Васюра Ю.Ф. Математические методы расчета установившихся режимов работы электроэнергетических сетей
Подождите немного. Документ загружается.

101
( )
( )
ï
ï
ï
î
ï
ï
ï
í
ì
+-+=
+-+=
*
*
*
*
,,
,
3
23
2
2
2
22
1
21
21
2
3
13
1
1
2
12
1
11
21
1
UY
U
S
UYUYUUW
UY
U
S
UYUYUUW
или на
-
i
ом шаге итераций:
()
()
() ()
()
() ()
()
ú
ú
ú
ú
ú
ú
ú
û
ù
ê
ê
ê
ê
ê
ê
ê
ë
é
+-+
+-+
=
*
*
*
*
3
23
2
2
2
22
1
21
3
13
1
1
2
12
1
11
UY
U
S
UYUY
UY
U
S
UYUY
UW
i
ii
i
ii
i
.
Составим матрицу Якоби:
()
()
()
()
.
2
2
2
2221
12
2
1
1
11
ú
ú
ú
ú
ú
ú
ú
ú
ú
ú
û
ù
ê
ê
ê
ê
ê
ê
ê
ê
ê
ê
ë
é
÷
÷
ø
ö
ç
ç
è
æ
+
÷
÷
ø
ö
ç
ç
è
æ
+
=
¶
¶
*
*
*
*
i
i
i
U
S
YY
Y
U
S
Y
U
UW
Как видно из полученной матрицы Якоби, в этой матрице диагональные
элементы зависят от искомых переменных. Этим она отличается от матрицы ко-
эффициентов линейных уравнений. Анализ этой матрицы показывает, что струк-
тура ее, за исключением диагональных элементов, остается такой же, как и струк-
тура матрицы коэффициентов линейной системы уравнений узловых напряжений.
Это позволяет использовать в методе Ньютона все способы оптимизации решения,
применяемые для расчета режимов сложных энергосистем (учет разряженности,
симметрия матрицы коэффициентов и др.). С другой стороны, для решения ли-
неаризованных уравнений методом Ньютона не эффективно использование обрат-
ной матрицы, так как из-за зависимости диагональных элементов от значений пе-
ременных на каждом шаге итерации необходимо было бы обращать матрицу ко-
эффициентов, что значительно уступает по эффективности методу Гаусса с обрат-
ным ходом.
Систему нелинейных уравнений можно записать в следующем виде:
(
)
(
)
() ()
(
)
ii
i
UWU
U
UW
-=D
¶
¶
+1
. (4.37)
Тогда фактическое решение может быть записано следующим образом:

102
(
)
()
(
)
(
)
() ()
ú
û
ù
ê
ë
é
D+
D+
=
ú
û
ù
ê
ë
é
+
+
+
+
1
22
1
11
1
2
1
1
ii
ii
i
i
UU
UU
U
U
.
Итерационный процесс прекращается при выполнении условия:
(
)
(
)
e£
+
1i
UW .

103
5. МЕТОДЫ ОПТИМИЗАЦИИ РАСЧЕТОВ РЕЖИМОВ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
Современные электроэнергетические системы содержат большое количест-
во узлов, определяющее порядок системы уравнений при анализе режимов работы
этих систем. Решение систем уравнений высокого порядка требует значительного
времени и большого объема оперативной памяти ЭВМ, поэтому для повышения
эффективности необходимо применять специальные методы повышения скорости
расчетов и экономии оперативной памяти. В качестве таких методов можно рас-
смотреть эквивалентирование, разделение на подсистемы, учет слабой заполнен-
ности матриц коэффициентов уравнений состояния электрической сети и другие.
