Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.

Semiconductor Manufacturing Automation References 925
lems, and report them to the quality engineers. R2R
control intelligently adapts process control parameters
based on in situ measurements from process sensors.
The response models between the measurement and
control parameters are dynamic, nonlinear, multiple-
input multiple-output (MIMO), and uncertain [52.30].
Therefore, advanced stochastic or statistical functional
models and algorithms, or neural networks are used.
An equipment engineering system (EES) is for tool
vendors to remotely monitor process control of tools
at fabs and tune process parameters. It is intended
to reduce the initial ramp-up period and cost. Tool
vendors cannot keep high-class engineers at customer
sites for long periods, for instance, even more than
6months. Another automation technology for qual-
ity is e-Diagnostics, which enables tool vendors in
remote locations to detect an anomaly in tools in
production at fabs quickly. It can prevent or reduce
production of defective wafers and reduce the lead
time to dispatch tool engineers to customer sites.
Tool vendors and SEMI have developed EES and e-
Diagnostics technologies and standards, including data
standards, security control, remote control or manipula-
tion, etc. [52.31].
52.5 Conclusion
Semiconductor manufacturing fabs have extensively
developed and implemented state-of-the-art industrial
automation technologies. We have briefly reviewed
them in this Chapter. There remain many challenges
for the future, such as for 450 mm fabs. Future
fabs for manufacturing nanodevices may require quite
new concepts of equipment and material handling,
and hence new automation technologies. Concepts,
technologies, and practices of semiconductor manufac-
turing automation can give insights into automation
of other manufacturing industries or service sys-
tems.
References
52.1 C. Haris: Automated material handling system. In:
Semiconductor Manufacturing Handbook,ed.by
H. Geng (McGraw-Hill, New York 2005) pp. 32.1–
32.11
52.2 S. Venkatesh, R. Davenport, P. Foxhoven, J. Nul-
man: A steady-state throughput analysis of cluster
tools: Dual-blade versus single-blade robots,
IEEE Trans. Semicond. Manuf. 10(4), 418–424
(1997)
52.3 J.-H. Paek, T.-E. Lee: Operating strategies of cluster
tools with intermediate buffers, Proc. 7th Annu.
Int. Conf. Ind. Eng. (2002) pp. 1–5
52.4 C. Jung: Stedy State Scheduling and Modeling of
Multi-Slot Cluster Tools. M. Sc. Thesis (Department
of Industrial Engineering, KAIST 2006)
52.5 H.L. Oh: Conflict resolving algorithm to improve
productivity in single-wafer processing, Proc. Int.
Conf. Model. Anal. Semicond. Manuf. (MASM)
(2000) pp. 55–60
52.6 H.J. Yoon, D.Y. Lee: Real-time scheduling of wafer
fabrication with multiple product types, Proc. IEEE
Int. Conf. Syst. Man Cybern. (1999) pp. 835–840
52.7 T.-E. Lee, H.-Y. Lee, S.-J. Lee: Scheduling a wet
station for wafer cleaning with multiple job flows
and multiple wafer-handling robots, Int. J. Prod.
Res. 45(3), 487–507 (2007)
52.8 T.-E. Lee, M.E. Posner: Performance measures and
schedules in periodic job shops, Oper. Res. 45(1),
72–91 (1998)
52.9 T.-E. Lee: Stable earliest starting schedules for pe-
riodic job shops: a linear system approach, Int. J.
Flex.Manuf.Syst.12(1), 59–80 (2000)
52.10 T.-E. Lee, R. Sreenivas, H.-Y. Lee: Workload bal-
ancing for timed event graphs with application to
cluster tool operation, Proc. IEEE Int. Conf. Autom.
Sci. Eng. (2006) pp. 1–6
52.11 J.-H. Kim, T.-E. Lee, H.-Y. Lee, D.-B. Park:
Scheduling of dual-armed cluster tools with time
constraints, IEEE Trans. Semicond. Manuf. 16(3),
521–534 (2003)
52.12 T. Murata: Petri nets: properties, analysis and ap-
plications, Proc. IEEE 77(4), 541–580 (1989)
52.13 Y.-H.Shin,T.-E.Lee,J.-H.Kim,H.-Y.Lee:Model-
ing and implementating a real-time scheduler for
dual-armed cluster tools, Comput. Ind. 45(1), 13–27
(2001)
52.14 T.-E. Lee, S.-H. Park: An extended event graph
with negative places and negative tokens for time
window constraints, IEEE Trans. Autom. Sci. Eng.
2(4), 319–332 (2005)
52.15 J.-H. Kim, T.-E. Lee: Schedule stabilization and
robust timing control for time-constrained clus-
Part F 52
926 Part F Industrial Automation
ter tools, Proc. IEEE Conf. Robot. Autom. (2003)
pp. 1039–1044
52.16 T.-E. Lee, H.-Y. Lee, Y.-H. Shin: Workload balanc-
ing and scheduling of a single-armed cluster tools,
Proc. Asian-Pac. Ind. Eng. Manag. Syst. Conf. (2004)
pp. 1–6
52.17 H.J. Kim: Scheduling and Control of Dual-Armed
Cluster Tools With Post Processes. M. Sc. The-
sis (Department of Industrial Engineering, KAIST
2006)
52.18 H.-Y. Lee, T.-E. Lee: Scheduling single-armed clus-
ter tools with reentrant wafer flows, IEEE Trans.
Semicond. Manuf. 19(2), 224–240 (2006)
52.19 J.-S. Lee: Scheduling Rules for Dual-Armed Clus-
ter Tools With Cleaning Processes. M. Sc. Thesis
(Department of Industrial Engineering, KAIST 2008)
52.20 SEMI E38.1-95: Cluster tool module communica-
tion(CTMC), SEMI International Standards (2007)
52.21 J.-H. Lee, T.-E. Lee, J.-H. Park: Cluster tool mod-
ule communication based on a high-level fieldbus,
Int. J. Comput. Integr. Manuf. 17(2), 151–170 (2004)
52.22 Y.-J. Joo, T.-E. Lee: A virtual cluster tool for testing
and verifying a cluster tool controller and a sched-
uler, IEEE Robot. Autom. Mag. 11(3), 33–49 (2004)
52.23 D.-Y. Liao, H.-S. Fu: A simulation-based, two-
phased approach for dynamic OHT allocation and
dispatching in large-scaled 300 mm AMHS man-
agement, Proc. IEEE Int. Conf. Robot. Autom. 4,
3630–3635 (2002)
52.24 D.-Y. Liao, H.-S. Fu: Speedy delivery-dynamic OHT
allocation and dispatching in large-scale, 300 mm
AMHS management, IEEE Robot. Autom. Mag. 11(3),
22–32 (2004)
52.25 J.S. Pettinato, D. Pillai: Technology decisions to
minimize 450-mm wafer size transition risk, IEEE
Tans. Semicond. Manuf. 18(4), 501–509 (2005)
52.26 D. Pillai: The future of semiconductor manufactur-
ing, IEEE Robot. Autom. Mag. 13(4), 16–24 (2006)
52.27 SEMI The international technology roadmap for
semiconductors (ITRS): an update, SEMI Eur. Stand.
