Вафин Д.Б. Задания по физике
Подождите немного. Документ загружается.

Центром инерции системы материальных точек называют такую
точку С, радиусвектор которой определяется по формуле:
r
c
=
n
i
i
n
i
ii
m
m
1
1
r
=
n
i
ii
m
m
1
1
r ,
где m
i
, r
i
– масса и радиус-вектор i-й точки системы, m – общая масса
всей системы.
Если тело можно было бы шарнирно закрепить в центре инерции,
то оно оставалось бы в состоянии равновесия при любом повороте.
Импульс системы равен произведению массы всей системы на
скорость ее центра инерции:
р =
n
i
i
1
р = mv
c
.
Изучая движение небесных тел и па-
дение тел в земных условиях, Ньютон ус-
тановил, что две материальные точки
притягиваются друг к другу с силой F,
пропорциональной их массам m
1
, m
2
и об-
ратно пропорциональной квадрату рас-
стояния r между ними:
F =
2
21
r
m
m
.
Закон Всемирного тяготения в векторной форме:
F
21
= –
3
21
r
mm
r
21
.
Здесь F
21
– сила, действующая на m
2
со стороны m
1
(Рис. 4); r
21
– ради-
ус–вектор m
2
относительно m
1
; r = r
21
;
= 6,6710
–11
Нм
2
/кг
2
– грави-
тационная постоянная. Знак « – » показывает, что F
21
и r
21
имеют про-
тивоположные направления.
Сила тяжести: F
т
= mg, где g – ускорение свободного падения.
Пусть под действием внешней силы F упругое тело деформиру-
ется (рис. 5); l
o
– начальный размер, l
конечный размер; x = l – l
o
–
величина деформации.
10
m
1
F
12
F
21
m
2
r
21
Рис. 4
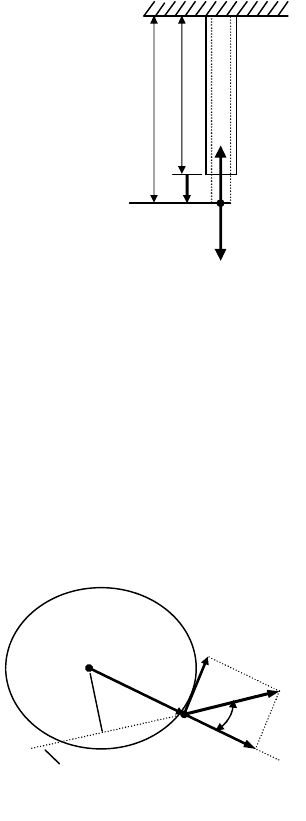
За счет смещения узлов кристаллической
решетки возникает сила упругости F, препятст-
вующая внешней силе F
.
Если после прекращения внешнего воздей-
ствия тело восстанавливает первоначальные раз-
меры и форму, то деформация называется абсо-
лютно упругой.
При абсолютно упругой деформации сила
упругости F, возникающая при малых деформа-
циях, пропорциональна деформации тела х:
F = k x , (закон Гука)
где k – коэффициент упругости.
Знак минус показывает, что сила упругости
направлена в сторону, противоположную на-
правлению деформации.
Иногда закон Гука представляют в относительной форме:
,
где = F/S – нормальное напряжение; S – площадь поперечного сече-
ния тела;
= х /l
o
– относительная деформация; Е – модуль упругости,
характеризующая упругие свойства тела (вещества).
Коэффициент упругости кроме свойств тела зависит и от его гео-
метрических параметров. Например, для стержня:
k = ES/l
o
.
Момент инерции системы N материальных точек определяет
инертность тела при вращательном движении:
J = m
r
i
i
N
i
1
2
,
где r
i
– расстояние от i
й материаль-
ной точки массой m
i
до оси враще-
ния О.
Момент инерции цилиндра
J = m R
2
/2.
Вращающий момент силы относи-
тельно оси О (рис. 6)
M = r F
r sin
F = h F,
где h = r sin
плечо силы F, кратчайшее расстояние от оси вра-
щения до линии действия силы F (ось перпендикулярна чертежу).
