Yangsheng Xu, Yongsheng Ou. Control of Single Wheel Robots
Подождите немного. Документ загружается.

6.3
Shared
Cont
rol
of
Gyro
ve
r1
55
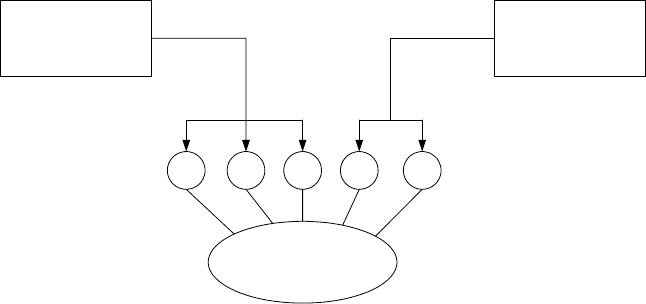
because thereisnocommunication bewteen the two entities. The operator
cannot modify thecommands fromautonomous module even if therobot
performs or tends to perform undesirable motions.
Autonomous
module
Human
operator
RO
BO
T
u
1
u
4
u
5
u
3
u
2
Fig. 6.2. Distributedcontrol mode.
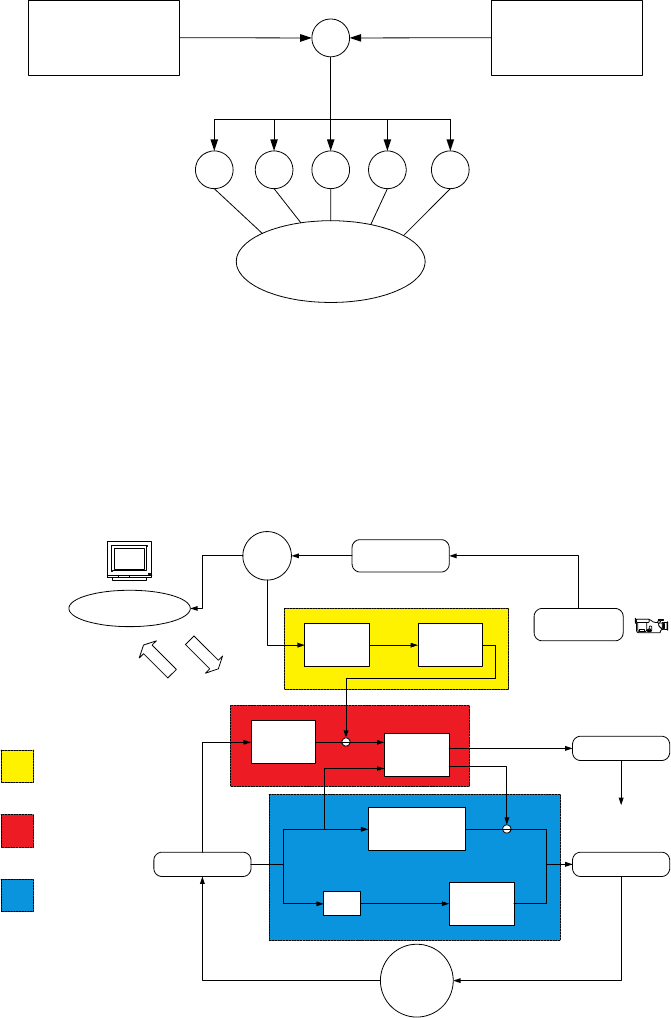
6.2.3 Combined Mo
de
Comb
ined mode is in fact an extension of
distributed mode, Figure6
.3. Ho
w-
ever,the input to asingle actuator is acombination of theoperator’s command
andt
he mach
ine’s command. Therea
re many
way
stocombine theoutput vec-
tors from the task modules: asimple summation, asimple average, weighted
sum anda
verage, voting on
angleand velocit
y,
ands
ome un
usualv
ariations.
