Naber G.L. The Geometry of Minkowski Spacetime. An Introduction to the Mathematics of the Special Theory of Relativity
Подождите немного. Документ загружается.

294 B Spinorial Objects
It is clear, however, that if “geometrical data” is to be understood in the
usual sense, then any such data would also be returned to its original value
after a rotation of 2π. The sign ambiguity in our geometrical representation
of spin vectors seems unavoidable, i.e., “essential”. Perhaps even more curi-
ous is the fact that a further rotation of the flag by 2π (i.e., a total rotation
of 4π) corresponds to θ =2π and so returns to us the original spin vector
ξ
A
= e
i(2π)
ξ
A
and the original null flag.
This state of affairs is quite unlike anything encountered in classical physics
or geometry. By analogy, one would have to imagine a “vector” and its geo-
metrical representation as a directed line segment with the property that, by
rotating the arrow through 2π about some axis one obtained the geometri-
cal representation of some other “vector”. But, of course, classical Euclidean
vector (and, more generally, tensor) analysis is built on the premise that this
cannot be the case. Indeed, a vector (tensor) is just a carrier of some repre-
sentation of the rotation group and the element of the rotation group corre-
sponding to rotation by 2π about any axis is the identity. This is, of course,
just a mathematical reflection of the conventional wisdom that rotating an
isolated physical system through 2π yields a system that is indistinguishable
from the first.
B.2 The Spinning Electron and Dirac’s Demonstration
“Conventional wisdom” has not fared well in modern physics so it may come
as no surprise to learn that there are, in fact, physical systems at the sub-
atomic level whose state is altered by a rotation of the system through 2π
about some axis, but is returned to its orginal value by a rotation through
4π. Indeed, any of the elementary particles in nature classified as a Fermions
(electrons, protons, neutrons, neutrinos, etc.) possess what the physicists call
“half-integer spin” and, as a consequence, their quantum mechanical descrip-
tions (“wave functions”) behave in precisely this way (a beautifully lucid and
elementary account of the physics involved here is available in Volume III
of the Feynman Lectures on Physics [Fe]). That the spin state of an elec-
tron behaves in this rather bizarre way has been known for many years, but,
because of the way in which quantum mechanics decrees that physical infor-
mation be extracted from an object’s wave function, was generally thought
to have no observable consequences. More recently it has been argued that it
is possible, in principle, to construct devices in which this behavior under ro-
tation is exhibited on a macroscopic scale (see [[AS], [KO] and [M]). These
constructions, however, depend on a rather detailed understanding of how
electrons are described in quantum mechanics. Fortunately, Paul Dirac has
devised a remarkably ingenious demonstration involving a perfectly mundane
macroscopic physical system in which “something” in the system’s state is
altered by rotation through 2π, but returned to its original value by a 4π
B.2 The Spinning Electron and Dirac’s Demonstration 295
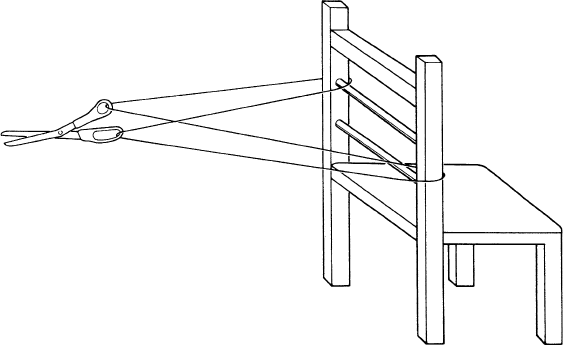
Fig. B.2.1
rotation. Next we describe the so-called “Dirac Scissors Problem” and, in the
next section, investigate the mathematics behind the phenomenon.
The demonstration involves a pair of scissors, a piece of (elastic) string
and a chair. Pass the string through one finger hole of the scissors, then
around one arm of the chair, then through the other fingerhole and around
the other arm of the chair and then tie the two ends of the string together (see
Figure B.2.1). The scissors is now rotated about its axis of symmetry through
2π (one complete revolution). The strings become entangled and the problem
is to disentangle them by moving only the string, holding the scissors and
chair fixed (the string needs to be elastic so it can be moved around these
objects, if desired). Try it! No amount of manuvering, simple or intricate,
will return the strings to their original, disentangled state. This, in itself, is
not particularly surprising perhaps, but now repeat the exercise, this time
rotating the scissors about its axis through two complete revolutions (4π).
