Грушинский Н.П. Основы гравиметрии
Подождите немного. Документ загружается.

морских пунктах непрерывными наблюдениями во время
хода судна, т. е., как принято говорить, получать непре
рывные гравиметрические профили. Появилась возможность
автоматизированной обработки данных, без которой нельзя
было бы справиться с возникшим информационным взры
вом. Непрерывность записи данных измерения Ag, а также
навигационных и гидрологических данных, в корне изме
нила прежнюю методику гравиметрических измерений на
море и их последующую обработку. Автоматизированный
гравиметр стал рассматриваться как сложная динамиче
ская система, часто с глубокой обратной связью. С при
влечением нетрадиционного для гравиметрии математи
ческого аппарата случайных функций и методов теории
автоматического регулирования была разработана и про
должает совершенствоваться теория такого гравиметра.
Изучение статистических закономерностей гравитационных
полей различных регионов позволило решить некоторые
задачи оптимальной обработки экспериментальных данных
морской гравиметрии. Подробности см. в книге: Панте
леев В. Л. Основы морской гравиметрии.— М.: Недра,
§ 3. Влияние возмущающих ускорений и наклонов
при установке гравиметра на гироплатформе
Для измерения силы тяжести в условиях действия воз
мущающих ускорений и наклонов прежде всего надо их
уменьшить. Это достигается тем, что гравиметр устанав
ливается на гиростабилизированной платформе, а в не
которых случаях (гравиметр Лакоста и Ромберга) в под
весе Кардана.
Если прибор установлен на идеальной гироплатформе,
то ось чувствительности совпадает с истинной вертикалью.
Практически это не так. Пусть угол а — погрешность ус
тановки платформы в горизонтальной плоскости. В этом
случае проекция силы Q' на ось чувствительности предста-
о dP'X
вится как сумма проекции горизонтального ускорения ^
и ускорения силы тяжести на эту ось (рис. 92):
1983.
OD = OE + OF = OF + FD,
т. е.
W3y //2 у
Q' = geos а + ш sin a « g + a-
dt2
■ga*
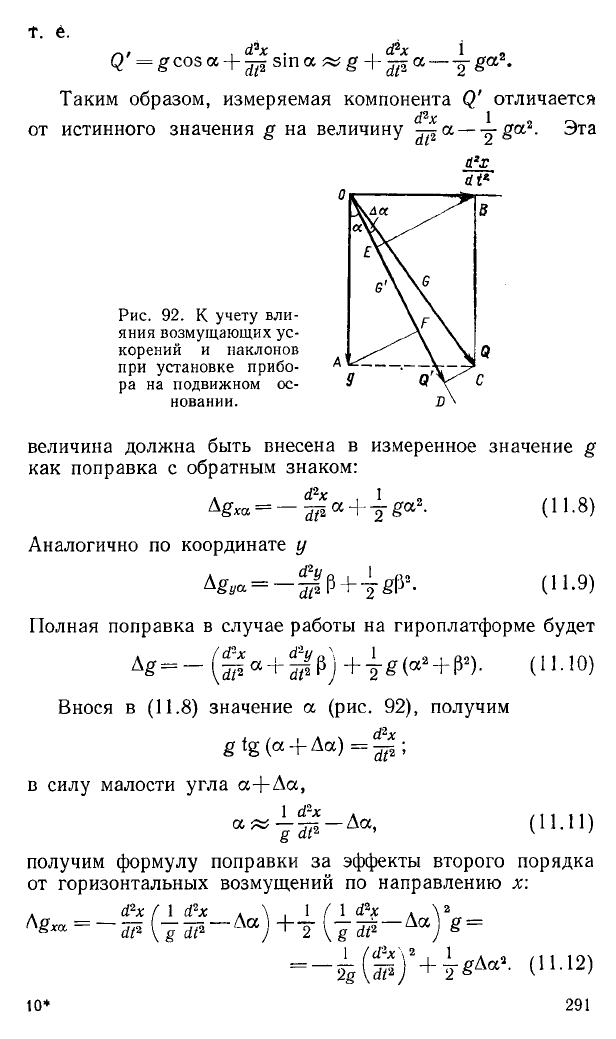
Таким образом, измеряемая компонента Q' отличается
d^x 1
от истинного значения g на величину ^ а — j ja 1. Эта
Рис. 92. К учету вли
яния возмущающих ус
корений и наклонов
при установке прибо
ра на подвижном ос
новании.
