Крылов Н.Н., ред. Начертательная геометрия
Подождите немного. Документ загружается.

вать как множество линии, конгруэнтных
профилю резца.
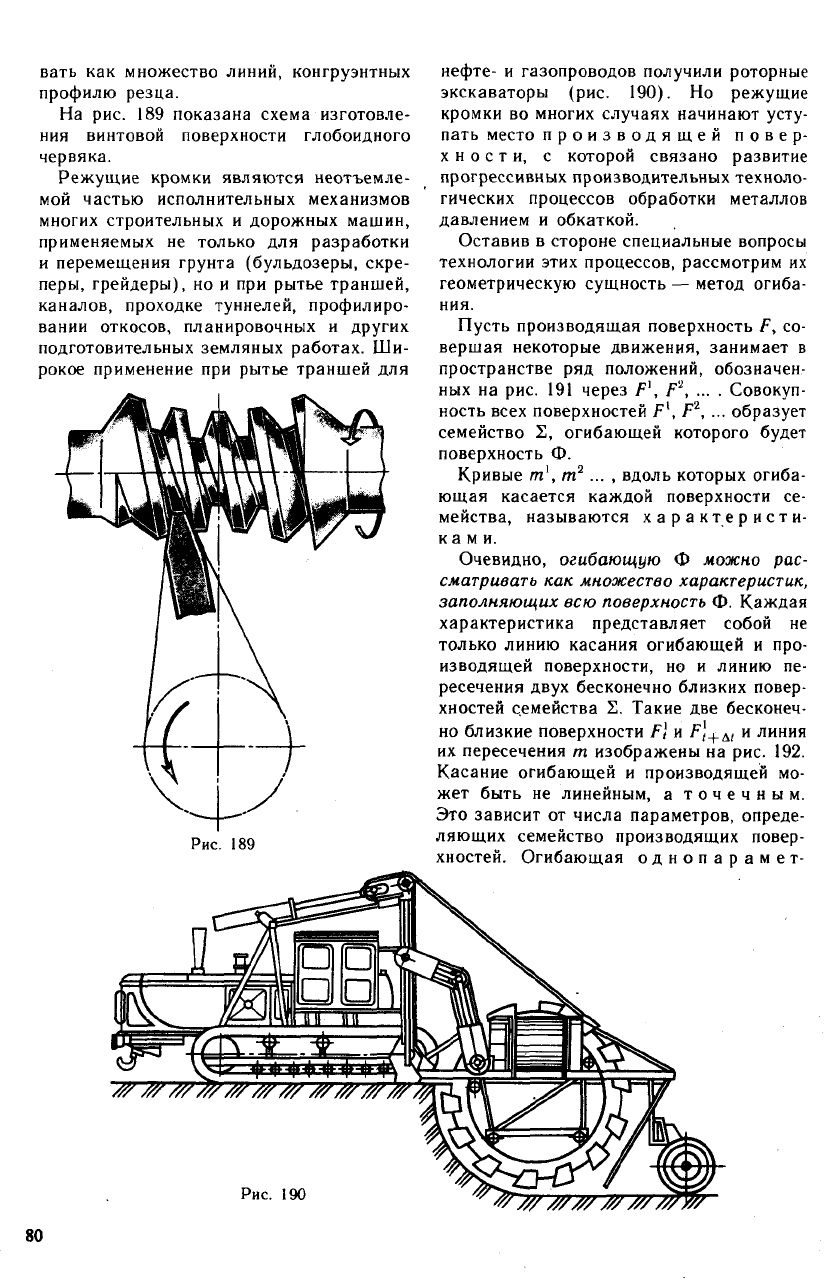
На рис. 189 показана схема изготовле-
ния винтовой поверхности глобоидного
червяка.
Режущие кромки являются неотъемле-
мой частью исполнительных механизмов
многих строительных и дорожных машин,
применяемых не только для разработки
и перемещения грунта (бульдозеры, скре-
перы, грейдеры), но и при рытье траншей,
каналов, проходке туннелей, профилиро-
вании откосов, планировочных и других
подготовительных земляных работах. Ши-
рокое применение при рытье траншей для
Рис. 189
нефте- и газопроводов получили роторные
экскаваторы (рис. 190). Но режущие
кромки во многих случаях начинают усту-
пать место производящей повер-
хности, с которой связано развитие
прогрессивных производительных техноло-
гических процессов обработки металлов
давлением и обкаткой.
Оставив в стороне специальные вопросы
технологии этих процессов, рассмотрим их
геометрическую сущность — метод огиба-
ния.
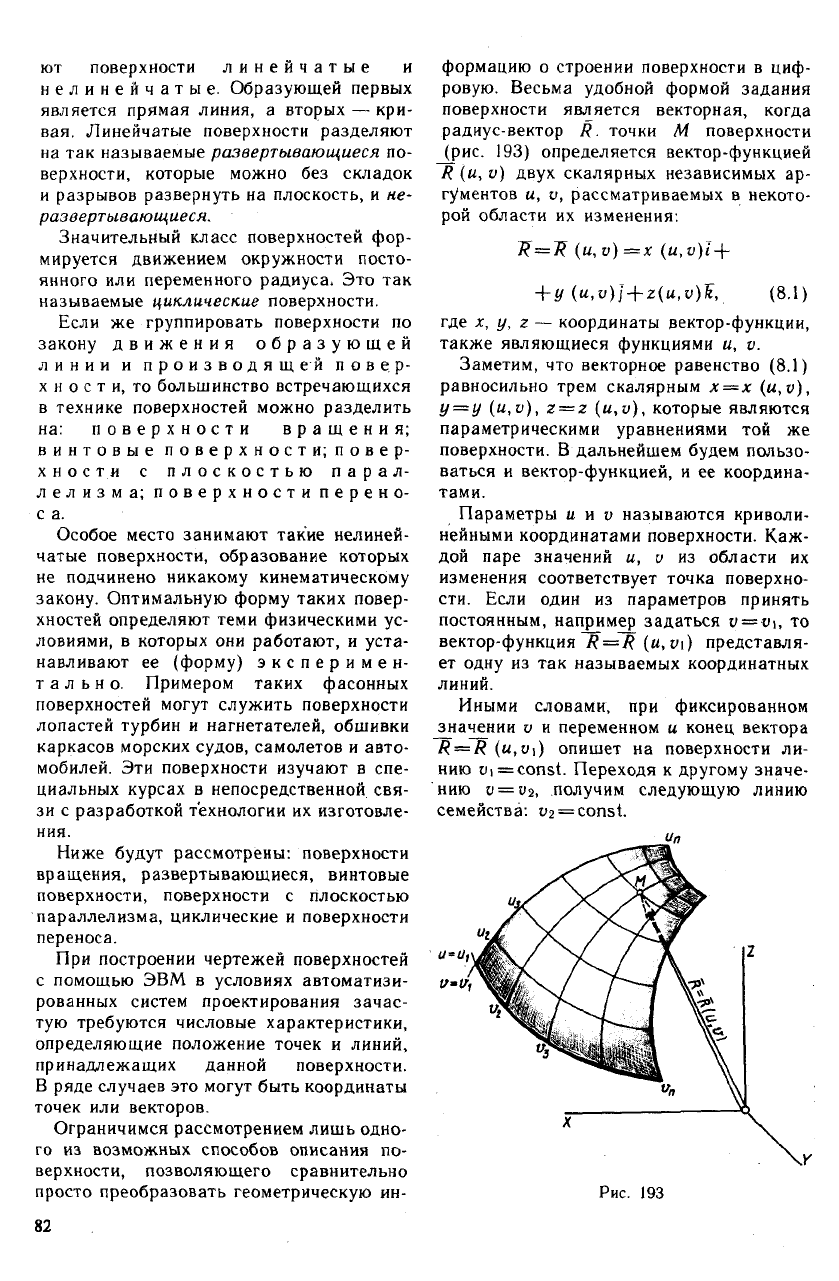
Пусть производящая поверхность F, со-
вершая некоторые движения, занимает в
пространстве ряд положений, обозначен-
ных на рис. 191 через F\ F... . Совокуп-
ность всех поверхностей F\ F'
1
, ... образует
семейство Е, огибающей которого будет
поверхность Ф.
