Yangsheng Xu, Yongsheng Ou. Control of Single Wheel Robots
Подождите немного. Документ загружается.

1345
Fu
rther
To
pics
on
Learning-based
Con
trol
0 200 400
−40
−20
0
20
β
a
[deg]
time(sec)
0 200 400
40
60
80
100
120
β [deg]
time(sec)
0 200 400
−4
−2
0
2
dba (deg/sec)
time(sec)
0 200 400
−200
−100
0
100
db [deg/sec]
time(sec)
0 200 400
−100
−50
0
50
da [deg/sec]
time(sec)
0 200 400
175
180
185
190
195
Tilt Command U
1
time(sec)
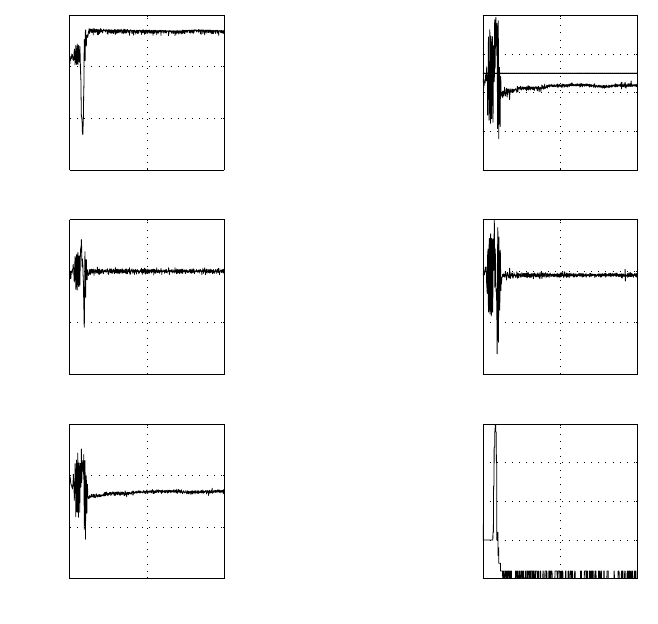
Fig. 5.3. SVMlearning control results.
Discussions and Remarks
Themost critical andtime-consuming part is the data selection andregroup-
ing. The data selection conditions need to be well controlled andparameters
needtobecarefullyselected.
If some of thesensor readings aretoo noisy to produce thedata selec-
tion andc
ollection,w
emay
usesmoothing tec
hnologies. Thereare man
ya
p-
proaches in digital signal processing.Animportantpractical pointthatneeds
to be kept in mind is thatthe state variablesinlearninghumancontrol are
usuallyverylow frequency signals.
As described in the significance analysis section, if thereare only limited
groups, andtheir(X
T
X)
− 1
do notexist, then remove these groups. If all
groups displaythe problemand it is because thereexist two or morevariables
with strong linear relations, remove oneorsome of them to avoid thelinear
relation andperform the significance analysis again.

5.2
Imp
lemen
tationo
fL
earning
Con
trol
135
Moreover, theinput variables X maymiss some importantvariables
and/oradd some almost irrelevantvariables. We do notconsider themissing
problemhere, as mentioned in the introduction section: i.e., we assume that
we
ha
ve
alreadyi
ncluded
al
lt
he
imp
ortan
tf
actors.
F
or
th
el
atter
pro
blems,
we
divide
X in
to
two
pa
rts:
X =(
´
X
1
:
´
X
2
) ,
where X ∈ R
m
,
´
X
1
∈ R
m
1
,
´
X
2
∈ R
m
2
and m = m
1
+ m
2
and
´
X
2
is not
relevantto Y .
Nowsuppose that thetrue model forEquation(5.15) becomes
δY =
¯
β
1
δX
1
+
, (5.29)
but instead we fit
δY =
¯
β
1
δX
1
+
¯
β
2
δX
2
+
, (5.30)
to thedata, where
¯
β
1
∈ R
m
1
and
¯
β
2
∈ R
m
2
.W
er
efer to Equation(
5.29) and
Equation (5.30) as thereduced and fullmodels respectively.Let
ˆ
¯
β
1 F
and
ˆ
¯
β
2 F
be
the least
squares estimates of
¯
β
1
and
¯
β
2
in fittingmodel (5.30)tothe data.
