Русаков В.С. и др. Механика. Методика решения задач
Подождите немного. Документ загружается.

Глава 6. Кинематика и динамика абсолютно твердого тела
201
Решение
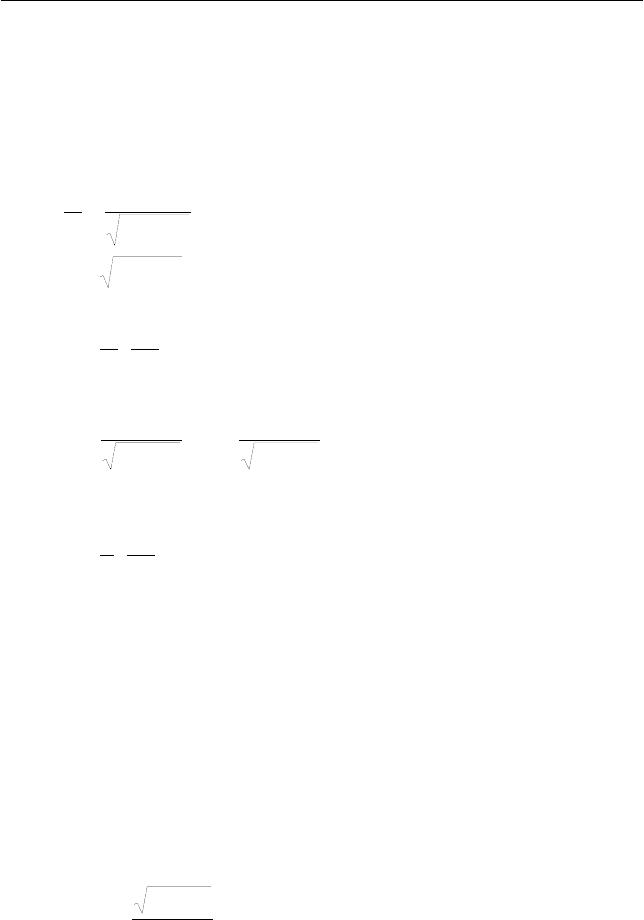
I. Выберем лабораторную инерциальную систему отсчета,
связанную с горизонтальной поверхностью. Направим оси X и Y
декартовой системы координат так, как показано на рис. 6.5.
Плоское движение колеса в течение бесконечно малого ин-
тервала времени можно представить, как "чистый" поворот относи-
тельно мгновенной оси вращения, перпендикулярной плоскости
движения и проходящей через точку пересечения прямых, перпен-
дикулярных скоростям движения материальных точек колеса (см.
п. 6.1. Теоретический материал). Поскольку при движении колеса
не происходит его отрыва от горизонтальной поверхности, то ско-
рость нижней точки обода колеса, которая соприкасается с поверх-
ностью, может быть направлена только вдоль поверхности. Следо-
вательно, мгновенная ось вращения проходит через одну из точек
вертикального диаметра
колеса. В общем случае мгновенная ось
вращения может находиться как выше, так и ниже поверхности, по
которой катится колесо.
Пусть
y
М
– координата мгновенной оси вращения (см.
рис. 6.5) в лабораторной системе отсчета. Для удобства решения
задачи введем вторую систему отсчета, движущуюся поступатель-
но вместе с центром колеса со скоростью
0
υ
относительно лабора-
торной системы, с осями координат, параллельными осям лабора-
торной системы координат X и Y.
II. При решении задачи воспользуемся формулой (6.2), свя-
зывающей скорости материальной точки в лабораторной и движу-
щейся системах отсчета (см. п. 6.1. Теоретический материал). В
движущейся со скоростью
0
υ
системе отсчета модули скоростей
точек обода колеса A и B одинаковы и равны
R
ω
. Для модулей
этих скоростей относительно лабораторной системы отсчета можно
записать (см. рис. 6.5):
R
ω
υ
υ
+
=
0A
, (6.49)
22
2
0B
R
ωυυ
+= . (6.50)
Здесь и далее положительным значениям
ω
соответствует враще-
ние колеса по часовой стрелке.
Воспользуемся очевидными геометрическими соотношения-
ми (см. рис. 6.5):
МЕХАНИКА. МЕТОДИКА РЕШЕНИЯ ЗАДАЧ
202
0
tg
υ
ω
α
R
=
, (6.51)
M
tg
yR
R
−
=
α
, (6.52)
где
α
– угол между скоростью точки B и направлением движения
центра колеса.
