Козлов В.Н., Куприянов В.Е., Шашихин В.Н. Управление энергетическими системами. Часть1. Теория автоматического управления
Подождите немного. Документ загружается.


4. МЕТОДЫ СИНТЕЗА ДЕТЕРМИНИРОВАННЫХ СИСТЕМ
159
ратной связью
,)(
x
uu = ,)(
tt
xuu
=
(4.12)
обеспечивающие минимум интегрального (для непрерывной сис-
темы) или суммарного (для дискретной системы) функционала
(4.11) и стабилизацию САУ. Такая задача называется
задачей
оптимальной стабилизации.
Для решения задачи используем
необходимые условия оптимальности, следующие из метода
динамического программирования Р. Беллмана.
4.4.2. Общий метод синтеза. Рассмотрим вывод функцио-
нального
уравнения Беллмана как необходимого условия оп-
тимальности
для задачи оптимальной стабилизации. Пусть
уравнение возмущенного движения объектов имеет вид (4.10)
),,(
t
u
x
f
x
=
,
а функционал качества определяется соответствующим выраже-
нием (4.11). Введем функцию Ляпунова–Беллмана аргументов t и
х(t) и рассмотрим ее значения для моментов t и (t+s):
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
Φ+=
∫
k
t
t
kk
u
ttxduxtxV )),((),,(min),(
ττω
, (4.13)
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
Φ+=++
∫
+
k
t
st
kk
u
ttxduxststxV )),((),,(min)),((
ττω
. (4.14)
Управление u должно доставлять минимум J для любого значе-
ния s > 0. Следовательно, уравнение (4.13) для любого значения s
> 0 можно переписать с учетом (4.14) в преобразованном виде
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
+++=
∫
+st
t
u
ststxVduxttxV )),((),,(min)),((
ττω
. (4.15)
160
Если V(. , .) – гладкая функция, то существует предел
x
x
V
t
V
s
ttxVststxV
s
∂
∂
+
∂
∂
=
−
+
+
→
)),(()),((
lim
0
.
Учитывая это, а также независимость V от u можно из функцио-
нального уравнения (4.15) получить преобразованное уравнение:
,
)),(()),((
),,(
min
0
***
s
s
ttxVststxV
tux
u
⎥
⎦
⎤
⎢
⎣
⎡
−
+
+
+=
ω
(4.16)
где )(
*
⋅
ω
– значение, соответствующее теореме о среднем для
интеграла в равенстве (4.15). После сокращения в выражении
(4.16) на s и перехода к пределу при s→0 получим
необходимое
условие оптимальности – уравнение Беллмана
min ( ) ( , , ) 0,
u
Vx xut
ω
⎡⎤
+
=
⎣⎦
(4.17)
обеспечивающего минимум интегрального функционала в (4.11)
для открытой области изменения
m
uR
∈
. Если область определе-
ния ограничена (
Du ∈ ), то уравнение (4.17) запишется в виде:
[
]
0),,()(inf
=
+
∈
tuxxV
Du
ω
. (4.18)
Основную роль в уравнениях (4.17) и (4.18) играет функция
V(x(t),t), которая является
функцией Ляпунова, удовлетворяющей
граничным условиям:
)),(()),((
kkkk
ttxttxV
Φ
=
при
∞
<
k
t ;
0)),(( =
kk
ttxV для ∞=
k
t .
Уравнение Беллмана для дискретных систем имеет вид:
,0)],,([min
=
+
Δ tuxV
ttt
u
t
ω
(4.19)
где
t
VΔ – приращение функции Ляпунова на траекториях (4.10).
4. МЕТОДЫ СИНТЕЗА ДЕТЕРМИНИРОВАННЫХ СИСТЕМ
161
4.4.3. Синтез оптимальных управлений для линейных
объектов.
Рассмотрим линейные уравнения динамики непрерыв-
ных и дискретных объектов, имеющие следующие формы для:
непрерывных объектов:
,)0(,
0
xxuBxAx =+=
дискретных объектов:
0
10
,.
ttt
x
Ax Bu x x
+
=
+= (4.20)
Пусть интегральные и суммарные функционалы (4.11) равны:
()
,
0
∫
∞
+= dtuRuxQxJ
TT
(
)
,
0
∑
∞
=
+=
t
t
T
tt
T
t
uRuxQxJ
(4.21)
где 0,0 >=≥=
TT
RRQQ .