The strings now appear even more hopelessly tangled, but looping the string
just once over the pointed end of the scissors (counterclockwise if that is the
way you turned the scissors) will return them to their original condition.
One is hard-pressed not to be taken aback by the result of this little
game, but, in fact, there are even more dramatic demonstrations of the same
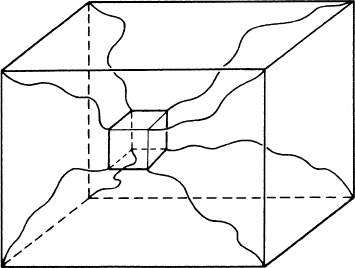
phenomenon. Imagine a cube (with its faces numbered, or painted different
colors, so that one can keep track of the rotations it experiences). Connect
each corner of the cube to the corresponding corner of a room with elastic
string (see Figure B.2.2). Rotate the cube by 2π about any axis. The strings
become tangled and no manipulation of the strings that leaves the cube (and
the room) fixed will untangle them. Rotate by another 2π about the same axis
for a total rotation of 4π and the tangles apparently get worse, but a carefully
chosen motion of the strings (alone) will return them to their original state
(the appropriate sequence of manuvers is shown in Figure 41.6 of [MTW]).
296 B Spinorial Objects
Fig. B.2.2
In each of these situations there is clearly “something different” about the
state of the system when it has undergone a rotation of 2π and when it has
been rotated by 4π. Observe also that, in each case, the “system” is more
than just an isolated pair of scissors or a cube, but includes, in some sense,
the way in which that object is “connected” to its surroundings. In the next
section we return to mathematics to show how all of this can be said precisely
and, indeed, how the mathematics itself might have suggested the possibility
of such phenomena and the relevance of spinors to their description.
B.3 Homotopy in the Rotation and Lorentz Groups
We begin by establishing some notation and terminology and briefly review-
ing some basic results related to the notion of “homotopy” in topology (a
good, concise source for all of the material we will need is [G], Sections 1–6).
Much of what we have to say will be true in an arbitrary topological space,
but this much generality is not required and tends to obscure fundamental
issues with tiresome technicalities. For this reason we shall restrict our at-
tention to the category of “connected topological manifolds”. A Hausdorff
topological space X is called an (n-dimensional) topological manifold if each
x ∈ X hasanopenneighborhoodinX that is homeomorphic to an open
set in R
n
(18.3 of [Wi] or (6.8) of [G]). A path in X is a continuous map
α :[0, 1] → X.Ifα(0) = x
0
and α(1) = x
1
,thenα is a path from x
0
to x
1
in X and X is path connected if such a path exists for every pair of points
x
0
,x
1
∈ X (27.1 of [Wi]).
Exercise B.3.1 Show that a topological manifold X that is connected (26.1
of [Wi]) is necessarily path connected. Hint: Fix an arbitrary x
0
∈ X and
show that the set of all x
1
∈ X for which there is a path in X from x
0
to x
1
is both open and closed.

B.3 Homotopy in the Rotation and Lorentz Groups 297
Henceforth, “space” will mean “connected topological manifold”.
Let α
0
and α
1
be two paths in X from x
0
to x
1
.Wesaythatα
0
and α
1
are (path ) homotopic (with endpoints fixed) if there exists a continuous map
H :[0, 1] × [0, 1] → X, called a homotopy from α
0
to α
1
, which satisfies
H(s, 0) = α
0
(s),
H(s, 1) = α
1
(s),
H(0,t)=x
0
,
H(1,t)=x
1
for all s and t in [0, 1]. In this case we write α
0
α
1
.Foreacht in [0,
1], α
t
(s)=H(s, t) defines a path in X from x
0
to x
1
and, intuitively, one
regards H as providing a “continuous deformation” of α
0
into α
1
through the
family {α
t
: t ∈ [0, 1]} of paths. is an equivalence relation on the set of all
paths from x
0
to x
1
and we denote the equivalence class of a path α by [α].