йгх
it*-
величина должна быть внесена в измеренное значение g
как поправка с обратным знаком:
Аналогично по координате у
Ag,a = - | f P + 4 ^ 2-
(11.8)
(11.9)
Полная поправка в случае работы на гироплатформе будет
' d2x , d2y р \ , 1
A g — — +"2"§(a2 + P2)- (11.10)
Внося в (11.8) значение а (рис. 92), получим
d2x
Ж2
g tg (а + Да) = % ;
в силу малости угла a+ A a ,
а
1 d2x .
— zm — Aa .
g dt2 ’
( 11.11)
получим формулу поправки за эффекты второго порядка
от горизонтальных возмущений по направлению х:
= - h & Y + ? eAa’- <11Л2)
Аналогично можно написать формулу для вычисления по
правки по направлению у.
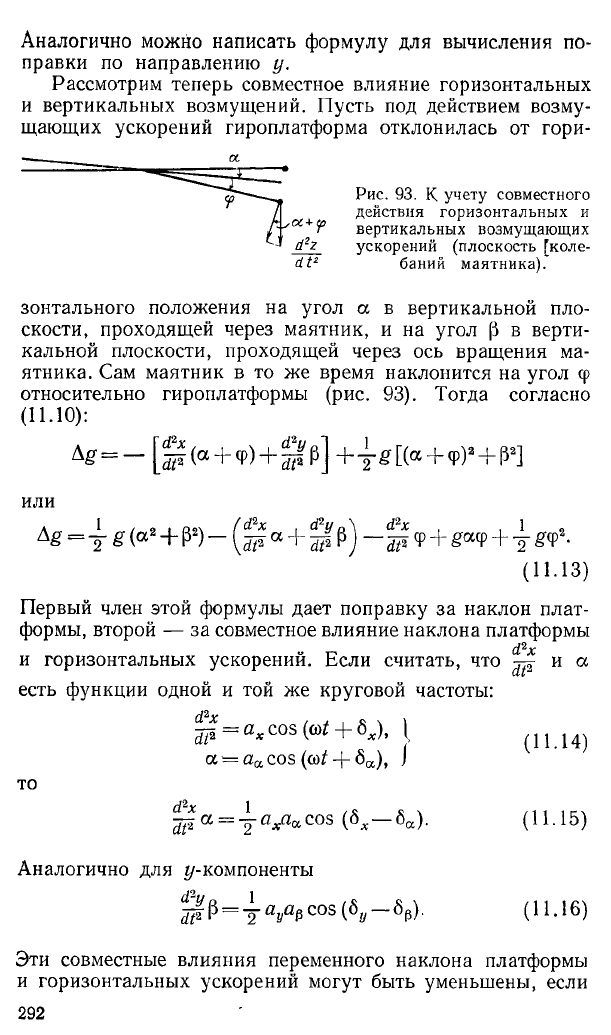
Рассмотрим теперь совместное влияние горизонтальных
и вертикальных возмущений. Пусть под действием возму
щающих ускорений гироплатформа отклонилась от гори
зонтального положения на угол а в вертикальной пло
скости, проходящей через маятник, и на угол (5 в верти
кальной плоскости, проходящей через ось вращения ма
ятника. Сам маятник в то же время наклонится на угол ср
относительно гироплатформы (рис. 93). Тогда согласно
Первый член этой формулы дает поправку за наклон плат
формы, второй — за совместное влияние наклона платформы
d2x
и горизонтальных ускорений. Если считать, что ^ и а
есть функции одной и той же круговой частоты:
Эти совместные влияния переменного наклона платформы
и горизонтальных ускорений могут быть уменьшены, если
а
-- й2г
dt2
о с + <р
Рис. 93. К учету совместного
действия горизонтальных и
вертикальных возмущающих
ускорений (плоскость [коле
баний маятника).