11
l l
o
F
x
F
Рис. 5
F
O ось
r F
h
А
F
r
Линия действия силы
Рис. 6
Закон динамики вращательного движения
M = J β
=
dt
dL
,
где L = J
ω
момент импульса тела, вектор, направленный вдоль
ω
.
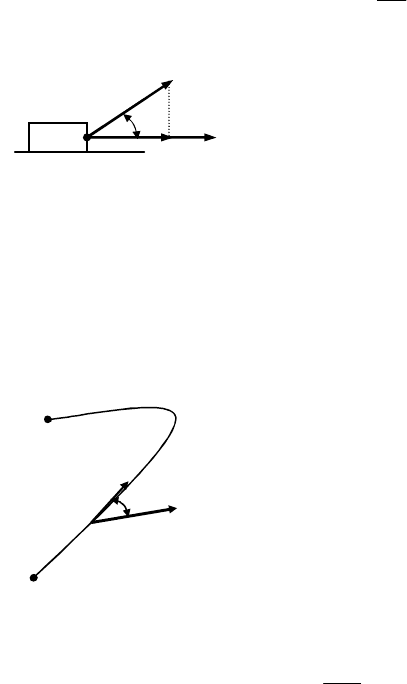
Пусть под действием силы F тело m
массой совершает перемещение l (рис. 7).
Очевидно, что перемещение тела обуслов-
лено только касательной (тангенциальной) к
траектории составляющей силы F
:
F
= F cos
.
Работой силы называется физическая величина, равная произве-
дению тангенциальной составляющей силы F
на перемещение l:
A = F
l = F cos
l = Fl, Дж,
где F
проекция силы F на направление перемещения l,
угол
между направлениями силы и перемещения.
Работа постоянного вращающего момента
А = М .
Работа переменной силы, совершаемая при
перемещении тела из точки 1 в точку 2 (Рис. 8) ,
равна сумме элементарных работ на отдельных
бесконечно малых участках пути. Эта сумма
приводит к интегралу:
А =
N
1i
iii
N
lαF Δcos
lim
=
2
1
dl αF cos
.
Мгновенной мощностью силы F называется
физическая величина, численно равная работе,
совершаемой этой силой за единицу времени:
N =
d
dt
A
, Вт.
Энергия является физической величиной, служащей единой мерой
различных форм движения материи.
Энергия механической системы характеризует эту систему с точ-
ки зрения возможных в ней количественных и качественных превра-
щений движения. Эти превращения обусловлены взаимодействием тел
системы как между собой, так и внешними телами.
12
F
m
l
F
Рис. 7
2
l
i
F
i
1
Рис.
8
Механическая энергия складывается из кинетической и потенци-
альной энергии:
W = W
к
+ W
п.
Кинетическая энергия это энергия движущегося тела, равняется
работе, которую может совершить тело при его торможении до пол-
ной остановки.
Кинетическая энергия поступательно движущегося тела опреде-
ляется по формуле:
W
к
=
2
2
m
.
Если работа силы затрачивается только на изменение кинетиче-
ской энергии тела, то имеет место соотношение:
2
1
dlFcos
= W
К2
– W
К1.
Кинетическая энергия тела, вращающегося относительно непод-
вижной оси:
2
2
вр
к
J
W
,
где J – момент инерции тела,
угловая скорость.
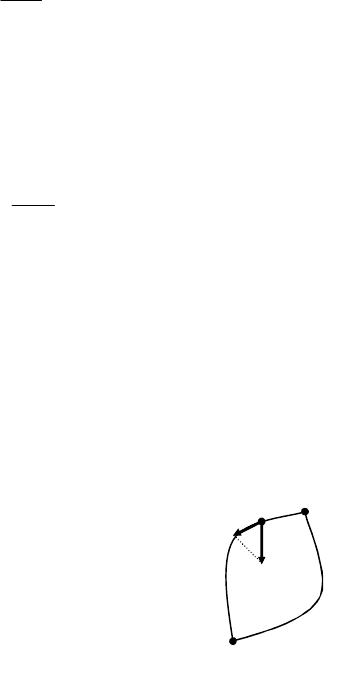
Если тело в каждой точке пространства подвержено воздействию
других тел, то говорят, что это тело находится в силовом поле.