The inverse of a path α from x
0
to x
1
is the path α
−1
from x
1
to x
0
defined
by α
−1
(s)=α(1 − s). One verifies that α
0
α
1
implies α
−1
0
α
−1
1
so one
may define the inverse of a homotopy equivalence class by [α]
−1
=[α
−1
]. If
α is a path from x
0
to x
1
in X and β is a path from x
1
to x
2
in X, then the
product path βα from x
0
to x
2
is defined by
(βα)(s)=
)
α(2s), 0 ≤ s ≤
1
2
β(2s − 1),
1
2
≤ s ≤ 1.
Again, α
0
α
1
and β
0
β
1
imply β
0
α
0
β
1
α
1
so one may define the
product of the homotopy equivalence classes [α]and[β]by[β][α]=[βα],
provided the initial point of all the paths in [β] coincides with the terminal
point of all the paths in [α]. A loop at x
0
is a path from α(0) = x
0
to
α(1) = x
0
.Thenα
−1
is also a loop at x
0
.Moreover,ifβ is another loop at
x
0
,thenβα is defined and is also a loop at x
0
. Letting
π
1
(X, x
0
)={[α]: α is a loop at x
0
},
one finds that the operations [α]
−1
=[α
−1
]and[β][α]=[βα]giveπ
1
(X, x
0
)
the structure of a group with identity element [x
0
],wherewearehereusingx
0
to designate also the constant (or trivial) loop at x
0
defined by x
0
(s)=x
0
for
all s in [0, 1]. π
1
(X, x
0
) is called the fundamental group of X at x
0
.Ifx
0
and
x
1
are any two points in X and γ is a path in X from x
1
to x
0
(guaranteed to
exist by Exercise B.3.1), then [α] → [γ
−1
αγ] is an isomorphism of π
1
(X, x
0
)
onto π
1
(X, x
1
). For this reason one generally writes π
1
(X) for any one of the
isomorphic groups π
1
(X, x),x∈ X, and calls π
1
(X)thefundamental group
of X. Obviously, homeomorphic spaces have the same (that is, isomorphic)
fundamental groups. More generally, any two homotopically equivalent ((3.6)
of [G]) spaces have the same fundamental groups.
298 B Spinorial Objects
A space is said to be simply connected if its fundamental group is
isomorphic to the trivial group, i.e., if every loop is homotopic to the trivial
loop (somewhat loosely one says that “every closed curve can be shrunk to
a point”). Any Euclidean space R
n
is simply connected ((3.2) of [G]), as is
the n-sphere S
n
= {(x
1
,...,x
n+1
) ∈ R
n+1
:(x
1
)
2
+ ···+(x
n+1
)
2
=1} for
any n ≥ 2 (see Exercise B.3.5 and (4.13) of [G]). For n = 1, however, the
situation is different. Indeed, the fundamental group of the circle, π
1
(S
1
), is
isomorphic to the additive group Z of integers ((4.4) of [G]). Essentially, a
loop in S
1
is characterized homotopically by the (integer) number of times it
wraps around the circle (positive in one direction and negative in the other).
Exercise B.3.2 Let X and Y be two topological manifolds of dimensions n
and m respectively. Show that X × Y , provided with the product topology,
is a topological manifold of dimension n + m.
It is not difficult to show ((4.8) of [G]) that the fundamental group of a
product X ×Y is isomorphic to the direct product of the fundamental groups
of X and Y , i.e., π
1
(X ×Y )
∼
=
π
1
(X)×π
1
(Y ). In particular, the fundamental
group of the torus S
1
× S
1
is Z × Z.
In order to calculate several less elementary examples and, in the process,
get to the heart of the connection between homotopy and spinorial objects,
we require the notion of a “universal covering manifold”. As motivation let
us consider again the circle S
1
. This time it is convenient to describe S
1
as
the set of all complex numbers of modulus one, i.e., S
1
= {z ∈ C : z ¯z =1}.