In practice, theweighted averageperforms well since it is notcomputationally
expensiv
ea
nd itsp
erformance is predictable [29].
6.3 Shared Control of Gyrover
Analogous to the example of handling acup of tea, in ourapproach, in order
to reduce the operator burden in controlling astatically unstable robot, it
is desired that Gyroveritself can maintain adegree of local balancing, while
theoperatoronly responsible forthe navigation task. In considering which
mode of sharingissuitable forGyrovershared control, we found that the
commandsfromthe automation module (lateral balancing and tiltup)always
contradicts the navigation commands.Itisdue to the specialsteeringmech-
anism of Gyrover, whichisentirely contributed by the tilting effect of the
internal flyhwheel.
As mentioned in section3.2.1,when adisc is rolling, it will steer in the di-
rection in witchitisleaning. Since the autonomous module is designed to keep
1566
Shared
Con
trol
Autonomous
module
Human
operator
ROBOT
u
1
u
4
u
5
u
3
u
2
Σ
Fig. 6.3. Combined mode.
the leana
ngle in the verticalp
osition,ifw
eattempt to
steer
to the left/righ
t
manually (i.e. lean to the left/right), the machine will generate commandsto
stabilize the robot back to thevertical position, whichwill totally opposethe
ch
anges we
want
to
make.Therefore, the commandsfromthe two
modules
are impossible to combine into asingle valid command duringnavigation.
Tiltup
Lateral balancing
reset
sensors tilt servo
Gyrover
Heading
control
to
robot
from
robot
Path
tracking
Obstacles
avoidance
drive motor
to
robot
Map Image
Processor
Vision
Planner
Path
planning
activation
sensory and
behavior state infomation
Monitor
Video
High level behaviors
Mid-level behaviors
Low level behaviors
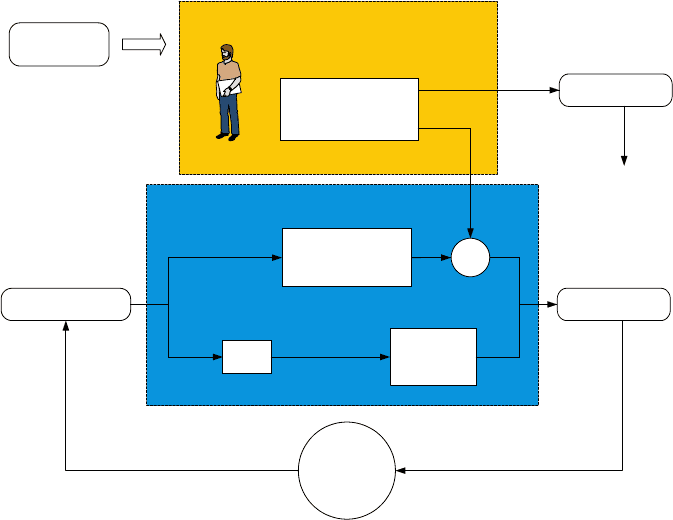
Fig. 6.4. Adetailed structure of behavior connectivity in Gyrovercontrol.
6.3
Shared
Cont
rol
of
Gyro
ve
r1
57
Referring to Figure 6.4, themid and high-level behaviorsare replaced
by ahumanoperatorinshared control. Due to thehigh flexibilityofthe
subsumptionarchitecure, we obtain the shared control architectureasshown
in
Figure
6.5,
withoutd
estorying
the
original
con
trol
stru
cture,
whic
h
sho
ws
the
be
auty
of
be
ha
vi
or-basedc
on
trol
arch
itecture.
Since
the
na
vigation
ta
sks
areentirely giventothe human operator, the operator will solely control the
drivemotor througharadio transmitter. On the other hand, because the
robot canmaintainlateralstabilitywhen it stopsrolling, or when acomplete
fall is detected, it will automaticallytiltup backtoits uprightposition. Thus,
the tilt motorisjointlycontrolled by theoperatorand themachine.