Силу F, действующую на материальную точку называют консер-
вативной или потенциальной, если работа А
1–2
, совершаемая этой си-
лой при перемещении материальной точки из одного положения 1 в
другое положение 2, не зависит от того, по какой траектории это пе-
ремещение произошло(рис. 9):
А
1–а–2
= А
1–b–2
= А
1–2
.
Все силы, не удовлетворяющие этому условию,
называются неконсервативными, или диссипатив-
ными.
Если на систему тел действуют консервативные
силы, то можно ввести понятие потенциальной энер-
гии этой системы. Работа перемещения А
1–2
в поле
консервативных сил полностью определяется на-
чальной и конечной состояниями системы. Поэтому
ее можно выразить как разность значений некоторой
функции состояния системы W
п
(x,y,z), зависящей
13
1
F
a F
b
2
Рис. 9
только от координат всех материальных точек системы:
А
1–2
= W
П1
– W
П2
.
Эту функцию называют потенциальной энергией системы.
Из данного соотношения следует, что работа консервативных сил,
действующих на механическую систему, равна убыли потенциальной
энергии этой системы при переходе из состояния 1 в состояние 2.
Для определенности, в каком-то состоянии потенциальную энер-
гию системы считают равной нулю. Пусть потенциальная энергия пе-
ремещаемого тела равна нулю для состояния 2: W
П2
= 0. Тогда потен-
циальная энергия этого тела в произвольном состоянии 1:
W
П1
= A
1–2
.
Потенциальная энергия тела обусловлена взаимодействием этого
тела с другими телами системы (нахождением тела в поле консерва-
тивных сил) и численно равняется работе, которую совершают силы
поля, перемещая тело из данного состояния в состояние, в котором
потенциальная энергия тела равна нулю.
Потенциальную энергию можно представить как энергию, запа-
сенную для дальнейшего использования.
Например, работа перемещения тела под действием силы тяже-
сти зависит лишь от разности высот h перемещаемого тела и не зави-
сит от формы траектории движения: A
1–2
= m g (h
1
– h
2
).
Если считать, что потенциальная энергия равняется нулю при
высоте h
2
= 0, то потенциальная энергия под действием силы тяжести:
W
п
(h) = m g h.
Здесь m – масса тела, g – ускорение свободного падения, h – вы-
сота тела относительно уровня, где потенциальная энергия считается
равной нулю.
Из определений кинетической и потенциальной энергий следует,
что единица измерения энергии совпадает с единицей измерения ра-
боты: [W] = [A] = Дж.
Потенциальная энергия упругодеформированного тела
W
п
= kx
2
/2,
где k – коэффициент упругости, х – абсолютная деформация.
Удар
это кратковременное контактное взаимодействие тел.
Абсолютно упругим называется удар, в результате которого
сохраняется суммарная кинетическая энергия тел.