Кривые т\ т
2
... , вдоль которых огиба-
ющая касается каждой поверхности се-
мейства, называются характеристи-
ками.
Очевидно, огибающую Ф можно рас-
сматривать как множество характеристик,
заполняющих всю поверхность Ф. Каждая
характеристика представляет собой не
только линию касания огибающей и про-
изводящей поверхности, но и линию пе-
ресечения двух бесконечно близких повер-
хностей семейства 2. Такие две бесконеч-
но близкие поверхности Fj и fJ+A, и линия
их пересечения m изображены на рис. 192.
Касание огибающей и производящей мо-
жет быть не линейным, а точечным.
Это зависит от числа параметров, опреде-
ляющих семейство производящих повер-
хностей. Огибающая однопарамет-
Рис. 190
/////////////////77//
80
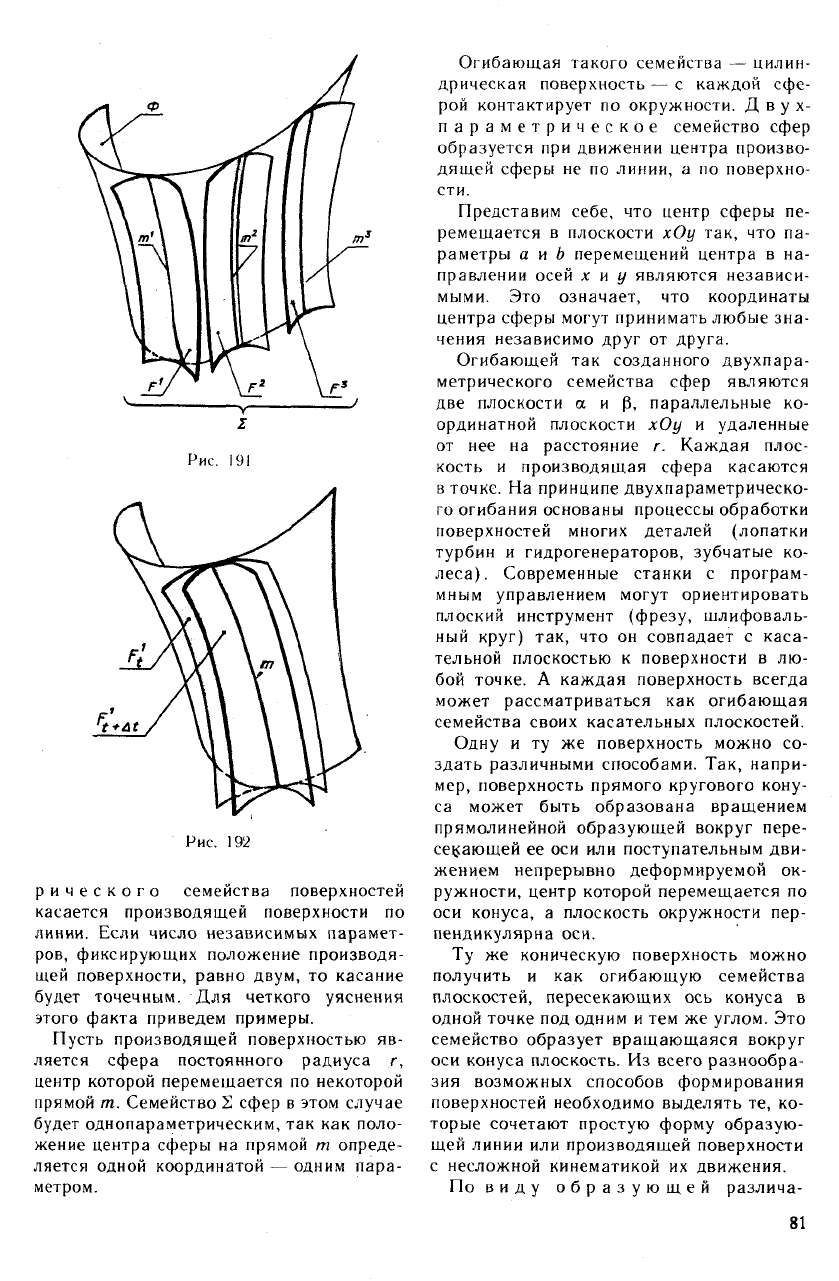
Рис. 191
Рис. 192
рического семейства поверхностей
касается производящей поверхности по
линии. Если число независимых парамет-
ров, фиксирующих положение производя-
щей поверхности, равно двум, то касание
будет точечным. Для четкого уяснения
этого факта приведем примеры.
Пусть производящей поверхностью яв-
ляется сфера постоянного радиуса г,
центр которой перемещается по некоторой
прямой т. Семейство 2 сфер в этом случае
будет однопараметрическим, так как поло-
жение центра сферы на прямой т опреде-
ляется одной координатой — одним пара-
метром.
Огибающая такого семейства — цилин-
дрическая поверхность — с каждой сфе-
рой контактирует по окружности. Д в у х-
параметрическое семейство сфер
образуется при движении центра произво-
дящей сферы не по линии, а по поверхно-
сти.
Представим себе, что центр сферы пе-
ремещается в плоскости хОу так, что па-
раметры а и b перемещений центра в на-
правлении осей х и у являются независи-
мыми. Это означает, что координаты
центра сферы могут принимать любые зна-
чения независимо друг от друга.
Огибающей так созданного двухпара-
метрического семейства сфер являются
две плоскости а и (3, параллельные ко-
ординатной плоскости хОу и удаленные
от нее на расстояние г. Каждая плос-
кость и производящая сфера касаются
в точке. На принципе двухпараметрическо-
го огибания основаны процессы обработки
поверхностей многих деталей (лопатки
турбин и гидрогенераторов, зубчатые ко-
леса). Современные станки с програм-
мным управлением могут ориентировать
плоский инструмент (фрезу, шлифоваль-
ный круг) так, что он совпадает с каса-
тельной плоскостью к поверхности в лю-
бой точке. А каждая поверхность всегда
может рассматриваться как огибающая
семейства своих касательных плоскостей.
Одну и ту же поверхность можно со-
здать различными способами. Так, напри-
мер, поверхность прямого кругового кону-
са может быть образована вращением
прямолинейной образующей вокруг пере-
секающей ее оси или поступательным дви-
жением непрерывно деформируемой ок-
ружности, центр которой перемещается по
оси конуса, а плоскость окружности пер-
пендикулярна оси.
Ту же коническую поверхность можно
получить и как огибающую семейства
плоскостей, пересекающих ось конуса в
одной точке под одним и тем же углом. Это
семейство образует вращающаяся вокруг
оси конуса плоскость. Из всего разнообра-
зия возможных способов формирования
поверхностей необходимо выделять те, ко-
торые сочетают простую форму образую-
щей линии или производящей поверхности
с несложной кинематикой их движения.