Autumn Conf. (2006)
52.28 SEMI International Standards, SEMI (2007), CD-ROM
52.29 D. Krafzig, K. Banke, D. Slama: Enterprise SOA:
Service-Oriented Architecture Best Practices (Pren-
tice Hall, Upper Saddle River 2005)
52.30 J. Moyne, E. del Castillo, A.M. Hurwitz: Run-to-Run
Control in Semiconductor Manufacturing (CRC, New
York 2001)
52.31 H. Wohlwend: e-Diagnostics Guidebook: Revi-
sion 2.1 (Int. SEMATECH Manuf. Initiative, 2005),
http://www.sematech.org/docubase/abstracts/
4153deng.htm
Part F 52

927
Nanomanufac
53. Nanomanufacturing Automation
Ning Xi, King Wai Chiu Lai, Heping Chen
This chapter reports the key developments for
nanomanufacturing automation. Automated CAD
guided nanoassembly can be performed by an
improved atomic force microscopy (AFM). Al-
though CAD guided automated manufacturing
has been widely studied in the macro-world,
nanomanufacturing is challenging. In nano-
environments, the nanoobjects are usually
distributed on a substrate randomly, so the
nanoenvironment and the available nanoobjects
have to be modeled in order to design a feasible
nanostructure. Because of the positioning errors
due to the random drift, the actual position of
each nanoobject has to be identified by our lo-
cal scanning method. The advancement of AFM
increases the efficiency and accuracy to manip-
ulate and assemble nanoobjects. Besides, the
manufacturing process of carbon nanotube (CNT)
based nanodevices is discussed. A novel auto-
mated manufacturing system has been especially
designed for manufacturing nanodevices. The
system integrates a new dielectrophoretic (DEP)
microchamber into a robotic based deposition
workstation and increases the yield to form
semi-conducting CNTs for manufacturing nano-
devices. Therefore, by using the proposed CNT
separation and deposition system, CNT based
53.1 Overview.............................................. 927
53.2 AFM-Based Nanomanufacturing............. 930
53.2.1 Modeling of the Nanoenvironments 930
53.2.2 Methods
of Nanomanipulation Automation. 930
53.2.3 Automated Local Scanning Method
for Nanomanipulation Automation 935
53.2.4 CAD Guided Automated
Nanoassembly ............................ 937
53.3 Nanomanufacturing Processes ............... 937
53.3.1 Dielectrophoretic Force
on Nanoobjects........................... 938
53.3.2 Separating CNTs
by an Electronic Property
Using the Dielectrophoretic Effect.. 939
53.3.3 DEP Microchamber
for Separating CNTs...................... 939
53.3.4 Automated Robotic CNT Deposition
Workstation................................ 940
53.3.5 CNT-Based Infrared Detector ......... 944
53.4 Conclusions.......................................... 944
References .................................................. 944
nanodevices with specific and consistent
electronic properties can be manufactured
automatically and effectively.
53.1 Overview
Nanoscale materials with unique mechanical, elec-
tronic, optical, and chemical properties have a variety
of potential applications such as nanoelectromechanical
systems (NEMS) and nanosensors. The development
of nanoassembly technologies will potentially lead to
breakthroughs in manufacturing new revolutionary in-
dustrial products. The techniques for nanoassembly
can be generally classified into bottom-up and top-
down methods. Self-assembly in nanoscale is reported
as the most promising bottom-up technique, which is
applied to make regular, symmetric patterns of na-
noentities. However, many potential nanostructures and
nanodevices are asymmetric, which cannot be manu-
factured using self-assembly only. A top-down method
would be desirable to fabricate complex nanostruc-
tures.
Part F 53

928 Part F Industrial Automation
The semiconductor fabrication technique is a ma-
tured top-down method, which has been used in the fab-
rication of microelectromechanical systems (MEMS).
However, it is difficult to build nanostructures using this
method due to limitations of the traditional lithogra-
phy. Although smaller features can be made by electron
beam nanolithography, it is practically very difficult
to position the feature precisely using e-Beam nano-
lithography. The high cost of the scanning electron
microscopy (SEM), ultrahigh vacuum condition, and
space limitation inside the SEM vacuum capsule also
impede its wide application.
Atomic force microscopy (AFM) [53.1] has proven
to be a powerful technique to study sample surfaces
downto the nanoscale. It can work with both conductive
and insulating materials and in many conditions, such
as air and liquid. Not only can it characterize sample
surfaces, it can also modify them through nanolithog-
raphy [53.2, 3] and nanomanipulation [53.3, 4], which
is a promising nanofabrication technique that combines
top-down and bottom-up advantages. In recent years,
many kinds of AFM-based nanolithographies have been
implemented on a variety of surfaces such as semicon-
ductors, metals, andsoft materials [53.5–8].A variety of
AFM-based nanomanipulation schemes have been de-
veloped to position and manipulate nanoobjects [53.9–
13]. However, nanolithography itself can hardly be
considered as sufficient for fabrication of a com-
plete device. Thus, manipulation of nanoobjects has
to be involved in order to manufacture nanostructures
and nanodevices. The AFM-based nanomanipulation is
much more complicated and difficult than the AFM-
based nanolithography because nanoobjects have to be
manipulated from one place to another by the AFM tip,
and sometimes it is necessary to relocate the nanoob-
jects during nanomanipulation while nanolithography
can only draw patterns. Since the AFM tip as the ma-
nipulation end-effector can only apply a point force on
a nanoobject, the pushing point on the nanoobject has
to be precisely controlled in order to manipulate the
nanoobjects to their desired positions. In the most re-
cently available AFM-based manipulation methods, the
manipulation paths are obtained either manually using
haptic devices [53.9, 10] or in an interactive way be-
tween theusers and the atomic force microscope (AFM)
images [53.11,12]. The main problem of these schemes
is their lack of real-time visual feedback, so an aug-
mented reality interface has been developed [53.14,15].
But positioning errors due to deformation of the can-
tilever and random drift such as thermal drift cause
the nanoobjects to be easily lost or manipulated to
wrong places during manipulation; the result of each
operation has to be verified by a new image scan
before the next operation starts. This scan-design-
manipulation-scan cycle is usually time consuming and
inefficient.