14
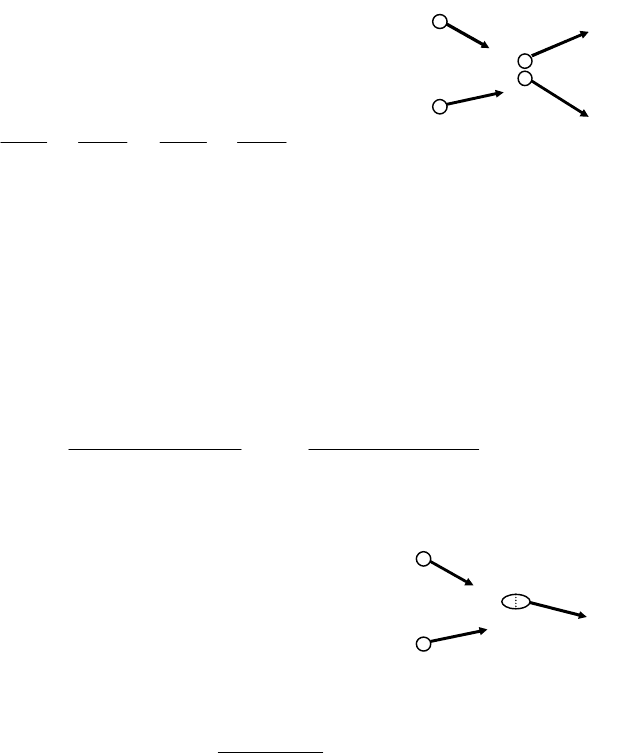
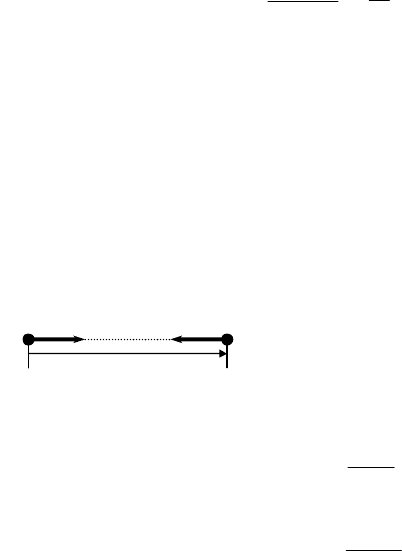
Пусть v
1
, v
2
скорости шаров с массами m
1
и m
2
до удара; u
1
, u
2
–
скорости после удара (рис. 10). Непосредст-
венно при ударе потенциальная энергия шаров
не изменяется. Поэтому сумма кинетических
энергий шаров после удара равняется сумме
кинетических энергий до удара:
2
2
11
vm
+
2
2
22
vm
=
2
2
11
um
+
2
2
22
um
.
Для системы из двух шаров закон сохранения импульса:
m
1
v
1
+ m
2
v
2
= m
1
u
1
+ m
2
u
2
.
Удар называется центральным, если до удара центры инерции тел
двигались по одной прямой. Тогда и после удара центры инерции бу-
дут двигаться вдоль этой же прямой. Для такого удара векторное
уравнение закона сохранения импульса вдоль этой прямой можно за-
писать в алгебраической форме.
Из системы уравнений законов сохранения кинетической энергии
и импульса можно получить формулы для скоростей шаров после
центрального удара:
u
1
=
21
22121
2)(
mm
mmm
vv
; u
2
=
21
11212
2)(
mm
mmm
vv
.
Абсолютно неупругим называется удар, в результате которого
скорости соударяющихся тел становятся одинаковыми и они дви-
жутся как одно целое со скоростью u
(рис.11). При таком ударе закон сохранения
механической энергии не выполняется. Часть
механической энергии затрачивается на ра-
боту деформации шаров и выделяется в виде
теплоты. Закон сохранения импульса выпол-
няется:
m
1
v
1
+ m
2
v
2
= (m
1
+ m
2
)u .
Отсюда скорость шаров после удара:
u =
21
2211
mm
m
m
v
v
.
Надо иметь в виду, что это векторное выражение.
Теплота, которая выделяется при неупругом ударе, равняется
разности кинетических энергий шаров до и после удара:
15
m
1
u
1
v
1
m
1
v
2
m
2
m
2
u
2
Рис. 10
m
1
v
1
(m
1
+m
2
)
v
2
u
m
2
Рис. 11
Q =
2
2
11
vm
+
2
2
22
vm
2
)(
2
21
umm
Второй закон Ньютона в неинерциальных системах отсчета
m a = F + F
ин
,
где F равнодействующая реальных сил; a ускорение тела относи-
тельно неинерциальной системы; F
ин
равнодействующая сил инер-
ции. Силы инерции вызваны ускоренным движением системы отсчета
и направлены противоположно ускорению системы а
о
:
F
ин
= m а
о
.