По виду образующей различа-
81
ют поверхности линейчатые и
нелинейчатые. Образующей первых
является прямая линия, а вторых — кри-
вая. Линейчатые поверхности разделяют
на так называемые развертывающиеся по-
верхности, которые можно без складок
и разрывов развернуть на плоскость, и не-
развертывающиеся.
Значительный класс поверхностей фор-
мируется движением окружности посто-
янного или переменного радиуса, Это так
называемые циклические поверхности.
Если же группировать поверхности по
закону движения образующей
линии и производящей повер-
хности, то большинство встречающихся
в технике поверхностей можно разделить
на: поверхности вращения;
винтовые поверхности; повер-
хности с плоскостью парал-
лелизма; поверхности перено-
с а.
Особое место занимают такие нелиней-
чатые поверхности, образование которых
не подчинено никакому кинематическому
закону. Оптимальную форму таких повер-
хностей определяют теми физическими ус-
ловиями, в которых они работают, и уста-
навливают ее (форму) эксперимен-
тально. Примером таких фасонных
поверхностей могут служить поверхности
лопастей турбин и нагнетателей, обшивки
каркасов морских судов, самолетов и авто-
мобилей. Эти поверхности изучают в спе-
циальных курсах в непосредственной свя-
зи с разработкой технологии их изготовле-
ния.
Ниже будут рассмотрены: поверхности
вращения, развертывающиеся, винтовые
поверхности, поверхности с плоскостью
параллелизма, циклические и поверхности
переноса.
При построении чертежей поверхностей
с помощью ЭВМ в условиях автоматизи-
рованных систем проектирования зачас-
тую требуются числовые характеристики,
определяющие положение точек и линий,
принадлежащих данной поверхности.
В ряде случаев это могут быть координаты
точек или векторов.
Ограничимся рассмотрением лишь одно-
го из возможных способов описания по-
верхности, позволяющего сравнительно
просто преобразовать геометрическую ин-
формацию о строении поверхности в циф-
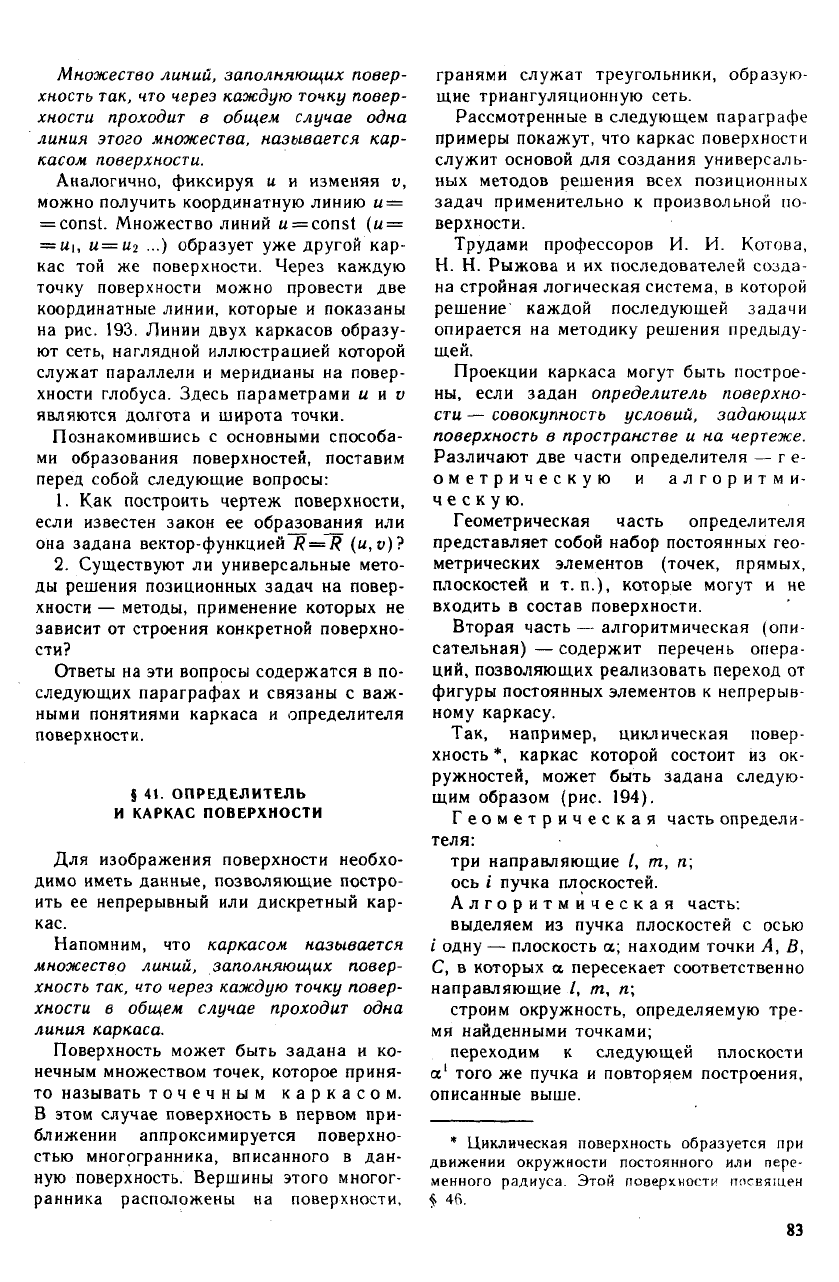
ровую. Весьма удобной формой задания
поверхности является векторная, когда
радиус-вектор R. точки М поверхности
_(рис. 193) определяется вектор-функцией
R (и, у) двух скалярных независимых ар-
гументов и, v, рассматриваемых в некото-
рой области их изменения:
R=~R (u,v)=x (u,v)i+
+ у (u,v)] + z(u,v)~k, (8.1)
где х, у, z — координаты вектор-функции,
также являющиеся функциями и, v.
Заметим, что векторное равенство (8.1)
равносильно трем скалярным х = х (u,v),
у=у (и,v), z = z (u,v), которые являются
параметрическими уравнениями той же
поверхности. В дальнейшем будем пользо-
ваться и вектор-функцией, и ее координа-
тами.
Параметры и и у называются криволи-
нейными координатами поверхности. Каж-
дой паре значений и, v из области их
изменения соответствует точка поверхно-
сти. Если один из параметров принять
постоянным, например задаться v = ui, то
вектор-функция R = R (и, oi) представля-
ет одну из так называемых координатных
линий.
Иными словами, при фиксированном
^начении v и переменном и конец вектора
R = R (u,v\) опишет на поверхности ли-
нию
Ui
= const. Переходя к другому значе-
нию v = vn, получим следующую линию
семейства:
i>
2
= const.
и
п
X /Ч/v
Ul
A/C /So*
чШ* J
»п \
X N.
Рис. 258
82
Множество линий, заполняющих повер-
хность
так, что
через каждую точку повер-
хности проходит в общем случае одна
линия этого множества, называется кар-
касом поверхности.
Аналогично, фиксируя и и изменяя и,
можно получить координатную линию и —
= const. Множество линий
M
= const (и =
=
Mi,
и=и
2
...) образует уже другой кар-
кас той же поверхности. Через каждую
точку поверхности можно провести две
координатные линии, которые и показаны
на рис. 193. Линии двух каркасов образу-
ют сеть, наглядной иллюстрацией которой
служат параллели и меридианы на повер-
хности глобуса. Здесь параметрами и и v
являются долгота и широта точки.