In order to increase the efficiency and accuracy
of AFM-based nanoassembly, automated CAD guided
nanoassembly is desirable [53.16]. In the macroworld,
CAD guided automated manufacturing has been widely
studied [53.17]. However, it is not a trivial extension
from the macroworld to the nanoworld. In the nanoenvi-
ronments, the nanoobjects,which includenanoparticles,
nanowires, nanotubes, etc., are usually distributed on
a substrate randomly. Therefore, the nanoenvironment
and the available nanoobjects have to be modeled
in order to design a feasible nanostructure. Because
manipulation of nanoparticles only requires transla-
tion, while manipulation of other nanoobjects such as
nanowires involve both translation and rotation, manip-
ulation of nanowires is more challenging than that of
nanoparticles. To generate a feasible path to manipulate
nanoobjects, obstacle avoidance must also be consid-
ered. Turns around obstacles should also be avoided
since they may cause the failure of the manipulation.
Because of the positioning errors due to the random
drift, the actual position of each nanoobject must be
identified before each operation.
Beside, the deformation of the cantilever caused by
manipulation force is one of the most major nonlineari-
ties and uncertainties. It causes difficulties in accurately
controlling the tip position, and results in missing the
position of the object. The softness of the conventional
cantilevers also causes the failure of manipulation of
sticky nanoobjects because the tip can easily slip over
the nanoobjects. An active atomic force microscopy
probe is used as an adaptable end effector to solve these
problems by actively controlling the cantilever’s flex-
ibility or rigidity during nanomanipulation. Thus, the
adaptable end effector is controlled to maintain straight
shape during manipulation [53.18].
Apart from nanoassembly, manufacturing process
of nanodevices is important. Carbon nanotube (CNT
)
has been investigated as one of the most promising can-
didates to be used for making different nanodevices.
CNTs have been shown to exhibit remarkable electronic
properties, such as ballistic transport and semiconduct-
ing behavior, which depend on their diameters and
chiralities. Recently, it was demonstrated that CNTs
can be used to build various types of devices such as
nanotransistors [53.19], logic devices [53.20], infrared
detectors [53.21, 22], light emitting devices [53.23],
Part F 53.1
Nanomanufacturing Automation 53.1 Overview 929
chemical sensors [53.24, 25], etc. The general man-
ufacturing processes of CNT-based devices is shown
in Fig.53.1. The most challenging parts include CNT
selection, deposition, and assembly. Basically, CNT
assembly can be done by our AFM-based nanoma-
nipulation system [53.26]. With the advancement of
our automated local scanning method for AFM sys-
tems [53.27], automated assembly for CNT-based
devices can be done effectively. However, electronic
properties of CNTs vary and CNTs can beclassified into
two types: semiconducting CNTs and metallic CNTs.
Therefore, an automatic method for the selection and
deposition of a single CNT with a specific electronic
property should be established [53.28,29].
Selection of a CNT with the desired electronic
property is crucial to its application. Basically, sev-
eral approaches have been pursued to separate different
electronic types of CNTs. Arnold et al. demonstrated
that semiconducting CNTs and metallic CNTs were
separated by using some encapsulating agents or sur-
factants [53.30]. Besides, Avouris et al. demonstrated
turning a metallic CNT into a semiconducting CNT
after removal of metallic carbon shells by an electri-
cal breakdown process [53.31]. Krupke et al. reported
a technique to enrich metallic CNT thin film. They
demonstrated that metallic CNTs were concentrated on
a substrate by using dielectrophoresis[53.32,33]. Based
on the review of these CNT separation techniques,
we develop a microchamber to filter different types of
CNTs effectively.
Various methods have been proposed to move and
deposit a CNT to the metal microelectrodes; this ad-
vances the manufacturing process of the CNT-based
nanodevices. A nanorobotic technique uses nanomanip-
ulators inside a scanning electron microscopy (SEM)to
perform the nanomanipulation. Since a sample cham-
ber of an SEM
is spacious, it is possible to put some
custom-design nanomanipulators inside the chamber.
Yu et al. put a custom piezoelectric vacuum manipula-
torinsidethechamberofanSEM, and they visually
observed the manipulation process of CNTs [53.34].
Dong et al. also developed a 16-degree-of-freedom
nanorobotic manipulator to characterize CNTs inside
an SEM system [53.35]. The idea of nanoassembly
inside SEM is promising, but it needs a vacuum en-
vironment for proper operation. Alternatively, electric
field assisted methods have been proposed to manipu-
late and deposit CNTs directly. Green et al. introduced
AC electrokinetics forcesto manipulatesub-micrometer
particles on microelectrode structures [53.36]. Bundled
CNTs have also been manipulated by dielectrophoretic
CNT assembly
CNT deposition
Reliable
nanomanufactoring
process for
CNT-based devices
Semiconducting
CNT selection
Nanolithography
Substrate fabrication
Chip packaging
Band gap tuning
Chip design
Fig. 53.1 Flow chart of nanomanufacturing of CNT-based devices
(DEP) force [53.37, 38]. Moreover, Dong and Nel-
son reported the batch fabrication of CNT bearings
and transistors by assembling CNTs on a silicon chip
using DEP force [53.39, 40]. A fabricated chip was
immersed in a reservoir that contained CNT suspen-
sion, and CNTs were deposited on the microchip by
applying a composite AC/DC electric field. This elec-
tric field manipulation technique is an effective and
feasible method to batch manipulate CNTs manually.
However, an automated robotic system for mass pro-
duction of consistent CNT-based devices has not been
archived.
An automated nanomanipulation system is dis-
cussed in Sect.53.2. The collision-free paths are
generated based on the CAD model, the environment
model, and the model of the nanoobjects. A local
scanning method is developed to obtain the actual po-
sition of each nanoobject to compensate for the random
drift. Moveover, automatic nanoassembly of nanostruc-
tures using the designed CAD models is presented.
The nanomanufacturing process of CNT-based device
is discussed in Sect.53.3. The process includes the de-
velopment of a novel CNT separation system and an
automated deposition processes for both single-walled
carbon nanotubes (SWCNTs) and multi-walled carbon
nanotubes (MWCNTs).
Part F 53.1
930 Part F Industrial Automation
53.2 AFM-Based Nanomanufacturing
In recent years, many kinds of nanomanipulation
schemes have been developed to manipulate nanoob-
jects. A nanorobotic technique uses nanomanipulators
inside an SEM to perform the nanomanipulation [53.34,
35]. The idea of nanoassembly inside SEM is promis-
ing, but it needs a vacuum environment for proper
operation. AFM is a promising tool for nanomanu-
facturing [53.12, 41]. Nanoobjects were manipulated
by an AFM tip to build nanostructures and devices
effectively because of its high resolution. Besides, it
does not need to work in a vacuum environment,
which allows more freedom in the nanomanufacturing
process. In order to use AFM for nanomanufactur-
ing, further studies and improvements have been done.