Let
ˆ
¯
β
1 R
denote the least squares estimateswhen model(5.29) is fitted to the
data.F
rom[
90], we
have
the following two
conclusions:
1.
ˆ
¯
β
1 F
and
ˆ
¯
β
2 F
areu
nb
iased estimates of
¯
β
1
and
¯
β
2
,r
espectively.Thatis,
E (
ˆ
¯
β
1 F
)=
¯
β
1
and E (
ˆ
¯
β
2 F
)=0.
2. E (
ˆ
¯σ
2
F
)=σ
2
.
This means in the latter case that it is still an ideal estimate forthe sensitivity
coefficient
∂Y
∂x
i
.
Howt
oc
hoose features is
another impo
rtant
aspect that will affect the
learningaccuracy.Thus, in the next chapter, we willhandle this problem.
5.2 Implementation of LearningControl
In this chapter, we showthe implementation results of the CNN models
trained in theprevious chapter. First of all, we validate the CNN models
we obtained by applying aHidden Markov Modelbasedsimilaritymeasure.
Next, forthe experimental implementationsofthe CNN models, we evaluate
theperformance of these models by observingthe lean angleofthe robotand
the overall control on theflywheel. Later, we combinedthe two motionsinto
asingle motion. This combinedmotion ensures that therobot can be fully
recovered fromthe fall position backand balancedatits uprightposition.
1365
Fu
rther
To
pics
on
Learning-based
Con
trol
5.2.1Validation
In this subsection, we will evaluate eachofthe modelgenerated by thecas-
cade learningalgorithmfor differentbehaviors of the robot, includinglateral
stabilizationand tiltup motion.Weapply thesimilaritymeasure mentioned
in Section 3.2.4toquantify the level of similaritybetween the originalhuman