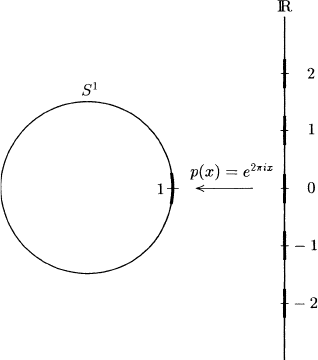
Define a map p : R → S
1
by p(θ)=e
2πθi
=cos(2πθ)+i sin(2πθ). Observe
that p is continuous, carries 0 ∈ R onto 1 ∈ S
1
and, in effect, “wraps” the
real line around the circle. Notice also that each z ∈ S
1
has a neighborhood
U in S
1
with the property that p
−1
(U) is a disjoint union of open sets in R,
each of which is mapped homeomorphically by p onto U (this is illustrated
for z = 1 in Figure B.3.1). In particular, the “fiber” p
−1
(z)aboveeachz ∈ S
1
is discrete. Now let us consider a homeomorphism φ of R onto itself which
“preserves the fibers of p”, i.e., satisfies p ◦φ = p,sothatr ∈ p
−1
(z) implies
φ(r) ∈ p
−1
(z). We claim that such a homeomorphism is uniquely determined
by its value at 0 ∈ R (or at any other single point in R), i.e., that if φ
1
and φ
2
are two p-fiber preserving homeomorphisms of R onto R and φ
1
(0) = φ
2
(0),
then φ
1
= φ
2
. To see this let E = {e ∈ R : φ
1
(e)=φ
2
(e)}.ThenE = ∅
since 0 ∈ E and, by continuity of φ
1
and φ
2
, E is closed in R.SinceR is
connected the proof will be complete if we can show that E is open. Thus,
let e be a point in E so that φ
1
(e)=φ
2
(e)=r for some r ∈ R.Notice
that p(φ
1
(e)) = p(r)andp(φ
1
(e)) = p(e)implythatp(e)=p(r). Now select
open neighborhoods V
e
and V
r
of e and r which p maps homeomorphically
onto a neighborhood U of p(e)=p(r). Let V = V
e
∩ φ
−1
1
(V
r
) ∩ φ
2
−1
(V
r
).
Then V is an open neighborhood of e contained in V
e
and with φ
1
(V ) ⊆ V
r
and φ
2
(V ) ⊆ V
r
.Foreachv ∈ V , p(φ
1
(v)) = p(φ
2
(v)) since both equal p(v).
But φ
1
(v),φ
2
(v) ∈ V
r
and, on V
r
,pis a homeomorphism so φ
1
(v)=φ
2
(v).
Thus, V ⊆ E so E is open. We find then that the homeomorphisms of R that
B.3 Homotopy in the Rotation and Lorentz Groups 299
preserve the fibers of p are completely determined by their values at 0. Since
the elements in a single fiber p
−1
(z) clearly differ by integers, the value of a
p-fiber preserving homeomorphism of R at 0 is an integer.
Fig. B.3.1
Exercise B.3.3 For each integer n let φ
n
: R → R be the translation of R
by n, i.e., φ
n
(y)=y + n for each y ∈ R. Show that the set C of p-fiber pre-
serving homeomorphisms of R is precisely {φ
n
: n ∈ Z}. Observe, moreover,
that φ
n
◦φ
m
= φ
n+m
so, as a group under the operation of composition, C is
isomorphic to the additive group Z of integers, i.e., to π
1
(S
1
).
Distilling the essential features out of this last example leads to the fol-
lowing definitions and results. Let X be a connected topological manifold.
A universal covering manifold for X consists of a pair (
˜
X,p), where
˜
X is
a simply connected topological manifold and p :
˜
X → X is a continuous
surjection (called the covering map) with the property that every x ∈ X has
an open neighborhood U such that p
−1
(U) is a disjoint union of open sets in
˜
X, each of which is mapped homeomorphically onto U by p. Every connected
topological manifold has a universal covering manifold (
˜
X,p) ((6.8) of [G])
that is essentially unique in the sense that if (
˜
X
,p
) is another, then there
exists a homeomorphism ψ of
˜
X
onto
˜
X such that p◦ψ = p
((6.4) of [G]). A
homeomorphism φ of
˜
X onto itself that preserves the fibers of p, i.e., satisfies
p◦φ = p, is called a covering transformation and the collection C of all such
is a group under composition. Moreover, C is isomorphic to π
1
(X) ((5.8) of
[G]). C is often easier to contend with than π
1
(X) and we will now use it to
compute the examples of real interest to us.