Since nanoobjects are usually distributed on a sub-
strate randomly in the nanoworld, the nanoenvironment
and the nanoobjects must be modeled in order to de-
sign a feasible nanostructure. In order to manipulate
nanoobjects automatically, obstacle avoidance must be
considered to generate a feasible path to manipulate
nanoobjects. Because of positioning errors due to the
random drift, the actual position of each nanoobject
must be identified before each operation; this correc-
tion can be done by our local scanning method. In order
to increase the efficiency and accuracy of AFM-based
nanoassembly, automatedCAD guidednanoassembly is
desirable.
53.2.1 Modeling of the Nanoenvironments
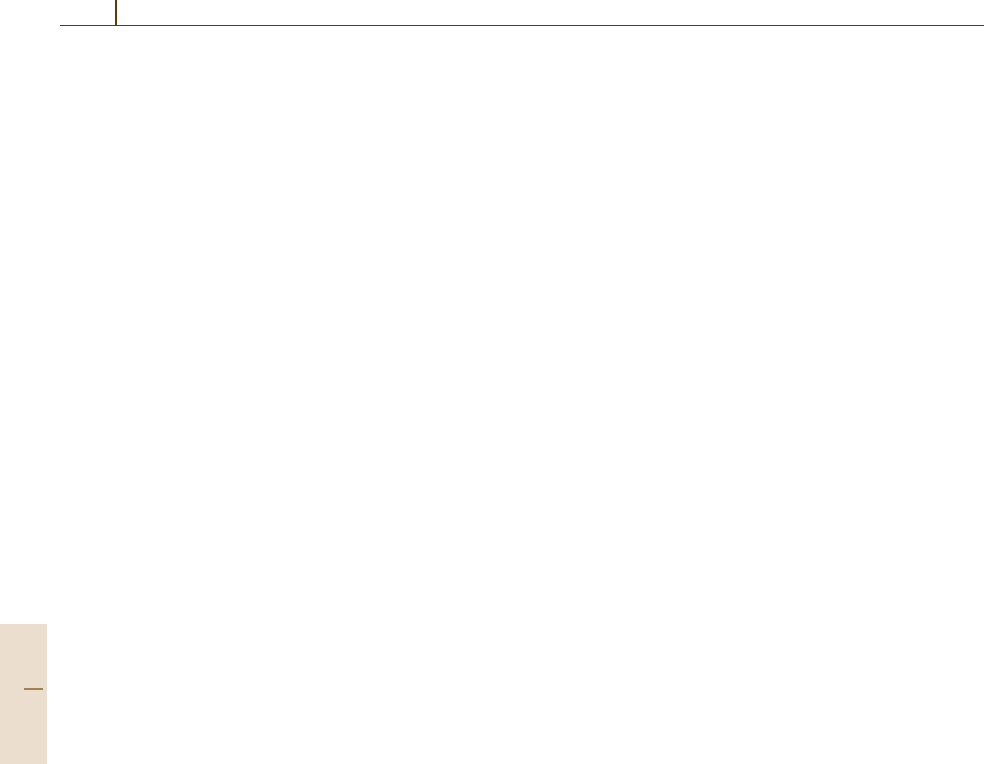
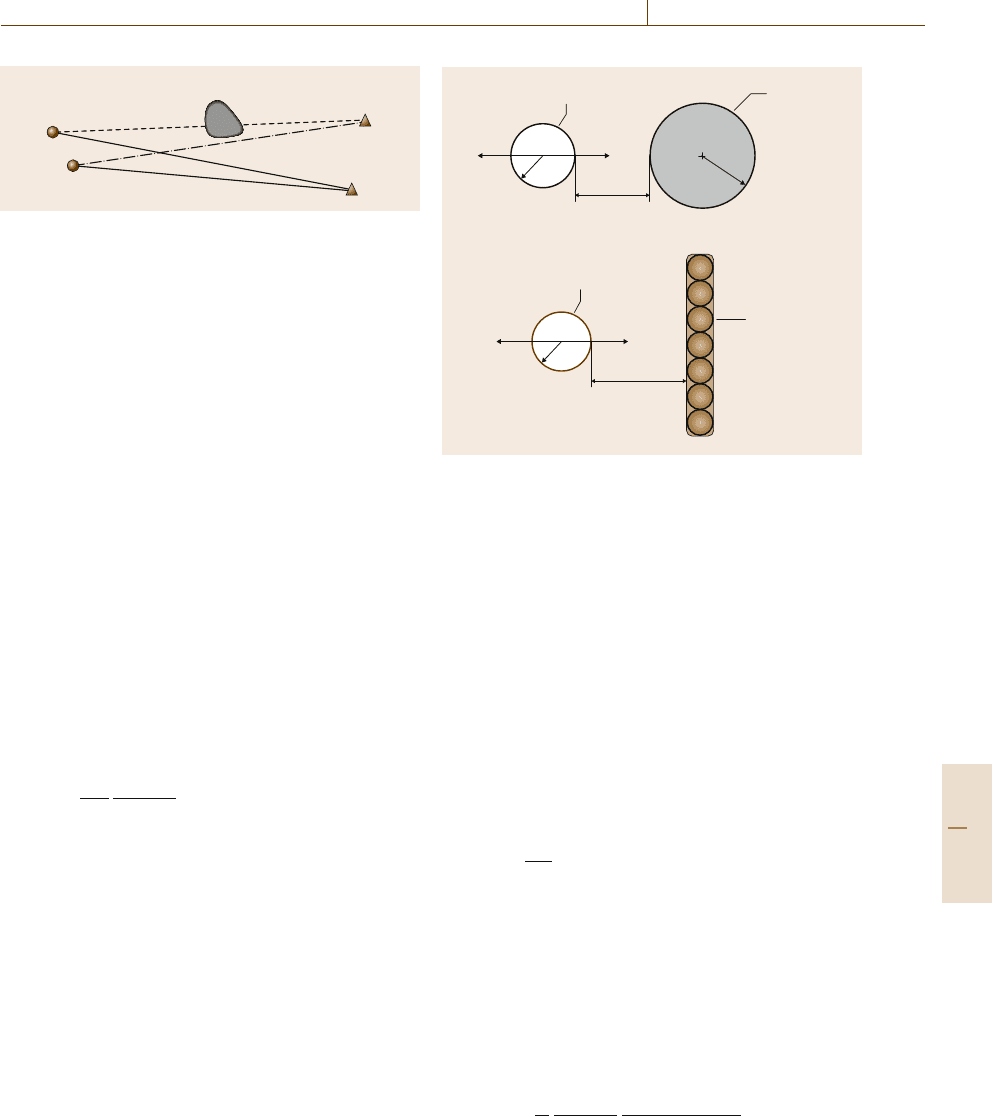
Because the nanoobjects are randomly distributed on
a surface, the positionof each nanoobject must be deter-
mined inorder to perform automatic manipulation. Also
the nanoobjects have different shapes, such as nanopar-
ticles and nanowires, as shown in Fig. 53.2. They must
be categorized before manipulation because the manip-
ulation algorithms for these nanoobjects are different.
