Хермен Г. Восстановление изображений по проекциям: Основы реконструктивной томографии
Подождите немного. Документ загружается.

5
Получение данных
и реконструкция изображения фантома головы
в различных условиях
В этой главе даны примеры моделирования погрешностей разного
происхождения и различных схем получения данных, используемых в
реконструктивной томографии. Для каждой из них показаны результаты
реконструкций по данным моделирования и путем сравнения с тест-
фантомами.
5.1.
МЕТОДЫ СРАВНЕНИЯ ИЗОБРАЖЕНИЙ
Реконструкция — это дискретизированное изображение. В случае если
это реконструкция, полученная по модельным данным от тест-фантома, то
о качестве этой реконструкции судят путем сравнения ее с
дискретиэированными данными самого фантома. При этом, естественно,
кадр изображения и сетка должны иметь одни и те же размеры как для
реконструкции, так и для дискретизации фантома. Этот раздел
посвящается обсуждению вопроса о том, как отображают и измеряют
различие между реконструкцией и фантомом.
Визуальная оценка является, конечно, наиболее прямым методом. Для
этого отображают реконструкционное изображение и изображение
фантома и смотрят, все ли интересующие нас характеристики фантома
воспроизведены на реконструкции и нет ли ложных деталей, возникших в
процессе реконструкции. Недостаток подобной качественной оценки в ее
субъективности, так как специалисты довольно часто расходятся во мнении
о том, какое из двух изображений точнее воспроизводит третье.
Более точный метод оценки изображений состоит в следующем.
Выбираем столбец элизов, проходящий через наиболее существенные
детали в оригинале. Например, в рассмотренном нами цифровом фантоме
головы (разд. 4.3) 63-й столбец из 115 столбцов проходит через желудочки,
обе опухоли и гематому. На рис. 5.1 этот столбец изображен черной
вертикальной линией. Один из методов оценки качества реконструкции
заключается в сравнении 115 значений плотности в элизах этого столбца в
оригинале и реконструкции. Такое сравнение сделано для всех
реконструкций фантома головы, приведенных в данной книге.
Лучше всего иметь один параметр, который является мерой близости
реконструкции и оригинала. Здесь следует предупредить читателя, что не
только один параметр, но даже и набор из нескольких параметров не
могут описать всех характеристик отличия двух изображений.
Последовательность приближения реконструкций к оригиналу, выбранная
на основе измерения только одного параметра, может оказаться ложной.
ПОЛУЧЕНИЕ ДАННЫХ
И
РЕКОНСТРУКЦИЯ ИЗОБРАЖЕНИЯ
79
Рис. 5.1. Фантом головы.
63-й столбец из массива 115 столбцов отмечен вертикальной прямой. Кривые зависимости плот-
ности вдоль этого столбца приводятся для всех реконструкций, рассмотренных
в
дайной книге.
В данной книге приведены три меры различия между изображениями.
Чтобы определить эти меры, обозначим через
t
u v
и г
и
плотности
и-го
элиза в и-й строке матрицы тест-фантома и реконструкции соответственно,
а
Г —
среднее значение плотности
в
дискретизации тест-фантома.
Мы
предполагаем, что обе эти матрицы изображения имеют размер
f х f,
причем
[ f/2]
равно наибольшему целому числу,
но не
более
(
/2. Меры
различий, определяемые выражениями (5.1) — (5.5), часто используют
в
литературе
по
томографии:
V
и
l v I / и \ i 1 /
f
f I t (
'-=1
I
\Kv-r
u
,
v
\
l
.'£
x
KtU
и
1 I I U 1 I 1
e= макс \T
Lj
-R
lmJ
l
l
<i< \Г2\
1 7-1Л21
где
'i.j
=
4\hi.2j + hi+\ 2) + hi.2j^ 1 + ^2i+1.2j-+ 1)'
**i,
j ~ A\
r
2i. 2j +
r
2i ♦ 1. 2j +
r
2i. 2j
*
1 +
r
2i
-»
1. 2j
+ 1
)
Приведенные выше
три
меры различия выражают разные аспекты
качества изображения. Первая
из них,
rf-мера, является нормированной
среднеквадратичной мерой различия. Большое различие значений
в
небольшой области ведет
к
высокому значению
d.