1.2. Примеры решения и оформления задач
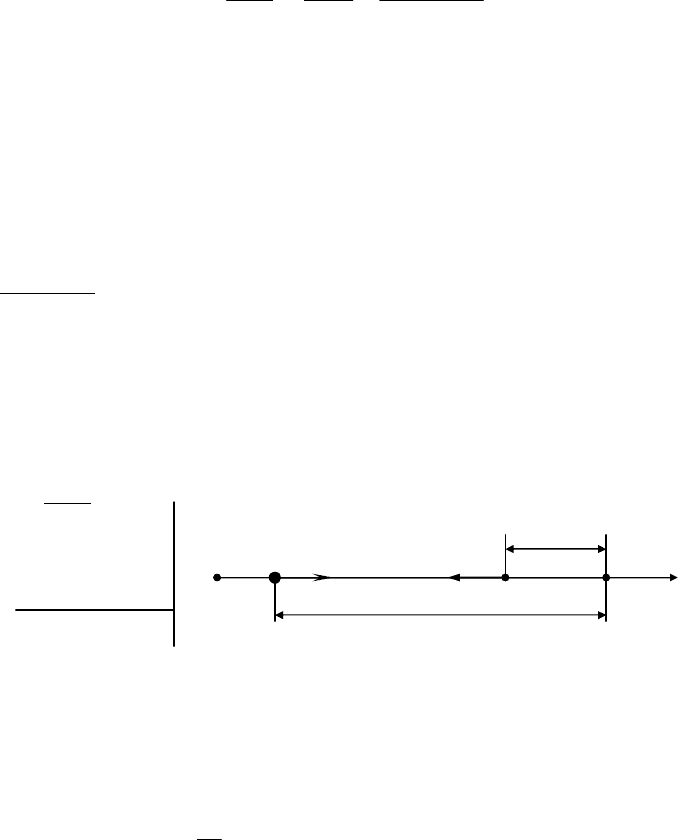
Пример 1.
Материальная точка массой m = 10 г движется вдоль горизон-
тальной прямой и ее координата с течением времени меняется соглас-
но закону x = a + bt + ct
2
. Здесь, а = 5 м, b = 20 м/c, c = 5 м/c
2
. Опре-
делить мгновенные скорости частицы в моменты времени t
1
= 1 c и
t
2
= 4 c, силы, действующие на частицу в данные моменты времени,
среднюю путевую скорость в промежутке времени от t
1
до t
2
.
Анализ:
В начальный момент времени t
o
= 0 частица находится в точке с
координатой х
о
= 5 м, как показано на рисунке.
Мгновенная скорость частицы в любой момент времени опреде-
ляется как первая производная от радиус-вектора частицы по времени.
По условиям задачи частица движется вдоль координатной оси х. По-
этому в данном случае мгновенная скорость совпадает с составляю-
щей скорости вдоль данного направления:
=
dt
dx
x = (5 + 20t – 5t
2
) = 20 – 10t.
16
Дано
:
m =10г =0,01кг
x = 5+20t–5t
2
t
1
= 1 c
t
2
= 4 c
1
,
2
, F
1
,F
2
,
ср
S
1
0 t
o
v
o
F t
1
t
п
х
t
2
S
2
Силу, действующую на частицу, можно определить по второму
закону Ньютона: F = ma. Ускорение определяем, взяв производную от
выражения для мгновенной скорости по времени: а =
= (20 – 10t) =
= 10 м/c
2
.
Как видно ускорение от времени не зависит и имеет отрицатель-
ное значение. Это говорит о том, что ускорение направлено противо-
положно направлению оси х и начальному направлению скорости,
поэтому через некоторое время от начала движения направление дви-
жения изменится. Это произойдет в момент времени t
п
, когда скорость
будет равняться нулю. Данный момент времени можем найти, при-
равняв выражение для скорости нулю:
20 – 10t
п
= 0, отсюда t
п
= 20/10 = 2 с.
