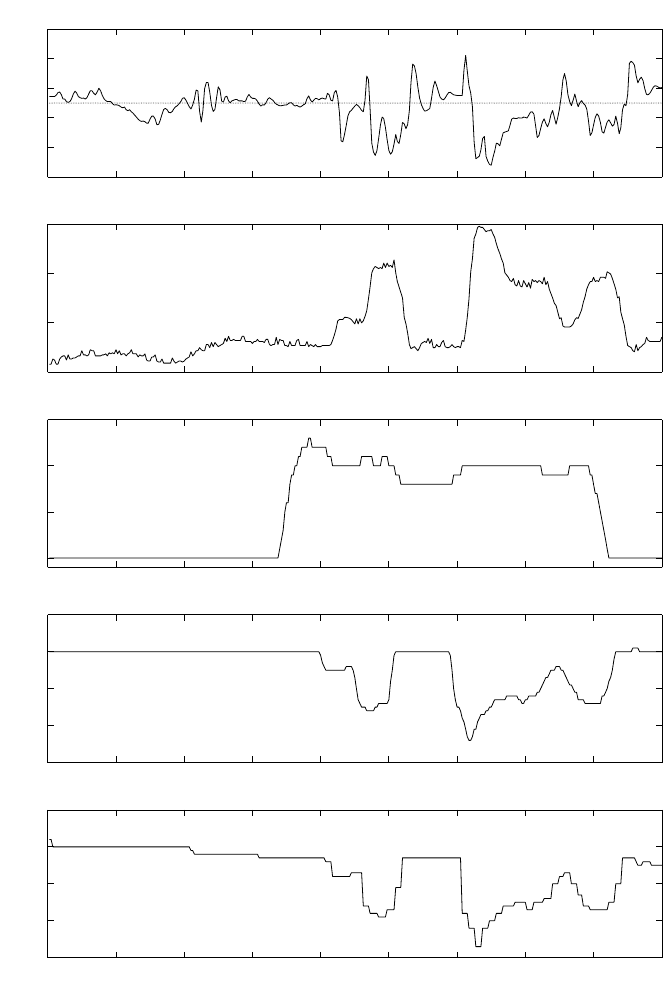
β [deg]
time(sec)
lean angle of Gyrover
0 1 2 3 4 5 6 7 8 9 10
−20
−10
0
10
20
β
a
[deg]
time(sec)
tilt angle of flywheel
0 1 2 3 4 5 6 7 8 9 10
180
185
190
195
200
Drive Command
time(sec)
Drive command (Human)
0 1 2 3 4 5 6 7 8 9 10
175
180
185
190
Tilt Command
time(sec)
Tilt command (Human)
0 1 2 3 4 5 6 7 8 9 10
175
180
185
190
Tilt Command
time(sec)
Tilt command (robot)
Fig. 6.12. Sensor data acquired in the straightpath test.
1706
Shared
Con
trol
0 2 4 6 8 10 12 14
0
2
4
6
8
10
12
14
x (ft)
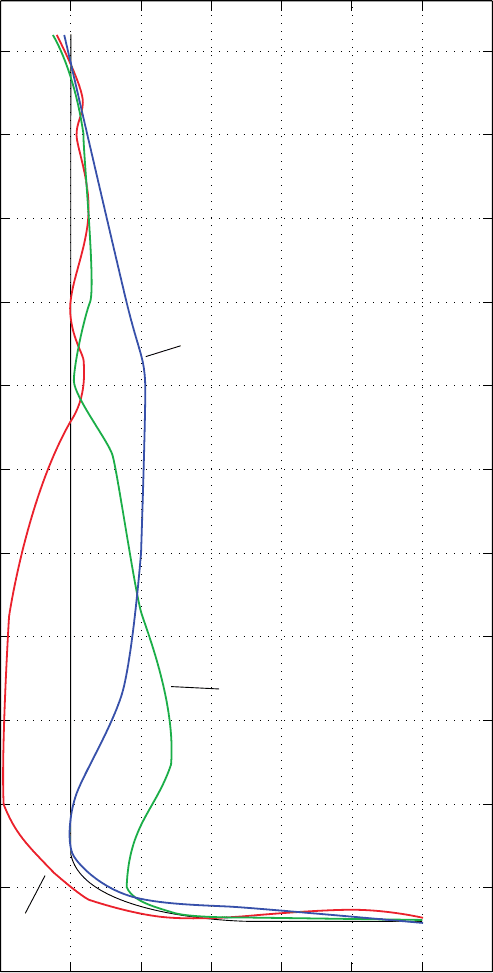
y (ft)
Circular path test
#1
#2
#3
Fig. 6.13. Gyrove
rt
rajectories in
the curved
path test.