Отматим, что
d = 1
(5.1)
(5.2)
(5.3)
(5.4)
(5.5)
80
ГЛАВА 5
тогда, когда реконструкции представляют собой правильное
воспроизведение изображения с равномерно распределенной средней
плотностью. Вторая мера, г-мера, является нормированной абсолютной
средней мерой различия. В противоположность </-мере г-мера фиксирует
наличие большого числа малых ошибок, нежели малого числа больших
ошибок. Отметим, что г = 1 тогда, когда реконструкции имеют
плотность, равную нулю по всем элизам. Третья мера, е-мера,
соответствует различию в наихудшем случае. Ее значение равно
наибольшей разнице в плотности между [£ /2] х [ /72]-матрицами тест-
фантома и реконструкции. При вычислении е-меры мы используем более
грубую дискретизацию, чем та, которая была использована для
реконструкции, так как размер наименьших деталей в рассматриваемом
фантоме равен нескольким элизам, и на практике мы обычно пользуемся
усредненными значениями плотности в этих элизах для оценивания
относительного линейного ослабления ткани или опухоли, которые нас
интересуют. «-Мера обеспечивает нас гарантированной надежностью такой
оценки. Все три меры будут приведены для всех реконструкций в данной
книге.
Реальной мерой достоверной процедуры реконструкции являются ее
характеристики, полученные в практике медицинской диагностики. К
сожалению, эту меру трудно определить количественно, и поэтому в
качестве одного из подходов используют рабочие характеристики
приемника, о которых в данной книге ничего не говорится.
5.2.
РЕКОНСТРУКЦИЯ ПО ИДЕАЛЬНЫМ ДАННЫМ
Опишем теперь геометрию сбора данных, которая используется по всей
книге, кроме тех случаев, когда для получения большей наглядности
требуется иная геометрия сбора данных.
Основная геометрия используется в третьей схеме сканирования,
рассмотренной нами в разд. 3.4, а именно во вращающемся сканере с
веерным пучком, представленным на рис. 3.3,е.
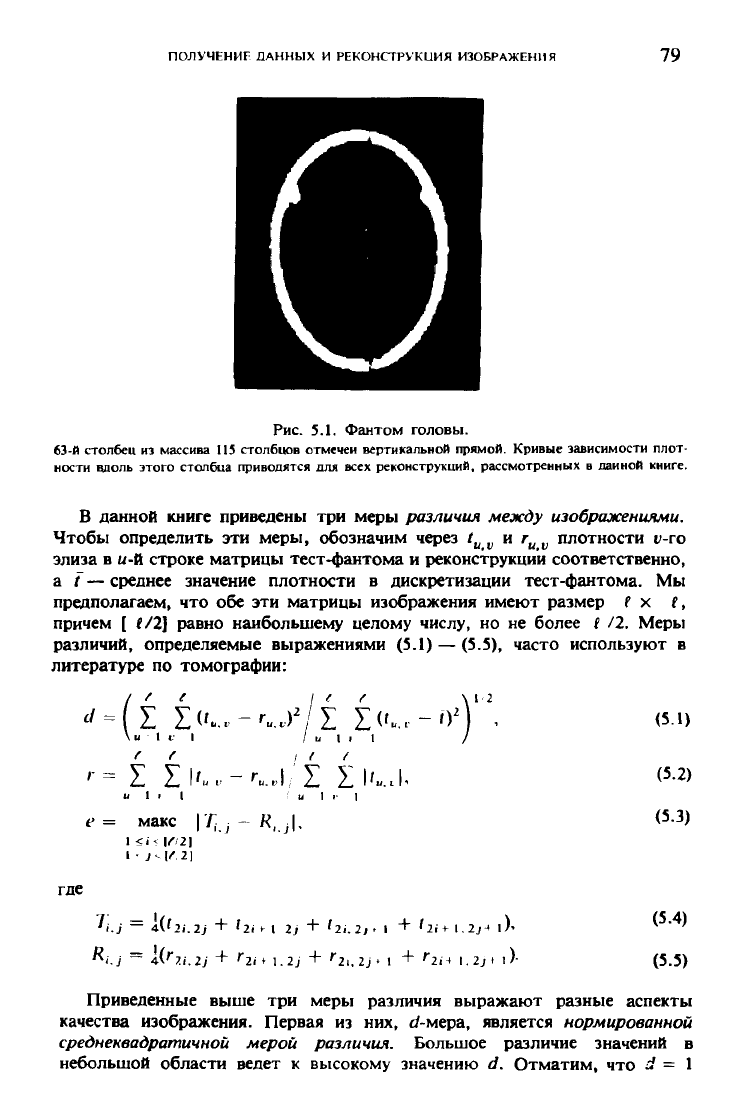
Принцип действия этой схемы сЬора данных приведен на рис. S.2.