Значит, общий путь будет равняться сумме путей в прямом S
1
и в
обратном S
2
направлениях: S = S
1
+ S
2
.
Средняя скорость по пути определяется как отношение общего
пути S к промежутку времени t = t
2
– t
1
, в течение которого этот путь
пройден:
ср
= S /t.
Анализ размерности:
Как видно из условия задачи коэффициенты в уравнении движе-
ния частицы являются размерными величинами, которые обеспечива-
ют единицу измерения координаты частицы в метрах: [х] = м.
[] = [х] /[t] = м/с. [F] = [m][a] = кгм/с
2
= Н(ньютон).
Решение:
1
=20 – 10t
1
= 20 – 101 = 10 м/с.
2
=20 – 10t
2
= 20 – 104 = - 20 м/с.
F
1
= F
2
= ma = 0,01(–10) = - 0,1 H.
S
1
= x(t
п
) – х(t
1
) = 5+20t
п
–5t
2
п
– (5+20t
1
–5t
2
1
) = 5 м.
S
2
= x(t
п
) – х(t
2
) = 5+20t
п
–5t
2
п
– (5+20t
2
–5t
2
2
) = 20 м.
ср
= S/t =(S
1
+ S
2
)/(t
2
– t
1
) = (5 + 25)/(4 – 1) = 10 м/с.
Ответ:
Мгновенная скорость в момент времени t
1
= 1 с:
1
=10 м/с.
Мгновенная скорость в момент времени t
2
= 4 с:
2
= –20 м/с.
Сила, действующая на частицу: F
1
= F
2
= 0,1 H. Сила направлена
противоположно направлению начальной скорости.
Средняя скорость по пути за промежуток времени за промежуток
времени от t
1
до t
2
:
ср
= 10 м/с.
17
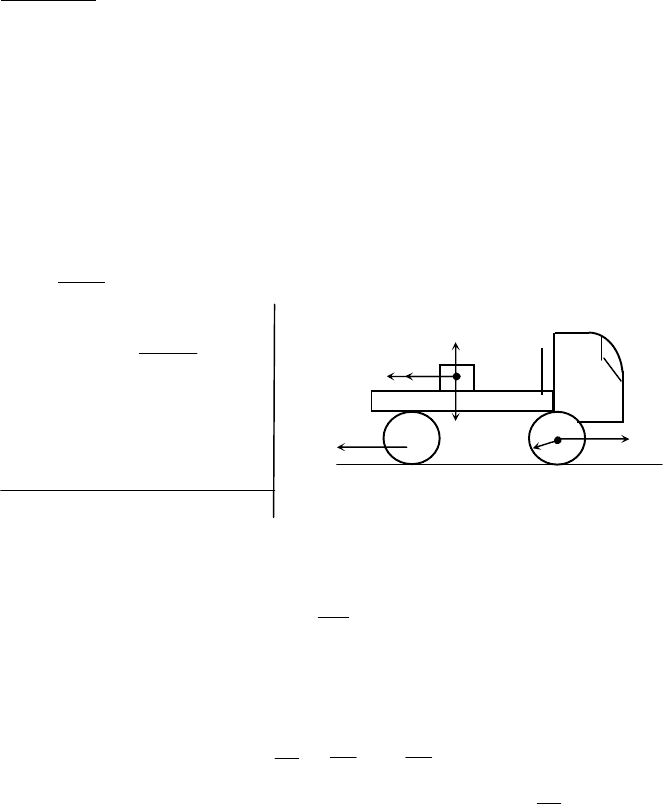
Пример 2.
Автомобиль массой М = 3 т, двигаясь с постоянной скоростью
= 61,2 км/ч, начал экстренное торможение и остановился, проехав
путь l = 50 м. Определить результирующую силу трения, действую-
щую на колеса автомобиля. Удержится ли на месте груз, находящийся
на кузове автомобиля, если коэффициент трения груза о днище кузова
= 0,2? Если колесо автомобиля приближенно представить в виде
сплошного диска массой m = 50 кг, то какой кинетической энергией
обладало одно колесо до начала торможения? Сколько оборотов сде-
лает колесо до полной остановки, если радиус колеса R = 34 см.