Предполагается, что объект вполне управляемый. Найдем
управления с обратной связью, минимизирующие функционалы
(4.21) на траекториях систем (4.20). Представим уравнения Белл-
мана (4.17) и (4.18) для непрерывных и дискретных систем в со-
ответствующих формах, которые имеют соответствующие виды:
для непрерывных объектов для дискретных объектов
0)(min =++
∈
uRuxQxV
TT
Ru
m
min(
)0.
m
t
t
uR
TT
tttt
V
xQx uRu
∈
+
+
+=
Выберем функции Ляпунова для непрерывных и дискретных
объектов в виде соответствующих квадратичных форм:
,)( xPxxVV
T
==
,)(
t
T
ttt
xPxxVV == (4.23)
где 0>=
T
PP . Для преобразования необходимых условий (4.22)
вычислим полную производную
)(xV
и приращение
t
VΔ в силу
уравнений объекта управления
. Тогда можно получить два
(4.22)
162
класса уравнений для непрерывных и дискретных систем, полу-
ченные вычислением полной производной или приращения функ-
ций Ляпунова в силу исследуемых систем. Получим для непре-
рывных и дискретных систем соответствующие полные произ-
водные и приращения, вычисленные в силу уравнений:
для непрерывных объектов:
() 2,
TT TTT TT
xAxBu
VxPxxPx xAPxxPAxuBPx
=+
=+ = ++
для дискретных объектов:
1
11
()
2.
ttt
TT
t t t t t x Ax Bu
TT T TT TT
tttttttt
VxPx xPx
x
A P Ax x Px u B PAx u B PBu
+
++ =+
=− =
=−+ +
Далее необходимо подставить полную производную функ-
ции Ляпунова
)(xV
и приращение функции Ляпунова
t
VΔ в соот-
ветствующие (непрерывные и дискретные) уравнения Беллмана
(
как необходимые условия экстремума оптимизации).
В результате можно получить преобразованные уравнения
Беллмана как необходимые условия оптимальности для рассмат-
риваемых задач оптимизации в непрерывном и дискретном вре-
мени. Условия оптимальности, соответствующие непрерывному
и дискретному времени обладают специальной правой частью,
представляющей собой конечномерную экстремальную задачу:
.0)
2(min
,0)2(min
=+++
++−
=++++
∈
∈
t
T
tt
T
tt
T
t
t
T
T
tt
T
tt
T
T
t
Ru
TTTTTTT
Ru
uRuxQxuPBBu
xAPBuxPxxAPAx
uRuxQxxPBuxPAxxPAx
m
m
(4.24)
4. МЕТОДЫ СИНТЕЗА ДЕТЕРМИНИРОВАННЫХ СИСТЕМ
163
Вычислим минимум в левых частях полученных уравнений
Беллмана для непрерывных и дискретных систем, используя пра-
вила векторного дифференцирования линейной и квадратичной
форм вида:
()
(
)
MxxMxcxc
x
T
x
T
2, =
′
=
′
. Используя необходимое
условие экстремума, можно получить линейные алгебраические
уравнения для непрерывных и дискретных объектов:
,022 =+ uRxPB
T
0222 =++
tt
T
t
T
uRuBPBxPAB
Тогда минимизирующие элементы
*
u
и
*
t
u примут вид:
,
1*
PxBRu
T−
−=
,
1
*
t
T
t
xPABRu
−
−= (4.25)
.BPBRR
T
+=
При подставке управлений
*
u и
*
t
u
в уравнения динамики непре-
рывных и дискретных объектов (4.24) можно получить уравнения
для непрерывного (слева) и дискретного (справа) времени:
,0][
1
=+−+
−
xQPBPBRPAPAx
TTT
.0]
[
1
=+−
−−
−
t
TT
TT
t
xQPABRPBA
PAPAx
Для выполнения полученных равенств при любых векторах
x
и
t
x необходимо, чтобы выполнялись матричные уравнения:
,
1
QPBPBRPAPA
TT
−=−+
−
,
,
1
PBBRR
QPABRPBA
PAPA
Т
TT
T
+=
−=−
−−
−
(4.26)
которые называются уравнениями Риккати относительно мат-
рицы Р для непрерывных и дискретных систем. Решения матрич-
ных нелинейных алгебраических уравнений (4.26) не единствен-
164
ны. Необходимо с помощью численных методов найти решение,
которое является положительно определенной матрицей. Суще-
ствование такого решения определяется следующей теоремой.