Познакомившись с основными способа-
ми образования поверхностей, поставим
перед собой следующие вопросы:
1. Как построить чертеж поверхности,
если известен закон ее образования или
она задана вектор-функцией R = R (u,v)?
2. Существуют ли универсальные мето-
ды решения позиционных задач на повер-
хности — методы, применение которых не
зависит от строения конкретной поверхно-
сти?
Ответы на эти вопросы содержатся в по-
следующих параграфах и связаны с важ-
ными понятиями каркаса и определителя
поверхности.
$ 41. ОПРЕДЕЛИТЕЛЬ
И КАРКАС ПОВЕРХНОСТИ
Для изображения поверхности необхо-
димо иметь данные, позволяющие постро-
ить ее непрерывный или дискретный кар-
кас.
Напомним, что каркасом называется
множество линий, заполняющих повер-
хность
так, что
через каждую точку повер-
хности в общем случае проходит одна
линия каркаса.
Поверхность может быть задана и ко-
нечным множеством точек, которое приня-
то называть точечным каркасом.
В этом случае поверхность в первом при-
ближении аппроксимируется поверхно-
стью многогранника, вписанного в дан-
ную поверхность. Вершины этого многог-
ранника расположены на поверхности,
гранями служат треугольники, образую-
щие триангуляционную сеть.
Рассмотренные в следующем параграфе
примеры покажут, что каркас поверхности
служит основой для создания универсаль-
ных методов решения всех позиционных
задач применительно к произвольной по-
верхности.
Трудами профессоров И. И. Котова,
Н. Н. Рыжова и их последователей созда-
на стройная логическая система, в которой
решение каждой последующей задачи
опирается на методику решения предыду-
щей.
Проекции каркаса могут быть построе-
ны, если задан определитель поверхно-
сти
— совокупность условий, задающих
поверхность в пространстве и на чертеже.
Различают две части определителя — ге-
ометрическую и алгоритми-
ческую.
Геометрическая часть определителя
представляет собой набор постоянных гео-
метрических элементов (точек, прямых,
плоскостей и т.п.), которые могут и не
входить в состав поверхности.
Вторая часть — алгоритмическая (опи-
сательная) — содержит перечень опера-
ций, позволяющих реализовать переход от
фигуры постоянных элементов к непрерыв-
ному каркасу.
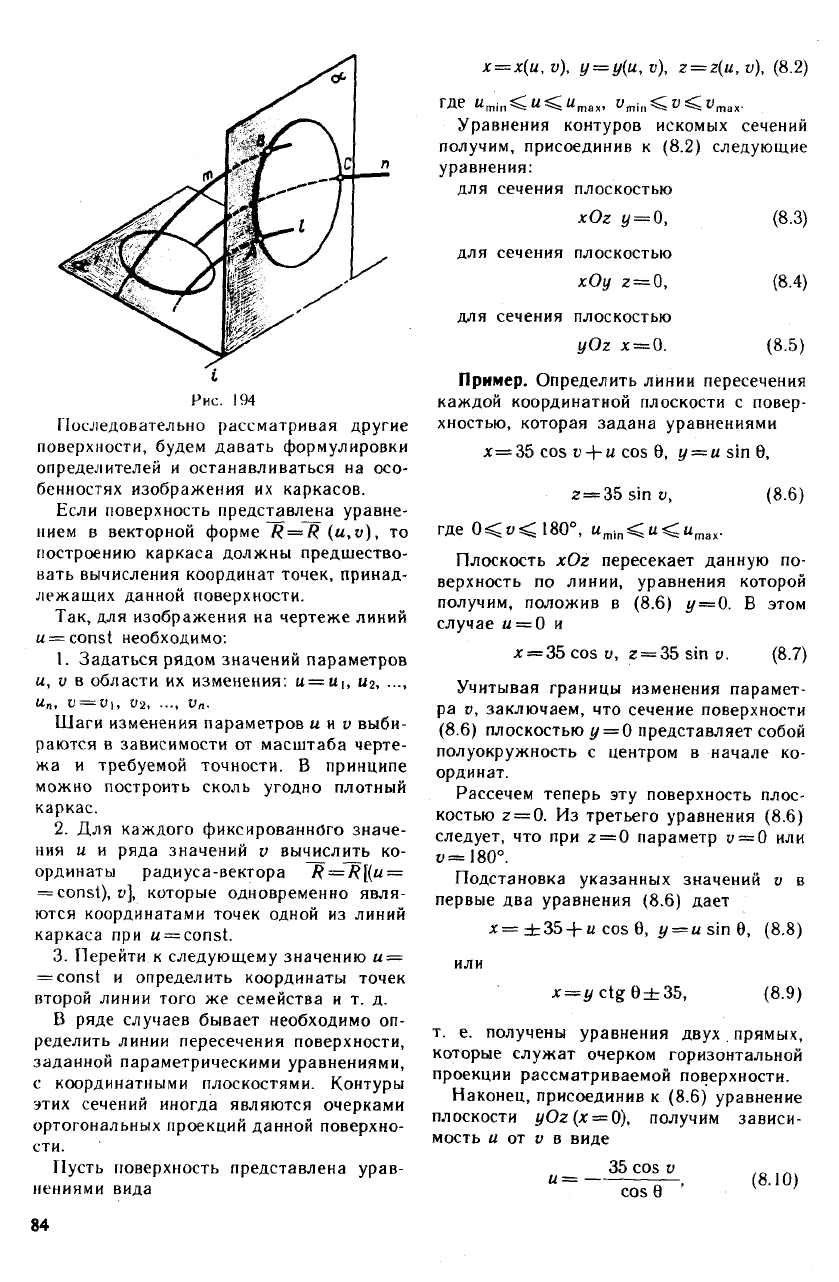
Так, например, циклическая повер-
хность *, каркас которой состоит из ок-
ружностей, может быть Задана следую-
щим образом (рис. 194).
Геометрическая часть определи-
теля:
три направляющие I, т, п;
ось i пучка плоскостей.
Алгоритмическая часть:
выделяем из пучка плоскостей с осью
i одну — плоскость а; находим точки А, В,
С, в которых а пересекает соответственно
направляющие /, т, и;
строим окружность, определяемую тре-
мя найденными точками;
переходим к следующей плоскости
а' того же пучка и повторяем построения,
описанные выше.
* Циклическая поверхность образуется при
движении окружности постоянного или пере-
менного радиуса. Этой поверхности посвящен
$ 46.
83
x—x(u, v), у = у(и, v), z = z(u, v), (8.2)
Рис. 194
Последовательно рассматривая другие
поверхности, будем давать формулировки
определителей и останавливаться на осо-
бенностях изображения их каркасов.
Если поверхность представлена уравне-
нием в векторной форме R = R (u,v), то
построению каркаса должны предшество-
вать вычисления координат точек, принад-
лежащих данной поверхности.
Так, для изображения на чертеже линий
u = const необходимо:
1. Задаться рядом значений параметров
и, v в области их изменения:
u
= tti, ы
2
, ••-,
И
П
,
V
= VU У
2
VN•
Шаги изменения параметров и и у выби-
раются в зависимости от масштаба черте-
жа и требуемой точности. В принципе
можно построить сколь угодно плотный
каркас.