We shall construct these examples “backwards”, beginning with a space
˜
X
that will eventually be the universal covering manifold of the desired example
300 B Spinorial Objects
X, which is defined as a quotient (9.1 of [Wi]) of
˜
X.Firsttake
˜
X to be the
2-sphere S
2
= {(x
1
,x
2
,x
3
) ∈ R
3
:(x
1
)
2
+(x
2
)
2
+(x
3
)
2
=1} with the
topology it inherits as a subspace of R
3
.
Exercise B.3.4 Show that S
2
is a (Hausdorff, 2-dimensional, connected,
compact) topological manifold. Hint: Show, for example, that, on the upper
hemisphere {(x
1
,x
2
,x
3
) ∈ S
2
: x
3
> 0}, the projection map (x
1
,x
2
,x
3
) →
(x
1
,x
2
) is a homeomorphism onto the unit disc (x
1
)
2
+(x
2
)
2
< 1.
Exercise B.3.5 Show that S
n
is a (Hausdorff, n-dimensional, connected,
compact) topological manifold for any n ≥ 1.
Now define an equivalence relation ∼ on S
2
by identifying antipodal points,
i.e., if y, z ∈ S
2
,theny ∼ z if and only if z = ±y.Let[y]denotethe
equivalence class of y, i.e., [y]={y, −y} , and denote by RP
2
the set of all
equivalence classes. Define p : S
2
→ RP
2
by p(y)=[y] for every y ∈ S
2
and provide RP
2
with the quotient topology determined by p (i.e., U ⊆ RP
2
is open if and only if p
−1
(U)isopeninS
2
). RP
2
is then called the real
projective plane.
Exercise B.3.6 Show that RP
2
is a (Hausdorff, 2-dimensional, connected,
compact) topological manifold.
Now, since S
2
is simply connected and p : S
2
→ RP
2
clearly satisfies the
defining condition for a covering map and since universal covering manifolds
are unique we conclude that
<
RP
2
∼
=
S
2
.
But then π
1
(RP
2
) is isomorphic to the group of p-fiber preserving home-
omorphisms φ : S
2
→ S
2
of S
2
. We claim that this group contains pre-
cisely two elements, namely, the identity map (φ
0
(y)=y for every y ∈ S
2
)
and the antipodal map (φ
1
(y)=−y for every y ∈ S
2
). To see this ob-
serve that the fibers of p are just pairs of antipodal points {y, −y} so such
a φ must, for each y ∈ S
2
, satisfy either φ(y)=y or φ(y)=−y and so
S
2
= {y ∈ S
2
: φ(y)=y}∪{y ∈ S
2
: φ(y)=−y}. Since both of these sets
are obviously closed, connectivity of S
2
implies that one is ∅ and the other
is S
2
as required. Thus, π
1
(RP
2
) has precisely two elements and so must be
isomorphic to the group of integers mod 2, i.e.,
π
1
(RP
2
)
∼
=
Z
2
.
It will be important to us momentarily to observe that there is another way
to construct RP
2
. For this we carry out the identification of antipodal points
on S
2
in two stages. First identify points on the lower hemisphere (x
3
< 0)
with their antipodes on the upper hemisphere (x
3
> 0), leaving the equator
(x
3
= 0) fixed. At this point we have a copy of the closed upper hemisphere
(x
3
≥ 0) which, by projecting into the x
1
x
2
-plane, is homeomorphic to the
B.3 Homotopy in the Rotation and Lorentz Groups 301
closed disc (x
1
)
2
+(x
2
)
2
≤ 1. To obtain RP
2
we now need only identify
antipodal points on the boundary circle (x
1
)
2
+(x
2
)
2
=1.Thisparticular
construction can be refined to yield a “visualization” of RP
2
(see Chapter 1,
Volume 1, of [Sp
2
]). Visualization here is not easy, however. Indeed, given a
little thought, π
1
(RP
2
)=Z
2
is rather disconcerting. Think about some loop
in RP
2
that is not homotopically trivial, i.e., cannot be “shrunk to a point in
RP
2
” (presumably because it “surrounds a hole” in RP
2
). Traverse the loop
twice and (because 1+ 1 = 0 in Z
2
) the resulting loop must be homotopically
trivial. What happened to “the hole”? Think about it (especially in light of
our second construction of RP
2
).