Теорема 4.4.1. Для существования единственного поло-
жительно определенного решения алгебраического уравнения
Риккати достаточно
выполнения условий:
1). Пара матриц (A,B) должна быть невырожденной, т.е. объект
(4.20) с параметрами A, B – вполне управляемый;
2). Матрица R>0 (матрица – положительно-определенная);
3). Требуется выполнение одного из двух условий:
а). Матрица
0>Q - положительно-определенная матрица;
б). Матрица 0
≥Q и представима в виде CCQ
T
= , причем пара
),(
TT
CA - невырожденная.
Таким образом, оптимальные управления осуществляется
регуляторами пропорционального типа (4.12) (
xKu =
*
, )
tt
Kxu =
∗
параметры которых определяются уравнениями (4.26) так, что:
для непрерывных систем
,
1
PBRK
T−
−=
для дискретных систем
.
1
PABRK
T
−
−=
Приведенные результаты являются решением задачи опти-
мальной стабилизации и основой для синтеза оптимальных регу-
ляторов.
4.5. Наблюдаемость объектов и систем
Синтезированные ранее в п. 4.3 и 4.4 законы управления ос-
нованы на использовании для управления координат состояния
объекта. Известно, что координаты состояния часто не могут
быть измерены и возникает задача восстановления координат со-
стояния по измерениям выходных координат
)(
t
y
или
t
y .

4. МЕТОДЫ СИНТЕЗА ДЕТЕРМИНИРОВАННЫХ СИСТЕМ
165
Определение 4.5.1. Объекты (4.10) называются вполне на-
блюдаемыми
, если по точным измерениям векторов выхода )(
t
y
и входа
)(
t
u (или
t
y и
t
u ), а также их производных (конечных
разностей) можно определить оценки векторов состояния непре-
рывных объектов
()
x
t
или дискретных объектов
t
x
, такие, что
выполняется условия
(
)
(
)
lim
t
x
txt
→∞
=
для непрерывного объекта и
lim
tt
t
x
x
→∞
=
для дискретного объекта. Для оцениваниякоординат
состояния по выходным координатам необходимо выполнение
критериев наблюдаемости.
Теорема 4.5.1 (критерий наблюдаемости для линейных
систем). Для того чтобы объекты
,, uD
x
CyuB
x
A
x
+=+=
,
,
1
ttt
ttt
uDxCy
uBxAx
+=
+
=
+
(4.27)
были вполне наблюдаемыми, необходимо и достаточно выполне-
ние рангового критерия
nCACACACrank
TnTTTTTT
=
−
])(||)(||[
12
,
)(dim
x
n
=
. (4.28)
Рассмотрим доказательство достаточности (4.28) для непре-
рывных объектов. Поскольку
)(
t
u измеряется и параметры моде-
ли (4.27) известны, можно ограничиться вариантом D=0. Про-
дифференцируем вектор выхода (n–1) раз. Тогда:
,
,
,
2
uCBCABuxCAuCBxCAy
d
t
d
y
CBuCAxxCy
Cxy
BuAxx
BuAxx
′
++=
′
+
′
=
′
=
′′
+=
′
=
′
=
+=
′
+=
′
166
∑
−
=
−−−−
+=
′′
+
′
++=
′′
=
′′′
2
0
)2(1)1(
23
.
,
n
l
lnlnn
BuCAxCAy
uCBuCABBuCAxCAy
dt
d
y
Представим подчеркнутые слагаемые системы через остальные
переменные рассматриваемой системы. Тогда можно получить
следующие соотношения:
()
232
2
1
12
0
,,
,,
.
n
n
nlnl
l
Cx
y
CAx
y
CBu
CA x
y
CABu CBu CA x
y
CA Bu CABu CBu
CA x y CA Bu
−
−
−−−
=
′
==−
′′ ′ ′′′ ′ ′′
=− − =− − −
=−
∑
………
(4.29)
Система линейных алгебраических уравнений (4.29) разре-
шима относительно координат вектора состояний x, если ранг
матрицы системы равен n:
nCACACACrang
n
=
−
]...[
12
.
Поскольку при транспонировании ранг матриц не изменяется, то
доказана достаточность условия полной наблюдаемости (4.28).
Определение 4.5.2. Устройства, используемые для вычис-
ления координат состояния по измерениям выходных координат,
называются
наблюдателями состояния.