6.6
Dis
cussions1
71
0 1 2 3 4 5 6 7 8 9
40
60
80
100
120
140
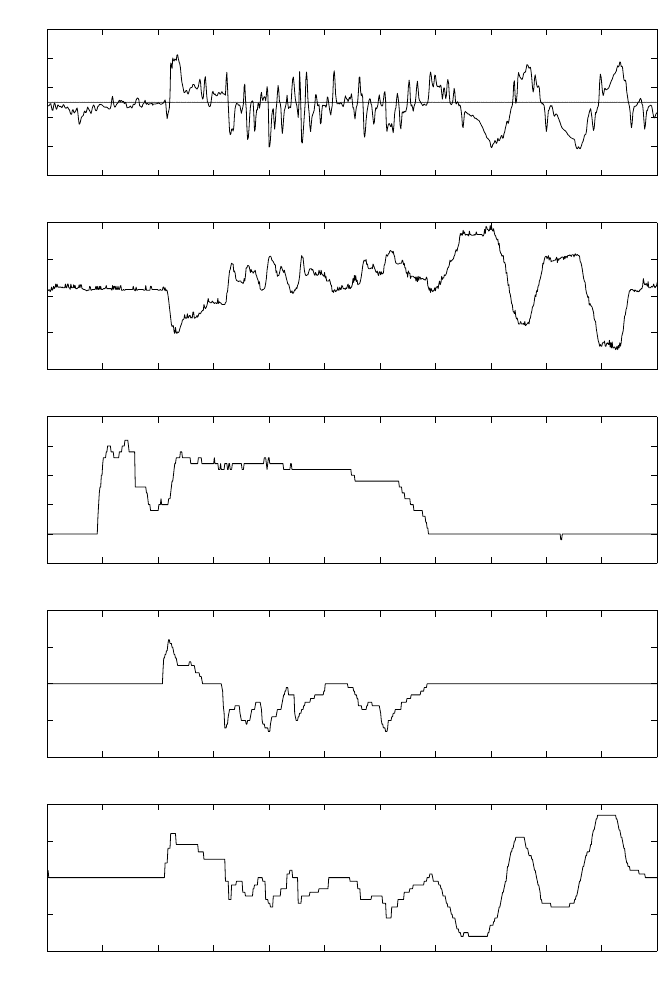
β [deg]
time(sec)
lean angle of Gyrover
0 1 2 3 4 5 6 7 8 9
0
20
40
60
β
a
[deg]
time(sec)
tilt angle of flywheel
0 1 2 3 4 5 6 7 8 9
0
5
10
15
Drive Command
time(sec)
Drive command (Human)
0 1 2 3 4 5 6 7 8 9
−30
−20
−10
0
10
Tilt Command
time(sec)
Tilt command (Human)
0 1 2 3 4 5 6 7 8 9
−30
−20
−10
0
10
Tilt Command
time(sec)
Final tilt command (robot)
Fig. 6.14. Sensor data acquired in the circular path test.