2. Для каждого фиксированного значе-
ния и и ряда значений v вычислить ко-
ординаты радиуса-вектора R = R[(u —
= const), и], которые одновременно явля-
ются координатами точек одной из линий
каркаса при
M
= const.
3. Перейти, к следующему значению и —
= const и определить координаты точек
второй линии того же семейства и т. д.
В ряде случаев бывает необходимо оп-
ределить линии пересечения поверхности,
заданной параметрическими уравнениями,
с координатными плоскостями. Контуры
этих сечений иногда являются очерками
ортогональных проекций данной поверхно-
сти.
Пусть поверхность представлена урав-
нениями вида
где и
т1п
<ы<к
та
„
Уравнения контуров искомых сечений
получим, присоединив к (8.2) следующие
уравнения:
для сечения плоскостью
xOz у = О,
для сечения плоскостью
хОу 2 = 0,
для сечения плоскостью
yOz jc = 0.
(8.3)
(8.4)
(8.5)
Пример. Определить линии пересечения
каждой координатной плоскости с повер-
хностью, которая задана уравнениями
х=35 cos v -\-и cos 9, у—
и
sin 8,
2 = 35 sin v, (8.6)
где 0<у<180°, u
mln
<и<«„,„.
Плоскость xOz пересекает данную по-
верхность по линии, уравнения которой
получим, положив в (8.6) у —
О.
В этом
случае и = 0 и
л: = 35 cos v, z = 35 sin v. (8.7)
Учитывая границы изменения парамет-
ра v, заключаем, что сечение поверхности
(8.6) плоскостью у — 0 представляет собой
полуокружность с центром в начале ко-
ординат.
Рассечем теперь эту поверхность плос-
костью z = 0. Из третьего уравнения (8.6)
следует, что при 2 = 0 параметр у = 0 или
v =180°.
Подстановка указанных значений v в
первые два уравнения (8.6) дает
*= ±35+и cos в, у =
и
sin 9, (8.8)
или
х=у ctg 9±35,
(8.9)
т. е. получены уравнения двух. прямых,
которые служат очерком горизонтальной
проекции рассматриваемой поверхности.
Наконец, присоединив к (8.6) уравнение
плоскости y0z(x = 0), получим зависи-
мость и от у в виде
и =
35 cos v
cos в '
(8.10)
84
а после подстановки (8.10) во второе
уравнение (8.6) будем иметь
у=
— 35
tg 0 cos v и г =
35
sin У.
(8.11,)
Это параметрические уравнения эллипса.
Итак, заданные уравнения (8.6) описы-
вают цилиндрическую поверхность, на-
правляющей которой может служить по-
луокружность, расположенная в плоско-
сти xOz, а образующие должны бьпь
параллельны тем прямым, что принадле-
жат плоскости хОу и определяются урав-
нением (8.9).
§ 42. ПОВЕРХНОСТИ ВРАЩЕНИЯ
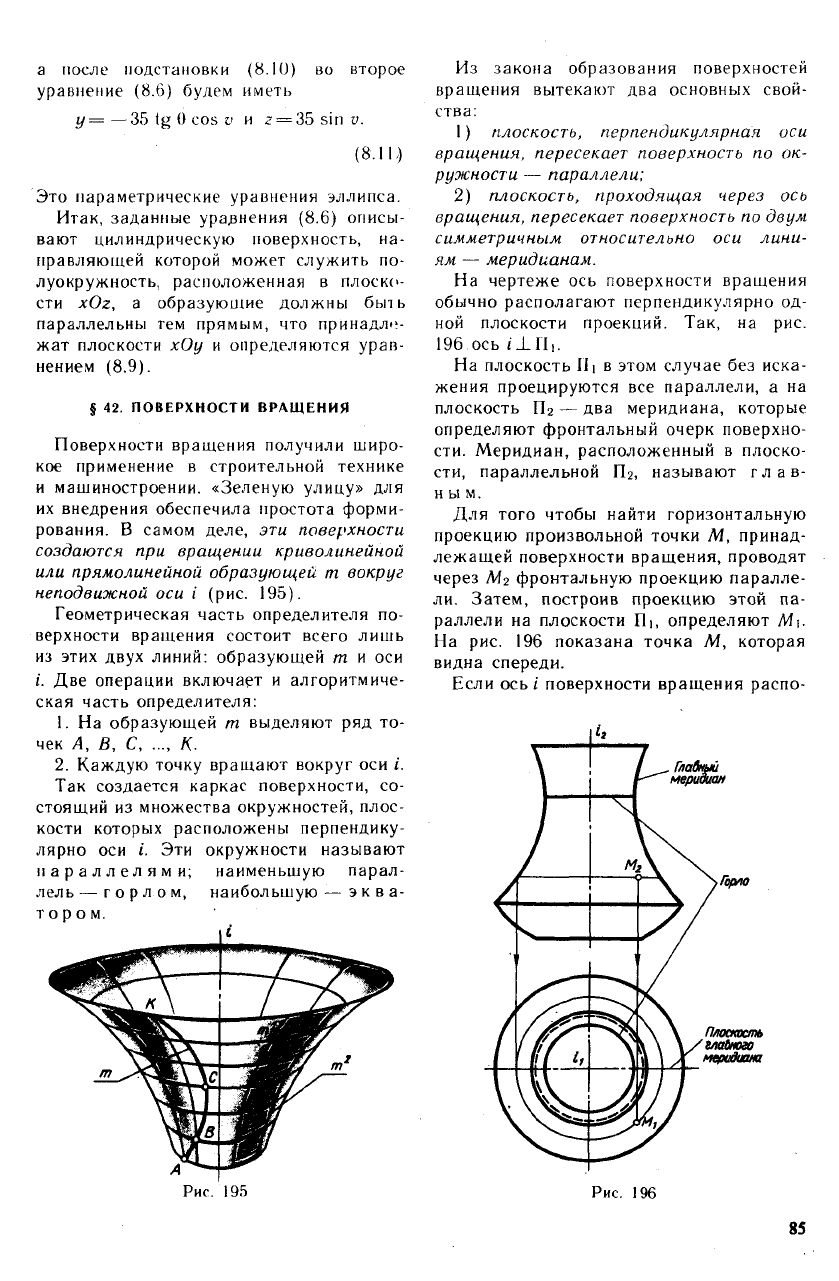
Поверхности вращения получили широ-
кое применение в строительной технике
и машиностроении. «Зеленую улицу» для
их внедрения обеспечила простота форми-
рования. В самом деле, эти поверхности
создаются при вращении криволинейной
или прямолинейной образующей m вокруг
неподвижной оси i (рис. 195).
Геометрическая часть определителя по-
верхности вращения состоит всего лишь
из этих двух линий: образующей m и оси
i. Две операции включает и алгоритмиче-
ская часть определителя:
1. На образующей m выделяют ряд то-
чек А, В, С, ..., К.
2. Каждую точку вращают вокруг оси г.
Так создается каркас поверхности, со-
стоящий из множества окружностей, плос-
кости которых расположены перпендику-
лярно оси г. Эти окружности называют
параллелями; наименьшую парал-
лель— горлом, наибольшую — эква-
тором.
Рис. 195
Из закона образования поверхностей
вращения вытекают два основных свой-
ства:
1) плоскость, перпендикулярная оси
вращения, пересекает поверхность по ок-
ружности — параллели;
2) плоскость, проходящая через ось
вращения, пересекает поверхность по двум
симметричным относительно оси лини-
ям — меридианам.