Tiltup
Lateral balancing
reset
sensors
Gyrover
Navigations
to
robot
from
robot
to
robot
Human operator
Machine
Visual
information
Fig. 6.5. Subsumption arch
itectureo
fs
hared control.
AccordingtoFigure 6.5, regarding the tilt motor, switch mode is used
sincethe operator andthe machine cannot controlthe motor at thesame
time;regarding the whole structure, the system is somewhat in adistributed
mode of sharing. As aresult, the shared controlofGyrovercombinesthe switch
mode and the distributed mode, whichcompensates eachmode’s weakness.
drive motor
tilt servo

1586
Shared
Con
trol
6.4 HowtoShare
Recalling the horse riding example, it is believed that the horse acknowledges
the
ri
der’sc
ommands
if
theye
xceed
ac
ertain
threshold.T
his
threshold
ma
y
dependonthe horse’s training (reliabilityofthe autonomoussystem), the skill
of
rider,
ando
nt
he
situation
at
ha
nd.
If
the
ri
derw
ishes
to
correct
or
mo
dify
the horsecurrentbehavior, he/shewill increase the level of stimuluswhichis
acted on thehorse (pulling thereins more or pushing harderonthe saddle).
This continues until thehorse changes itsbehavior as wished by the rider. A
poor communication or compromise between them can lead to undesirable or
even dangerous results. Therefore, in this section,wedevelopafunctionto
decide whethertofollow or neglect thecommands fromthe online operator.
First of all, let’s introduce the variablesthatconstitute thefunction, which
ares
imilar
to
those
prop
osed
in
[103]:
1. Degree of Autonomy , A where0≤ A ≤ 1.
This is ap
arameterwhichc
an be
adjusted by
the online op
erator.Ifthe
operator (a novice)wishes to rely mu
ch
more on the autonomous mo
dule,
he/she should select ah
igher value of
A at theb
eginningofanoperation.
Otherwise, if an experienced operator is confidentwith his/her control
skills, alowe
rv
alueof
A can be
selected. We
will
demonstrate theeffect
of this parameter later.
2. Strengthofconflict, S where0≤ S ≤ 1.
This parameter measures the conflict between the operator andthe current
status of the system, it
will
va
ry fromtime to time whenever the op
erator
is given
acommandtoalter the
system’s trajectory.A
high value of
S
indicates that
the
operator is making ac
ontrol commandwhichg
reatly
affectsthe current status of the system, while alow value of S indicates
that only asmall disturbance is generated. This value will pass to the func-
tion instantaneous to make adecision whether to execute the operator’s
command or not. The strength of conflict S can be definedas:
S
β
=
∂β
∂β
max
or S
out
=
| u
operator
− u
machine
|
∂u
max
(6.1)
where S
β
is measured in terms of thechanges in the lean angle β of the
robot, S
out
is in terms of
theconflictb
et
ween the command from the
operator andthe machine.
3. Confidence level , C where0≤ C ≤ 1.
Contradictory to the strength of conflict, C is aparametertoshowthe
confidence of an operator in makingthe current control command. It is
obvious that the higher value of C ,the more confidentthe operator is.
This is also atime varying parameterwhichwill pass to the function to
let the system make adecision. The confidence level C can be defined as:

6.4
Ho
wt
oS
hare
159
C =
| ∂u
operator
|
∂u
max
(6.2)
Based on the abovedefinition, at aparticular time instant, thesystem
receive
sac
ommandf
romt
he
op
er
ator
an
dt
he
mac
hine
simu
ltaneously
,a
nd
we
obtaint
he
fo
llow
ing
relationship
be
twe
en
S and C :
rcl if C>S, follow theoperator’s command,
C ≤ S, follow
th
em
ac
hi
ne’s
co
mmand.