III. Преобразуя систему уравнений (6.49) и (6.50) получаем
уравнение относительно угловой скорости вращения колеса
ω
:
0
2
2
2
B
2
AA
2
=
−
+−
R
R
υυυ
ωω
. (6.53)
Решая полученное квадратное уравнение, получаем два зна-
чения угловой скорости:
2
A
2
B
A
2,1
2
2
1
2
υυ
υ
ω
−±=
RR
. (6.54)
По условию задачи
AB
5
υ
υ
=
, следовательно:
R
A
1
4
υ
ω
= и
R
A
2
3
υ
ω
−= . (6.55)
Согласно (6.49) этим значениям угловой скорости вращения
колеса соответствуют два значения скорости центра колеса:
A01
3
υ
υ
−
=
и
A02
4
υ
υ
=
. (6.56)
Используя (6.51) и (6.52) для координаты мгновенной оси
вращения получаем следующее выражение:
ω
υ
0
M
−= Ry . (6.57)
Подставляя (6.55) и (6.56) в (6.57), получаем два значения коорди-
наты мгновенной оси вращения:
Ry
4
7
M1
= и Ry
3
7
M2
= . (6.58)
Итак, задача имеет два решения.
1. Скорость центра колеса направлена в отрицательном на-
правлении оси X, вращение колеса происходит по часовой стрелке,
мгновенная ось вращения расположена на вертикальном диаметре
ниже точки A, но выше центра колеса (см. рис. 6.6):
A01
3
υ
υ
−
=
,
R
A
1
4
υ
ω
= , Ry
4
7
M1
= .
Глава 6. Кинематика и динамика абсолютно твердого тела
203
2. Скорость центра колеса направлена в положительном на-
правлении оси X, вращение колеса происходит против часовой
стрелки, мгновенная ось вращения расположена выше точки A (см.
рис. 6.7):
A02
4
υ
υ
=
,
R
A
2
3
υ
ω
−= , Ry
3
7
M2
= .
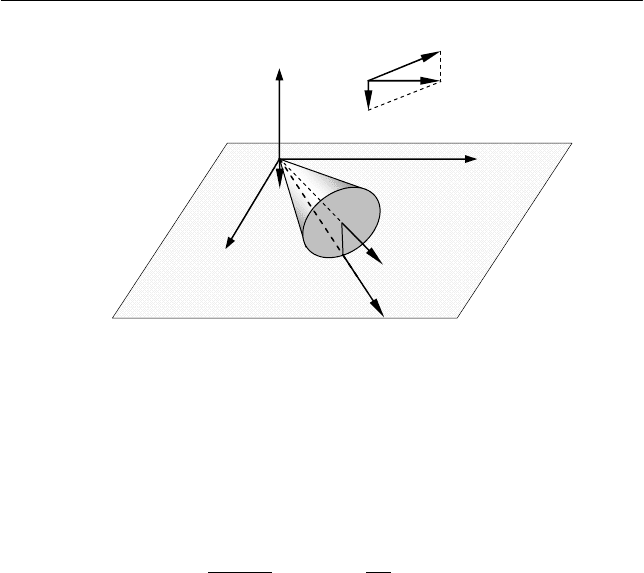
Задача 6.2
Конус, высота которого h = 4 см и радиус основания r = 3 см,
катится по горизонтальной поверхности без проскальзывания, имея
неподвижную вершину в точке O (рис. 6.8).
Определить угловую скорость вращения конуса относитель-
но лабораторной системы отсчета, связанной с поверхностью, если
конус делает один оборот вокруг оси OZ за время T = 3 с.
A
B
M
Y
0
X
0
υ
A
υ
B
υ
0
υ
R
ω
ω
O
Рис. 6.6
A
B
M
Y
0
X
0
υ
A
υ
B
υ
0
υ
R
ω
ω
O
Рис. 6.7
МЕХАНИКА. МЕТОДИКА РЕШЕНИЯ ЗАДАЧ
204
Решение
I. В соответствии с условием задачи выберем лабораторную
систему отсчета, жестко связанную с горизонтальной поверхно-
стью. При этом ось Z системы направим перпендикулярно поверх-
ности, а начало отсчета совместим с неподвижной вершиной кону-
са O (см. рис. 6.8).
В соответствии с принципом суперпозиции движений движе-
ние каждой материальной точки конуса (за исключением точек,
лежащих
на оси конуса OC) относительно выбранной лаборатор-
ной системы отсчета можно рассматривать как суперпозицию двух
движений – вращение с угловой скоростью
1
ω вокруг оси конуса
OC и вращение с угловой скоростью
2
ω вокруг оси Z. Точки, ле-
жащие на прямой OA соприкосновения конуса с поверхностью, в
данный момент времени покоятся, так как нет проскальзывания.
