Yangsheng Xu, Yongsheng Ou. Control of Single Wheel Robots
Подождите немного. Документ загружается.

1445
Fu
rther
To
pics
on
Learning-based
Con
trol
0 10 20 30 40 50 60 70
40
60
80
100
120
140
β [deg]
time(sec)
lean angle of Gyrover
0 10 20 30 40 50 60 70
−60
−40
−20
0
20
40
60
β
a
[deg]
time(sec)
tilt angle of flywheel
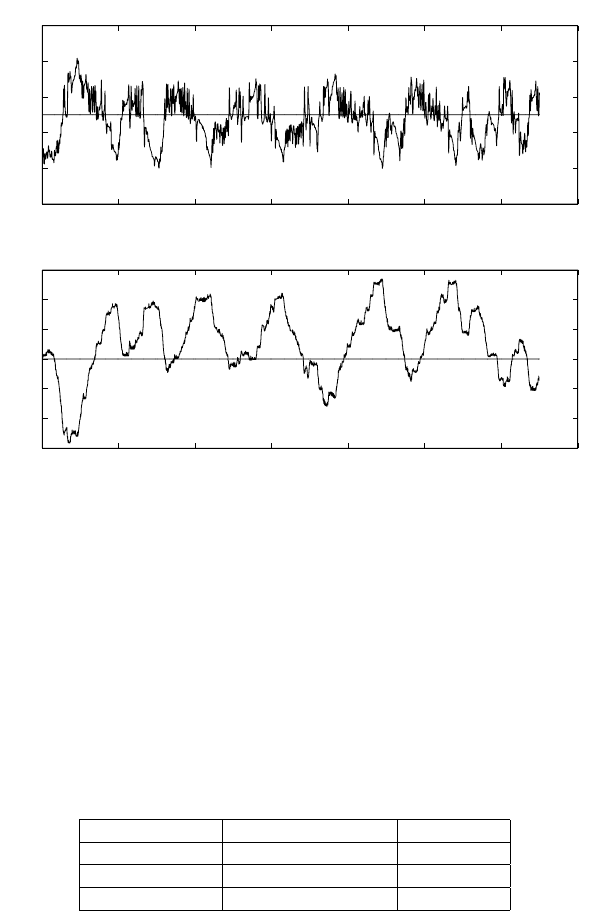
Fig. 5.18. Ve
rtical balancing by
CNN mo
del,
trail
#3.
ave
rage lean angle
¯
βDOFDOF
flywheel
CNN control#19
7260677497..26
o
0 . 6774
CNN control #2 95 60 0403995..60
o
0 . 4039
Human control 87 31 0737287..31
o
0 . 7372
Table 5.12. Performance measures for tiltup motion.
control, while the human control is shown in Figure 5.22. The performance of
these motions are summarized in Table 5.12.
Since a large portion of the flywheel’s motion is contributed to tiltup the
robot, the overall degree of freedom of the flywheel in tiltup motion is much
lower than that of lateral stabilization. For the CNN model control in Figure
5.20 and 5.21, the robot is lying on the ground initially, with β
o
≈ 150 , after
, after
a few seconds, the model tiltup the robot and brings the robot back to the
upright position.
5.2
Imp
lemen
tationo
fL
earning
Con
trol
145
0 10 20 30 40 50 60 70
40
60
80
100
120
140
β [deg]
time(sec)
lean angle of Gyrover
0 10 20 30 40 50 60 70
−30
−20
−10
0
10
20
30
40
β
a
[deg]
time(sec)
tilt angle of flywheel
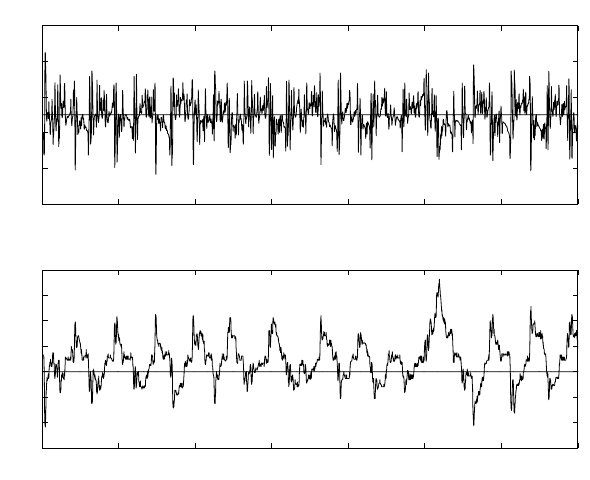
Fig. 5.19. Ve
rtical balancing by
hu
man op
erator.