Известны разомкнутые и замкнутые наблюдатели, причем
структурная схема таких устройств, предложенная Люенберге-
ром, описывается уравнениями
.)
~
(
~~
, xCxCLuBxAxuBxAx
−
+
+
=
+=
(4.30)
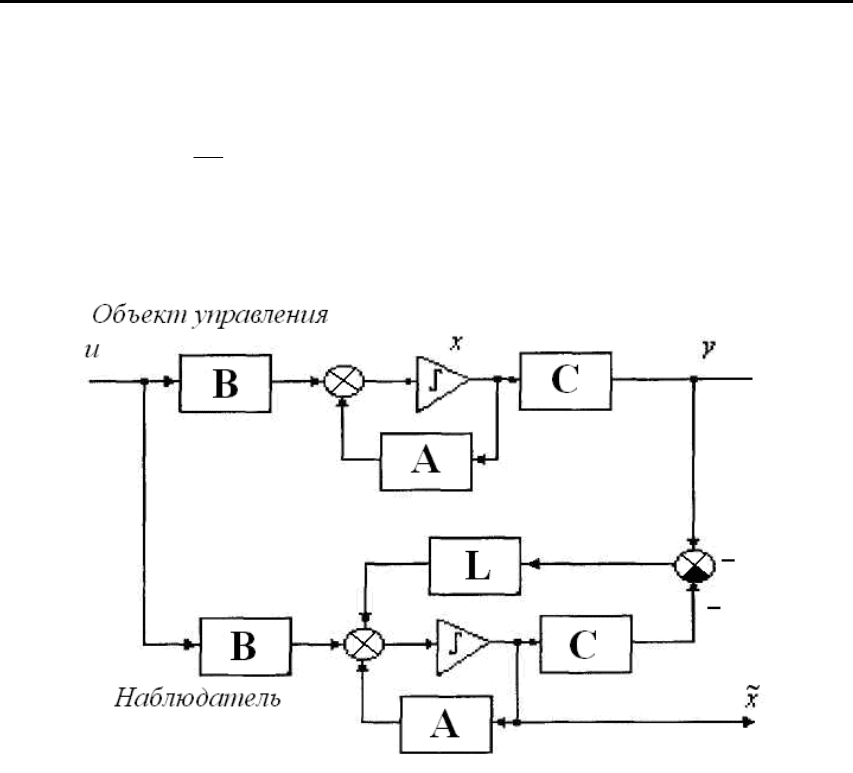
4. МЕТОДЫ СИНТЕЗА ДЕТЕРМИНИРОВАННЫХ СИСТЕМ
16
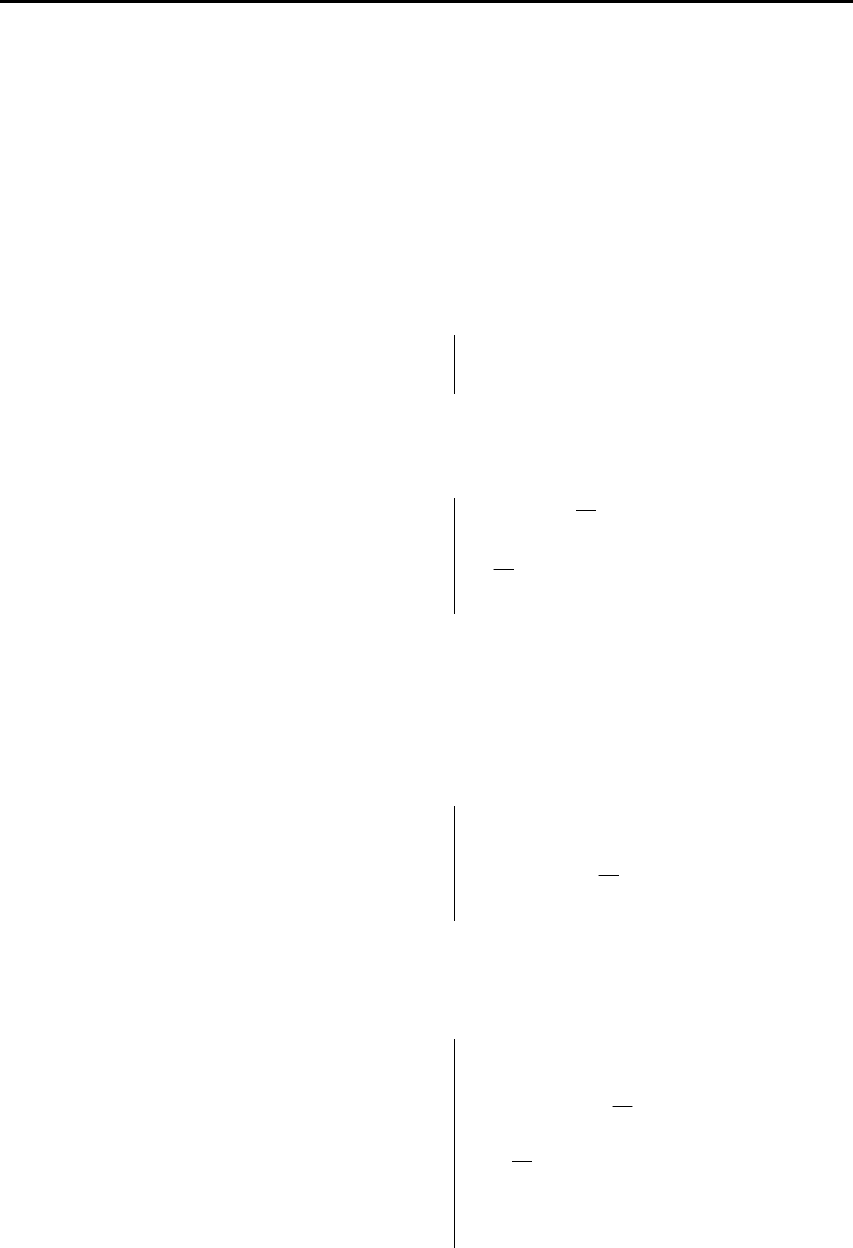
7
Структурная схема наблюдателя Люенбергера, соответствующая
уравнениям (4.30), представлена на рис. 4.2. Изменение ошибки
наблюдателя
)(
~
)()( txtxte
d
t
d
−=
определяют на основе использо-
вания соотношений (4.30), что приводит к уравнению ошибки:
Рис. 4.2. К структуре наблюдателя Люенбергера
.)( eL
C
A
e −=
При синтезе систем с наблюдателями управление
строится в функции оценки
x
K
u
~
=
. Тогда уравнения объекта и
наблюдателя определяются уравнениями:
,
~~
)(
~
,
~
xBKxLCxLCAxxBKxAx ++−=+=
Введение ошибки преобразует уравнения наблюдателя к виду:
.)(,)( eLCAeeBKxBKAxx −=−+=
(4.31)
Если ввести вектор
[,]
T
zxe=
, то системе (4.31) соответствует
однородное дифференциальное уравнение с блочной матрицей

168
,.
0
cc
ABK BK
zAz A
A
LC
+−
⎡
⎤
==
⎢
⎥
−
⎣
⎦
При этом матрица A
c
замкнутой системы имеет такие же собст-
венные значения, что и стоящие на главной диагонали блоков