Эта прямая является мгновенной осью вращения, вокруг которой
конус вращается с угловой скоростью
21
ωωω
+
=
.
II. Материальная точка C в центре
основания конуса участвует только в од-
ном движении
− вращении вокруг оси Z с
радиусом R (см. рис. 6.9). При этом ее
скорость в соответствии с условием за-
дачи равна:
R
T
R
π
ωυ
2
2C
==
. (6.59)
Можно считать, что в течение бесконечно малого интервала
времени точка C вращается вокруг мгновенной оси вращения OA с
X
Y
Z
ω
r
С
A
h
O
Рис. 6.8
Рис. 6.9
Z
O
C
R
f
A
ω
Глава 6. Кинематика и динамика абсолютно твердого тела
205
угловой скоростью ω . Следовательно, скорость материальной точ-
ки C в центре основания конуса относительно лабораторной систе-
мы отсчета равна:
f
ω
υ
=
C
, (6.60)
Как видно на рис. 6.9, для R и f выполняются следующие со-
отношения:
22
fh
h
f
r
−
=
, (6.61)
22
fhR −= . (6.62)
III. Решая систему уравнений (6.59) и (6.60), получаем:
Tf
R
π
ω
2
⋅= . (6.63)
Из (6.61) и (6.62) определяем
R и f:
22
hr
rh
f
+
=
,
22
2
hr
h
R
+
=
. (6.64)
Искомая угловая скорость вращения конуса вокруг мгновен-
ной оси относительно лабораторной системы отсчета равна:
=⋅=
Tr
h
π
ω
2
2,79 рад/с. (6.65)
Проанализируем полученный результат. В частности, убе-
димся, что выполняется соотношение между угловыми скоростями
вращения конуса:
ωωω =
+
21
. (6.66)
Определим модуль угловой скорости
1
ω . Для этого восполь-
зуемся тем, что точка A, лежащая на мгновенной оси вращения,
участвует в двух движениях, при этом ее скорость относительно
лабораторной системы отсчета равна нулю:
0
12
=−⋅
=
rOA
ω
ω
υ
. (6.67)
Следовательно, угловая скорость вращения конуса вокруг
оси OZ в соответствии с (6.67) и рис. 6.9 равна
r
rh
22
21
+
=
ωω
. (6.68)
Направления векторов
1
ω ,
2
ω , и
ω
показаны на рис. 6.10.
МЕХАНИКА. МЕТОДИКА РЕШЕНИЯ ЗАДАЧ
206
Вектор
1
ω
направлен вдоль оси конуса OC,
2
ω
– вдоль оси Z
лабораторной системы отсчета,
ω – вдоль мгновенной оси враще-
ния. Все три вектора лежат в одной плоскости и составляют прямо-
угольный треугольник (см. рис. 6.10). Используя соотношения
(6.67) и (6.68), убеждаемся, что
2
2
2
2
2
2
22
2
2
2
2
2
1
1
ωωωωω
==
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
=−
r
h
r
rh
. (6.69)
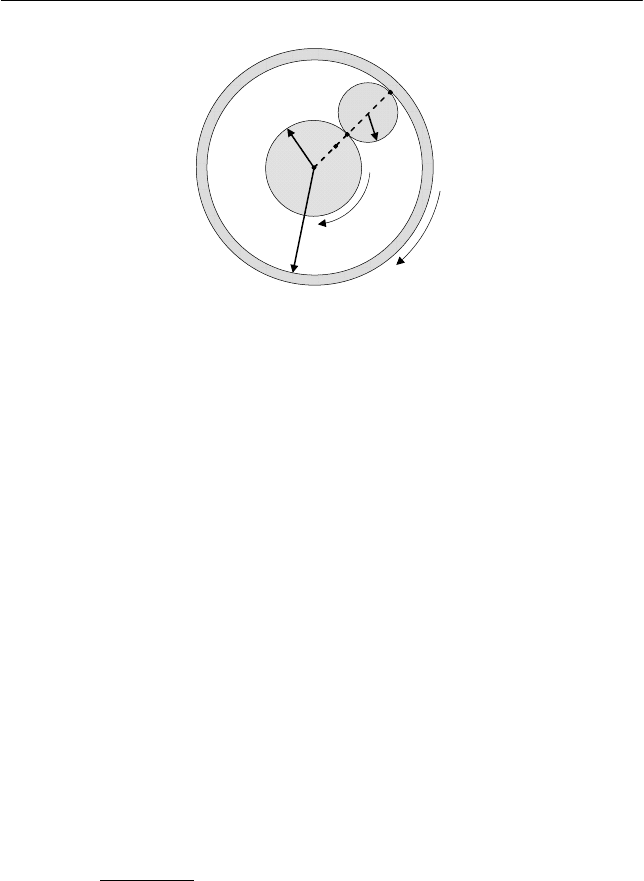
Задача 6.3
Два соосных колеса с радиусами
r
1
и r
2
(r
1
< r
2
) вращаются в
одну сторону с постоянными угловыми скоростями
1
ω и
2
ω
(
21
ω
>ω ). Между колесами зажато третье колесо радиусом
r
3
= (r
2
– r
1
)/2, движущееся без проскальзывания (рис. 6.11). Найти
угловую скорость
ω
вращения третьего колеса и скорость
0
υ
его
центра.