Combined Motion
We observed thatthe CNN modelsfor lateral balancing andtiltup motionare
subjected to some initial condition, the
problem canb
esolved by
combining
the two motions to form asingle motion.
Consider thecase that therobot is in thefall position, that is, with β ≈
150. In Figure 5.20 and5
.21,although the CNN
tiltup model is
able to
keep
the robottostayaround at 90
o
foracertain moment, the robot will fall back
to the ground eventuallyb
ecause the
flywheel has reachedanill-condition
( β
a
= ± 90
o
). Moreover, thetiltup model is unable to let the robottoconverge
to 90
o
sometimes, whichcausesalarge fluctuation in thelean angle about90
o
,
Figure 5.24.
To dealwith this problem, we combine thetiltup motiontogether with
the lateralbalancedmotion,Figure 5.23. Sincethe CNNmodel is unable to
keep the robotatthe verticalposition,afterthe robothas tiltup, we ask the
model to balance the robotat90
o
.
The experimental result forthe whole tiltupand stabilization process after
thecombination is showninTable 5.13 andFigure 5.25. Initially,the robotis
in afall position, by executingthe tiltupcontrol of theCNN model, the robot
is recovered to thevertical position. Afterwards, the lateralstabilization is
controlled by another model whichspecifically trained forkeepingthe robot
into the verticalposition.Fromthe results, thecombinedmotion can keep
1465
Fu
rther
To
pics
on
Learning-based
Con
trol
0 5 10 15
40
60
80
100
120
140
160
180
β [deg]
time(sec)
lean angle of Gyrover
0 5 10 15
−20
0
20
40
60
80
100
β
a
[deg]
time(sec)
tilt angle of flywheel
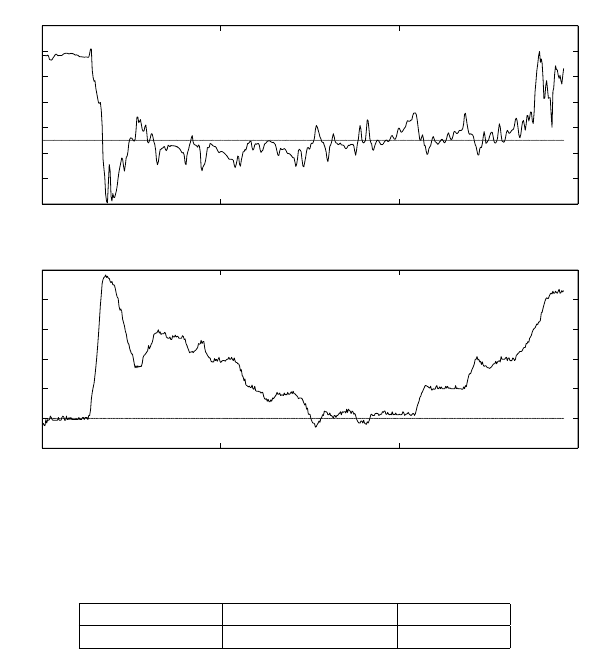
Fig. 5.20. Tiltup motion by
CNN mo
del,
trail
#1.
average lean angle
¯
β DOF
flywheel
CNN control#1 88. 40
o
0 . 8998
Table 5.13. Performance measures for combined motion.
5.2.3Discussions
In this chapter, the CNN modelsfor lateral balancing andtiltup motionare
being verifiedbyexperimentalimplementations. By combining thetwo mo-
tionsintoasingle motion, the robot is able to recoverfromthe fall position,
and thentoremain stable at thevertical position after tiltup.Therefore,we
have completed the low-level behavior module within thebehavior-based ar-
chitectureshown in Figure 6.4. With this module completed,weare goingto
develop asemi-autonomous controlfor Gyroverinthe nextchapter.
the robotatthe verticalposition well after tiltup from the ground foramuch
more longer periodoftime.