After an AFM image is obtained, the nanoobjects
can be identified and categorized. The X, Y coordinates
and the height information of each pixel can be obtained
from the AFMscanning data. Becausethe height,shape,
and size of nanoobjects are known, they are used as
criteria to identify nanoobjects and obstacles based on
a fuzzy method as follows. Firstly, all pixels higher than
a threshold height are identified. The shapes of clus-
tered pixels are categorized and compared withthe ideal
shapes of nanoobjects. If the shape of clustered pixels is
close to the ideal shape, the pixels are assigned a higher
probability (p
1
). Secondly, if the height of a pixel is
close to the ideal height of nanoobjects, a higher prob-
ability (p
2
) is assigned to it. Thirdly, the neighboring
pixels with higher probability (p
1
p
2
) are counted and
the area of the pixels is identified. If the area is close to
the size of nanoobjects, the pixels are assigned a higher
probability (p
3
). If theprobability (p
1
p
2
p
3
) of apixel is
higher than a threshold, it is in a nanoobject. Using the
neighboring relationship of pixels, objects can then be
identified. The length of a nanoobject can be calculated
by finding the long and short axes using a least squares
fitting algorithm. If the length/width ratio is larger than
a set value, it is considered as a nanowire, otherwise, as
a nanoparticle.
53.2.2 Methods
of Nanomanipulation Automation
Since the AFM tip can only apply force to a point
on a nanoobject in AFM-based nanomanipulation, it is
very challenging to generate manipulation paths to ma-
nipulate nanoobjectsto a desired location, especially for
nanowires, because manipulation of nanoparticles only
requires translation, while that of nanowires involves
translation as well as rotation. Turns around obstacles
should be avoided since they may cause manipulation
failure. In the following sections, automated manipula-
tion of nanoparticles and nanowires, respectively, will
be discussed.
02468
2 µm
Nanoparticle
Nanowire
8
6
4
2
0
Fig. 53.2 Nanoobjects obtained from AFM scanning. The
scanning area is 8μm×8μm
Part F 53.2
Nanomanufacturing Automation 53.2 AFM-Based Nanomanufacturing 931
O1
O2
S1
D2
D1
Fig. 53.3 The straight line connection between an object
and a destination. O1 and O2 are objects, D1 and D2 are
destinations, S1 is an obstacle
Automated Manipulation of Nanoparticles
Once the destinations, objects, and obstacles are deter-
mined, a collision-free path can be generated by the tip
path planner.
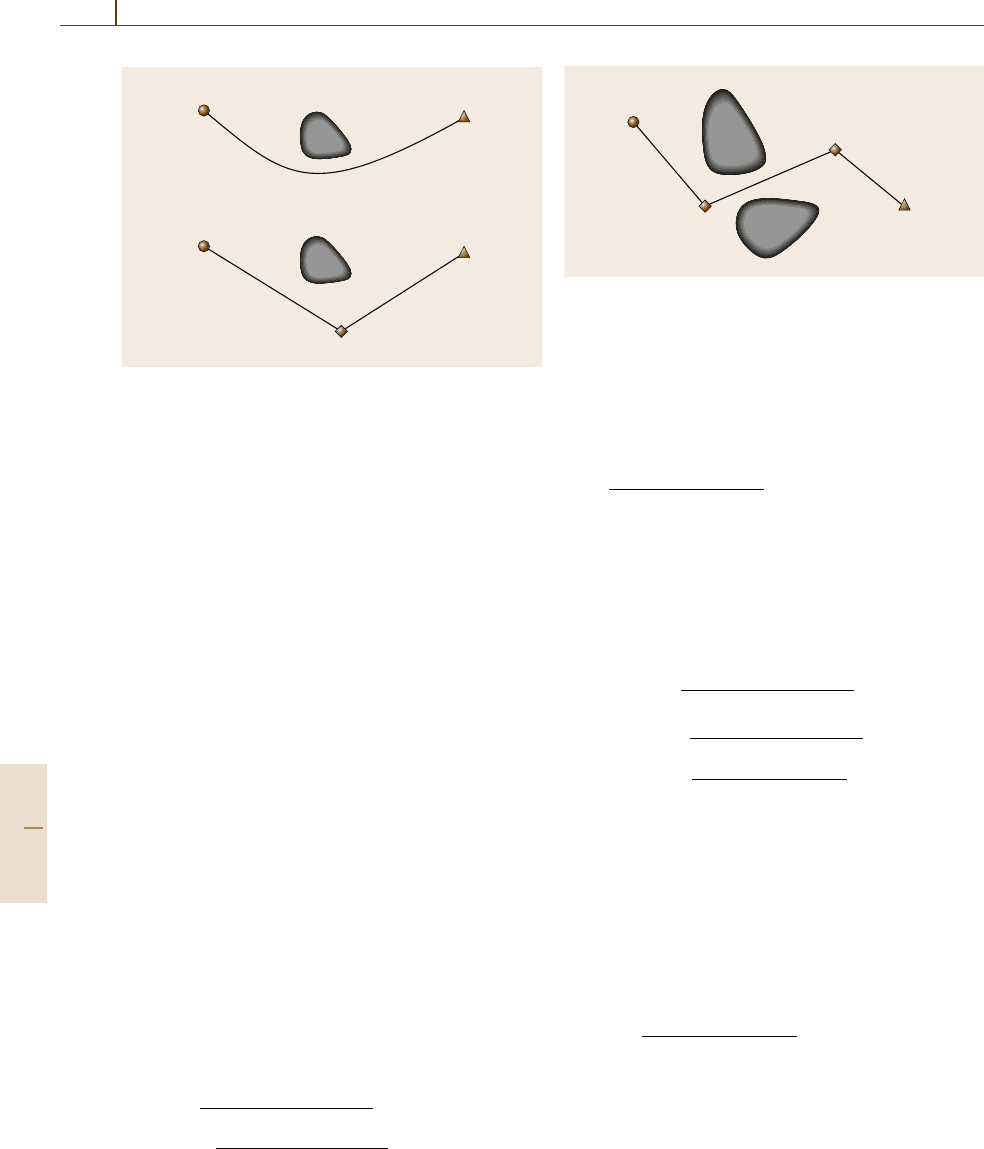
A direct path (straight path) is a connection from
an object to a destination using a straight line without
any obstacles or potential obstacles in between. Fig-
ure 53.3 shows the connections between objects and
destinations. The paths from O2 to D2 and from O1 to
D2 are direct paths, and the path between O1 and D1 is
not a direct path due to collision.
Due to the van der Waals force between an object
and an obstacle, the object may beattracted to the obsta-
cle if the distance between them is too small. Therefore,
the minimum distance has to be determined first to
avoid the attraction. Figure 53.4ashowsa particleobject
and a particle obstacle, and Fig.53.4b a particle object
and a nanowire obstacle, respectively.
