Yangsheng Xu, Yongsheng Ou. Control of Single Wheel Robots
Подождите немного. Документ загружается.

1245
Fu
rther
To
pics
on
Learning-based
Con
trol
A =[a
1
,a
2
,.
..,
a
m
] ,
B =[b
1
,b
2
,..., b
m
] ,
where
a
j
=
∂
2
f
∂x
j
∂x
i
, ∀ i =1, 2 ,.
..,
m,
b
j
= x
j
− ¯x
j
, ∀ i =1, 2 ,..., m.
Then,Equation (5.11)evolves to be
∂f
∂x
i
=
∂f
∂x
i
X =
¯
X
+ AB
T
+ o ( ||( X −
¯
X ||) . (5.12)
AB
T
≤
( a
1
+ a
2
+ ... + a
m
)
2
( b
1
+ b
2
+ ... + b
m
)
2
≤
m
2
( a
2
1
+ a
2
2
+ ... + a
2
m
)(b
2
1
+ b
2
2
+ ... + b
2
m
)
≤
mξ
2
r
2
(
∂f
∂x
i
)
2
.
Submitting Equation (5.9) into it we have
AB
T
≤|
∂f
∂x
i
| /η.
Thus, AB
T
is ahigher order smaller andthe effect on thelinear relationis
small.
We assume thatthe sampling time intervalissmall enough. Then,weuse
finite-difference to approx
imate the
first order differentials.
dY ≈ δY,dx
i
≈ δx
i
,i=1,..., m,
where δY = Y ( t +1) − Y ( t )and δx
i
= x
i
( t +1) − x
i
( t ).
Equation(5.10) will be
δY =
∂f
∂x
1
X =
¯
X
δx
1
+
∂f
∂x
2
X =
¯
X
δx
2
+ ... +
∂f
∂x
m
X =
¯
X
δx
m
+ o ( ||δX||) . (5.13)
In fact,t
he sampledata aret
he observation forthe true values of
the
variables. From thesample data selection condition 1inEquations (5.7), we
knowthatthe sensorreading error is ahigher order smaller. By combining
the approximation errorand sensorreading error together, we have
δY =
∂f
∂x
1
X =
¯
X
δx
1
+
∂f
∂x
2
X =
¯
X
δx
2
+ ... +
∂f
∂x
m
X =
¯
X
δx
m
+
, (5.14)
where
partiallycomesfrom ,and assums independentGaussian distribution
with E (
)=0and V (
)=σ
2
.
Second, we use Least-squares theorytoestimate
∂f
∂X
in all k data groups.
If we let
∂f
∂X
be β ,Equation (5.14) becomes
δY = β
1
δx
1
+ β
2
δx
2
+ ... + β
m
δx
m
+
, (5.15)
where β =(β
1
,β
2
,..., β
m
).

5.1
Inpu
tS
election
for
Learning
Human
Con
trol
Strategy
125
If we let
¯
N
i
be thenumberofsample data in group i ,(i =1, 2 ,..., k ). For
eachgroup i ,weforma
¯
N
i
× m data matrixXanda
¯
N
i
× 1datavector Y.
Data
matrices
and
ve
ctors
ar
ew
ritteni
nr
oman
lettersa
nd
va
riablesi
n
italic.
The least squares estimator
ˆ
β of β is obtained by minimizing
LSE =(Y − X β )
T
(Y − X β ) . (5.16)
If we takethe derivativeofEquation(5.16) with respect to β ,ityields the
normale
quation
(X
T
X)β =X
T
Y . (5.17)
As addressedabove,eventhough X aresimilar to each other, δX are
sufficien
tly
differen
tt
oe
ac
ho
ther.A
lthough
in
most
cases,
(X
T
X)
− 1
exists,
here we do notdiscuss it, howeverwewill discuss it later. Assumingthatit
exists, the linear equation(5.17) hasaunique solution. Then, pre-multiplying
Equation (5.17) by (X
T
X)
− 1
gives theleast squares estimatorof β ,thatis,
ˆ
β =(X
T
X)
− 1
X
T
Y . (5.18)
If thea
bo
ve
assumptionholds, thel
east squares theory prov
ides us with
the following we
ll-known
results [38]:
The k × 1vector
ˆ
β hasthe following properties:
1.