BK
A
+ и L
C
A
− . Таким образом доказано утверждение.
Утверждение 4.5.1. Если система (4.27) управляемая и на-
блюдаемая, то можно выбрать матрицы K и L так, что обратная
связь
x
K
u
~
= с наблюдателем (4.30) стабилизирует систему.
Таким образом, для наблюдаемых объектов синтезируются
наблюдатели для оптимальной стабилизации и других задач.
4.6. Синтез стабилизирующих регуляторов
на основе мо
делей «вход–выход»
При проектировании определенного класса систем управле-
ния стремятся использовать наиболее простую зависимость
управления от выходных переменных. Желательно строить
управление в функции выхода в наиболее простой форме
y
K
u = ,
однако далеко не всегда это приводит к успеху. Рассмотрим воз-
можность построения устойчивых систем управления с заданны-
ми полюсами передаточной функции при управлении по выходу.
4.6.1. Постановки задач. Пусть заданы математические мо-
дели вполне управляемых непрерывных и дискретных объектов в
виде соотношений «вход–выход», которые представляются урав-
нениями:
для непрерывного времени
,)()()()(
t
upb
t
ypa
=
для дискретного времени
,)()(
tt
ubya
ξ
ξ
=
(4.32)
где
1
,
+
ΔΔ
==
tt
yy
d
t
d
p
ξ
- операторы дифференцирования и сдви-