Источник и удлиненная полоска с детекторами находятся по обе стороны
от объекта, реконструкцию которого необходимо получить, и вращаются
согласованно вокруг общего центра, обозначенного через О. Сбор данных
(рабочие измерения) производят за М шагов при различных положениях
источника и детекторов относительно объекта. В промежутке между двумя
шагами источник и удлиненная полоска с детекторами поворачиваются на
небольшой угол и остаются неподвижными во время измерений. Число
шагов М различных положений источника во время М тактов сбора
данных на рис. 5.2 обозначено точками 5
0
, . . ., S
M
_,. При моделировании
этой геометрии предполагаем, что источник рентгеновского излучения
является точечным. Удлиненная полоска детекторов несет 2N + 1
детекторов, расположенных равномерно по дуге, центр которой находится
в месте расположения источника. Прямая от источника до центра
ПОЛУЧЕНИЕ ДАННЫХ И РЕКОНСТРУКЦИЯ ИЗОБРАЖЕНИЯ
81
Положения
источника „ s
St *о Л
Сканирование
по углу
Рис. 5.2. Схема стандартного метода сбора данных для веерного пучка.
Методы сбора данных, которые использовались для реконструкций, приведенных на рис. 1.10 и
1.14, являются частными случаями данного метода.
вращения проходит через центр вращения детектора, находящегося в
центре полоски. В данном разделе предполагаем, что все используемые
детекторы являются точечными, а случай конечных размеров детекторов
рассмотрен в разд. 5.5.
В качестве объекта восстановления рассматривается изображение, кадр
которого находится внутри круга, ограниченного штриховой линией на
рис. 5.2. Предполагаем, что начало системы координат, которая
используется для описания этого изображения, совпадает с центром 0