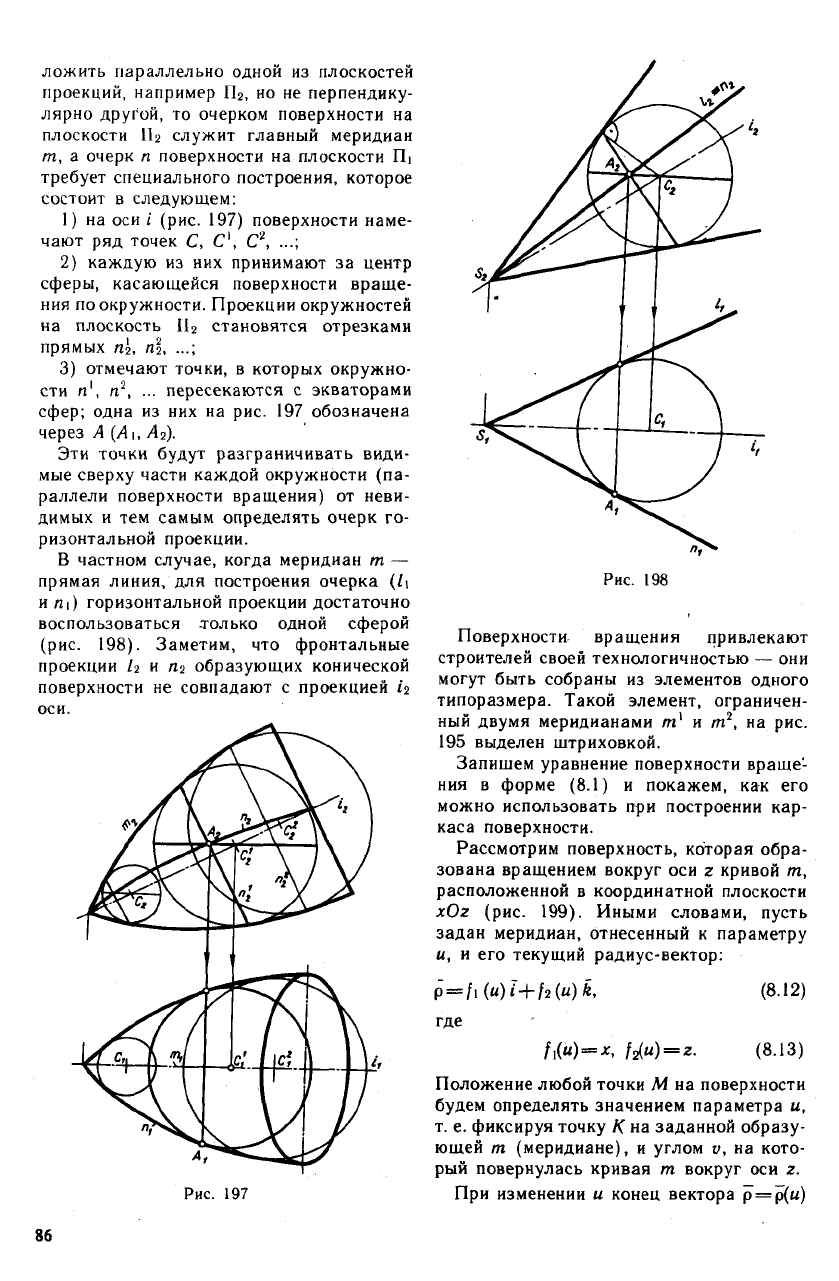
На чертеже ось поверхности вращения
обычно располагают перпендикулярно од-
ной плоскости проекций. Так, на рис.
196 ось /±11,.
На плоскость Hi в этом случае без иска-
жения проецируются все параллели, а на
плоскость Пг — два меридиана, которые
определяют фронтальный очерк поверхно-
сти. Меридиан, расположенный в плоско-
сти, параллельной Пг, называют глав-
ным.
Для того чтобы найти горизонтальную
проекцию произвольной точки М, принад-
лежащей поверхности вращения, проводят
через М
2
фронтальную проекцию паралле-
ли. Затем, построив проекцию этой па-
раллели на плоскости Пь определяют Ми
На рис. 196 показана точка М, которая
видна спереди.
Если ось г поверхности вращения распо-
8S
ложить параллельно одной из плоскостей
проекций, например П
2
, но не перпендику-
лярно другой, то очерком поверхности на
плоскости 1Ь служит главный меридиан
т, а очерк п поверхности на плоскости П]
требует специального построения, которое
состоит в следующем:
1) на оси i (рис. 197) поверхности наме-
чают ряд точек С, С\ С
2
, ...;
2) каждую из них принимают за центр
сферы, касающейся поверхности враще-
ния по окружности. Проекции окружностей
на плоскость 11
2
становятся отрезками
прямых n
2
, "г, ...;
3) отмечают точки, в которых окружно-
сти ft
1
, ft
2
, ... пересекаются с экваторами
сфер; одна из них на рис. 197 обозначена
через Л (Л,, Л
2
).
Эти точки будут разграничивать види-
мые сверху части каждой окружности (па-
раллели поверхности вращения) от неви-
димых и тем самым определять очерк го-
ризонтальной проекции.
В частном случае, когда меридиан т —
прямая линия, для построения очерка (/i
и ni) горизонтальной проекции достаточно
воспользоваться .только одной сферой
(рис. 198). Заметим, что фронтальные
проекции /
2
и п
2
образующих конической
поверхности не совпадают с проекцией i
2
Поверхности вращения привлекают
строителей своей технологичностью — они
могут быть собраны из элементов одного
типоразмера. Такой элемент, ограничен-
ный двумя меридианами от
1
и т
2
, на рис.
195 выделен штриховкой.
Запишем уравнение поверхности враще-
ния в форме (8.1) и покажем, как его
можно использовать при построении кар-
каса поверхности.
Рассмотрим поверхность, которая обра-
зована вращением вокруг оси z кривой т,
расположенной в координатной плоскости
хОг (рис. 199). Иными словами, пусть
задан меридиан, отнесенный к параметру
и, и его текущий радиус-вектор:
р = /,(ф
г
+Ы")*. (8.12)
где
/,(«)-*. Ш = г. (8.13)
Положение любой точки М на поверхности
будем определять значением параметра и,
т. е. фиксируя точку К на заданной образу-
ющей т (меридиане), и углом v, на кото-
рый повернулась кривая т вокруг оси г.