E (
ˆ
β )=β ;
that is,
ˆ
β is an unbiased estimatorf
or
β .
2.
ˆ
β is the best linear un
biasede
stimator(BLUE) for
β ,t
hati
s, among
the class of linear un
biasede
stimators,
ˆ
β hast
he smallestv
ariance. The
variance of
ˆ
β is
Var (
ˆ
β )=σ
2
(X
T
X)
− 1
.
As the ab
ov
eEquation sho
ws, andw
eknow
∂f
∂X
X =
¯
X
= β ,therefore
ˆ
β is
an ideal estimator for
∂f
∂X
X =
¯
X
.
The sensitivitycoefficient
∂Y
∂x
i
is an estimate of the number of unitsthat
change in thevariable Y as aresult of aunit change in theparameter x
i
.This
alsomeans that the sensitivityresult depends on itsphysical units of variables
andparameters, andismeaningfulonly when theunitsofthe modelare
known.Ingeneral cases, the variablesand the parameters eachhavedifferent
physical units, andtherefore thesensitivitycoefficients cannot be compared
with eachother.Here, we assume that all data have been well calibrated. If
not, theyneed to be properly scaledaccordingtothe physical meaning.

1265
Fu
rther
To
pics
on
Learning-based
Con
trol
GlobalSignificance Order
Thenumberofnoisysample data pairs is limitedinalocaltime piece and it
is
note
nought
od
ep
end
on
on
ly
on
eo
rs
ev
eral
lo
ca
ln
ormalized
sensitivities
to
determine
th
eg
lobal
significance
or
der.
We
ne
ed
to
com
bi
ne
a
ll
of
the
time
piece information to determinethe significance order.
The most direct way to define the significance order is sorting the sum-
mary of thenormalized sensitivity coefficients. To avoid thenormalized sen-
sitivity
co
efficien
ts
canceling
ou
tw
ith
po
sitiv
ea
nd
neg
ative
va
lues
dur
ing
the
summationprocess,weuse their absolute values. Then,wedefinethe Direct
Significance Evaluation function as
I ( x
i
)=
1
k
k
j =1
| S
j
( x
i
) | , (5.19)
where
S
j
( x
i
)=
ˆ
β
j
i
,i=1, 2 ,..., m, j
=1, 2 ,..., k.
Usually,t
his definition wo
rks well. Howe
ve
r, in some casesw
here out-
liersare in evidence,some errordata points of aparameterare much larger
than others and as
suc
ht
hey willgreatlya
ffect the av
eragev
alue. In these
conditions, we have to seek another definition for the significance evaluation
function. According to
probabilityt
heory,the most
important
parameterh
as
the largest possibilitytobethe first important parameter. We can redefine
the significance evaluationfunctioninthe following steps;
1. In eachlocal time piece, we
sort the absolute values of
normalizedsensi-
tivitycoefficients.
2. Fo
re
achp
arameter
x
i
,w
ec
ollectthe times
fore
achp
ossible order. We
define n
l
( x
i
)asthe number of times that | S ( x
i
) | is the l
th
largest, where
l =1,..., m .
3. We define p
l
( x
i
)a
st
he po
ssibilityt
hat
| S ( x
i
) | is the l
th
largest, where
l =1,..., m .
p
l
( x
i
)=n
l
( x
i
) /k × 100%,
where n
l
( x
i
) ≥ 0and
m
l =1
n
l
( x
i
)=k.
4. Foreachparameter, we definethe Statistical Importance Evaluation func-
tion as
I ( x
i
)=p
1
( x
i
) × 10
m − 1
+ p
2
( x
i
) × 10
m − 2
+ ...p
m
( x
i
) . (5.20)
Thus, theinput variablesselection canbeperformedafterweworkout
the significance evaluationvalues forreal learningproblems.
5.1
Inpu
tS
election
for
Learning
Human
Con
trol
Strategy
127
5.1.3 DependencyAnalysis
First, we will use an example to distinguishthreeterms, “relevant”, “depen-
den
t”
an
d“
(linear)
relativ
e”
,w
hic
hw
ill
be
usedi
n
this
ch
apter.