In the first case, all objects and obstacles are as-
sumed to be spheres; the van der Waals force can be
expressed as [53.42]
F
w
=
−A
6D
R
1
R
2
R
1
+R
2
, (53.1)
where F
w
is the van der Waals force, A is the Hamaker
constant, D is the distancebetween the two spheres, and
R
1
and R
2
are the radii of the two spheres. For the sec-
ond case that the obstacle is a nanowire, the nanowire
can be considered as separated nanoparticles, so the
van der Waals force between a nanoparticle and each
separated nanoparticles can be calculated using (53.1).
Different materials have different Hamaker con-
stants. Nevertheless, the Hamaker constants are found
to lie in the range (0.4−4)×10
−19
J [53.42]. If an ob-
ject is not attracted to an obstacle, the van der Waals
force between an object and a destination has to be bal-
anced by the friction force between the object and the
surface. The friction force between the object and the
surface can be formulated as [53.43]
F
c
=μ
os
F
r
os
+νF
a
os
, (53.2)
Object Obstacle
D
R
1
R
2
F
c
F
w
Object
Nanowire
D
R
F
c
F
w
a)
b)
Fig. 53.4a,b The van der Waals force between objects and
obstacles. The objects are nanoparticles.
(a) The obstacle is
a nanoparticle. R
1
and R
2
are the radius of the two spheres
respectively, D isthe distance between the two spheres, F
w
is the van der Waals force,and F
c
the friction force.(b) The
obstacle is a nanowire. The nanowire can be considered as
a line of nanoparticles. R is the radius of the sphere
where F
c
is the friction force, μ
os
is the sliding friction
coefficient between an object and the substrate surface,
ν is the shear coefficient, F
r
os
is the repulsive force,
and F
a
os
is the adhesive force. When pushing an object,
the minimum repulsive force equals the adhesive force.
Then (53.2) becomes
F
c
=(μ
os
+ν)F
a
os
. (53.3)
The adhesive force F
a
os
can be estimated by [53.43]
F
a
os
=
A
os
A
ts
F
a
ts
, (53.4)
where A
os
is thenominal contact area between anobject
and a substrate surface, A
ts
is the nominal contact area
between the AFM tip and the substrate surface, and F
a
ts
is the measured adhesive force between the AFM tip
and the surface.
Since the van der Waals force must be balanced by
the friction force during manipulation, the minimum
distance D
min
can be calculated using (53.1), (53.3)and
(53.4)
D
min
=
A
6
R
1
R
2
R
1
+R
2
A
ts
(μ
os
+ν)A
os
F
a
ts
. (53.5)
The distance between an object and a nanowire must
be larger than D
min
during manipulation. If there is an
Part F 53.2
932 Part F Industrial Automation
O1
a)
b)
S1
D1
O1
S1
V1
D1
Fig. 53.5 (a) A path with turns. An object may be lost
during turns.
(b) A virtual object and destination (VOD)
connects an object and a destination. O1 is an object, D1 is
a destination, S1 is an obstacle, and V1 is a VOD
obstacle that is close or on the straight line, the path
formed by the straight line is not considered as a di-
rect path. For example, the path between O2 and D1
in Fig.53.3 is not a direct path due to the attraction.
After the direct paths are generated, objects are as-
signed to the destinations one to one. There are some
destinations that may not have any objects assigned to
them. This is because there are no direct paths to some
destinations. Therefore, indirect paths (curved paths) to
avoid the obstacles must be generated. In general, it is
possible to lose particles during nanomanipulation in
both direct paths or curved paths, but a curved path as
shown in Fig.53.5 has a much higher risk of losing ob-
jects than a direct path. The AFM-based manipulation
system can use force feedback to detect the lost particle
during the manipulation. A surface must be scanned
again if an object is lost during manipulation. Because
the scanning time is much longer than the manipulation
time, turns should be avoided during nanomanipula-
tion. To solve the problem, a virtual-object-destination
algorithm has been developed. Figure 53.6 shows
a virtual-object-destination (VOD).
An object and a destination are connected using
direct paths through a VOD. Since there are many pos-
sible VODs to connect an object and a destination,
a minimum distance criterion is applied to find a VOD.
The total distance to connect an object and a destination
through a VOD is
d =
+
(x
2
−x
0
)
2
+(y
2
−y
0
)
2
+
+
(x
2
−x
1
)
2
+(y
2
−y
1
)
2
, (53.6)
O1
S1
D1
S1
V1
V2
Fig. 53.6 Two VODs connect an object with a destination.
O1 is an object, D1 is the destination, and S1 and S2 are
obstacles
where x
2
, y
2
are the coordinates of the center of a VOD,
x
0
, y
0
are the coordinates of the center of an object, and
x
1
, y
1
are the coordinates of the center of a destination.
The connections between the VOD, object and des-
tination have to avoid the obstacles, i.e.,
+
(x −x
s
)
2
+(y−y
s
)
2
≥ D
min
+R
, (53.7)
where x, y are the coordinates of the object center along
the path and x
s
, y
s
are the coordinates of the center of
the obstacle. R
is defined as
R
= R
1
+R
2
. (53.8)
Then a constrained optimization problem is formu-
lated
min
x
2
,y
2
d =
+
(x
2
−x
0
)
2
+(y
2
−y
0
)
2
+
+
(x
2
−x
1
)
2
+(y
2
−y
1
)
2
,
subject to:
+
(x −x
s
)
2
+(y−y
s
)
2
≥ D
min
+R
.
(53.9)
This isa single objectiveconstrained optimization prob-
lem. A quadratic loss penalty function method [53.44]
is adopted to deal with the constrained optimization
problem by formulating a new function G(x)
min
x
2
,y
2
G(x) = min
x
2
,y
2
d +β(min[0, g])
2
, (53.10)
where β is a big scalar and g is formulated using the
given constraint, i.e.
g =
+
(x −x
s
)
2
+(y−y
s
)
2
−(D
min
+R
) . (53.11)
Then the constrained optimization problem is trans-
ferred into an unconstrained one using the quadratic
loss penalty function method. The pattern search
method [53.45] is adopted here to optimize the uncon-
strained optimization problem to obtain the VOD.
Part F 53.2
Nanomanufacturing Automation 53.2 AFM-Based Nanomanufacturing 933
If one virtual object and destination cannot reach
an unassigned destination, two or more VODsmust
be found to connect an object and a destination. Fig-
ure 53.6 illustrates the process. Similarly, the total
distance to connect the object and destination can be
calculated. The constraint is the same as (53.9). Then,
a single objective constrained optimization problem can
be formulated to obtain the VODs.