5.1. Приведение комплексных уравнений к системе действительных уравнений
Для цепи переменного тока узловые напряжения, токи в узлах, собственные
и взаимные проводимости узлов являются комплексными величинами. В этом
случае систему уравнений узловых напряжений при равенстве нулю напряжения
балансирующего узла можно записать в матричной форме в следующем виде:
ууу
I
=
U
Y
(5.1)
При решении на ЭВМ уравнения узловых напряжений для сети переменного
тока, как правило, приводятся к системе действительных уравнений порядка
n
2
,
где
-
n
число независимых узлов. Для этого представляют матрицы с комплекс-
ными элементами в виде сумм матриц с действительными элементами, при этом
нужно в виде такой суммы представить каждый комплексный элемент и учесть
правило сложения матриц:
ï
þ
ï
ý
ü
+=
+=
-=
уrуау
уrуа
у
ууу
j
j
j
III
UUU
ВGY
, (5.2)
где
-
у
G активная проводимость узла,
-
у
В реактивная проводимость узла,
-
уауа
I,U активные составляющие токов и напряжений,
-
уrуr
I,U реактивные составляющие токов и напряжений.
Подставляя (5.2) в (5.1), получим:
(
)
(
)
уrуауrуауу
jjj II
+
=
+
×
-
UUВG (5.3)
Произведя перемножение, запишем отдельно действительные и мнимые величи-
ны:
уауrууау
I
=
+
UВUG (5.4)
уrуrууау
I
=
+
-
UGUB (5.5)
104
Таким образом, cистему уравнений узловых напряжений для цепи перемен-
ного тока можно записать в матричной форме в следующем виде:
ú
û
ù
ê
ë
é
=
ú
û
ù
ê
ë
é
×
ú
û
ù
ê
ë
é
-
уr
уа
уr
уа
уу
уу
I
I
U
U
GВ
ВG
(5.6)
Система (5.6) и является системой действительных уравнений порядка
n
2
и
содержит
n
2
неизвестных активных и реактивных напряжений.
Эффект заключается в исключении операций с комплексными элементами.
5.2. Учет слабой заполненности матриц коэффициентов уравнений состояния