вращения аппаратуры.
В этом разделе мы предполагаем, что у нас имеются «идеальные»
данные, т.е. мы точно знаем интегралы изображения, которое необходимо
реконструировать, вдоль M(2N + 1) прямых, соединяющих источник
излучения с 2N + 1 детектором для каждого из М положений источника.
Алгоритм, который применяется для реконструкции по таким данным,
называют сверточным алгоритмом для веерного пучка. Смысл таких
алгоритмов рассматривается в разд. 10.1. Чтобы четко уяснить влияние
разных аспектов, связанных с фазой сбора данных, используем один и тот
же алгоритм реконструкции во всех случаях, когда он применим.
(Единственным исключением будет случай, когда сбор данных ведут вдоль
параллельных прямых.) Конкретные параметры, которые применяются в
данном алгоритме, приводится в разд. 10.6 после разъяснения сверточного
82
ГЛАВА 5
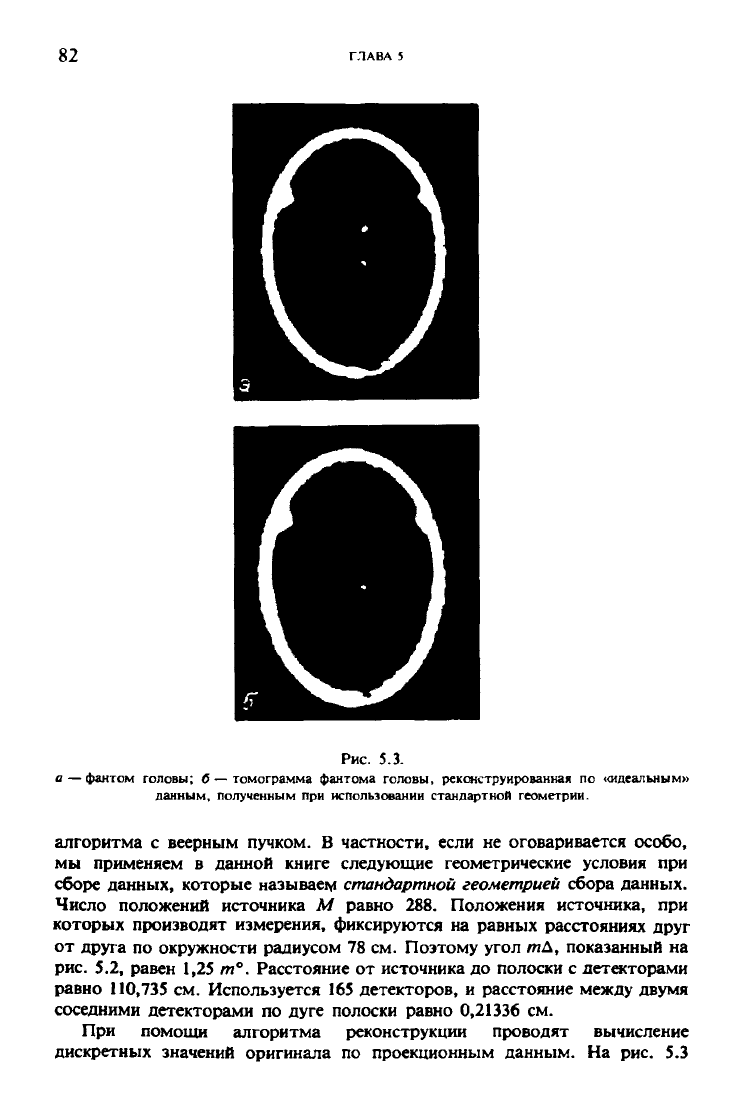
Рис. 5.3.
а — фантом головы; б— томограмма фантома головы, реконструированная по «идеальным»
данным, полученным при использовании стандартной геометрии.
алгоритма с веерным пучком. В частности, если не оговаривается особо,
мы применяем в данной книге следующие геометрические условия при
сборе данных, которые называем стандартной геометрией сбора данных.
Число положений источника М равно 288. Положения источника, при
которых производят измерения, фиксируются на равных расстояниях друг
от друга по окружности радиусом 78 см. Поэтому угол тА, показанный на
рис. 5.2, равен 1,25 т°. Расстояние от источника до полоски с детекторами
равно 110,735 см. Используется 165 детекторов, и расстояние между двумя
соседними детекторами по дуге полоски равно 0,21336 см.
При помощи алгоритма реконструкции проводят вычисление