con
trol
da
ta
an
dt
he
mo
de
l-generated
tra
je
ctories
thr
ough
sim
ul
ations.
Since
we
do
noth
av
eap
hy
sical
mo
de
lf
or
th
esek
ind
of
motionf
or
Gy
ro
ve
r,
ou
r
simulationsare done by feeding thecurrentand history state variablesand
control informationintothe cascadeneural network, to seeifitcan generate
similar control output in each time instant.
Basically,wehavetwo motions to learn: (1)Lateralbalancing ( i =1), and
(2) Tiltup ( i =2). Foreachmotion,wegivethree different set of data forthe
simulation.For notation convenience,let X
i,j
, i ∈{1 , 2 } , j ∈{1 , 2 , 3 } ,denote
therun of different motions i in trail # j .
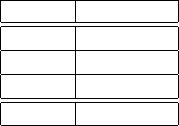
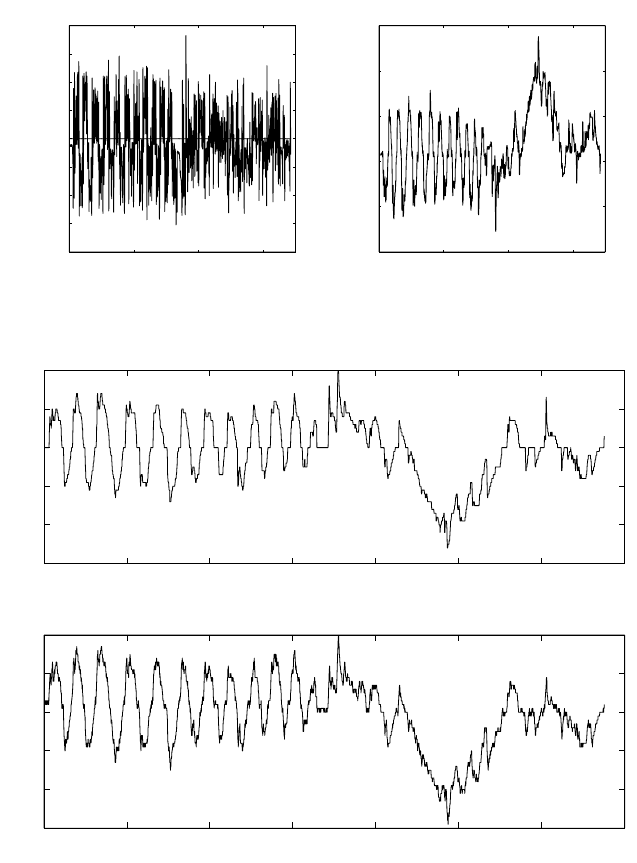
VerticalBalancing
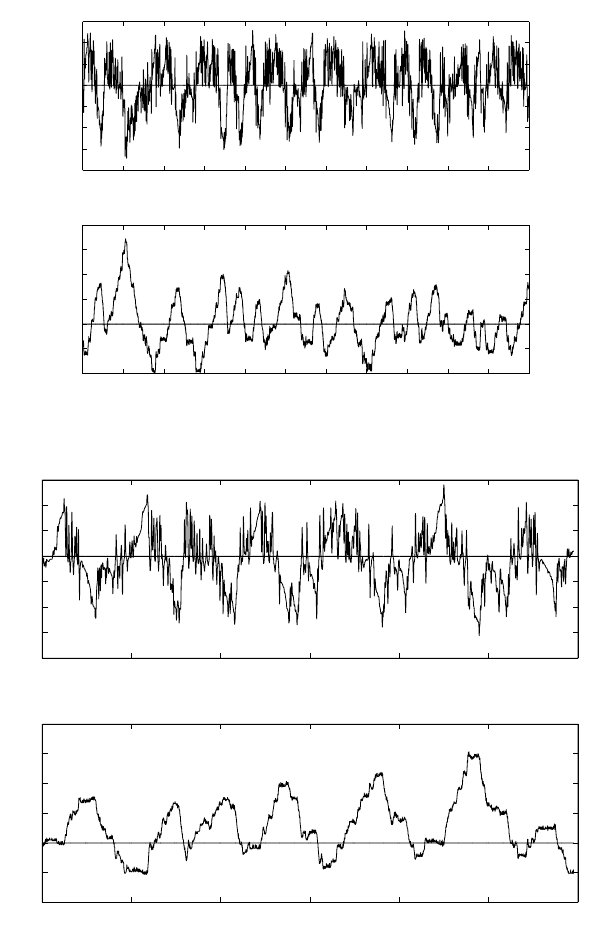
Figure 5.4,5.6 and5.8 show three different verticalbalancedmotion by hu-
man control. Thegraph on theleft of eachfigure is theplot of leanangle
data ( β ), while the rightone plots the orientations of
theflywheel (
β
a
). The
correspondingh
uman con
trol data andC
NN model controldata for
X
(1, 1)
,
X
(1, 2)
and X
(1, 3)
areshown in Figure 5.5, 5.7 and5.9 respectively.Weperform
the similaritymeasure between the human control andCNN modelcontrol
trajectories foreachmotion,t
he resultsa
re summarized in Ta
ble 5.9. From
theperformance of this verticalbalancing CNN model,wecan observethat
the modelcan generate similarcontrol trajectories as human operator, with
an average similarityvalue of 0.5940.