при расчетах установившихся режимов
Эффективность расчетов можно существенно повысить, если учесть нали-
чие и расположение нулевых элементов в матрице
у
Y . Эффект достигается за счет
того, что необходимо запоминать лишь ненулевые элементы, а также за счет ис-
ключения операций с нулевыми элементами. В результате экономится оператив-
ная память ЭВМ и повышается скорость расчетов. Ни одна из современных про-
грамм расчета установившихся режимов, в которой реализован метод Гаусса (как
наиболее удобный), не может быть эффективной, если в ней не предусмотрен
учет слабой заполненности матриц коэффициентов уравнений состояния.
Фактически задача сводится к такой форме записи уравнений состояния,
при которой ненулевые элементы матрицы узловых проводимостей будут сгруп-
пированы таким образом, чтобы в ходе решения системы линейных уравнений
методом Гаусса появилось как можно меньше новых ненулевых элементов. Такой
эффект достигается, если матрица коэффициентов приведена к ленточной форме.
Матрицей в ленточной форме называют такую, у которой ненулевые элементы
расположены в виде “ленты” вдоль главной диагонали матрицы.
Расположение ненулевых элементов матрицы уY определяется способом
нумерации узлов электрической системы. Проиллюстрируем способ нумерации
узлов на примере квадратной матрицы присоединений узлов, которая состоит из
нулей и единиц. Если узел
к
соединен с узлом
j
(то есть 0
¹
ку
Y ), то на пересе-
чении строки и столбца, соответствующих номерам узлов
к
и
j
стоит 1 (для уче-
та слабой заполненности знак перед единицей значения не имеет). Естественно,
диагональные элементы матрицы тоже равны единице. Таким образом, матрица
присоединений отличается от матрицы узловых проводимостей тем, что все нену-