5.2
Imp
lemen
tationo
fL
earning
Con
trol
147
0 5 10 15 20 25
0
50
100
150
200
β [deg]
time(sec)
lean angle of Gyrover
0 5 10 15 20 25
−20
0
20
40
60
80
100
β
a
[deg]
time(sec)
tilt angle of flywheel
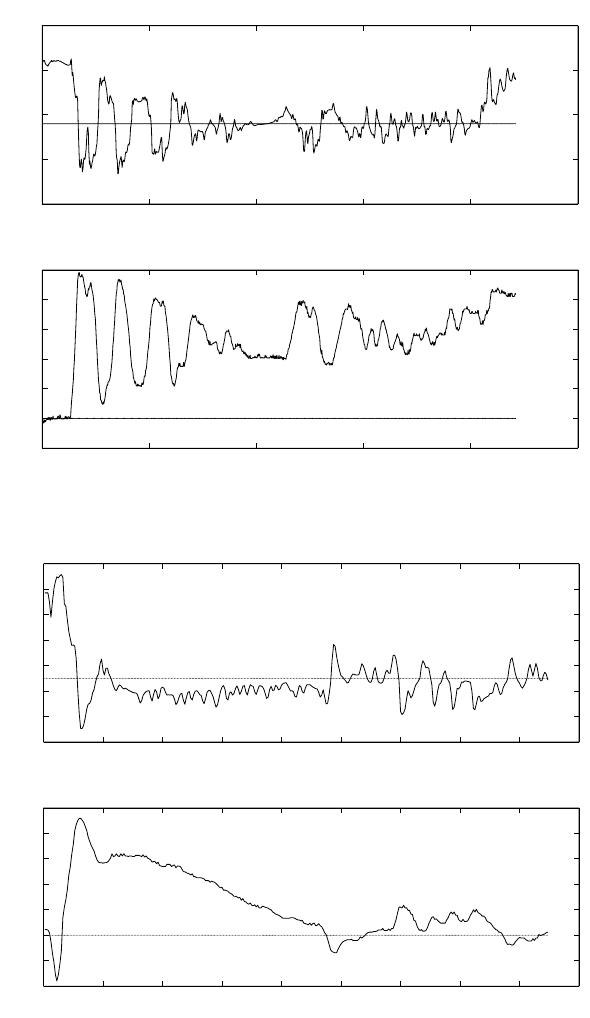
Fig. 5.21. Tiltup motion by
CNN mo
del,
trail
#2.
0 1 2 3 4 5 6 7 8 9
40
60
80
100
120
140
160
180
β [deg]
time(sec)
lean angle of Gyrover
0 1 2 3 4 5 6 7 8 9
−40
−20
0
20
40
60
80
100
β
a
[deg]
time(sec)
tilt angle of flywheel
Fig. 5.22. Tiltup motion by human operator.
1485
Fu
rther
To
pics
on
Learning-based
Con
trol
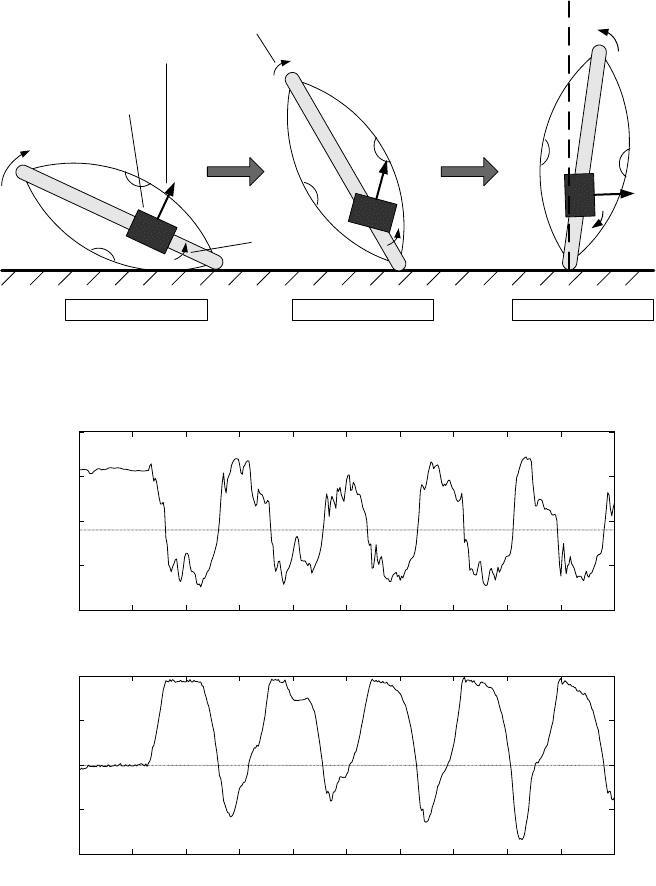
Verticle position
Lateral stabilizationTilting-upInitial status
REAR VIEW OF GYROVER
flywheel
spinning axis of flywheel
motion of
flywheel
motion of robot
Fig. 5.23. Combined
motion.