При изменении и конец вектора р = р(и)
86
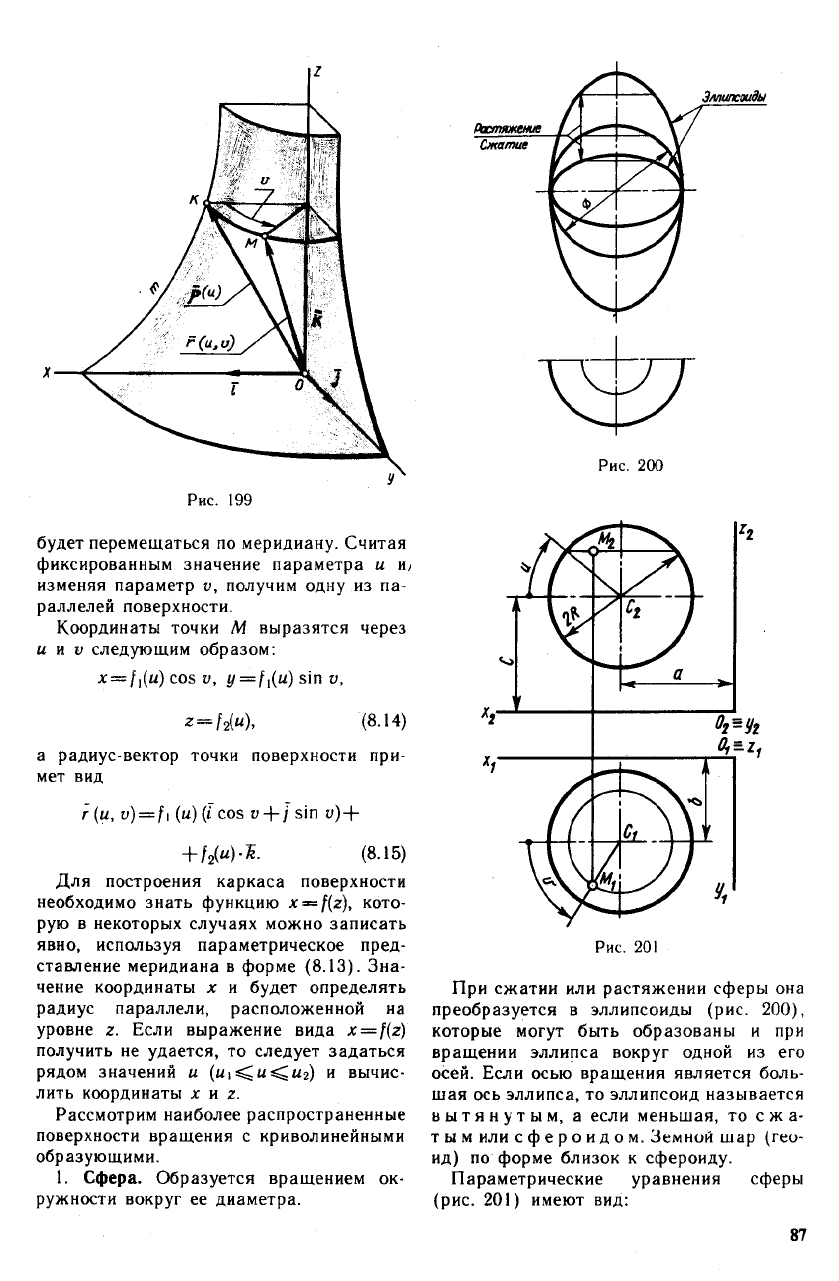
будет перемещаться по меридиану. Считая
фиксированным значение параметра и и,
изменяя параметр v, получим одну из па-
раллелей поверхности.
Координаты точки М выразятся через
и и v следующим образом:
X
—
f|(ы)
cos v, y=f
l
(u) sin V,
г = (8-14)
а радиус-вектор точки поверхности при-
мет вид
г (u, v) — f
|
(u){i cos v + j sin +
+ f
2
(u)-£. (8.15)
Для построения каркаса поверхности
необходимо знать функцию x = f(z), кото-
рую в некоторых случаях можно записать
явно, используя параметрическое пред-
ставление меридиана в форме (8.13). Зна-
чение координаты х и будет определять
радиус параллели, расположенной на
уровне 2. Если выражение вида x = f(z)
получить не удается, то следует задаться
рядом значений и (MI<U^M2) И вычис-
лить координаты х и г.
Рассмотрим наиболее распространенные
поверхности вращения с криволинейными
образующими.
1. Сфера. Образуется вращением ок-
ружности вокруг ее диаметра.
При сжатии или растяжении сферы она
преобразуется в эллипсоиды (рис. 200),
которые могут быть образованы и при
вращении эллипса вокруг одной из его
осей. Если осью вращения является боль-
шая ось эллипса, то эллипсоид называется
вытянутым, а если меньшая, то сжа-
тым или сфероидом. Земной шар (гео-
ид) по форме близок к сфероиду.
Параметрические уравнения сферы
(рис. 201) имеют вид:
87
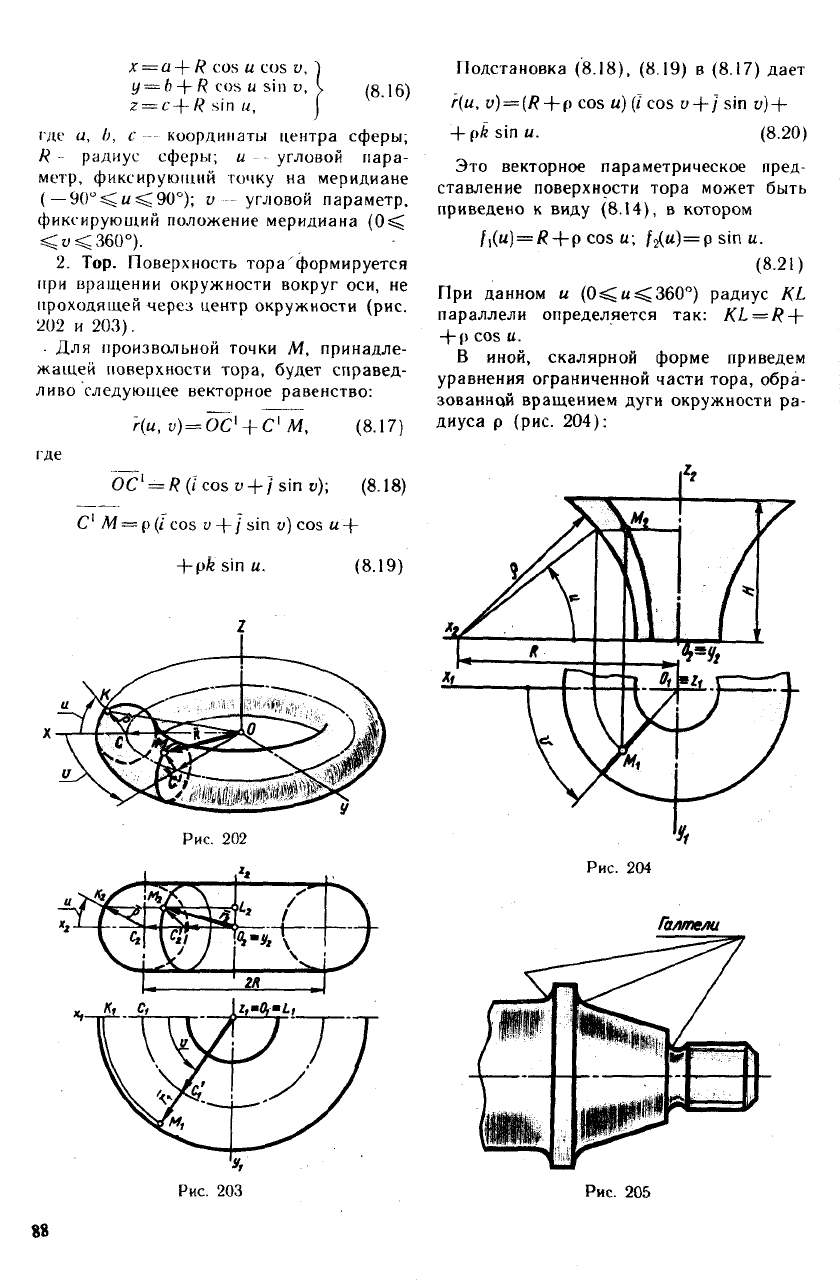
х = а + R cos и cos и, "1
y — b-'rR cos u sin v, ч (816)
Z
= C-\-R sin u, j
где и, l>, с координаты центра сферы;
R радиус сферы; «--угловой пара-
метр, фиксирующий точку на меридиане
( — 90° ^ыг^ 90°); v -- угловой параметр,
фиксирующий положение меридиана (0^
<у<360°).