similarity σ
X
(1, 1)
0.5885
X
(1, 2)
0.6235
X
(1, 3)
0.5700
average 0.5940
Table 5.9. Similaritymeasures for vertical balanced control between human and
CNN model
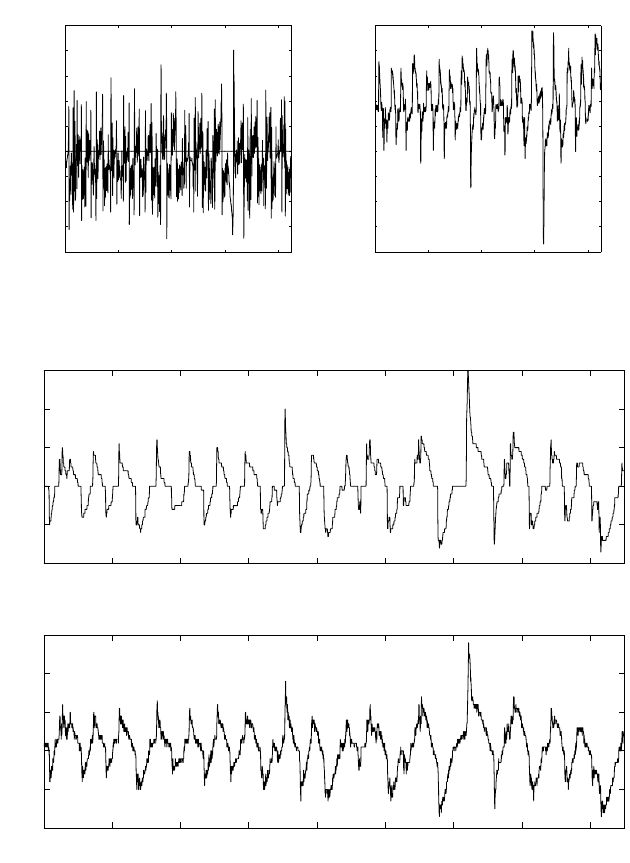
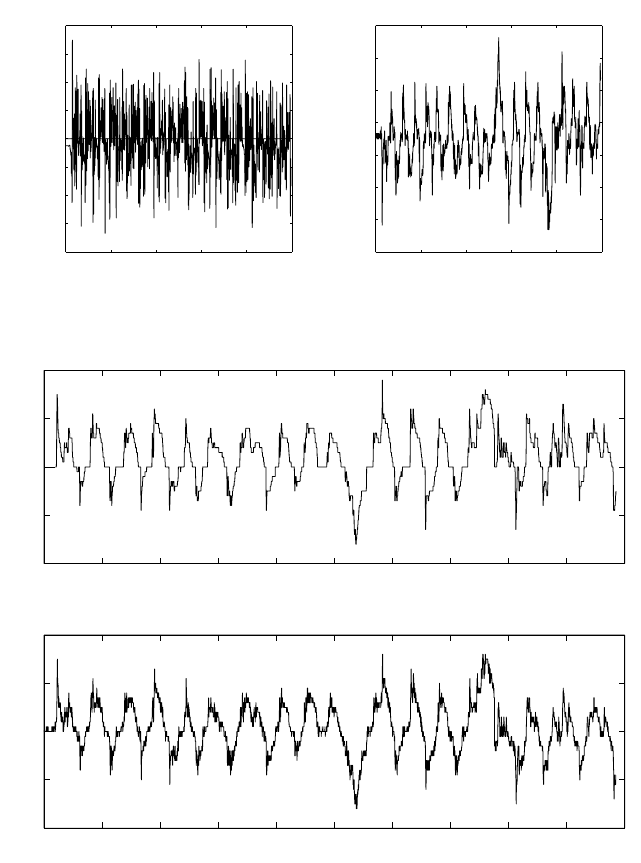
Tilt-up Motion
Figure 5.10, 5.12and 5.14 showthree different tiltup motionbyhuman con-
trol. The correspondinghuman control data andCNN model controldata for
X
(2, 1)
, X
(2, 2)
and X
(2, 3)
areshown in Figure 5.11, 5.13 and5.15 respectively.
5.2
Imp
lemen
tationo
fL
earning
Con
trol
137
0 20 40 60 80
−50
−40
−30
−20
−10
0
10
20
30
40
β
a
[deg]
time(sec)
tilt angle of flywheel
0 20 40 60 80
50
60
70
80
90
100
110
120
130
140
β [deg]
time(sec)
lean angle of Gyrover
Fig. 5.4. Vertical balanced motion by human control, X
(1, 1)
.