дискретных значений оригинала по проекционным данным. На рис. 5.3
ПОЛУЧЕНИЕ ДАННЫХ И РЕКОНСТРУКЦИЯ ИЗОБРАЖЕНИЯ
83
0,24
0.23
| 0,22 \\
1
1 0,21
0.20
0,<9
—Щ
30
45 60 75
Координата
90 105 120
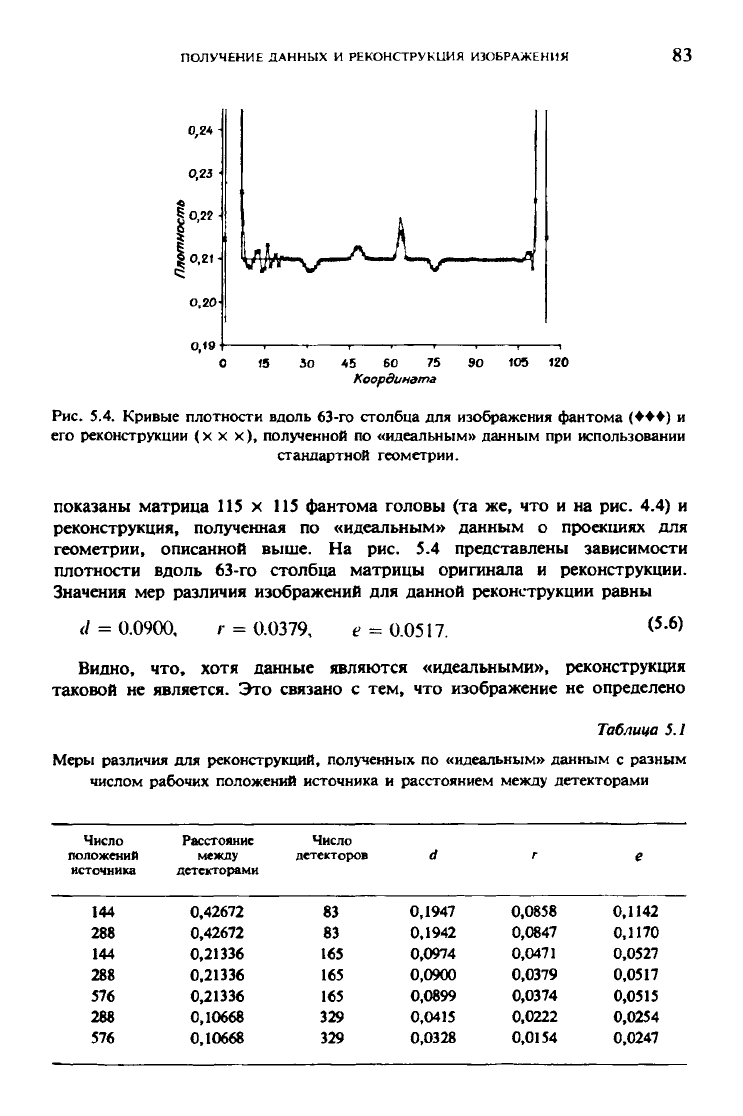
Рис. 5.4. Кривые плотности вдоль 63-го столбца для изображения фантома (♦♦♦) и
его реконструкции (х х х), полученной по «идеальным» данным при использовании
стандартной геометрии.
показаны матрица 115 х 115 фантома головы (та же, что и на рис. 4.4) и
реконструкция, полученная по «идеальным» данным о проекциях для
геометрии, описанной выше. На рис. 5.4 представлены зависимости
плотности вдоль 63-го столбца матрицы оригинала и реконструкции.
Значения мер различия изображений для данной реконструкции равны
d = 0.0900,
г = 0.0379,
е = 0.0517.
(5.6)
Видно, что, хотя данные являются «идеальными», реконструкция
таковой не является. Это связано с тем, что изображение не определено
Таблица 5.1
Меры различия для реконструкций, полученных по «идеальным» данным с разным
числом рабочих положений источника и расстоянием между детекторами
Число
Расстояние Число
положений между детекторов d г е
источника детекторами
144 0,42672
83
0,1947
0,0858 0,1142
288
0,42672
83
0,1942
0,0847
0.1170
144 0,21336
165
0,0974
0,0471
0,0527
288 0.21336 165
0,0900
0,0379
0.0517
576 0,21336 165
0,0899
0,0374
0,0515
288 0,10668 329
0,0415
0.0222
0,0254
576 0,10668 329
0,0328 0,0154
0,0247
0,24
0,23
I
| 0,22
| 0,21
0,20
Рис. 5.5.
45 60 75 90 105 120
Координата
Рис. 5.6.
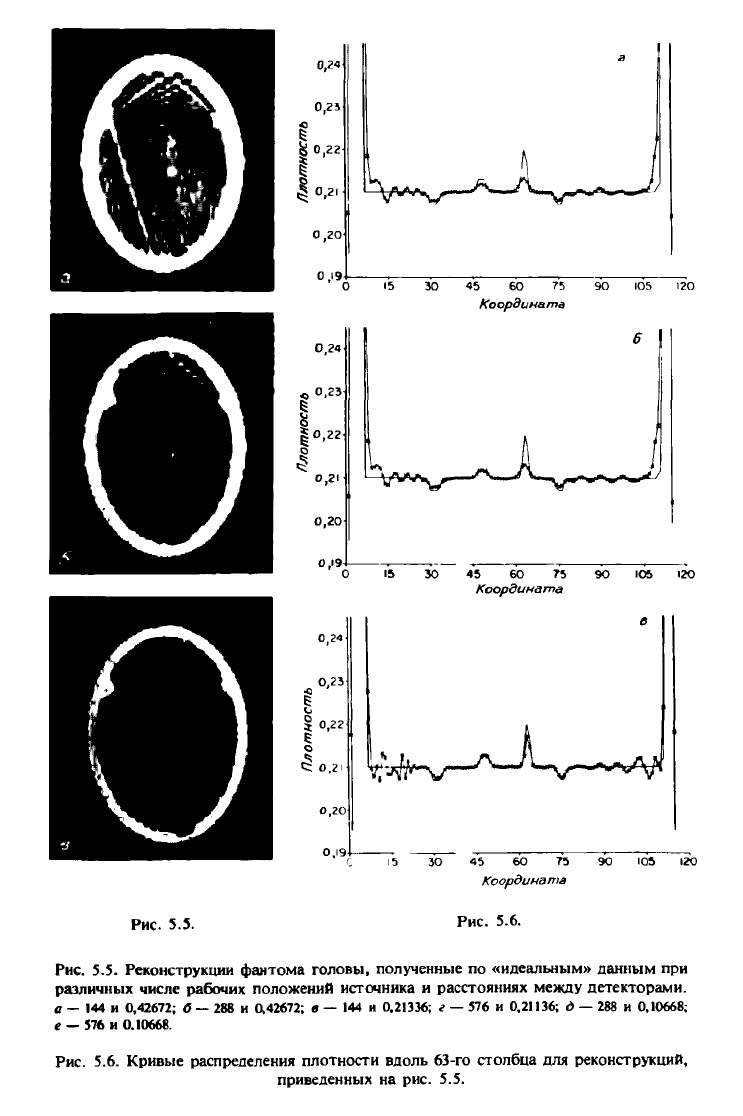
Рис. 5.5. Реконструкции фантома головы, полученные по «идеальным» данным при
различных числе рабочих положений источника и расстояниях между детекторами.