(11.10):
а£ = — [а ?(а + (р)+5** р] + т £ 1 Х а + (р)а+ Р 2]
или
A£ = Y £ ( a2 + P2) - ( ^ a + S p ) - $ Ф + ^Ф + т^Ф 2-
(11.13)
(11.14)
(11.15)
Аналогично для у-компоненты
J f l ^ y a ^ c o s (6B — fip).
(11.16)
уменьшить соответствующие косинусы углов, т. е. сделать
близкими к п/2 разности
d2x
Третий член формулы (11.13) учитывает совмест
ное влияние горизонтальных и вертикальных ускорений,
получившее название кросс-каплинг-эффекта.
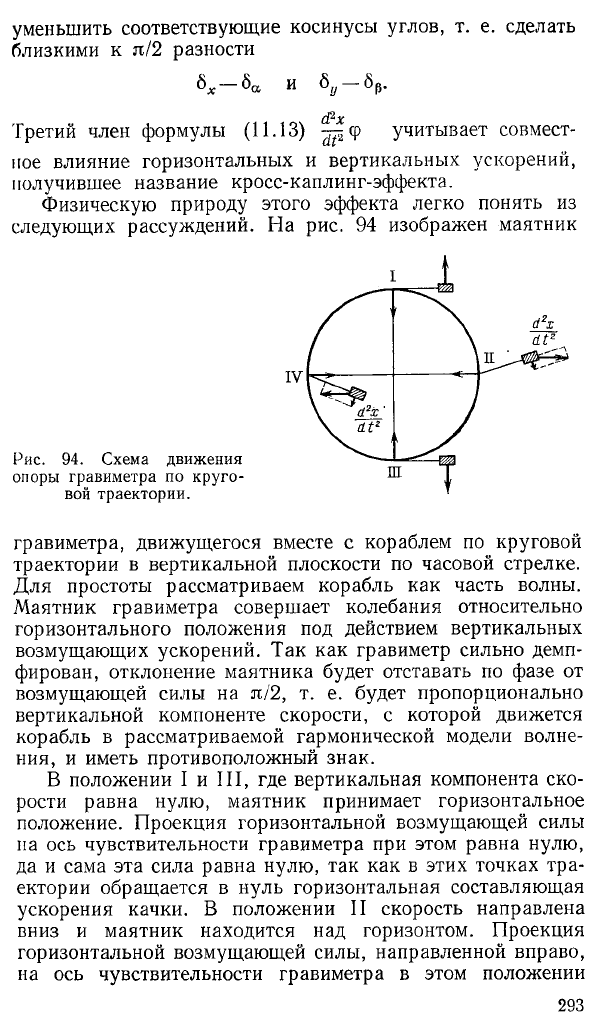
Физическую природу этого эффекта легко понять из
следующих рассуждений. На рис. 94 изображен маятник
Рис. 94. Схема движения
опоры гравиметра по круго
вой траектории.
гравиметра, движущегося вместе с кораблем по круговой
траектории в вертикальной плоскости по часовой стрелке.
Для простоты рассматриваем корабль как часть волны.
Маятник гравиметра совершает колебания относительно
горизонтального положения под действием вертикальных
возмущающих ускорений. Так как гравиметр сильно демп
фирован, отклонение маятника будет отставать по фазе от
возмущающей силы на л/2, т. е. будет пропорционально
вертикальной компоненте скорости, с которой движется
корабль в рассматриваемой гармонической модели волне
ния, и иметь противоположный знак.