(6.3)
The aboveexpressions imply that if the operator is confidentenoughto
modifythe currentsystem trajectory,his/her command will be executed. On
the other hand, if the system determinesthatthe commandofthe operator
is
po
ten
tia
lly
to
let
the
rob
ot
fa
ll
do
wn
,h
is/her
co
mmand
will
be
neglected,
andthe system will execute the balancing commandfromthe autonomous
module. However, the threshold of theabove expressions remains constant
anditisdependentonthe system parameters. Practically, asystem maybe
potentially operated by different operators, so it is desirable that thethreshold
of thedecision be dependentonthe operator.Tothis end, we introduce the
parameter of Degree of Autonomy ( A )intothe aboveexpressions,
rcl if C · (1 − A ) >S· A, follow theoperator’s command,
C · (1 − A ) ≤ S · A, follow themachine’s command. (6.4)
By rewriting equation(6.4),wehave,
Π ( A, S, C )=λ · C − S (6.5)
where λ =(1 − A ) /A forsimplicity, andthe decisionfinallybecomes,
rcl if Π ( A, S, C ) > 0 , follow theoperator’s command,
Π ( A, S, C ) ≤ 0 , follow themachine’s command. (6.6)
The function Π is called adecision function whichallows asystem to
decidewhether to execute thecommandfromanoperatorinashared control
environment. To validate the decision function, we let A =0,whichimplies
that theo
pe
ratord
on
ot needany
assistance from the autonomous mo
dule
and the system should respond to allthe commands fromthe operator.From
equation (5.6),
Π (0,S,C)=+∞ > 0 ∀ S, C
Π (0,S,C)isalwayspositive so that the system alwaysexecutes the commands
from the operator.Now,consider when A =1,
Π (1,S,C)=− S ≤ 0 ∀ S, C
1606
Shared
Con
trol
Π (1,S,C)isalwaysnegativeorequal to zero, whichimplies the system will
totally follow themachine commands anddisregard allthe operator’s com-
mand.
To
furtherv
alidate
th
ed
ecision
function
Π in
(6.5),
we
pe
rform
th
ef
ol-
lo
wing
expe
rimen
ts
to
see
ho
wt
he
system
w
or
ks
with
this
func
tion.
Ta
bles
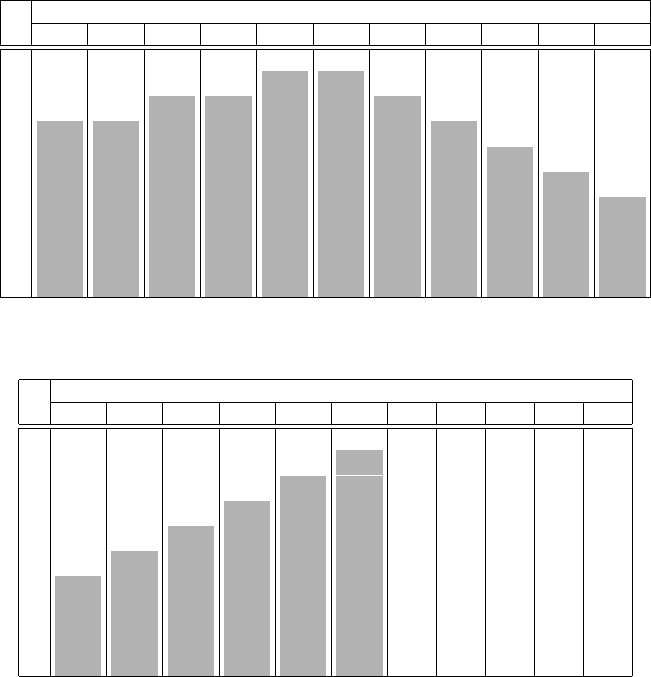
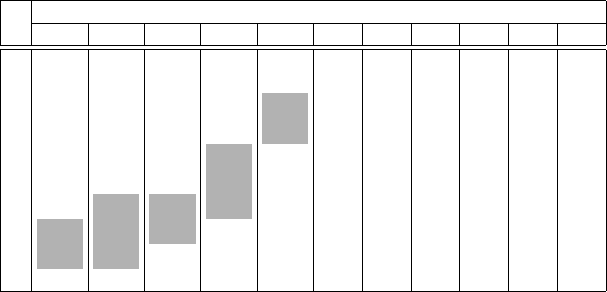
6.1, 6.2 and6.3 show thevalues obtained fromthe decisionfunction Π by
using A =0. 25, A =0. 50 and A =0. 75 respectively.Basedonthe decision
criteria in (6.6), if Π ( A, S, C )isgreaterthanzero, the system will execute
the operator’s command at that particular moment, otherwise, themachine’s
command will be executed.Ineachtable,ashaded value representsthe system
haschosenthe operator’s command.