a — 144 и 0,42672; б — 288 и 0,42672; в — 144 и 0.21336; г — 576 и 0,21136; д — 288 и 0,10668;
е — 576 и 0.10668.
Рис. 5.6. Кривые распределения плотности вдоль 63-го столбца для реконструкций,
приведенных на рис. 5.5.
0.2Ъ[
-о
°о,гг
^ 0,21#
0,20
0,19
0,24
0 0,22
£ 0,21
15 30 45 60 75 90 Ю5 120
Координата
45 60 75 90
Координата
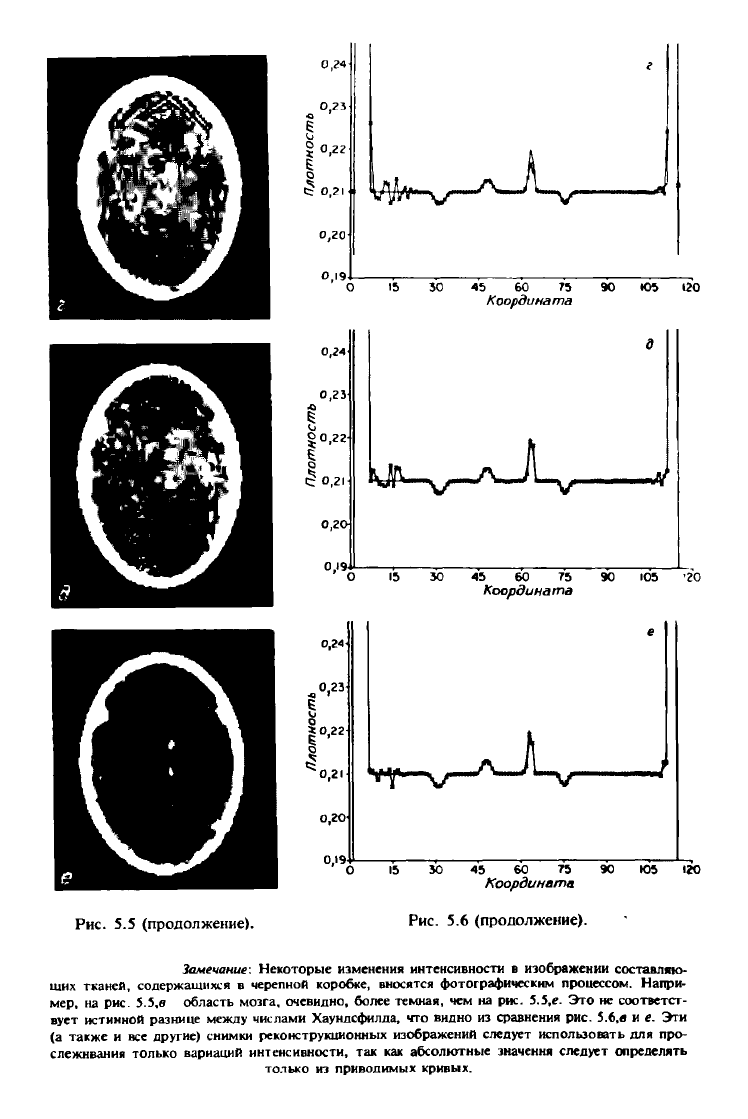
Рис. 5.5 (продолжение).