Supp
ose
th
at
x
1
, x
2
, x
3
and x
4
ha
ve
the
fo
llo
wing
relations
x
3
= x
1
x
2
x
4
=3x
1
+2x
2
.
Then the relationbetween x
1
and x
3
is
“relev
an
t”,
butn
ot
“d
ep
en
den
t”
or
“(linear) relative”.The relation among x
1
, x
2
and x
3
is “dependent” and
“relevant”, but not“(linear) relative”.The relation between x
1
, x
2
and x
4
is
“(linear) relative”, “dependent” and“relevant”. The“dependent”relationis
importantinthe latertwo subtasks described in Section 5.1.3.
Let
´
X =[´x
1
, ´x
2
,..., ´x
¯ m
], be asubsetof X and¯m ≤ m .Let’s consider the
relation among
´
X .Supposedthatthe relationship of them is “dependent” and
´x
¯ m
= f
(´x
1
, ´x
2
,..., ´x
¯ m − 1
) . (5.21)
We needtouse the sample data table to verify this relation. After the data
selection andregroupingprocess,w
eknowthateachgroup of
data arev
ery
neartoeachother in the ¯m − 1dimension data space. Then,byafirst-order
Ta
ylor series expansion, we
transform ournonlinearm
apping Equation (5.21)
into an almost linearone
d ´x
¯ m
=
∂f
∂ ´x
1
d ´x
1
+
∂f
∂ ´x
2
d ´x
2
+ ... +
∂f
∂ ´x
¯ m − 1
d ´x
¯ m − 1
+ o ( ||d
´
X ||) . (5.22)
If thereisa“dependent” relationamong
´
X ,then they will be almost “(linear)
relative
”a
mong
d
´
X .A
sn
otedearlier,eventhough
´
X ares
imilar to
each
other,
d
´
X aresufficiently differentfromeachother.
As the similar analysis before we have
δ ´x
¯ m
=
∂f
∂x
1
X =
¯
X
δ ´x
1
+
∂f
∂x
2
X =
¯
X
δ ´x
2
+ ... +
∂f
∂x
¯ m − 1
X =
¯
X
δ ´x
¯ m − 1
+¯, (5.23)
where¯ is similar to
whichisahigher order smaller with respect to δ ´x
¯ m
.If
we let
∂f
∂X
X =
¯
X
be
¯
β ,Equation (5.23) becomes
δ ´x
¯ m
=
¯
β
1
δ ´x
1
+
¯
β
2
δ ´x
2
+ ... +
¯
β
¯ m − 1
δ ´x
¯ m − 1
+¯, (5.24)
where
¯
β =(
¯
β
1
,
¯
β
2
,...,
¯
β
¯ m − 1
).
We use Least-squares theorytoestimate
¯
β in all k data groups in the
following Equation.
ˆ
¯
β =(
¯
X
T
¯
X)
− 1
¯
X
T
¯
Y . (5.25)
To eliminate the possibilitythatthe terms in Equation (5.24), will cancel
eachother,let

1285
Fu
rther
To
pics
on
Learning-based
Con
trol
||δ ´x
¯ m
|| = |
¯
β
1
δ ´x
1
| + |
¯
β
2
δ ´x
2
| + ... + |
¯
β
¯ m − 1
δ ´x
¯ m − 1
| . (5.26)
We define the “(linear) relative” coefficientas
ρ =
¯
||δ ´x
¯ m
||
. (5.27)
Foreachdata pointineachdata group, we will calculate the “(linear)
relativ
e”
co
efficien
t.
Fo
re
ac
hg
roup,
if
the
g
roup
has
¯
N
m
data points, we
define the average“(linear) relative” coefficientas,
¯ρ =
¯
N
m
i =1
ρ
2
i
/
¯
N
m
, (5.28)
where¯ρ oughttobeasmall number around 0 . 1(≤ 0 . 2).
Accordingtothe information derivedfromthesecoefficients, we can de-
terminet
he “(linear)relative”
relationa
mong the first-order derivativeof
´
X
and, further, the nonlinear“dependent” relationship amongthem.