Currentlean angle of the robot β
∂u 40
o
50
o
60
o
70
o
80
o
90
o
100
o
110
o
120
o
130
o
140
o
0 -0.56 -0.44 -0.33 -0.22 -0.11 0 -0.11 -0.22 -0.33 -0.44 -0.55
2 -0.36 -0.25 -0.14 -0.03 0.08 0.11 -0.01 -0.12 -0.23 -0.34 -0.45
4 -0.17 -0.06 0.06 0.17 0.28 0.21 0.10 -0.01 -0.12 -0.23 -0.34
6 0.03 0.14 0.25 0.36 0.43 0.32 0.21 0.09 -0.02 -0.13 -0.24
8 0.22 0.33 0.44 0.56 0.53 0.42 0.31 0.20 0.09 -0.02 -0.13
10 0.42 0.53 0.64 0.75 0.64 0.53 0.42 0.31 0.19 0.08 -0.03
15 0.09 1.01 1.13 1.01 0.90 0.79 0.68 0.57 0.46 0.35 0.24
20 1.39 1.50 1.39 1.28 1.17 1.06 0.94 0.83 0.72 0.61 0.50
30 2.14 2.03 1.92 1.81 1.69 1.58 1.47 1.36 1.25 1.14 1.03
40 2.67 2.56 2.44 2.33 2.22 2.11 2.00 1.89 1.78 1.67 1.56
Table 6.1. Decision makingof A =0. 25.
Currentlean angle of the robot β
∂u 40
o
50
o
60
o
70
o
80
o
90
o
100
o
110
o
120
o
130
o
140
o
0 -0.56 -0.44 -0.33 -0.22 -0.11 0 -0.11 -0.22 -0.33 -0.44 -0.55
2 -0.46 -0.35 -0.24 -0.13 -0.02 0.01 -0.11 -0.22 -0.33 -0.44 -0.55
4 -0.37 -0.26 -0.14 -0.03 0.08 0.01 -0.01 -0.21 -0.32 -0.43 -0.54
6 -0.27 -0.16 -0.05 0.06 0.13 0.02 -0.09 -0.21 -0.32 -0.43 -0.54
8 -0.18 -0.07 0.04 0.16 0.13 0.02 -0.09 -0.20 -0.31 -0.42 -0.53
10 -0.08 0.03 0.14 0.25 0.14 0.03 -0.08 -0.19 -0.31 -0.42 -0.53
15 0.15 0.26 0.38 0.26 0.15 0.04 -0.07 -0.18 -0.29 -0.40 -0.51
20 0.39 0.50 0.39 0.28 0.17 0.06 -0.06 -0.17 -0.28 -0.39 -0.50
30 0.64 0.53 0.42 0.31 0.19 0.08 -0.03 -0.14 -0.25 -0.36 -0.47
40 0.67 0.56 0.44 0.33 0.22 0.11 0 -0.11 -0.22 -0.33 -0.44
Table 6.2. Decision makingof A =0. 50.