Automated Manipulation of Nanowires
The manipulation of a nanowire is much more compli-
cated than that of a nanoparticle because there is only
translation during manipulation of a nanoparticle, while
there are both translation and rotation during manipula-
tion of a nanowire. A nanowire can only be manipulated
to a desired position by applying force alternatively
close to its ends. From an AFM image, nanowires can
be identified andrepresented bytheir radius andtwo end
points. Each end point on a nanowire must be assigned
to the corresponding point on the destination. The start-
ing pushing point is important since it determines the
direction along which the object moves. By choosing
a suitable step size, an AFM tip path can be gener-
ated. Therefore, the steps of automated manipulation
of nanowire are: find the initial position and destination
of a nanowire, find the corresponding points, find start-
ing pushing point, and calculate the pushing step and
plan the tip trajectory. The details of the steps are given
below.
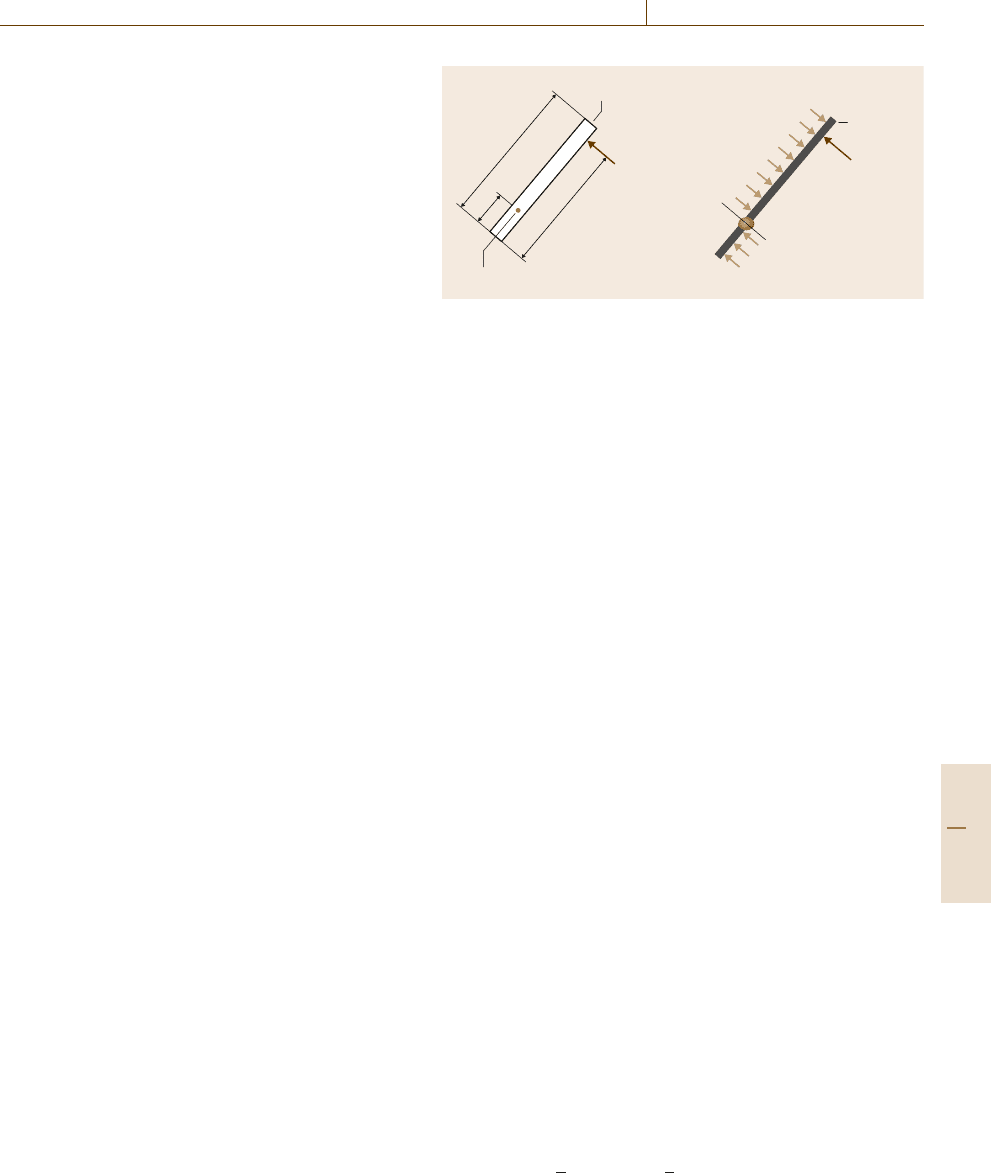
To automatically manipulate a nanowire, its behav-
ior under a pushing force has to be modeled. When
a pushing force is applied to a nanowire, the nanowire
starts to rotate around a pivot if the pushing force is
larger than the friction force. Figure 53.7 shows the
applied pushing force and the pivot. The nanowire ro-
tates around point D when it is pushed at point C by
the AFM tip. The nanowire under pushing may have
different kinds of behavior, which depend on its own
geometry property. If the aspect ratio of a nanowire is
defined as
σ =d/L .
(53.12)
A nanowire with the aspect ratio of σ>25 usually
behaves like a wire, which will deform or bend un-
der pressure. The rotation behavior was observed for
nanowires with aspect ratio of σ<15. In this case,
the pushing force F from the tip causes the friction
and shear force F
= μ
ot
F+νF
a
ot
along the rod axis
direction when the pushing direction is not perpendic-
ular to the rod axis, where μ
ot
and ν are the friction
and shear coefficients between the tip and the nanowire,
Static point
s
L
l
F
F
Nanowire
Nanowire
C
D
A
B
a) b)
Fig. 53.7a,b The behavior of a nanowire under a pushing force:
(a) F is the applied external force, L is the length of the nanowire
(b) the detailed force model. D is the pivot where the nanowire
rotates, C is the pushing point
which depend on the material properties and the envi-
ronment, F
a
ot
is the adhesion force between the tip and
the nanowire.
Fortunately, it is easy to prove that the force F
hardly causes the rod to move along the rod axis direc-
tion. Assuming that the shear forces between rod and
surface are equal along all directions during moving,
fL = f
max
d . (53.13)
Because the shear force is usually proportional to the
contact area, and the contact area between a nanowire
and surface is much greater than that between the tip
and the nanowire,
νF
a
ot
f
d . (53.14)
Also note that
F ≤ fL= f
max
d , (53.15)
and because μ is usually very small, finally it is reason-
able to assume that
f
d = F
μF+νF
a
ot
< f
max
d . (53.16)
This means that the rod will have no motion along the
axis direction and, therefore, the static point D must
be on the axis of the nanowire. Considering the above
analysis, the nanowire can be simplified as a rigid line
segment. The external forces applied on the nanowire in
surface plane can be modeled as shown inFig.53.7. The
pivot D can be either inside the nanowire or outside the
nanowire. First assume that D is inside the nanowire.
In this case, all the torques around D are self-balanced
during smooth motion.