1726
Shared
Con
trol
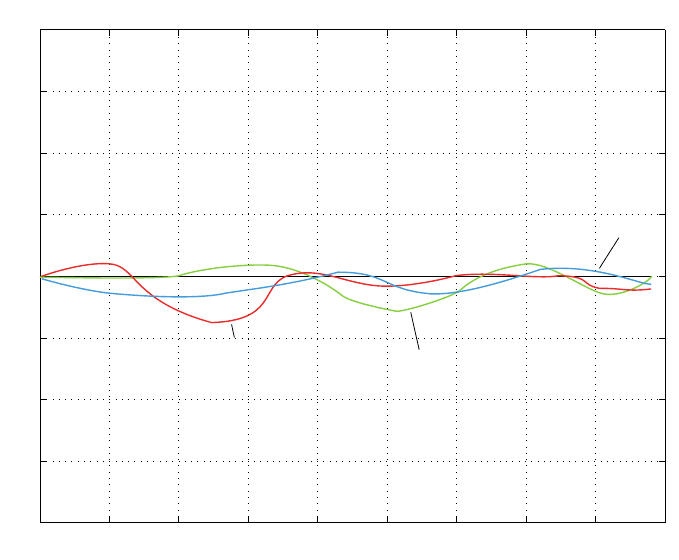
0 2 4 6 8 10 12 14
0
5
10
15
20
25
30
35
40
45
50
55
x (ft)
y (ft)
Combined path test
#3
#2
#1
Fig. 6.15. Gyrovertrajectories in the combined path test.
6.6
Dis
cussions1
73
0 2 4 6 8 10 12 14 16 18 20 22
40
60
80
100
120
140
β [deg]
time(sec)
lean angle of Gyrover
0 2 4 6 8 10 12 14 16 18 20 22
−40
−20
0
20
40
β
a
[deg]
time(sec)
tilt angle of flywheel
0 2 4 6 8 10 12 14 16 18 20 22
−5
0
5
10
15
20
Drive Command
time(sec)
Drive command (Human)
0 2 4 6 8 10 12 14 16 18 20 22
−20
−10
0
10
20
Tilt Command
time(sec)
Tilt command (Human)
0 2 4 6 8 10 12 14 16 18 20 22
−20
−10
0
10
20
Tilt Command
time(sec)
Final tilt command (robot)
Fig. 6.16. Sensor data acquired in the combined path test.

7
Conclusions
7.1 Concluding Remarks
7.1.1 Concept and Implementations
Gyroverisanovelconcept formobilitythathas distinct advantages over
conventional, statically stable ve
hicles. Theconcept hasb
een ve
rifiedw
ith
three working models. Gyroverisparticularly suited foroperationsathigh
speed and roughterrain, andalso showspromise as amarine/amphibious
vehicle.The mechanismcan be completely enclosed, presenting avery clean,
protected enve
lope.
During the past severalyears,wehavemadesignificantadvances in the
technologies fora
gyroscopicallystabilized wheel. We
ha
ve
gained an
un-
derstanding of thebasics of gyro-stabilization,and have demonstrated the
feasibilityofthe Gyroverconcept.
7.1.2 Kinematics and Dynamics
We have developed thekinematic anddynamic models of Gyroverinahorizon-
tal plan.Inderivation of the model, we consider therobot as acombination of
three components: arollingdisk, an internal mechanism andaflywheel. They
are linked by atwo-link manipulator. We simplified the modelbydecoupling
the tilt angle of theflywheel from the dynamics. We verifiedthe model by
experimentand simulation. We demonstratedthatthe dynamics of therobot
is nonholonomicand underactuated. We demonstratedthe dynamics coupling
between the wheel and the flywheel, through the stabilizationand tilting effect
of theflywheel on the robot.
Based on theabove work, we have established thedynamics of arobot
rolling without slipping on an inclined plane. The pendulum swinging motion
is neglected andthe verticaloffset of theactuation mechanism from the axis
of the whole wheel is reduced from the dynamics. If we let
l
1
, l
2
and θ be zero,
thedynamics areexactly the same as Gyroveronahorizontal plan.
Y. Xu and Y. Ou: Control of Single Wheel Robots, STAR 20, pp. 175–177, 2005.
© Springer-Verlag Berlin Heidelberg 2005