6.5
Ex
pe
rimen
tal
Study
161
Curren
tl
ean
angle
of
the
rob
ot
β
∂u 40
o
50
o
60
o
70
o
80
o
90
o
100
o
110
o
120
o
130
o
140
o
0 -0.55 -0.44 -0.33 -0.22 -0.11 0 -0.11 -0.22 -0.33 -0.44 -0.55
2 -0.49 -0.38 -0.27 -0.16 -0.05 -0.03 -0.14 -0.25 -0.36 -0.47 -0.58
4 -0.43 -0.32 -0.21 -0.10 0.01 -0.06 -0.17 -0.28 -0.39 -0.50 -0.61
6 -0.37 -0.26 -0.15 -0.04 0.03 -0.08 -0.19 -0.31 -0.42 -0.53 -0.64
8 -0.31 -0.20 -0.09 0.02 0 -0.11 -0.22 -0.33 -0.44 -0.56 -0.67
10 -0.25 -0.14 -0.03 0.08 -0.03 -0.14 -0.25 -0.36 -0.47 -0.58 -0.69
15 -0.10 0.01 0.13 0.01 -0.10 -0.21 -0.32 -0.43 -0.54 -0.65 -0.76
20 0.06 0.17 0.06 -0.06 -0.17 -0.28 -0.39 -0.50 -0.61 -0.72 -0.83
30 0.14 0.03 -0.08 -0.19 -0.31 -0.42 -0.53 -0.64 -0.75 -0.86 -0.97
40 0 -0.11 -0.22 -0.33 -0.44 -0.56 -0.67 -0.78 -0.89 -1.00 -1.11
Table 6.3. Decision makingof A =0. 75.
When A =0. 25, thesystem will be more likely to rely on theoperator’s
command. In Ta
ble 6.1, mosto
ft
he operator’s commands arec
hosene
ve
n
when the Confidence level of his/her controlisquitelow (smaller ∂u). On
theo
ther hand,for ahigher va
lue of
A (Table 6.3), the
system relies on
the
machine’s commands more so that the frequency of acceptingthe operator’s
commandsreduces significantly.The aboveexperiments simply illustrate that
the decision function
Π can judgew
hether to execute ah
umanoperator’s
commands effectively by taking thevalue A into accounts, whichisveryim-
po
rtant
in
ashared cont
rolsystem.
In fact, the system neglects the operator’s commands only when thecom-
mand is potentially dangerous to the robot.Since apositive change in the
tilt command will givea
positivec
hangei
nt
he lean angle of
therobot,
if the
lean angle is beyond 90
o
,alarger ∂u will makethe lean anglegrowbigger,
whichpotentially makes the robot falls down. Therefore, in this case, if the
operator is notc
onfidentenoughtomakethis ch
ange, his/her command will
be neglected.
6.5 Experimental Study
In this section,weimplementthe shared controlframework as showninFigure
6.5,byapplying the decisionfunctionwehavementioned in the last section.
We have designed severaltasksfor therobot to perform under theshared
control scheme, including(i) headingcontrol (ii) straight path tracking, (iii)
circular path tracking, and(iv) point-to-pointnavigation.
Since the autonomous module nowinhandisonly responsible forthe lat-
eral stabilizationand tiltup motion when therobot is heldinastationary
location, the navigation task of therobot will be entirely given to the human
operator to control, whichimplies that the human cannot rely on themachine
1626
Shared
Con
trol
throughout the navigation.Basedonthis limitation,weuse arelatively high
level of autonomy(A ≈ 0 . 25) in Gyrovershared control. From theexperi-
ments, we can observethateventhe operator hasshared alevel of control
with
the
system,
an
dt
he
rob
ot
can
still
ac
hieve
so
me
ba
sic
goals
in
mo
bile
teleop
erations.
6.5.1 HeadingControl
The purposeofthis experimentistoillustrate the cooperation between the
human operator andthe autonomous module in asharedcontrol environment.