0 1 2 3 4 5 6 7 8 9 10
0
50
100
150
200
β [deg]
time(sec)
lean angle of Gyrover
0 1 2 3 4 5 6 7 8 9 10
−100
−50
0
50
100
β
a
[deg]
time(sec)
tilt angle of flywheel
Fig. 5.24. Fluctuation in the lean angle made by the tiltup model.
5.2
Imp
lemen
tationo
fL
earning
Con
trol
149
0 10 20 30 40 50 60 70 80 90 100
40
60
80
100
120
140
160
180
β [deg]
time(sec)
lean angle of Gyrover
0 10 20 30 40 50 60 70 80 90 100
−50
0
50
100
β
a
[deg]
time(sec)
tilt angle of flywheel
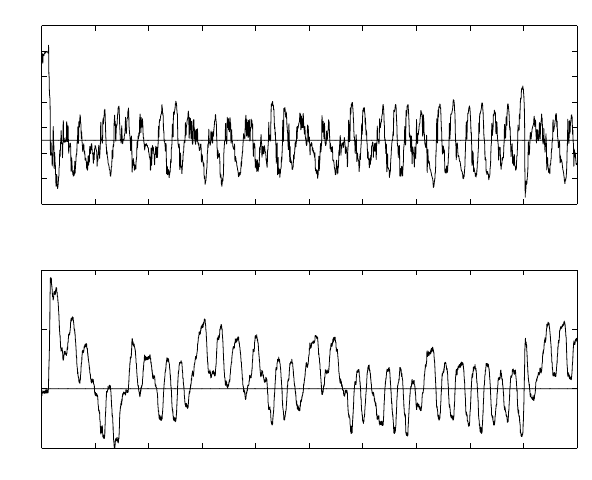
Fig. 5.25. Tiltup and ve
rtical balanced motion by
CNN mo
dels.

6
Shared Control
Basedonthe successful implementationsofthe lateralbalancing andtiltup
motion, in this chapter, we aregoingtodevelopashared control framework
forG
yrover. In
fact,any
situationofa
system usings
haredc
ontrol will
in-
volvehumaninteractions. Under shared control, thehuman operator actsas
as
upervisor foro
verall con
trol, while ther
obot itself can handle some
lo
cal
motionswhichinturn assistthe human. In order to distribute thecontrol
tasks systematically,wedevelop an expression to makesuchadecision. Ex-
perimental resultswill be given in order to verify ouridea.
6.1 Control Diagram
In fact, shared
controlhappens in
man
yd
ailyexamples, esp
ecially for human-
animalinteractions. First of all, let’s consider the horse riding case [103], it
is afairly good example of asemi-autonomous system, or morespecifically,a
shared control system.
Fo
rt
he horse whichisb
eingr
idden by
ah
uman,itisusually able to take
care of all low-level tasks suchascoordination of legmotion,stability, local
obstacle av
oidance andprovide enough po
werand sp
eedfor differenta
ctions.
On the other hand, the riderprovides global planning,interacts with the horse
to arriveatdifferentlocationsand achieve various goals.Atthe same time,
therider can override anyhorse behavior by pulling thereins or hitting on
the horse’s body if necessary.Throughout thejourney,the riderrelies on the
horse motoric abilitiesand the horse’s behaviorsbecome more intelligentby
receiving the rider’s commands. Theinteraction between the two individuals
happens in anaturaland simpleway.