0 10 20 30 40 50 60 70 80
160
170
180
190
200
210
time
Tilt command
CNN model control trajectory
0 10 20 30 40 50 60 70 80
160
170
180
190
200
210
time
Tilt command
Human control trajectory
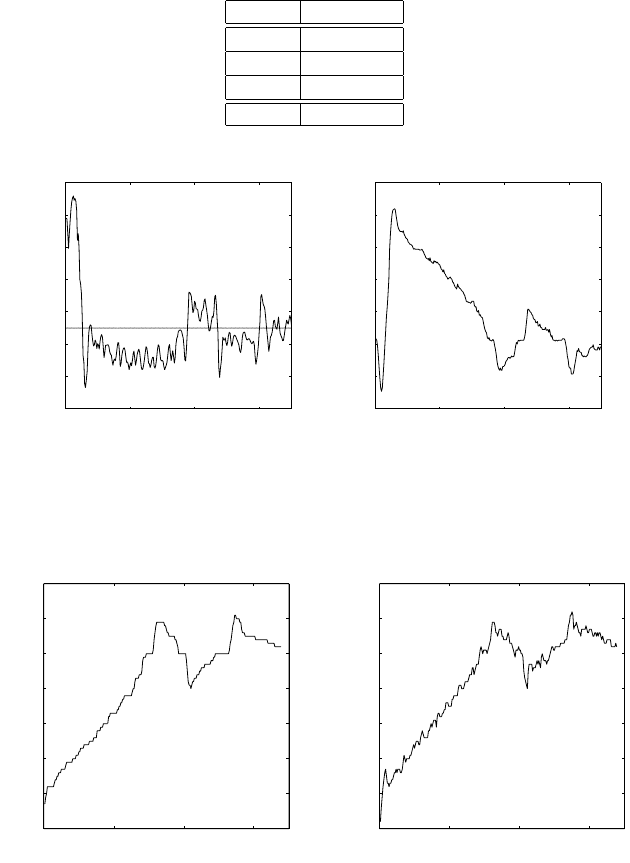
Fig. 5.5. Control trajectories comparison for X
(1, 1)
.
Again, we perform thesimilaritymeasure between the human control and
CNN modelcontrol trajectories foreachmotion,the results aresummarized
in Table 5.10. The CNN model canalso generate similar controltrajectories
as human operator,with an average similarityvalue of 0.7437.
1385
Fu
rther
To
pics
on
Learning-based
Con
trol
0 20 40 60 80 100
−30
−20
−10
0
10
20
30
40
β
a
[deg]
time(sec)
tilt angle of flywheel
0 20 40 60 80 100
50
60
70
80
90
100
110
120
130
β [deg]
time(sec)
lean angle of Gyrover
Fig. 5.6. Vertical balanced motion by human control, X
(1, 2)
.
0 10 20 30 40 50 60 70 80 90 100
160
170
180
190
200
time
Tilt command
CNN model control trajectory
0 10 20 30 40 50 60 70 80 90 100
160
170
180
190
200
time
Tilt command
Human control trajectory
Fig. 5.7. Control trajectories comparison for X
(1, 2)
.
Discussions
The simulations we have done in fact is the first step to validate the CNN
models we obtained. By using the HMMsimilaritymeasure, we compare the
human controltrajectory with thecontrol trajectory generate fromthe CNN
model of aparticular motion.Ifthe similaritymeasure givesusarelatively
5.2
Imp
lemen
tationo
fL
earning
Con
trol
139
0 20 40 60
−40
−20
0
20
40
60
β
a
[deg]
time(sec)
tilt angle of flywheel
0 20 40 60
50
60
70
80
90
100
110
120
130
β [deg]
time(sec)
lean angle of Gyrover
Fig. 5.8. Vertical balanced motion by human control, X
(1, 3)
.