One
sp
ecial
featureo
fG
yro
ve
ri
st
he
ab
ilit
yt
ot
urn
in
to
ad
esirable
he
ading
directionatastationary location, this motion canbeachieved by controlling
thelean angleofthe robot(left/right) until the desired headingdirection is
reached.
When the robotisnot rolling, the system will automatically execute the
lateral balancing module in order to maintain itslateralstability, by control-
ling thetilt motor. If the operator wishes to command the robottoturn into
ap
articular headingangle,he/she needst
om
aket
he robo
tl
ean at
acertain
angle by controllingthe tilt motor; also, in this case, therobot must stopthe
autonomousmodule andexecute the op
erator’s command. Therefore, if the
system cannot makethe right decision, the operator can nevercontrol the
robottoturn into adesired headingdirection.
The result of
using
A =0. 2and A =0. 8i
nt
he heading con
trol testis
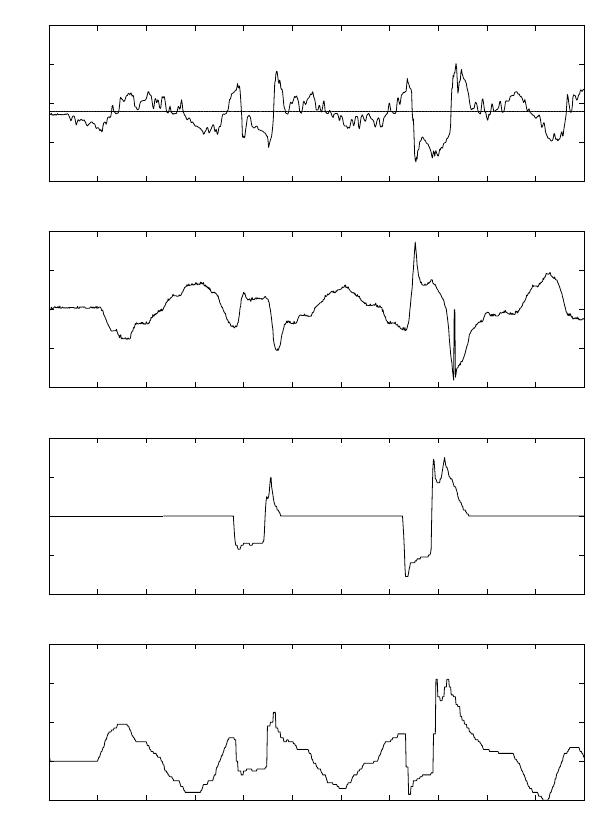
shown in Figure6.6 and Figure6.7 respectively.For A =0. 2, theoperator
triggers the controlofthe tilt
motora
t7
. 5 ≤ t ≤ 9 . 5and
14
. 5 ≤ t ≤ 17,
in order to make therobot lean to aparticular heading angle. It is clear
that the op
erator augments
the
control
in
these
pe
riods
successfully,
whichis
expected when alow degree of autonomyisused. When thereisnocommand
fromthe op
erator,the robotwill execute the lateral balancingc
ontrol from
the autonomous module in order to keep the robotaround 90
o
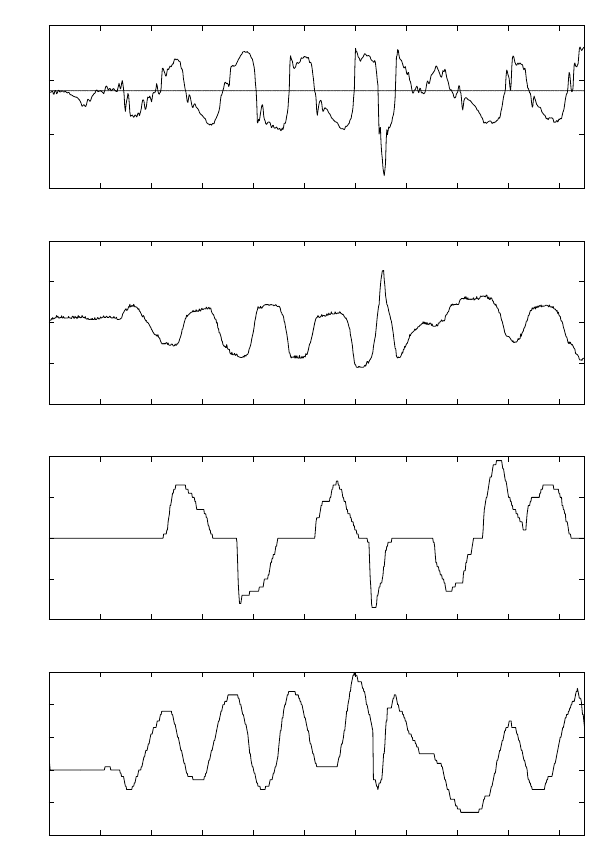
.For A =
0 . 8, thecontrol trajectory of theoperatoriscompletely different fromthe
finalcontrol output to the system.The operator wantstotrigger thetilt
motor, butthe system neglectsmost of his/her commandsand continues to
execute the lateral balancing commands from the autonomous module. The
system will only execute those commandsfromthe operator only when the
particular command greatly contributes to keepingt
he robo
ta
t9
0
o
,orwhe
n