Another example we want to illustrate is to ask aroboticarm to handle
acup of tea[120]. Thewhole task canbedecomposed into two subtasks:
(i) to handlethe cup of tea safelywithout pouring the tea (localbalancing),
and(ii) to reachthe desiredlocation (global navigation). In ateleoperated
environment, it maybedifficult for ahuman operator to perform both tasks
Y. Xu and Y. Ou: Control of Single Wheel Robots, STAR 20, pp. 151–173, 2005.
© Springer-Verlag Berlin Heidelberg 2005
1526
Shared
Con
trol
simultaneously,oritcould be mentally taxing.However, if an autonomous
module is introducedfor thelocal stabilityofthe cup, the operator in the
control loop is only responsible for the navigation task, whichgreatlyreduces
theb
urden
fo
rt
he
op
er
ators.
Mo
reov
er
,i
ti
sc
lear
that
the
pe
rformance
of
the
system
wo
uld
be
mu
ch
be
tter
an
ds
table
than
b
ein
gc
on
trolled
by
as
ingle
en
tit
y(
hu
man/mach
ine).
Gyroverisacomplex system not only in terms of the difficulties in deriving
its mathematicalmodel, butalso in terms of its controlbyhumanoperator.
The robot can be controlled manuallythrougharadio transmitter with two
independentjoysticks, one of them is assigned to control the drivemotor,
while the other oneisassigned to control the tilt motor. Similar to abicycle,
Gyroverisasingle trackvehicle whichisinherently unstable in its lateraldi-
rection.
Therefore,
differen
tf
romc
on
tr
ollinga
quasi-static
mobile
rob
ot
,t
he
human operator notonly handlesthe global navigation forthe robot, but also
needs to payattentiontogovern the lean angle of therobot simultaneously.
Moreover, thehighly couplingeffect between the wheel and the internal fly-
wheel also complicates the controlofGyrove
r. To
this end,for suc
ha
complex
system, instead of creatingfullyautonomous control, it is much more practical
to developacontrol methodwhichcan “share” theworkload of thehuman
operator.
Recently,shared controlhas been widely applied into many robotics man-
machine systems, from health care [10,103, 26,
2, 97, 20]
to telerobo
tics
[121, 64, 39, 120, 29].For rehabilitation applications, atypical example is
robotic wheelchairs. Although the wheelchair itself canprovide alevel of au-
tonomyfor theusers, it is still desirable that
the
user can augmentthe con-
trol by the on-board joystickinsome specialsituations (e.g.docking, passing
through adoorway). Atelerobotic system usually consists of ahumanoper-
ator ands
everal autonomous controllers.
Ah
uman op
erator usually interacts
with the system in differentways. One of theimportantissues is to develop
an efficientm
ethodt
oc
ombine ah
umanand mac
hine intelligences so thatthe
telerobotic system can perform taskswhichcannotbedonebyeither ahu-
man or autonomous controller alone[39]. In these shared controlsystems, the
autonomous modules exist in the system to assist the human operator during
navigation,inorder to relievethe stressofthe operatorsinacomplex system.
Usually,t
he hu
man op
erator is
responsible for some
high-level
con
trol (e.g.
global navigation), whilethe machine performs low-levelcontrol (e.g. local
obstacleavoidance).
In fact,the two behaviorswehavementioned in the previous chapters, (i)
Lateral balancing and (ii) Tiltup motion, aredesigned to tackle the robot’s
instabilityprobleminthe lateral direction. Sincewehavesuccessfully modeled
andimplemented the two behaviorsbyamachine learningapproachand ver-
ified them in experiments, the next step is to incorporatethesemotionswith
human controlinorder to develop asharedcontrol framework forGyrover.
We preferusing ashared controlscheme rather than afullyautonomous one
because of thefollowing reasons:
6.2
Sc
he
mes1
53
• Sophisticateddynamic system. As mentioned before, it is difficultfor
us to obtainacomplete mathematical modeltogovernthe motionsof
Gyrover, due to itscomplicated dynamicand nonholonomicnature. This
mak
es
us
en
coun
ter
man
yd
ifficulties
in
dev
elo
pinga
ful
ly
autonomous
system
for
Gy
ro
ve
ra
tt
his
stage.
• Hardware limitations. Due to the special physical structureofGy-
rover, the currentprototype of Gyroverweare using stilldoesnot have
anynavigation devices equippedon-board(e.g. vision), whichmakes it
impossible forthe robottonavigate itself.