Дано: Анализ:
М = 3т = 3000 кг
=61,2 км/ч =
3600
61200
= 17м/с
l = 50 м
= 0,2
R = 34 см = 0,34 м
m = 50 кг
F
тр
, W, F
тр2
, W
к
, N
Предположим, что автомобиль тормозится с постоянным ускоре-
нием а. Тогда формула для тормозного пути
l =
t
2
2
at
. (1)
В этой формуле неизвестно время торможения t. Для его опреде-
ления воспользуемся формулой для скорости при равнопеременном
движении
к
=
+ at, так как конечная скорость равняется нулю
к
= 0: t =
/a. Подставим это выражение в формулу (1):
l =
а
2
+
а
2
2
=
а
2
2
.
Отсюда получаем формулу для ускорения а =
l2
2
.
Численное значение ускорения получается отрицательным, т.к. авто-
мобиль тормозится. Значение силы торможения можно определить
18
N
F
тр2
a m
г
F
тр
F
т
v
R
из второго закона Ньютона. Во время торможения на автомобиль дей-
ствуют только силы трения колес, поэтому
F
тр
= Ma =
l
М
2
2
.
Если груз, находящийся в кузове автомобиля не скользить отно-
сительно автомобиля, то будет замедляться с таким же ускорением а,
что и автомобиль. Силой торможения для груза массой m
г
является
сила трения, значение которой можно определить по второму закону
Ньютона
F
т
= m
г
a =
l
m
2
2
г
.
Максимальное значение силы трения F
тр2
=
m
г
g. В данном
случае на груз в вертикальном направлении действуют только сила
тяжести F
т
= m
г
g и сила реакции опоры N, поэтому N = m
г
g .
Груз не будет скользить, если выполнится условие
F
тр2
F
т
или
g
l2
2
.
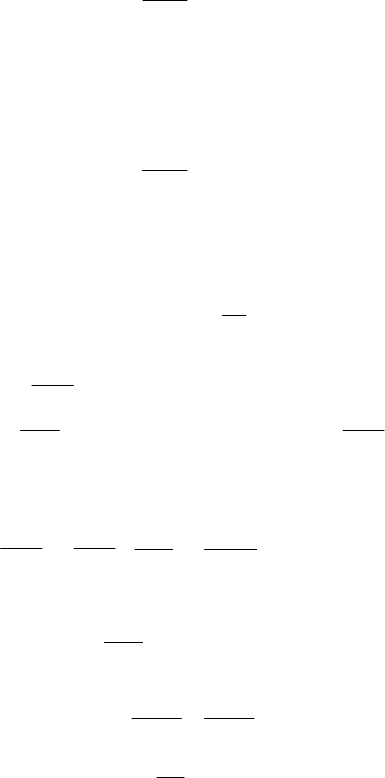
Катящееся колесо обладает как кинетической энергией поступа-
тельного движения W
кп
=
2
2
m
, так и кинетической энергией враща-
тельного движения W
к
вр
=
2
2
J
. Момент инерции диска J =
2
2
mR
.
Угловая скорость колеса связана со скоростью поступательного
движения
= /R (предполагаем, что колесо не скользит на дороге).
В результате полная кинетическая энергия колеса
W
к
=
2
2
m
+
2
2
mR
2
2
2
R
=
4
2
3m
.
Число полных оборотов колеса можно найти, разделив тормоз-
ной путь на длину окружности обода колеса
N =
R
l
2
.
Анализ размерности:
[F
тр
] = [M][]
2
/[l] = кг Н
с
мкг
м
с
м
22
2
[W
к
] = [m][]
2
= кг
2
2
с
м
= Дж
[N
] = [l
]/[R] = м/м – безразмерная величина.
19