Exercise B.3.7 Define real projective 3-space R P
3
by beginning with the
3-sphere S
3
= {(x
1
,x
2
,x
3
,x
4
) ∈ R
4
:(x
1
)
2
+(x
2
)
2
+(x
3
)
2
+(x
4
)
2
=1}
in R
4
and identifying antipodal points (y ∼±y). Note that
<
RP
3
= S
3
and
conclude that π
1
(RP
3
)
∼
=
Z
2
.AlsoobservethatRP
3
can be obtained by
identifying antipodal points on the boundary (x
1
)
2
+(x
2
)
2
+(x
3
)
2
=1ofthe
closed 3-dimensional ball (x
1
)
2
+(x
2
)
2
+(x
3
)
2
≤ 1.
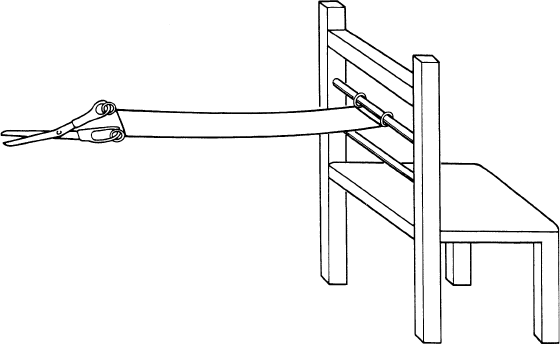
Fig. B.3.2
In an entirely analogous manner one defines RP
n
for any n ≥ 2andshows
that π
1
(RP
n
)
∼
=
Z
2
.
Exercise B.3.8 What happens when n =1?
Now let us return to the Dirac experiment. As with any good magic trick,
some of the paraphenalia is present only to divert the attention of the audi-
ence. Notice that none of the essential features of the apparatus are altered
if we imagine the strings glued (in an arbitrary manner) to the surface of an
elastic belt so that we may discard the strings altogether in favor of such a
302 B Spinorial Objects
belt connecting the scissors and the chair (see Figure B.3.2). Rotate the scis-
sors through 2π and the belt acquires one twist which cannot be untwisted
by moving the belt alone. Rotate through 4π and the belt has two twists that
can be removed by looping the belt once around the scissors.
Regarding the scissors as a rigid, solid body in 3-space we now introduce
what the physicists would call its “configuration space”. Fix some position of
the scissors in space as its “original” configuration. Any continuous motion of
the scissors in space will terminate with the scissors in some new configuration
which can be completely described by giving a point in R
3
(e.g., the location
of the scissors’ center of mass) and a rotation that would carry the original
orientation of the scissors onto its new orientation. This second element of
the description we specify by giving an element of the rotation group SO(3),
i.e., the set of all 3 × 3 unimodular orthogonal matrices (when viewed as a
subgroup of the Lorentz group we denoted SO(3) by R; see Section 1.3).
Thus, the configuration space of our scissors is taken to be R
3
× SO(3).
In configuration space R
3
× SO(3) a continuous motion of the scissors in
space is represented by a continuous curve. In particular, if the initial and fi-
nal configurations are the same, by a loop. Consider, for example, some point
x
0
in R
3
×SO(3), i.e., some initial configuration of the scissors. A continuous
rotation of the scissors through 2π about some axis is represented by a loop
at x
0
in R
3
×SO(3). Dirac’s ingenious demonstration permits us to actually
“see” this loop. Indeed, let us visualize Dirac’s apparatus with the belt having
one “twist”. Now imagine the scissors free to slide along the belt toward the
chair. As it does so it completes a rotation through 2π. When it reaches the
chair, translate it (without rotation) back to its original location and one has
traversed a loop in configuration space. Similarly, for a rotation through 4π.