В положении I и III, где вертикальная компонента ско
рости равна нулю, маятник принимает горизонтальное
положение. Проекция горизонтальной возмущающей силы
на ось чувствительности гравиметра при этом равна нулю,
да и сама эта сила равна нулю, так как в этих точках тра
ектории обращается в нуль горизонтальная составляющая
ускорения качки. В положении II скорость направлена
вниз и маятник находится над горизонтом. Проекция
горизонтальной возмущающей силы, направленной вправо,
на ось чувствительности гравиметра в этом положении
отлична от нуля; она закрутит маятник по часовой стрелке.
Очевидно, угол закручивания пропорционален возмущаю
щему ускорению ^ и углу над горизонтом ср, точнее
sin ср. В положении IV скорость направлена вверх и ма
ятник находится под горизонтом. Проекция горизонталь
ной возмущающей силы, направленной влево, на ось чув
ствительности гравиметра опять закрутит маятник по
часовой стрелке. Таким образом, и в первой половине цикла
от I до III, и во второй от III до I эффект имеет один знак
и в среднем за цикл отличен от нуля. В наблюдаемое зна-
^ (Рх
чение силы тяжести должна быть внесена поправка — ^ ср,
так как происходит кажущееся увеличение силы тяжести.
Если изменить направление движения гравиметра, то и эф
фект, и поправка изменят знак.
Математически этот эффект можно описать следующим
образом. Пусть горизонтальные и вертикальные ускорения
суть функции одной и той же частоты:
d^x
dP=ax cos (<ot + 8x),
cpz
^ 2 =az cos (cat + 6г).
(11.17)
Отклонение маятника, вызванное вертикальным уско
рением, можно представить формулой
4 = F^)a*C0S (ю/ + б*_ т ) ’ (11.18)
где S — статическая чувствительность гравиметра, F (со) —
отношение статической чувствительности к динамической.
Для гравиметра с большой постоянной времени Т прибли
женно можно записать:
(<*t + 8z — ,
сГсо
где с — цена деления гравиметра. Тогда, осредняя по
d^x
времени произведение ^ ф, получаем
< 1 U 9 >
Эта величина достигает экстремума при 6X — 8* = ± 4 ? -..
Положим 8Ж= 0, 8z = y , тогда
^ = axcosat-, ^§ = — ^sinco*. (11.20)
Интегрируя, находим
Это уравнение эллипса с полуосями ^ и ^ . Исключая t
из (11.21), получаем каноническое уравнение эллипса:
■^7^3 + ^ 1 • (11-22)
Если опора гравиметра движется по эллиптической тра
ектории по часовой стрелке, то соотношение фаз будет
(6Х — 62) = — Вследствие взаимодействия горизонталь
ного и вертикального ускорений маятник гравиметра за
кручивается также по часовой стрелке, увеличивая изме
ренное значение силы тяжести. Если опора движется
против часовой стрелки, то разность фаз составит 8Х—8г = -^
и маятник будет закручиваться против часовой стрелки,
уменьшая измеренное значение g. Отсюда ясен путь ис
ключения описанного эффекта: нужно иметь в комплекте
два идентичных гравиметра, повернутых на 180° относи
тельно друг друга. Тогда один гравиметр будет показывать
завышенное значение g, другой — на столько же зани
женное. Суммарное показание обоих гравиметров будет
свободно от этой погрешности.
Четвертый член формулы (11.13) определяет совместное
влияние наклонов гироплатформы и маятника гравиметра,
вызванное возмущающими ускорениями.
Последний член формулы (11.13) возникает вслед
ствие наклона маятника относительно гироплатформы и
равняется
4^Ф 2 = Т ^ 2 = 4 Й ? - (11.23)
Очевидно, эта поправка уменьшается с увеличением по
стоянной времени Т.
При амплитудах возмущающих ускорений ах=ау=аг=
=50 Гал, |a|max= |P |max=2,9-10"3 рад=10', |ф|тах=
—5- Ю_3 рад (5/F(co) = i0 -7 рад/мГал) получим следую
щие оценки максимальных поправок в измеренное зна-
jg a * = 4,2 мГал; ^ а = ^ |Р = 75 мГал;
Л2 у 1 —
_ с р = 1 2 5 мГал; gm p=14,5 мГал; j-g(p2 = 6,2 мГал.