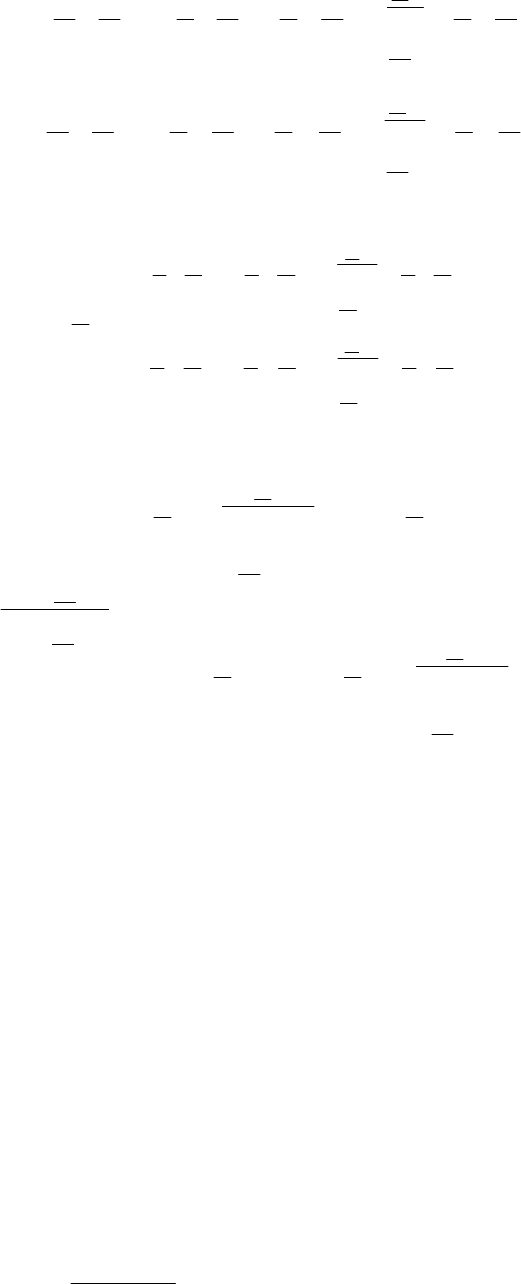
левые элементы заменены единицами. На рис. 5.1 показана схема с произвольной
нумерацией (рис.5.1, а) и соответствующая ей матрица присоединений (рис.5.1, б).
105
1
5
8
6
3
2
4
7
а) схема с произвольной нумерацией узлов
1
0
1
0
0011
0
1
0
1
0101
1
0
1
0
0101
0
1
0
1
1000
0
0
0
1
1010
0
1
1
0
0101
1
0
0
0
1010
1
1
1
0
0101
1
2
3
4
6
7
8
1
2
3
4
5
6
7
8
б) матрица присоединений при произвольной нумерации узлов
Рис.5.1
Как видно из рис.5.1, б, ненулевые элементы расположены в матрице при-
соединений в произвольном порядке.
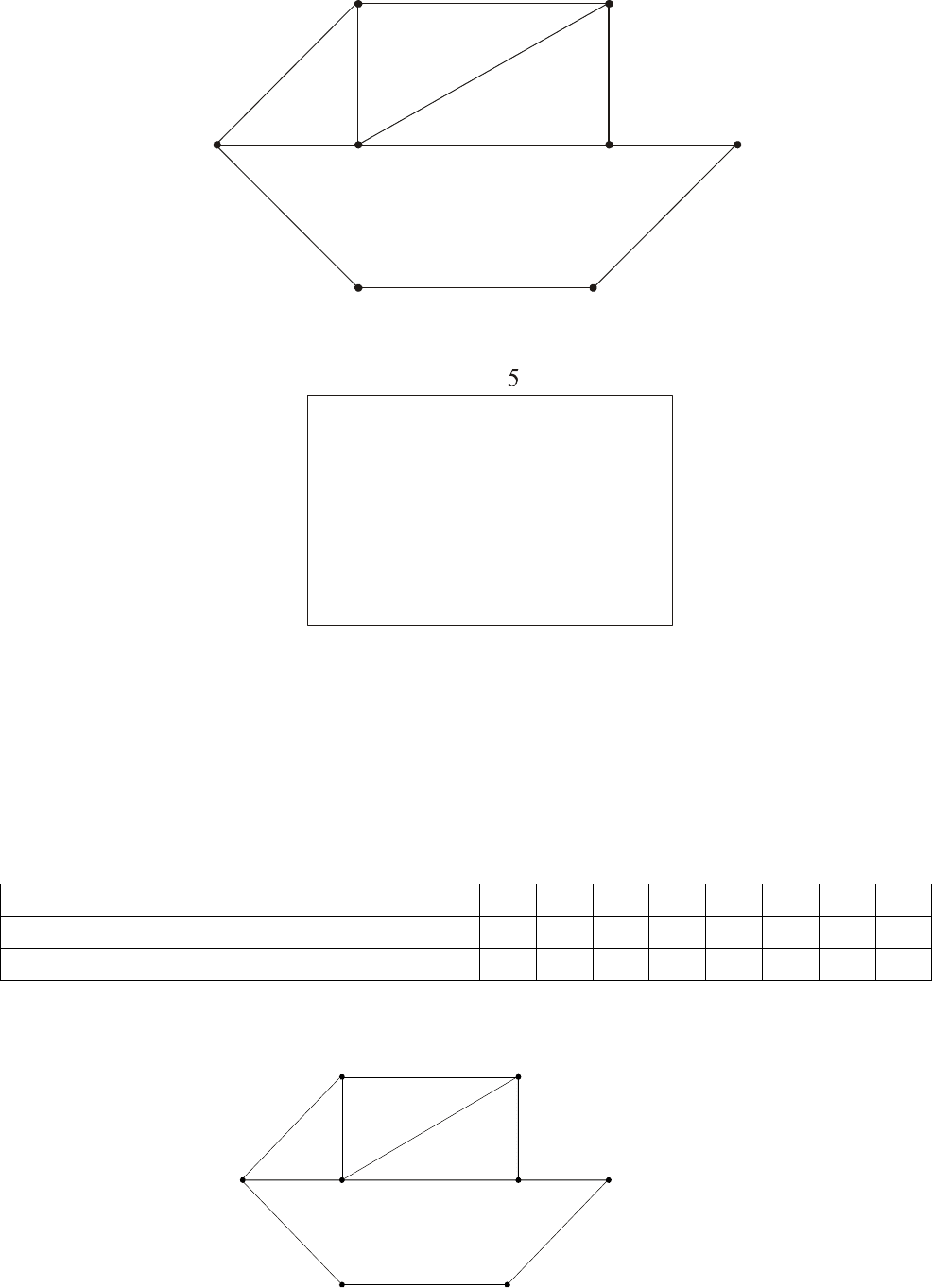
Пронумеруем узлы сети на рис.5.1, а таким образом, чтобы привести матри-
цу присоединений узлов к ленточной форме.
Для удобства составим табл. 5.1.
Таблица 5.1
Номер узла при исходной нумерации 1 2 3 4 5 6 7 8
Степень узла 4 2 3 2 2 3 3 3
Новая нумерация 6 1 8 2 4 5 7 3
Степенью узла называют число ветвей, присоединенных к данному узлу.
6
4
3
5
8
1
2
7
106
Первый номер присваивают узлу с минимальной степенью. Если таких узлов не-
сколько, то выбирают любой из них. Присвоим первый номер узлу 2. Далее в по-
рядке возрастания номеров уже пронумерованных узлов нумеруют смежные с ни-
ми непронумерованные узлы, причем нумерация ведется в порядке возрастания их
степеней, как показано на рисунке 5.2, а, б и в табл. 5.1.
а) новая нумерация
б) матрица присоединений узлов в ленточной форме
Рис.5.2
Как видно из рис. 5.2, б, ненулевые элементы матрицы присоединений
сгруппированы в результате такой нумерации вдоль главной диагонали в виде
“ленты”.
Этот способ нумерации, один из наиболее простых и эффективных при
применении метода Гаусса, достаточно легко реализуется на ЭВМ.