Indeed, it should now be clear that any position of the belt can be viewed as
representing a loop in R
3
×SO(3) (slide the scissors along the belt then trans-
late it back). Now imagine yourself manipulating the belt (without moving
scissors or chair) in an attempt to untwist it. At each instant the position of
the belt represents a loop in R
3
×SO(3) so the process itself may be thought
of as a continuous sequence of loops (parametrized, say, by time t). If you
succeed with such a sequence of loops to untwist the belt you have “created”
a homotopy from the loop corresponding to the belt’s initial configuration to
the trivial loop (no rotation, i.e., no twists, at all). What Dirac seems to be
telling us then is that the loop in R
3
×SO(3) corresponding to a 2π rotation
is not homotopically trivial, but that corresponding to a rotation through 4π
is homotopic to the trivial loop.
It is clearly of some interest then to understand the “loop structure”, i.e.,
the fundamental group, of R
3
×SO(3). Notice that SO(3) does indeed have a
natural topology. The entries in a 3×3 matrix can be strung out into a column
matrix which can be viewed as a point in R
9
.Thus,SO(3) can be viewed as a
subset of R
9
and therefore inherits a topology as a subspace of R
9
.Aconsid-
erably more informative “picture” of SO(3) can be obtained as follows: Every
rotation of R
3
can be uniquely specified by an axis of rotation, an angle and a
B.3 Homotopy in the Rotation and Lorentz Groups 303
sense of rotation about the axis. We claim that all of this information can be
codified in a single object, namely, a vector
n
in R
3
of magnitude at most π.
Then the axis of rotation is the line along
n
, the angle of rotation is |
n
| and
the sense is determined by the “right-hand rule”. Notice that a rotation along
n
through an angle θ with π ≤ θ ≤ 2π is equivalent to a rotation along –
n
through 2π − θ so the restriction on |
n
| is necessary (although not quite
sufficient) to ensure that the correspondence between rotations and vectors
be one-to-one. The set of vectors
n
in R
3
with |
n
|≤π is just the closed ball
of radius π about the origin. However, a rotation about
n
through π is the
same as a rotation about –
n
through π so antipodal points on the bound-
ary of this ball represent the same rotation and therefore must be identified
in order that this correspondence with rotations be bijective. Carrying out
this identification yields, according to Exercise B.3.7, real projective 3-space
(topologically, the radius of the ball is irrelevant, of course). One can write out
analytically the one-to-one correspondence we have just described geometri-
cally to show that it is, in fact, continuous as a map from RP
3
to SO(3) ⊆ R
9
.
Since RP
3
is compact (being a continuous image of S
3
), we find that SO(3)
is homeomorphic to RP
3
.Inparticular,π
1
(SO(3))
∼
=
π
1
(RP
3
)
∼
=
Z
2
.Thus,
π
1
(R
3
× SO(3))
∼
=
π
1
(R
3
) × π
1
(SO(3))
∼
=
{0}×Z
2
so
π
1
(R
3
× SO(3))
∼
=
Z
2
and our suspicions are fully confirmed. In quite a remarkable way, the topol-
ogy of the rotation group is reflected in the physical situation described
by Dirac.
Exercise B.3.9 In Z
2
, 1+1+1=1 and 1+1+1+1=0. Moregenerally,
2n +1 = 1 and 2n = 0. What does this have to say about the scissors
experiment?
But what has all of this to do with spinors? The connection is perhaps
best appreciated by way of a brief digression into semantics. We have called
R
3
×SO(3) the “configuration space” of the object we have under consider-
ation (the scissors). In the classical study of rigid body dynamics, however,
it might equally well have been called its “state space” since, neglecting the
object’s (quite complicated) internal structure, it was (tacitly) assumed that
the physical state of the object was entirely determined by its configuration
in space. Suppressing the (topologically trivial and physically uninteresting)
translational part of the configuration (i.e., R
3
), the body’s “state” was com-
pletely specified by a point in SO(3). Based on our observations in Section 3.1,
we would phrase this somewhat more precisely by saying that all of the phys-
ically significant aspects of the object’s condition (as a rigid body) should be
describable as carriers of some representation of SO(3) (keep in mind that,
from our point of view, a rotated object is just the same object viewed from
a rotated frame of reference). We shall refer to such quantities (which depend
only on the object’s configuration and not on “how it got there”) as tensorial
objects.