Fu
rthermore, if the relation among
´
X is not dependent,
then we
can
use
the aboveanalysistoverifythe self-contained relation between Y and
´
X .If
they have
as
elf-contained relation, they will have
ad
ependentrelationand
their first-order deriva
tives
will
exhibit anearly “(linear) relative”
relation. It
is possible that some other featureswill affect Y .However, since the “(linear)
relative”
co
efficien
tissmall, the relevance of features should be
we
ak, which
means they will be removed fromthe keyfeature set.
Thus, we
can
summarize our input selectiona
pproachb
yt
he following
steps.
1. Perform thesignificance analysis between the fullfeatures andthe learning
output. Reorder the featuresa
ccordingt
ot
heirsignificance.
2. Selectthe first importantfeature with learning outputtocarry outthe
self-contained analysis. If the learning outputisdependentonthe first
significantfeature, stop and report theresult.
3. If not, combine the first significantfeature with the second significant
feature to perform adependentanalysisbetween them. If the second sig-
nificantfeature is dependentonthe first significantfeature, remove the
feature andgotothe nexts
tep. If the relations are notdependent,
execute
the self-con
tained analysis betwe
en these two
featureswith the learning
output. If thelearningoutput is dependentonthesetwo features, stop
andreport the result.
4. Combine thefeatures in the former step with the next significantfeature to
perform adependentanalysisamong them. If the next featureisdependent
on theformerfeatures, remove the feature andgobacktothe beginning
of this step,until thereisnofeature left, stop andreportthe result.Ifthe
relations arenot dependent, execute theself-contained analysis between
this new setoffeatures with the learning output. If the learningoutput
5.1
Inpu
tS
election
for
Learning
Human
Con
trol
Strategy
129
is dependentonthesenew set of features,gotothe nextstep. If not, go
back to the beginning of this step,until thereisnofeature left, stop and
reportthe result.
5.
Remo
ve
the
fe
atures
on
eb
yo
ne
an
dp
er
form
th
es
elf-con
tained
analysis
to
eliminate
an
yr
edundan
tf
eatures
still
remaining,
un
til
al
lf
eatures
are
critical.
St
op
an
dr
ep
or
tt
he
res
ult.
Sinces
ome
fe
atures
ma
yb
ed
ep
end
en
to
ns
ome
later
fe
atures
or
th
ec
om-
bination of someformerfeatures and later features, thus,the last step is
necessary andimportant.
5.1.4Experimental Study
Thea
im
of
this
exp
erimen
ti
st
oi
llustrate
ho
wt
ou
se
the
pro
po
sed
criter
ion
to realize theinput variablesselection andvalidate the approach.
The controlproblemconsistsoftracking Gyroverinacircle within ade-
fined radius.Inthe experimental system,for eachsampling process,wecan
collect 20 sensorreadings. Their
definitions andphysical meanings areshown
in Table 5.1. Among them, thereare 11 sensor readings, ‘ADC0’∼ ‘ADC10’,
correspondingtothe system statesvariables. Thereare alsotwo majorsen-
sorr
eadings, ‘PIR0’ (PIC-IN-READ 0) and ‘PIR1’(PIC-IN-READ 1), corre-
spondingtothe two control inputs: U
0
controlling the rolling speed of the
single wheel ˙
γ ,and U
1
controlling
the
angular position of
theflywheel
β
a
.For
the manual-model (i.e. controlled by ahuman), U
0
and U
1
areinput by joy-
sticks, and in the auto-model, they arederived fromthe software controller.
During all experiments,w
eo
nly fo
cusonthe value of
U
1
andfi
xt
he va
lue
of U
0
to some suitable value. Since the capabilityofspinning motor forthe
flywheelislimited, after it drives the flywheel to the working spinning speed
˙γ
a
,the motorwill try to maintain this speed. Thus,‘PIR3’ (PIC-IN-READ 3)
can notbeacontrol input anditisfixed duringthe data producing process,
too.