Рис. 5.6 (продолжение).
Замечание: Некоторые изменения интенсивности в изображении составляю-
щих тканей, содержащихся в черепной коробке, вносятся фотографическим процессом. Напри-
мер,
на рис. 5.5,в область мозга, очевидно, более темная, чем на рис. 5.5,е\ Это не соответст-
вует истинной разнице между числами Хаундсфилда, что видно из сравнения рис. 5.6,в и е. Эти
(а также и все другие) снимки реконструкиионных изображений следует использовать для про-
слеживания только вариаций интенсивности, так как абсолютные значения следует определять
только из приводимых кривых.
86
ГЛАВА 5
однозначно интегралами вдоль конечного числа прямых (разд. 16.4). Самое
большое, что можно выполнить при помощи алгоритма реконструкции,
это оценить изображение по его проекционным данным.
Чтобы показать, что число линейных интегралов влияет на качество
реконструкции, проведем следующие шесть опытов с «идеальными»
данными: три с меньшим числом, а три с большим числом линейных
интегралов, чем в исходной стандартной геометрии. В табл. 5.1 приведены
данные, которые показывают, как влияет число положений источника, при
которых проводятся измерения, и расстояние 'Между детекторами на меру
различия изображений. (Расстояние по дуге между первым и последним
детекторами во всех случаях одно и то же.) Соответствующие
реконструкционные изображения приведены на рис. 5.5, а кривые
распределения плотности вдоль 63-го столбца — на рис. 5.6.
5.3.
ВЛИЯНИЕ СТАТИСТИКИ ФОТОНОВ
РЕНТГЕНОВСКОГО ИЗЛУЧЕНИЯ
Проекционные данные для реконструкций в этом разделе были
получены при помощи алгоритмов, которые разобраны в разд. 4.4 в
предположении точечных источника, детектора, а также
монохроматического рентгеновского излучения и отсутствия рассеяния.
Монохроматическая лучевая сумма для любой пары источник — детектор
рассчитывается следующим образом:
т
= -In
0/
-\ (5.7)
где А
0
, А
п
С
0
и С
Т
— выборки случайной переменной, распределенной по
закону Пуассона с математическими ожиданиями Х
л
, X, Х
с
, Х
с
соответствен-
но.
Здесь \
Q
связано с X соотношением
A
a
= Aexp| - £'jdX (5.8)
где d: — плотность у-го элементарного объекта при заданной энергии
монохроматического пучка. Данное выражение является прямым
следствием (4.6) для случая, когда число энергетических уровней / = 1.
Нас интересует влияние выбора величин X и Х
с
на качество
реконструкций, а также влияние схемы сканирования, когда имеются
погрешности в калибровочных измерениях (разд. 3.4 и 4.4). Кроме третьей
схемы сканирования, рассмотрим стандартную геометрию для четвертой
схемы сканирования. Всего выполнены четыре эксперимента по
исследованию влияния статистики фотонов.