Решение
I. Обозначим точки соприкосновения третьего колеса с пер-
вым и вторым точками B и A соответственно. Для третьего колеса,
зажатого между двумя вращающимися колесами, скорости точек A
и B совпадают со скоростями точек, находящихся на ободах соот-
ветствующих колес (см. рис. 6.11).
Рис. 6.10
X
Y
Z
ω
С
O
1
ω
2
ω
2
ω
ω
1
ω
Глава 6. Кинематика и динамика абсолютно твердого тела
207
II. Поскольку первое и второе колеса вращаются с угловыми
скоростями
1
ω и
2
ω , скорости движения точек A и B при враще-
нии этих колес равны:
22A
r
ω
υ
=
, (6.70)
11B
r
ω
υ
=
. (6.71)
При решении задачи удобно воспользоваться понятием мгно-
венной оси вращения для третьего колеса (см.
п. 6.1. Теоретический материал), относительно которой колесо
вращается с угловой скоростью
ω . В данном случае эта ось пер-
пендикулярна плоскости чертежа и пересекает прямую, проходя-
щую через точки O, B и A. Пусть мгновенная ось вращения лежит
между точками O и B на расстоянии
r
x
от точки O, тогда:
()
31A
2rrr
x
+−
=
ω
υ
, (6.72)
()
x
rr −
=
1B
ω
υ
, (6.73)
при этом для скорости центра третьего колеса можно записать:
()
310
rrr
x
+−
=
ω
υ
. (6.74)
III. Решая систему уравнений (6.70) − (6.73) относительно уг-
ловой скорости вращения третьего колеса
ω , получаем:
3
1122
2r
rr
ωω
ω
−
=
. (6.75)
Подставляя (6.75) в (6.74), получаем искомую скорость цен-
тра третьего колеса:
O
M
A
B
1
r
2
r
3
r
2
ω
1
ω
Рис. 6.11
МЕХАНИКА. МЕТОДИКА РЕШЕНИЯ ЗАДАЧ
208
2
2211
0
rr
ωω
υ
+
=
. (6.76)
6.3.2. Динамика абсолютно твердого тела
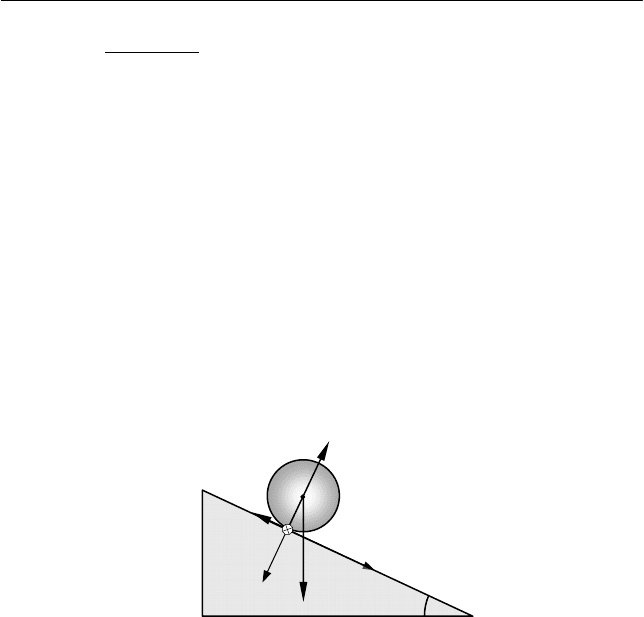
Задача 6.4
С наклонной поверхности клина с углом
α
при вершине ска-
тывается без проскальзывания однородный шар массой
m и радиу-
сом
R. Найти ускорение a центра шара.
Решение
I. При самопроизвольном скатывании шара по наклонной по-
верхности клина в сторону его ребра движение шара является пло-
ским, поскольку все его материальные точки движутся в парал-
лельных плоскостях. Мгновенная ось вращения в данный момент
времени проходит через точку M (см. рис. 6.12)
соприкосновения шара с поверхностью параллельно ребру
клина (перпендикулярно
скорости центра масс шара).