Ahumanexpert controlled Gyrovertotrack afixed 3-meter radius circular
path andproducedaround N =30744 trainingsampleswith identicaltime
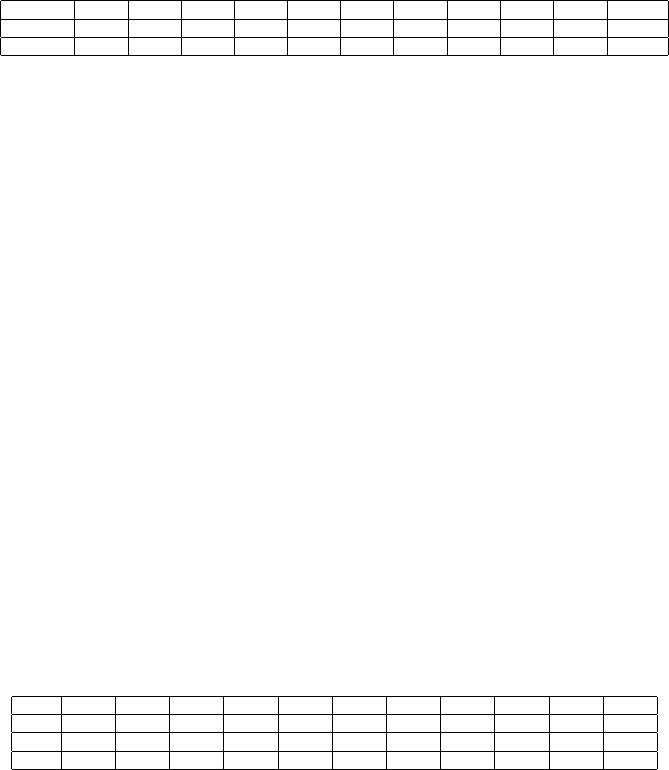
intervals ( δt =0. 025s ). Table 5.2displays some rawsensor data fromthe
human expert controlprocess.Inthe learningcontrol trainingprocess,the
system states variablesare the learningmodel inputs andtilt command U
1
is
themodel output. If we put all of the11sensor readings, ‘ADC0’ ∼ ‘ADC10’,
into thelearningprocess,the input dimensionistoo large to process areliable
model duetothe ‘
curse of dimensionality’. Thereforeweneed to perform input
variablesselection. Here, we use
significance analysis
approachand dependence
analysis approachfor it.
SignificanceAnalysis Study
It is the aimofthis step to rank the 11 system variables(model inputs) in
significance order with respect to the tilt command (modeloutput).
1305
Fu
rther
To
pics
on
Learning-based
Con
trol
Column Sensor
name
Fu
nction
descriptions
1 Counter read Spinning angle of flywheel
2 ADC0 Tilt servoposition,i.e., tilt angle of flywheel β
a
3 ADC1 Tilt servocurrent
4 ADC2 Drivemotor current
5 ADC3 Roll rateofGyro,i.e., roll rate of single wheel
˙
β
6 ADC4 Pitchrate of Gyro
7 ADC5 Yawrate of Gyro, i.e., precession rate of single wheel ˙α
8 ADC6 Xaccelerometer
9 ADC7 Yaccelerometer
10 ADC8 Zaccelerometer
11 ADC9 Xtilt sensor
12 ADC10 Ytilt sensor, i.e., lean angle of single wheel β
13 PIC-IN-READ 0 Drive command U
0
14 PIC-IN-READ 1 Tilt command U
1
15 PIC-IN-READ 3 Command for spinning speedofflywheel
16 PIC-OUT-READ 0 Drive command
17 PIC-OUT-READ
1
Tilt
command
18 PIC-OUT-READ 3 Command for spinning speedofflywheel
19 instantaneous speed instantaneous driving speedofsingle wheel ˙γ
20 average speed instantaneous driving speedofsingle wheel
¯
˙γ in 5sampling
intervals
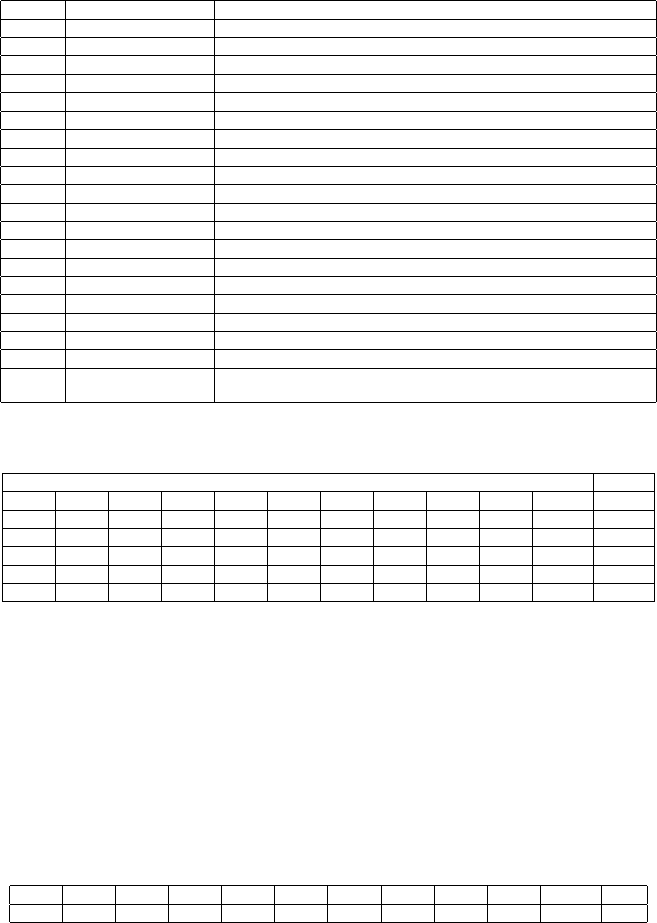
Table 5.1. Gyrover’s sensor data string