5.3. Эквивалентирование в расчетах установившихся режимов
электрических систем
Предположим, что необходимо проанализировать изменение режима при
изменении нагрузки в нескольких близко расположенных узлах. Это изменение
оказывает влияние не на всю электрическую систему из п узлов, а лишь на ее
часть, из
II
n узлов, причем
II
n <
n
. Во многих случаях на основании опыта расче-
тов и анализа режимов электрической системы с той или иной степенью точности
эту часть определить можно. Очевидно, что в рассматриваемом случае целесооб-
разно заменить всю систему из
n
узлов на некоторую эквивалентную систему из
II
n узлов, содержащую только те узлы, для которых необходимо проанализиро-
вать изменения параметров режима. После этого нужно рассчитать установив-
шийся режим только эквивалентной системы из
II
n узлов. Эффект от такого экви-
валентирования заключается в уменьшении числа узлов анализируемой электри-
ческой системы и, следовательно, в понижении порядка матрицы коэффициентов
уравнения состояния. Соответственно этому уменьшается объем требуемой опе-
ративной памяти ЭВМ и время расчета, упрощается анализ режима электрической
системы.
1
2
3
4
6
7
8
1
3
4
5
6
7
8
1
1
1
1
0
000
1
1
1
0
1
000
1
1
1
1
0
100
1
0
1
1
0
100
0
1
0
0
1
010
0
0
1
1
0
101
0
0
0
0
1
011
0
0
0
0
0
111
2
107
Схема считается эквивалентной, если в результате расчета ее режима опре-
деляются те же значения напряжений оставшихся в ней узлов, что и при расчете
исходной системы, то есть до эквивалентирования. Остальные узлы исключаются,
и напряжения в них не могут быть определены в результате расчета эквивалент-
ной системы. Обычно при эквивалентировании предполагают, что в качестве ак-
тивных элементов схема содержит только задающие токи, а все ЭДС ветвей пред-
полагаются предварительно замененными эквивалентными задающими токами.
Рассмотрим эквивалентирование на примере матрицы узловых проводимо-
стей. Число независимых узлов и порядок матрицы
у
Y равен
n
. В эквивалентной
системе содержится
II
n независимых узлов, а при эквивалентировании исключа-
ется
I
n узлов, причем
II
I
nnn
-
=
.
Разобьем матрицу проводимостей и матрицы-столбцы узловых напряжений
и задающих токов на блоки, соответствующие эквивалентной системе и исклю-
ченной части. Запишем уравнение узловых напряжений :
ú
û
ù
ê
ë
é
=
ú
û
ù
ê
ë
é
×
ú
û
ù
ê
ë
é
II
I
II
I
II-III-II
II-II-I
у
у
I
I
U
U
YY
YY
. (5.7)
В этом уравнении
II
-
II
Y - матрица собственных и взаимных проводимостей узлов
эквивалентной системы;
II
U ,
IIу
I - матрицы-столбцы узловых напряжений и за-
дающих токов эквивалентной системы;
I
-
I
Y ,
I
U ,
Iу
I включают в себя узловые
проводимости, напряжения и задающие токи узлов исключаемой части системы.
II
-
I
Y состоит из взаимных проводимостей узлов, входящих в эквивалентную и ис-
ключаемую системы. Это – проводимости ветвей, соединяющих узлы эквивалент-
ной и исключаемой системы.
Произведем формальное перемножение матриц в выражении (5.7) и запи-
шем результат в виде двух матричных уравнений:
ï
þ
ï
ý
ü
=+
=+
IIIIII-IIII-II
IIIII-III-I
у
у
I
I
UYUY
UYUY
(5.8)
Из первого уравнения системы (5.8) выразим напряжения исключаемых узлов че-
рез напряжения эквивалентной системы:
(
)
IIII-II
1-
I-II
UYYU -=
у
I (5.9)
Подставив (5.9) во второе уравнение системы (5.8), получим уравнение узловых
напряжений только для эквивалентной системы:
(
)
IIIIII-IIIIII-II
1
I-II-II уу
II =+-
-
UYUYYY (5.10)
Раскрыв скобки и перенеся первое слагаемое в правую часть, получим:
(
)
I
1
I-II-IIIIIIII-I
1
I-II-IIII-II уу
II
-
-
-=×- YYUYYYY (5.11)
В матричном виде можно записать:
уээ
I
=
II
UY , (5.12)
108
где матрица узловых проводимостей и матрица задающих токов эквивалентной
системы определяются следующими выражениями:
II
-
I
1
I
-
I
I
-
II
II
-
II
YYYYY ××-=
-
э
, (5.13)
I
1
I-II-IIII уууэ
III ××-=
-
YY (5.14)
Последние слагаемые в правой части выражений (5.13) и (5.14) отражают влияние
исключенной части на напряжения и задающие токи узлов эквивалентной систе-
мы.