0 10 20 30 40 50 60 70
150
160
170
180
190
200
time
Tilt command
CNN model control trajectory
0 10 20 30 40 50 60 70
150
160
170
180
190
200
time
Tilt command
Human control trajectory
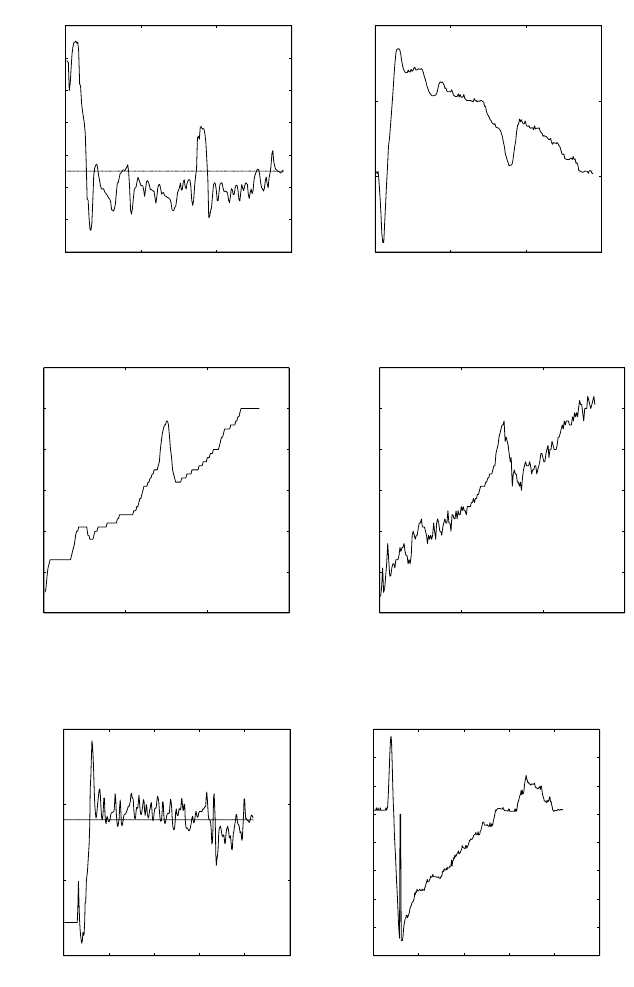
Fig. 5.9. Control trajectories comparison for X
(1, 3)
.
high similarity value ( σ ≥ 0 5), which implies the particular CNN model
.
can produce ’similar’ control output as human control. From the simulation
results of the lateral balancing and tiltup motion, we can verify that the CNN
models for both motions are able to model the human control strategy. Later
on, in the next chapter, we will further verify the models by experimental
implementation.
1405
Fu
rther
To
pics
on
Learning-based
Con
trol
similarit
y
σ
X
(2, 1)
0.7896
X
(2, 2)
0.7030
X
(2, 3)
0.7386
av
er
ag
e
0.7437
Ta
ble
5.10.
Similarity
measures
for
tiltup
con
trol
be
twe
en
hu
man
and
CNN
mo
del
0 2 4 6
−40
−20
0
20
40
60
80
100
β
a
[deg]
time(sec)
tilt angle of flywheel
0 2 4 6
40
60
80
100
120
140
160
180
β [deg]
time(sec)
lean angle of Gyrover
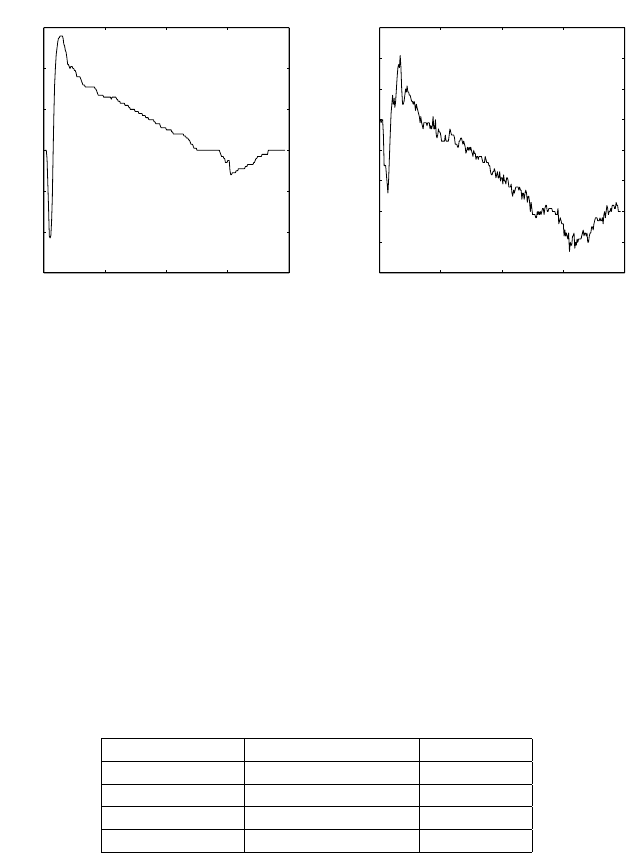
Fig. 5.10. Tiltup motion by human control, X
(2, 1)
.