Input Output
ADC0 ADC1 ADC2 ADC3 ADC4 ADC5 ADC6 ADC7 ADC8 ADC9 ADC10 PIR1
2.614 0.029 -0.004 0.422 0.617 1.696 2.440 2.589 3.624 5.821 5.874 180
2.646 1.970 1.989 0.410 0.500 2.104 2.885 2.528 3.178 6.060 6.168 179
2.585 6.245 1.935 -0.300 0.659 2.717 2.724 2.393 3.221 6.021 6.407 178
2.419 3.308 3.475 0.505 0.478 0.310 2.172 2.489 3.214 6.075 5.400 178
2.382 3.352 3.636 -0.678 0.468 1.616 2.601 2.739 3.769 6.075 5.997 175
Table 5.2. Sample of human control data
First, we obtainthe sensorreading error information as follows. If we fix
Gyroverinsome position andstart it, all sensor readings should keep in some
va
lues. In
fact, they are changinga
round their true values forthe noisesake.
Then we keep recording the sensor readings for aperiodoftime and collect
hundreds of
sensor
readings foreachsensor. From thesedata, we
obtain the
noise variance σ forall variables, ‘ADC0’∼ ‘ADC10’and ‘PIR1’asshown in
Table5.3.
ADC0 ADC1 ADC2 ADC3 ADC4 ADC5 ADC6 ADC7 ADC8 ADC9 ADC10 PIR1
0.007 0.003 0.006 0.006 0.004 0.004 0.006 0.006 0.007 0.002 0.003 0.019
Table 5.3. Thenoise variance
σ informationfor variables
Second, we select and regroupdata points T
j
=[X
j
,Y
j
](j =1, 2 ,..., 30744)
fromthe whole data table as in thefollowing steps.
5.1
Inpu
tS
election
for
Learning
Human
Con
trol
Strategy
131
1. AccordingtoEquation (5.6) we calculate the first derivatives forall data
points.
2. AccordingtoEquation (5.7) we select and place thedata points into a
new
da
ta
table
with
14,634d
ata
po
in
ts
by
remov
ing
the
da
ta
po
in
ts
that
their
firs
td
eriv
ativ
es
are
less
than
the
noise
(
η =1
).
3. According to Equations(5.8) and(5.9),weworkout
¯
N =22and r =0. 5.
4. Accordingto r =0. 2, we cluster the 14634data points into 6340 groups.
5. Accordingto N =22, we select 45 data groupsfromthe 6340 groupby
removing the groups in which thedata numbers areless than 22.