В основе рассмотренного упрощенного способа эквивалентирования факти-
чески лежит метод исключения переменных.
Для того, чтобы добиться совпадения не только напряжений в узлах, но и
потерь мощности, необходимо использовать более сложные способы эквивален-
тирования.
5.4. Разделение на подсистемы
Этот метод эффективно используется в расчетах установившихся режимов
сложных электрических систем.
Суть метода заключается в том, чтобы рассчитать режим работы системы по
частям. Основное отличие разделения на подсистемы от эквивалентирования со-
стоит в том, что при эквивалентировании рассчитывается установившийся режим
только эквивалентной системы, а напряжения исключенных узлов не определяют-
ся; при разделении на подсистемы определяются напряжения всех узлов системы.
Методы расчета по частям получили название диакоптики.
Эффект от разделения заключается в том, что для каждой подсистемы ре-
шается меньшее количество уравнений с меньшим числом неизвестных, благода-
ря чему достигается экономия оперативной памяти ЭВМ, во многих случаях
уменьшается время расчета.
При разделении на подсистемы раздельно рассчитывается режим в каждой под-
системе и определяются “граничные” переменные, т.е. параметры режима гра-
ничных линий или узлов, которые принадлежат двум или более подсистемам.
Как при эквивалентировании, так и при разделении на подсистемы факти-
чески матрица
у
Y представляется в блочной форме, т.е. разделенной на подмат-
рицы, и при расчете режима операции ведутся лишь с этими подматрицами. Раз-
деление на подсистемы целесообразно выполнять так, чтобы подматрицы
II
-
I
Y и
I
-
II
Y в выражении (5.7) состояли из нулей.
В этом случае выражение (5.8) значительно упрощается, и можно независи-
мо определять параметры режима подсистем I и II.
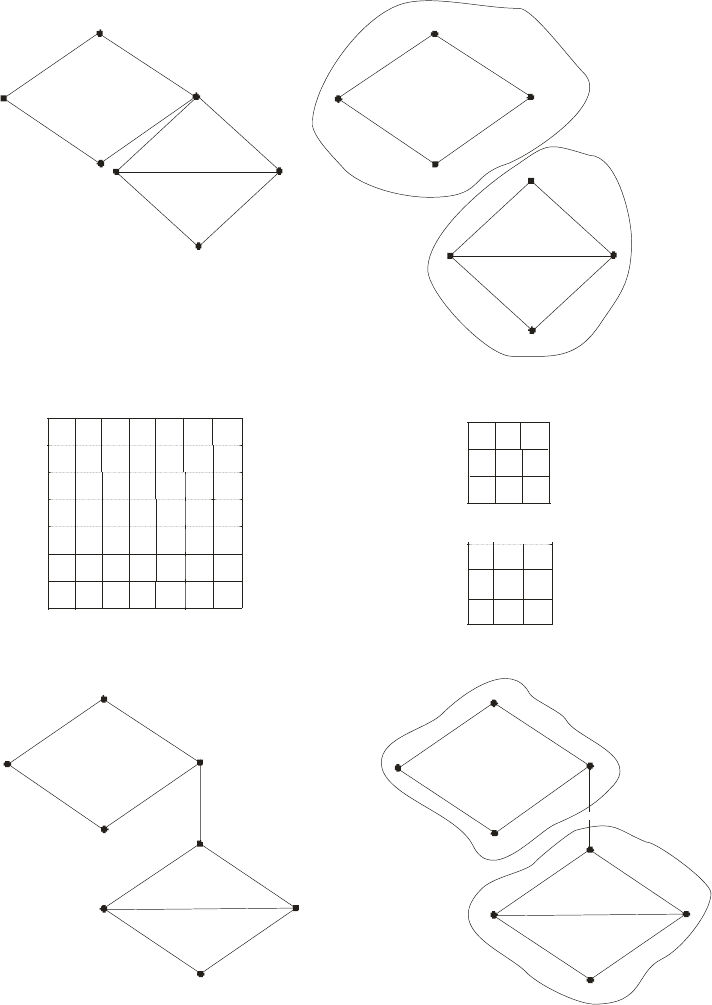
Такое разделение возможно лишь в частном случае, когда две подсистемы
питаются от одного балансирующего узла, но не связаны между собой. Такой слу-
чай показан на рис.5.3, а.