the confidence level is high, forinstance,at t ≈ 13 and t ≈ 17.
6.5.2 StraightPath
In thestraightpath test,the operator is askedtocontrol therobot to travel
astraightpath,approximately 44 ft long. Theexperimental setupisshown in
Figure 6.8.Three trails are giveninthis experiment, thetrajectory that the
robothas travelled in each trail is showninFigure 6.11. The sensordata of
therobot in trail #3 is plotted in Figure 6.12.
6.5
Ex
pe
rimen
tal
Study
163
0 2 4 6 8 10 12 14 16 18 20 22
0
50
100
150
200
β [deg]
time(sec)
lean angle of Gyrover
0 2 4 6 8 10 12 14 16 18 20 22
−100
−50
0
50
100
β
a
[deg]
time(sec)
tilt angle of flywheel
0 2 4 6 8 10 12 14 16 18 20 22
140
160
180
200
220
Tilt Command
time(sec)
Tilt command (Human)
0 2 4 6 8 10 12 14 16 18 20 22
160
180
200
220
240
Tilt Command
time(sec)
Tilt command (robot)
Fig. 6.6. Sensor data acquiredinthe heading control test, A =0. 2.
Under ashared control, althoughsome of thecontrol commands areig-
nored by thesystem (flattened peaks in thefinaloutput of tilt motor com-
mand), the operator is still able to control the robot to travel anearly straight
path, withanaverage 0
. 1736 ft offset fromthe desiredpath.At
t =9,the
robotreceived no commandsfromthe operator andstarted to execute the
lateral balancing module to balance the robot. As mentioned earlier, the con-
trol of the drive motorisentirely giventothe operator,therefore, the system
1646
Shared
Con
trol
0 2 4 6 8 10 12 14 16 18 20
0
50
100
150
β [deg]
time(sec)
lean angle of Gyrover
0 2 4 6 8 10 12 14 16 18 20
−100
−50
0
50
100
β
a
[deg]
time(sec)
tilt angle of flywheel
0 2 4 6 8 10 12 14 16 18 20
−20
−10
0
10
20
Tilt Command
time(sec)
Tilt command (Human)
0 2 4 6 8 10 12 14 16 18 20
−20
−10
0
10
20
30
Tilt Command
time(sec)
Tilt command (robot)
Fig. 6.7. Sensor data acquiredinthe heading control test,
A =0. 8.
will not interfere with the drive motorcommand, which directly follows the
control of theoperator.