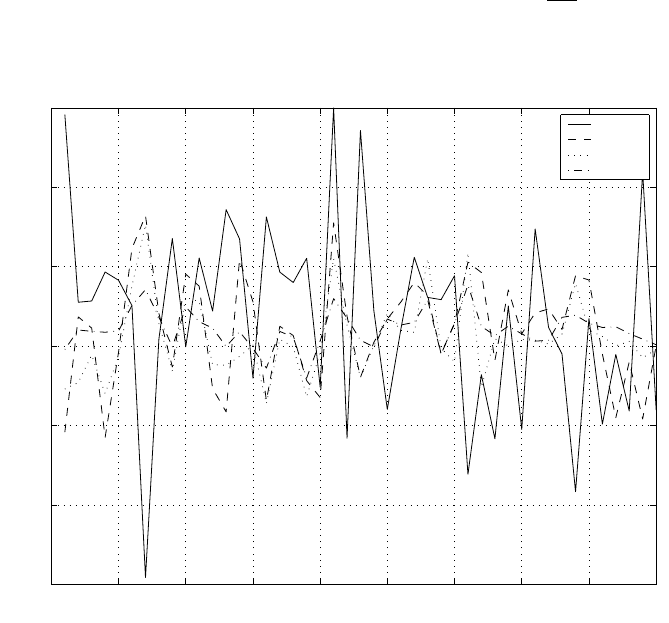
Third, we perform thelocal sensitivity analysis(Local SA). Accordingto
Equation (5.18), we work outthe sensitivity coefficients β =
∂f
∂X
forall 45
data groups. Thelocal sensitivitycoefficients of the firstfourmost significant
variablesare shown in Figure 5.2.
0 5 10 15 20 25 30 35 40 45
−15
−10
−5
0
5
10
15
Local sensitivity coefficents
groups
ADC0
ADC9
ADC10
ADC4
Fig. 5.2. Thelocal sensitivitycoefficients of the first four significance variables.
Last, we rank allthe system variablesinthe global significance order.
According to theDirect Significance Evaluation function in (5.19), we work
outthe global significance value I ( x
i
)for eachsystems variable andorder
them in Table 5.3.
1325
Fu
rther
To
pics
on
Learning-based
Con
trol
Va
riables
ADC0 ADC1 ADC2 ADC3 ADC4 ADC5 ADC6 ADC7 ADC8 ADC9 ADC10
I ( x
i
) 331.53 3.07 5.23 25.48 73.99 51.71 15.29 24.91 11.26 173.14 97.89
rank 1 11 10 6 4 5 8 7 9 2 3
Ta
ble
5.4.
Thes
ignificance
ordert
able
We
pe
rformedt
he
significance
an
alysise
xp
erimen
ts
sev
eral
times
with
differentdata setcombinations. Theresults are quite similar fromtime to
time.
DependenceAnalysis Study
The aimofthis step is to obtainthe smallestset of system variablesand the
controlinput is dependentonthis setoffeatures.
First,
we
execute
the
self
-con
ta
ined
an
alysis
be
twe
en
all
o
ft
he
m =1
1
system variableswith the tilt command.
1. We
select and regroupdata po
ints
T
j
=[X
j
,Y
j
](j =1, 2 ,..., 30744) from
the whole data table.
2. According to
Equation (5.6), we
calculate
thefi
rst derivatives for alldata
points.
3. AccordingtoEquation (5.7) we select and place thedata points into a
new data table
with 1,085 data po
ints by
removing the data points
that
their firstderivatives are less than ten times the noise variance σ ( η =10).
4. Accordingt
o
r, N ,w
ec
luster and select
the 1,085 data po
ints into 22
groups.
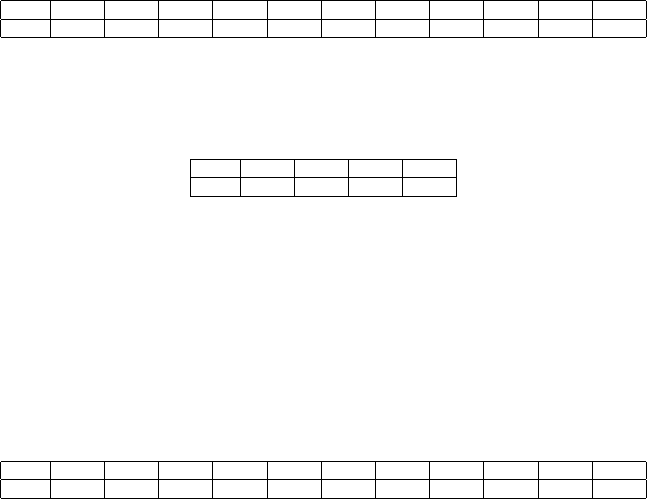
5. According to Equations(5.24)-(5.28),for eachgroup, we calculate the
average ”(linear) relative” coefficients that areinTable 5.5.