F(l−s) =
1
2
f(L −s)
2
+
1
2
fs
2
, (53.17)
Part F 53.2
934 Part F Industrial Automation
β
F
Nanowire
(initial position)
Nanowire
(destination)
P
s2
P
s1
P
d2
P
d1
Fig. 53.8 The initial position of the nanowire and the destination
where it is manipulated
where F is the applied external force, f is the evenly
distributed friction and shear force density on the
nanowire, L is the length of the nanowire, s is the
distance from one end of the nanowire (point A
in Fig.53.7) to the pivot D, and l is the distance from
A to C, where the external force is applied. Equa-
tion (53.17) can be written as
F =
f(L −s)
2
+ fs
2
2(l−s)
.
(53.18)
The pivot can be found by minimizing F with respect to
s,i.e.
dF
ds
=0 ⇒ s
2
−2ls+lL−L
2
/2 =0 . (53.19)
Sincewehaveassumedthat0< s < L, a unique solu-
tion of the pivot for any 0 < l < L except l = L/2 can
be determined by
s =
⎧
⎨
⎩
l+
,
l
2
−lL+L
2
/2 l < L/2
l−
,
l
2
−lL+L
2
/2 l > L/2
.
(53.20)
When l = L/2, there is no unique solution. A detailed
analysis will show that s can be any value when the
θ
1
θ
2
θ
θ
F, pushing point
F
F
Nanowire (destination)
Nanowire (initial position)
Starting position
End position
P
s
P
i
P
d
L
p
Q
i
Fig. 53.9 The manipulation of a nanowire from an initial position to its destination
force F is applied in the exact middle of the rod, the
point T becomes a bifurcation point. Now, assume the
static point D is outside of rod and on the left side. Not-
ing that s < 0 now, the self-balanced torque equation
becomes
f(l−s) = fL(L/2−s) ,
(53.21)
namely
F =
fL(L/2−s)
2(l−s)
.
(53.22)
It can be seen that F can only be minimized at l = L/2
dF
ds
=0, for l = L/2 .
(53.23)
Similarly, ifstatic pointD ison theright side (s > 0), the
analysis results shouldbe the same. Practically, it is hard
to keep T at this bifurcation point (l = L/2). Therefore,
during manipulation, it is better to avoid pushing the
exact middle of the rod because it is hard to predict the
behavior of the rod in this case.
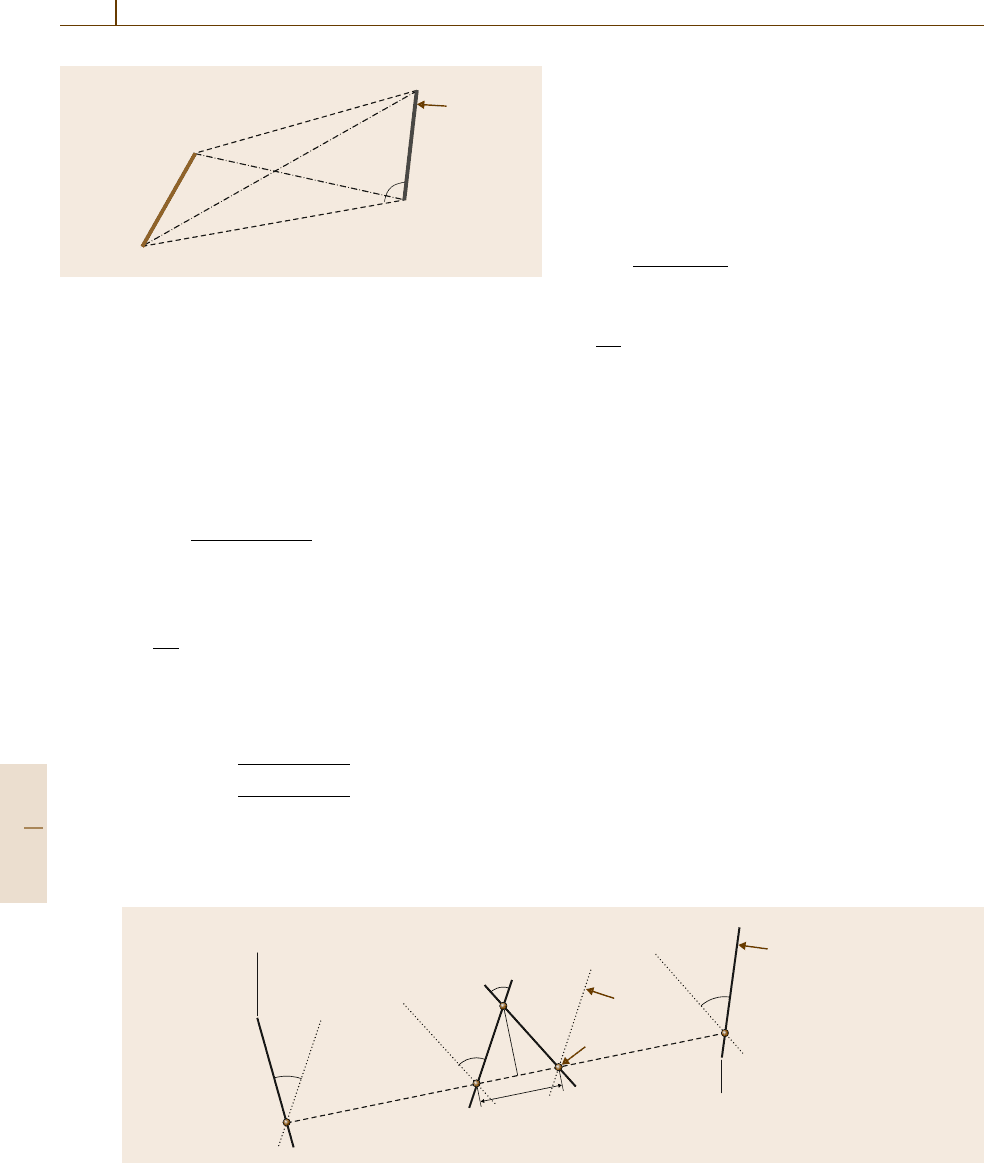
The corresponding points between a nanowire and
its destination have to be matched in order to plan a ma-
nipulation path. Figure 53.8 shows the initial position
and the destination of a nanowire. P
s1
and P
s2
are the
initial positions, and P
d1
and P
d2
are the destinations.
The nanowire rotates anti-clockwise and moves
downward if the starting pushing point is close to P
s2
.
Similarly, the nanowire rotates clockwise and moves
upward if the starting pushing point is close to P
s1
.
The starting pushing point can be determined by the
angle β as shown in Fig. 53.8.Ifβ>90
◦
, the starting
pushing point should be close to P
s2
. Otherwise, P
s1
.
Figure 53.9 shows the process to manipulate a nanowire
from its initial position to its destination. The manipu-
lation scheme of a nanowire has to go through a zigzag
strategy in order to position the nanowire with specified
orientation.
Part F 53.2