• Importance of human operators. Practically, some complicated tasks,
whichmay be trivial forhumans, areoftennot performedwell by robots.
Therefore, ahumanoperatorisessentialtoexist in the controlloopin
order to monitor andoperate the executive system.
• Time and cost. Building afullyautonomous system which provides safe
and robust performance would be time consumingand costly,interms of
computations and resources. In contrast,itisfar morepractical andmuch
ch
eaper
to
develop as
emi-autonomous system.
• Accuracy vs Reliablilty. Machines are excellentinperforming repetitive
tasks quickly andaccurately buttheirabilitiestoadapt to changes in the
environmenti
sl
ow
.O
nt
he other hand, hu
mans are usually reliable, with
tremendous perceptive abilityand good decisionmaking in unpredictable
situations, but their accuracy is relatively
lowe
rt
hanm
achines. Shared
control canlet them compensate each weaknesswhichwould result in
be
tter control.
• Te
leoperations.
Gyrove
rc
an be
operatedb
yh
umansthrougha
radio
transmitter,whicha
llows hu
mans to participate in
the
control
of
therobot.
Themain difficultyindeveloping asharedcontrol forGyroverisdue to
the access to
the
tilt motor. Since the
lean angle of
therobot
is
con
trolled
by
the tilt
motor, not only the
autonomous module will access the
tilt motor
to achieves
tabilityi
nt
he laterald
irection, the human operator also needst
o
accesst
he tilt motorduring na
vigation.A
ta
particular time
instan
t,
these
commandsmay
con
tradict eac
ho
ther.T
herefore,i
ti
sa
big issuet
ol
et the
system decidewhichcommandisgoingtobeexecuted,and at thesame time,
managethe contaminated commandsinareasonable way.Tothis end, we have
developed an expression formaking this decision, whichwill be discussedin
the later part of this chapter. With better sharingbetween the machine and
human operator,the performance of thesystem canbeenhanced, andthe
rangeoftasksthatcan be performedbythe system canalso increase.
6.2Schemes
In fact, there aremanyaspects of “sharing”insharedcontrol, whichvaryfrom
application to application.Basically,semi-autonomous control canbecatego-
rized into serialand parallel types[120]. In theserial type,manualcontrol and
1546
Shared
Con
trol
autonomous control cannot be executedsimultaneously,only oneofthem will
be selected at atime. In parallel type,bothmanualand autonomous control
can be executed simultaneously.
In
the
fo
llo
wing
sections,
we
wil
lb
riefly
discusst
hreeo
pe
rating
m
od
es
of
shared
con
tr
ol,
namely:(
1)
Switc
hm
od
e,
(2
)D
istributed
mo
de
,a
nd
(3)
Comb
ined
mo
de.
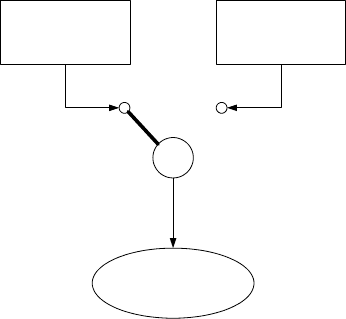
6.2.1Switch Mode
In switchmode, manual andautonomous controlare switched in serial, as
sho
wn
in
Figur
e6
.1.
The
condition
to
triggert
he
switc
hd
ep
end
so
na
pplica-
tions, for example, if an operator acts as asupervisor of thecontrol system,
the human control will only be activatedwheneverthe system reaches an “ill
condition”. No matter whichcontrol module is switched, the robotwill be
fullycontrolled by theselected one. If high cooperation between the machine
and operator is required, we must have afunction(Π )whichcan “smartly”
switch between the two control modules.
Autonomous
module
Human
operator
ROBOT
Π
Fig. 6.1. Switchmode.
6.2.2Distributed Mode
Figure 6.2 illustratesthe architectureofdistributed control. Differentfrom
switchmode, both manual andthe autonomous controlcan be executed in
parallel in thismode. The controlofvarious actuators (
u
i
)inthe entire system
will be distributedtoeither of the two modules.
Therefore, the two entities can exist in the system peacefullywithout
disturbing each other.However, thisalso shows the weaknessofthis mode