2. Тор. Поверхность тора формируется
при вращении окружности вокруг оси, не
проходящей через центр окружности (рис.
202 и 203).
• Для произвольной точки М, принадле-
жащей поверхности тора, будет справед-
ливо следующее векторное равенство:
r(u,v) = OC
l
+ C
l
M, (8.17)
где
ОС
1
= R(i cos v + ] sin к); (8.18)
С
1
M
—
()(i cos
и
+ / sin v) cos
и -f-
-fpfcsin u. (8.19)
2
Подстановка (8.18), (8.19) в (8.17) дает
r(u, u) = (/?-|-p cos и) (i cos v + / sin u) +
+
(>k
sin u. (8.20)
Это векторное параметрическое пред-
ставление поверхности тора может быть
приведено к виду (8.14), в котором
f
]
(u) = R-\-р cos и\
f<£u)
= p sin и.
(8.21)
При данном и (0^«<360°) радиус KL
параллели определяется так: KL=R-j-
+ р cos и.
В иной, скалярной форме приведем
уравнения ограниченной части тора, обра-
зованной вращением дуги окружности ра-
диуса р (рис. 204):
Галтели
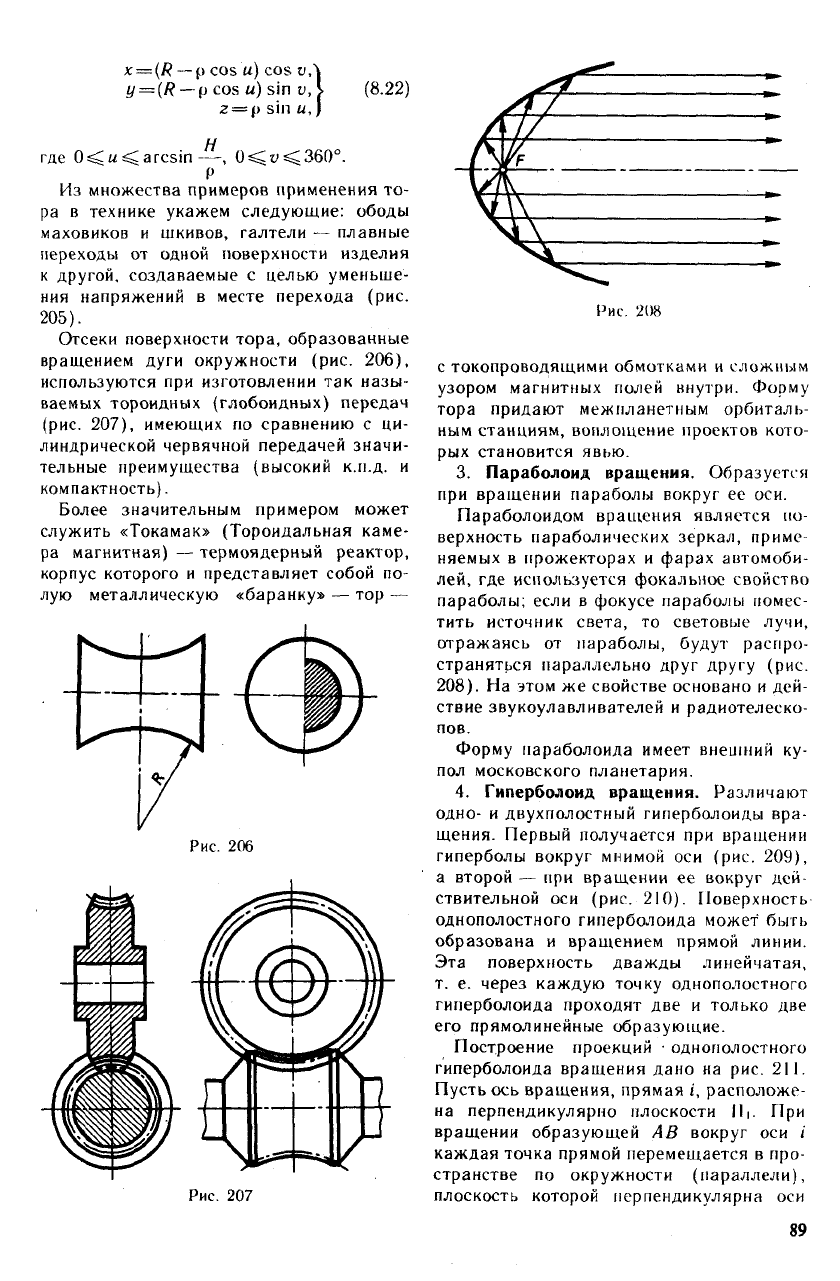
x — (R
—
P cos M) COS U,]
y = (R
— p
cos
z--
H
is u) cos и Л
os и) sin v, I
z = p sin u,)
(8.22)
Рис. 206
где 0<w<arcsin—, 0<y<360°.
P
Из множества примеров применения то-
ра в технике укажем следующие: ободы
маховиков и шкивов, галтели — плавные
переходы от одной поверхности изделия
к другой, создаваемые с целью уменьше-
ния напряжений в месте перехода (рис.
205).
Отсеки поверхности тора, образованные
вращением дуги окружности (рис. 206),
используются при изготовлении так назы-
ваемых тороидных (глобоидных) передач
(рис. 207), имеющих по сравнению с ци-
линдрической червячной передачей значи-
тельные преимущества (высокий к.п.д. и
компактность).
Более значительным примером может
служить «Токамак» (Тороидальная каме-
ра магнитная) — термоядерный реактор,
корпус которого и представляет собой по-
лую металлическую «баранку» — тор —
Рис.
258
Рис. 208
с токопроводящими обмотками и сложным
узором магнитных полей внутри. Форму
тора придают межпланетным орбиталь-
ным станциям, воплощение проектов кото-
рых становится явью.
3. Параболоид вращения. Образуется
при вращении параболы вокруг ее оси.
Параболоидом вращения является по-
верхность параболических зеркал, приме-
няемых в прожекторах и фарах автомоби-
лей, где используется фокальное свойство
параболы; если в фокусе параболы помес-
тить источник света, то световые лучи,
отражаясь от параболы, будут распро-
страняться параллельно друг другу (рис.
208). На этом же свойстве основано и дей-
ствие звукоулавливателей и радиотелеско-
пов.
Форму параболоида имеет внешний ку-
пол московского планетария.
4. Гиперболоид вращения. Различают
одно- и двухполостный гиперболоиды вра-
щения. Первый получается при вращении
гиперболы вокруг мнимой оси (рис. 209),
а второй — при вращении ее вокруг дей-
ствительной оси (рис. 210). Поверхность
однополостного гиперболоида может' быть
образована и вращением прямой линии.
Эта поверхность дважды линейчатая,
т. е. через каждую точку однополостного
гиперболоида проходят две и только две
его прямолинейные образующие.
Построение проекций
•
однополостного
гиперболоида вращения дано на рис. 211.
Пусть ось вращения, прямая г, расположе-
на перпендикулярно плоскости П|. При
вращении образующей АВ вокруг оси i
каждая точка прямой перемещается в про-
странстве по окружности (параллели),
плоскость которой перпендикулярна оси
89