В настоящее время морские гравиметрические изме
рения обеспечивают определения g с погрешностью
1—ЗмГал. Уже для этого необходима непрерывная запись
как самих возмущающих эффектов, так и их вариаций.
Дальнейшее повышение точности требует и дальнейшего
совершенствования вспомогательной аппаратуры: акселе
рографов, наклономеров и др.
§ 4. Влияние горизонтальных возмущающих ускорений
и наклонов при установке гравиметра
в подвесе Кардана
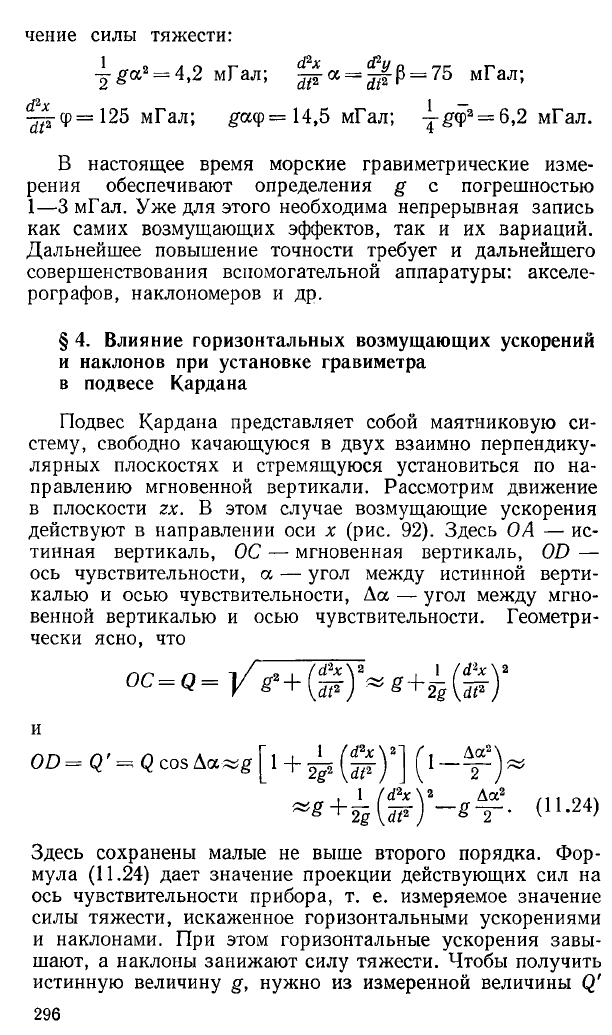
Подвес Кардана представляет собой маятниковую си
стему, свободно качающуюся в двух взаимно перпендику
лярных плоскостях и стремящуюся установиться по на
правлению мгновенной вертикали. Рассмотрим движение
в плоскости zx. В этом случае возмущающие ускорения
действуют в направлении оси х (рис. 92). Здесь ОА — ис
тинная вертикаль, ОС — мгновенная вертикаль, 0D —
ось чувствительности, а — угол между истинной верти
калью и осью чувствительности, Да — угол между мгно
венной вертикалью и осью чувствительности. Геометри
чески ясно, что
Здесь сохранены малые не выше второго порядка. Фор
мула (11.24) дает значение проекции действующих сил на
ось чувствительности прибора, т. е. измеряемое значение
силы тяжести, искаженное горизонтальными ускорениями
и наклонами. При этом горизонтальные ускорения завы
шают, а наклоны занижают силу тяжести. Чтобы получить
истинную величину g, нужно из измеренной величины Q'
и
OD= Q '= Q co sA a ^ g \\ + ~ ( ^
J _ ^ V 1 f l - ^ W
2g2 \dt2 ) 2 )
(11.24)
вычесть поправку за горизонтальное возмущающее уско
рение
Очевидно, в другой плоскости zy поправка за возму
щающие горизонтальные ускорения и наклоны будет
В выражения для поправок входят квадраты величин
несмотря на знакопеременность самих возмущений.