109
Можно показать, что при разделении сети на рис.5.3,а на подсистемы I и II
(рис.5.3, б) матрица присоединений сети приводится к блочно-диагональной фор-
ме. Матрицей в блочно-диагональной форме называют такую, которая состоит из
матриц-блоков, расположенных по диагонали.
2
3
4
7
5
6
БУ
а)
2
3
7 БУ
1
6
4
7
5
БУ
I
II
б)
2
8
1
3
4
7
5
6
4
7
5
6
2
8
1
3
д)
е)
1
1
1
1
1
1
11
1
1
1
1
1
1
1
11
1
1
11
1
1
1
11
1
2
2
3
3
4
4
5
5
6
6
7
7
в)
11
1
11
1
11
1
4
4
5
5
6
6
I
II
1
1
1
1
1
1
11
1
2
2
3
3
г)
Рис.5.3 Разделение на подсистемы, приводящие матрицу
присоединения узлов к блочно-диагональной форме:
а – граф сети; б – разделение на подсистемы; в – матрица присоединений исходной сети;
г – матрицы присоединения подсистем; д – подсистемы, соединенные
граничной ветвью; е – разделение этих подсистем
Для иллюстрации составим матрицу присоединений сети. Вначале пронуме-
руем узлы первой подсистемы, затем второй. Граничные узлы нумеруются в по-
110
следнюю очередь. Разделим схему по граничному узлу 7. На рис. 5.3,в приведена
матрица присоединения узлов в блочно-диагональной форме. Здесь ненулевые
элементы матрицы присоединения сгруппированы в отдельные квадратные мат-
рицы-клетки (блоки), расположенные вдоль диагонали. Они окаймляются нуле-
выми элементами, не вошедшими в эти клетки (для схемы на рис.5.3,а это элемен-
ты, соответствующие связям узла 7 со всеми остальными узлами). Решение систе-
мы уравнений с такой матрицей можно свести к независимому решению подсис-
тем I и II (рис.5.3, г), которым соответствуют матрицы-клетки, расположенные
вдоль главной диагонали. Очевидно, что решать две независимые системы урав-
нений 3-го порядка для подсистем I и II проще, чем систему 6-го порядка для ис-
ходной сети.
При разделении электрической системы, например, на две подсистемы на-
пряжения узлов в каждой из них определяются пассивными и активными элемен-
тами своей подсистемы, влиянием пассивных и активных элементов другой под-
системы.
Допустим, что с точки зрения оптимизации расчетов режимов электрическая
система разделена на две подсистемы I и II. Установившийся режим этих двух
подсистем описывается соответственно первым и вторым уравнением (5.8). Как
видно из этих уравнений, влияние пассивных и активных элементов подсистемы II
на подсистему I определяется вторым слагаемым в левой части первого уравнения
(5.8), а влияние подсистемы I на напряжения подсистемы II определяется первым
слагаемым во втором уравнении (5.8). В эти матричные слагаемые входят прово-
димости ветвей, соединяющих узлы подсистемы I и II.
Алгоритмы расчета установившегося режима при разделении на подсисте-
мы могут быть различны. Например, полагая, что узловые напряжения подсисте-
мы II известны (например, равны начальным приближениям), можно определить
по методу Зейделя узловые напряжения подсистемы I из первого уравнения (5.8).
Затем по методу Зейделя можно определить напряжения подсистемы II из второго
уравнения (5.8), предположив, что узловые напряжения подсистемы I
I
U равны
только что найденным и так далее. По данному алгоритму несложно организовать
циклический итерационный процесс.