В эксперименте, который является вполне реальным с точки зрения
возможностей современных сканирующих устройств, были использованы
значения X = 10
6
и Х
с
= 288-10
6
. Это значит, что при проведении рабочих
ПОЛУЧЕНИЕ ДАННЫХ И РЕКОНСТРУКЦИЯ ИЗОБРАЖЕНИЯ
87
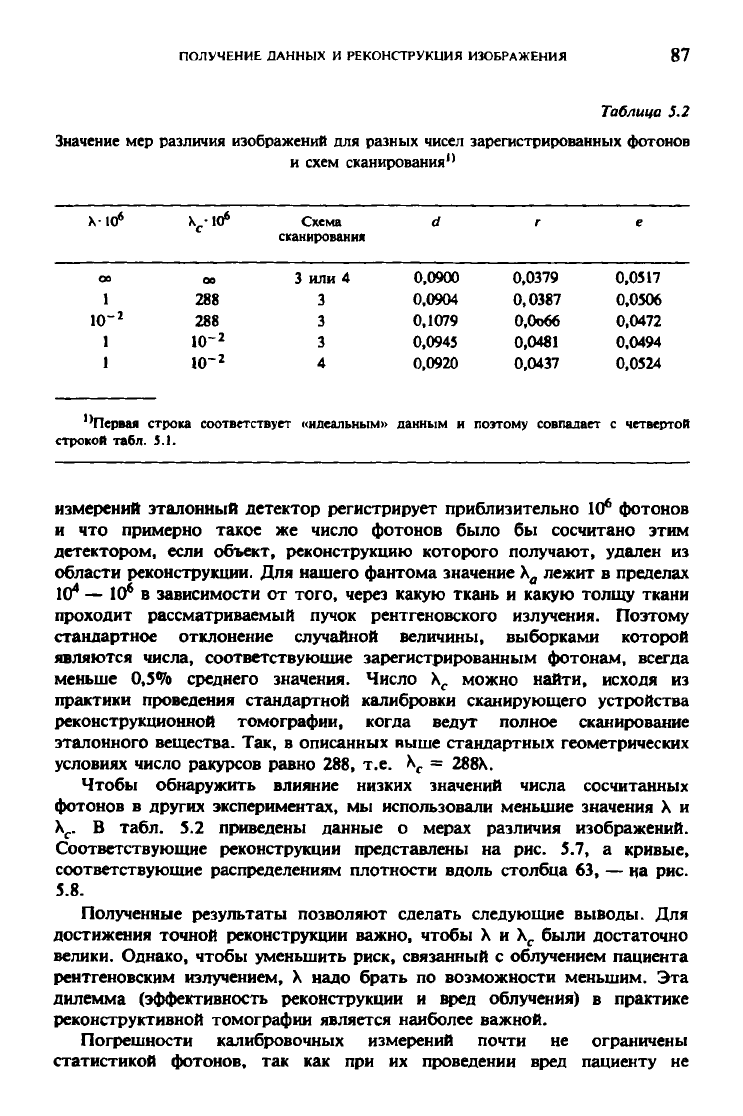
Таблица
5.2
Значение мер различия изображений для разных чисел зарегистрированных фотонов
и схем сканирования
п
Х-10
6
х
с
-ю
6
Схема
сканирования
d
г е
оо
00
3 или 4
0,0900
0,0379 0,0517
1
288
3
0,0904
0,0387
0,0506
кг
2
288
3
0,1079
О.Ообб
0,0472
1
ю-
2
3
0,0945
0,0481
0,0494
1
ю-
2
4
0,0920
0.0437 0,0524
1
Первая
строка соответствует «идеальным» данным и поэтому совпадает
с четвертой
строкой табл.
5.1.
измерений эталонный детектор регистрирует приблизительно 10
6
фотонов
и что примерно такое же число фотонов было бы сосчитано этим
детектором, если объект, реконструкцию которого получают, удален из
области реконструкции. Для нашего фантома значение Х
в
лежит в пределах
10
4
— 10
6
в зависимости от того, через какую ткань и какую толщу ткани
проходит рассматриваемый пучок рентгеновского излучения. Поэтому
стандартное отклонение случайной величины, выборками которой
являются числа, соответствующие зарегистрированным фотонам, всегда
меньше 0,5% среднего значения. Число Х
с
можно найти, исходя из
практики проведения стандартной калибровки сканирующего устройства
реконструкционной томографии, когда ведут полное сканирование
эталонного вещества. Так, в описанных выше стандартных геометрических
условиях число ракурсов равно 288, т.е. Х
с
= 288Х.
Чтобы обнаружить влияние низких значений числа сосчитанных
фотонов в других экспериментах, мы использовали меньшие значения X и
Х
с
. В табл. 5.2 приведены данные о мерах различия изображений.
Соответствующие реконструкции представлены на рис. 5.7, а кривые,
соответствующие распределениям плотности вдоль столбца 63, — на рис.
5.8.
Полученные результаты позволяют сделать следующие выводы. Для
достижения точной реконструкции важно, чтобы X и Х
с
были достаточно
велики. Однако, чтобы уменьшить риск, связанный с облучением пациента
рентгеновским излучением, X надо брать по возможности меньшим. Эта
дилемма (эффективность реконструкции и вред облучения) в практике
реконструктивной томографии является наиболее важной.
Погрешности калибровочных измерений почти не ограничены
статистикой фотонов, так как при их проведении вред пациенту не