0 2 4 6
130
140
150
160
170
180
190
200
time
Tilt command
CNN model control trajectory
0 2 4 6
130
140
150
160
170
180
190
200
time
Tilt command
Human control trajectory
Fig. 5.11. Control trajectories comparison for X
(2, 1)
.
5.2
Imp
lemen
tationo
fL
earning
Con
trol
141
0 2 4 6
−50
0
50
100
β
a
[deg]
time(sec)
tilt angle of flywheel
0 2 4 6
40
60
80
100
120
140
160
180
β [deg]
time(sec)
lean angle of Gyrover
Fig. 5.12. Tiltup motion by human control, X
(2, 2)
.
0 2 4 6
130
140
150
160
170
180
190
time
Tilt command
CNN model control trajectory
0 2 4 6
130
140
150
160
170
180
190
time
Tilt command
Human control trajectory
Fig. 5.13. Control
tra
jectories comparison for
X
(2, 2)
.
0 2 4 6 8 10
−100
−80
−60
−40
−20
0
20
40
60
β
a
[deg]
time(sec)
tilt angle of flywheel
0 2 4 6 8 10
0
50
100
150
β [deg]
time(sec)
lean angle of Gyrover
Fig. 5.14. Tiltup motion by human control, X
(2, 3)
.
1425
Fu
rther
To
pics
on
Learning-based
Con
trol
0 2 4 6 8
160
170
180
190
200
210
220
230
240
time
Tilt command
CNN model control trajectory
0 2 4 6 8
120
140
160
180
200
220
240
time
Tilt command
Human control trajectory
Fig. 5.15. Control trajectories comparison for X
(2, 3)
.
5.2.2 Implementation
VerticalBalanced Motion
An
umbe
ro
fe
xperiments have
been conducted to
verify theCNN mo
del
forvertical balancing, Figure5.16,5.17 and 5.18 shows the implementation
results. The human control strategyinbalancing the robotatthe vertical
po
sition is given
in
Figure5
.19.Asmentioned in
the
pe
rviousc
hapter, we
evaluate the performance by the lean angleofthe robotand thedegree of
freedomremains forthe flywheel. We
summarized
the ov
erall pe
rformance of
both CNN modeland human operator for the verticalstabilized motionin
Table 5.11.
average lean angle
¯
β DOF
flywheel
CNN control#1 90. 24
o
0 . 9944
CNN control #2 88. 11
o
0 . 8756
CNN control #3 87. 57
o
0 . 8867
Human control 89. 41
o
0 . 9600
Table 5.11. Performance measures for vertical balancing.
When compared with human control, theCNN modelweobtainedfor
verticalbalancing behavesverysimilar to human. Forthe 3differenttrails,
the CNN model notonly able to stablize therobot at around 90
o
,but also
reserved ahigh level of degree of freedom for the internal flywheel to oppose
anymotion that appearstomakethe robottofall down.
5.2
Imp
lemen
tationo
fL
earning
Con
trol
143
0 10 20 30 40 50 60 70 80 90 100 110
50
60
70
80
90
100
110
120
β [deg]
time(sec)
lean angle of Gyrover
0 10 20 30 40 50 60 70 80 90 100 110
−40
−20
0
20
40
60
80
β
a
[deg]
time(sec)
tilt angle of flywheel
Fig. 5.16. Ve
rtical balancing by
CNN mo
del,
trail
#1.
0 10 20 30 40 50 60
50
60
70
80
90
100
110
120
β [deg]
time(sec)
lean angle of Gyrover
0 10 20 30 40 50 60
−40
−20
0
20
40
60
80
β
a
[deg]
time(sec)
tilt angle of flywheel
Fig. 5.17. Vertical balancing by CNN model, trail #2.
Tilt-up Motion
Next, we implementanotherCNN model whichistrainedbyhumantiltup
motiondata, theresults areshown in Figure 5.20 and5.21 for CNN model