Выберем лабораторную инерциальную систему отсчета, же-
стко связанную с наклонной поверхностью, ось X декартовой сис-
темы координат которой направлена вдоль наклонной поверхности
клина, а ось Y
− перпендикулярно, причем плоскость XY парал-
лельна плоскостям, в которых движутся материальные точки шара
(рис. 6.12).
На шар в процессе движения действуют три силы – сила тя-
жести
g
m , сила трения покоя
тр
F (проскальзывания нет) и сила
реакции опоры
N
(рис. 6.12).
Рис. 6.12
α
Y
X
mg
N
M
F
тр
Глава 6. Кинематика и динамика абсолютно твердого тела
209
II. Запишем уравнение вращательного движения (уравнение
моментов (6.48)) для шара относительно неподвижной оси, совпа-
дающей в данный момент времени с мгновенной осью вращения
(см. рис. 6.12), в лабораторной инерциальной системе отсчета:
α
ω
sin
d
d
mgR
t
J =
, (6.77)
где
ω
− угловая скорость вращения шара, J − момент инерции ша-
ра относительно мгновенной оси вращения. Моменты силы трения
и силы нормальной реакции опоры относительно этой оси равны
нулю.
Запишем также уравнение кинематической связи между ус-
корением центра масс
a и угловым ускорением шара
td
d
ω
(вследст-
вие движения шара без проскальзывания):
t
Ra
d
d
ω
= . (6.78)
Момент инерции шара относительно мгновенной оси враще-
ния найдем, используя теорему Гюйгенса-Штейнера (6.42):
2
0
mRJJ += , (6.79)
где
0
J − момент инерции шара относительно оси, проходящей че-
рез его центр масс (6.45), равный
2
0
5
2
mRJ = . (6.80)
III. Решая систему уравнений (6.77) – (6.79) относительно ус-
корения центра масс шара, получим:
α
sin
1
1
2
0
g
mR
J
a
+
=
. (6.81)
Учитывая выражение (6.80) для момента инерции шара, получаем
искомое ускорение центра шара:
α
sin
7
5
ga =
. (6.82)
Определим условия, при которых полученный результат яв-
ляется верным. Для движения шара по поверхности клина без про-
скальзывания необходимо, чтобы сила трения в соответствии с за-

МЕХАНИКА. МЕТОДИКА РЕШЕНИЯ ЗАДАЧ
210
коном Амонтона–Кулона (см. п. 2.1.2 в Главе 2) удовлетворяла не-
равенству:
NF
μ
≤
тр
. (6.83)
Здесь
μ
– коэффициент трения.
Модули сил трения и нормальной реакции опоры можно най-
ти из уравнения движения шара, записанного в проекциях на оси X
и Y выбранной системы координат (см. рис. 6.12):
тр
sin Fmgma −
=
α
, (6.84)
Nmg −
=
α
cos0 . (6.85)
Решая систему двух уравнений (6.84) – (6.85) и одного нера-
венства (6.83) с учетом найденного ускорения центра шара (6.82),
получаем условие качения шара без проскальзывания по наклонной
поверхности клина:
μα
2
7
tg ≤ . (6.86)
Ответ:
α
sin
7
5
ga = при
2
7
tg
μα
≤ .
Задача 6.5
На гладкой горизонтальной поверхности лежит доска массой
m
1
и на ней − однородный шар массой m
2
. К доске приложили по-
стоянную горизонтальную силу
F. С какими ускорениями будут
двигаться доска
а
1
и центр шара а
2
в отсутствие скольжения между
ними?
Решение
I Введем лабораторную инерциальную систему отсчета, оси
X и Y декартовой системы координат которой направлены так, как
показано на рис. 6.13. При движении шара по доске вдоль горизон-
тальной поверхности в направлении силы F движение шара являет-
ся плоским.
В лабораторной системе отсчета движение шара будем рас-
сматривать как суперпозицию его поступательного движения и
вращения шара относительно горизонтальной оси, проходящей че-
рез его центр масс.