group 1 2 3 4 5 6 7 8 9 10 11
¯ρ 0.1011 0.1041 0.1103 0.1252 0.1280 0.1103 0.1232 0.1022 0.1235 0.0903 0.1250
group 12 13 14 15 16 17 18 19 20 21 22
¯ρ 0.1257 0.0983 0.1011 0.0865 0.1250 0.1078 0.0990 0.1030 0.1003 0.0316 0.099
Table 5.5. Theaverage “(linear) relative”coefficients ¯ρ in full system variables
Table 5.5exhibits that the tilt command is dependentonthesesystem vari-
ables. However,
m =11istoo hightotrain alearningcontroller.
Second, according to thesignificance order in Table 5.4, we addthe vari-
able onebyone andexecute the dependenceanalysisbetween the former fea-
tures with thenew features andself-contained analysis between the selected
set of features withthe tilt command. After thesimilar process with the
full variable self-contained analysis, we stopwith aset variablesof(‘ADC0’,
‘ADC9’, ‘ADC10’, ‘ADC4’, ‘ADC5’, ‘ADC3’). Table 5.6 shows part of theav-
erage“(linear) relative” coefficients of theself-contained analysis between the
5.1
Inpu
tS
election
for
Learning
Human
Con
trol
Strategy
133
set variablesof(‘ADC0’, ‘ADC9’, ‘ADC10’, ‘ADC4’, ‘ADC5’) with tilt com-
mand.Table 5.7shows theaverage “(linear)relative” coefficients of theself-
contained analysisbetween the set variablesof(‘ADC0’, ‘ADC9’, ‘ADC10’,
‘ADC4’,
‘ADC5’,‘ADC3
’)
with
the
tilt
command.F
romT
able
5.6,
thes
et
fea-
tures
(‘ADC0’,
‘ADC9’,
‘ADC10’,
‘ADC4’,
‘ADC5’)
can
notd
eterminet
he
tilt command and fromTable 5.7, thetilt command is almost dependenton
the variablesof(‘ADC0’, ‘ADC9’, ‘ADC10’, ‘ADC4’, ‘ADC5’,‘ADC3’).
group 1 2 3 4 5 6 7 8 9 10 11
¯ρ 0.5851 0.7654 0.5944 0.6203 0.5336 0.5574 0.5112 0.5799 0.5863 0.6530 0.5334
Table 5.6. Part of ¯ρ in the5variables
group 1 2 3 4
¯ρ 0.1862 0.1654 0.1862 0.1247
Table 5.7.
¯ρ in the6v
ariables
Last, we
remove
theset features of
(‘ADC0’,
‘ADC9’,
‘ADC10’, ‘ADC4’,
‘ADC5’,‘ADC3’), one by onetoobtain the smallestset of features.The final
result is (‘ADC0’, ‘ADC10’, ‘ADC5’, ‘ADC3’).The self-cont
ained analysis
between the set variablesof(‘ADC0’, ‘ADC10’, ‘ADC5’, ‘ADC3’) with the
tilt command is shown in Table 5.8. Thetable showsthattilt command is
almost dependentonthe variablesof(‘ADC0’, ‘ADC10’, ‘ADC5’,
‘ADC3’).
group 1 2 3 4 5 6 7 8 9 10 11
¯ρ 0.1250 0.1198 0.1224 0.1219 0.1168 0.1219 0.1198 0.1250 0.1198 0.1168 0.1219
Table 5.8. Part of ¯ρ in the4variables
Learning ControlResult
Based on theseinput variables, we builtupanartificial neuralnetwork(ANN)
learning controller, basedonlearningimparted fromexpert human demon-
strations. Here, the ANN is asupportvector machine learningarchitecture
(SVM), in [81], whichcan realize avery high learning accuracy with limited
data points. We trainedanSVM learning controller to control Gyrover. The
learningcontroller works well and the model is very reliable.Figure 5.3 shows
the SVMlearningcontrol results.