Полная поправка за горизонтальные возмущающие ус
корения и наклоны получится как сумма составляющих
по осям координат:
Поправки за горизонтальные возмущающие ускорения
называются поправками Броуна, по имени ученого, впер
вые указавшего на необходимость их введения.
Значения горизонтальных и вертикальных ускорений
измеряются акселерометрами. Наклоны измеряются спе
циальным прибором, регистрирующим отклонения от на
правления на горизонт.
§ 5. Способ Венинг-Мейнеса измерения силы тяжести
маятниковым прибором
Этот остроумный способ был предложен Венинг-Мейне-
сом для наблюдений на неустойчивой почве Голландии,
когда возмущающие ускорения невелики. В дальнейшем он
применял его при работе на подводной лодке и даже на
надводном судне. Поскольку вертикальные и горизонталь
ные ускорения действуют на маятник по-разному, различны
и методы уменьшения их влияния и учета.
и добавить поправку за наклоны
Полная поправка по оси х будет
d^X
-772 , . &а > т- е- поправки всегда сохраняют знак,
dt2 ’ dt2
Вертикальные возмущающие ускорения совпада
ют по направлению с силой тяжести и, будучи знакопе
ременными, так как корабль то поднимается, то опуска
ется на волнах, на большом отрезке времени взаимно
уничтожаются. Для осредненного значения вертикальных
возмущающих ускорений можно написать:
= (Ц .26)
dt2 12 — h J dt2 t2— h \ d t dt J ’ v '
где ti—tx — разность моментов конца и начала наблюде-
cfao dz-,
нии, — разность скоростей вертикальных дви
жений. Интервал наблюдений всегда можно взять та-
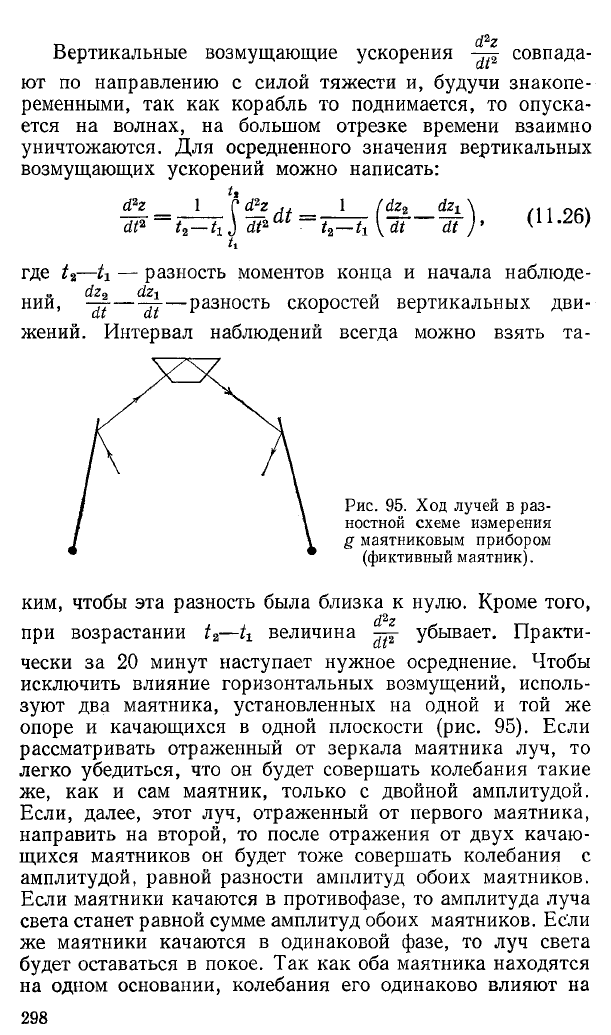
Рис. 95. Ход лучей в раз
ностной схеме измерения
g маятниковым прибором
(фиктивный маятник).
ким, чтобы эта разность была близка к нулю. Кроме того,
d?z
при возрастании t2—U величина убывает. Практи
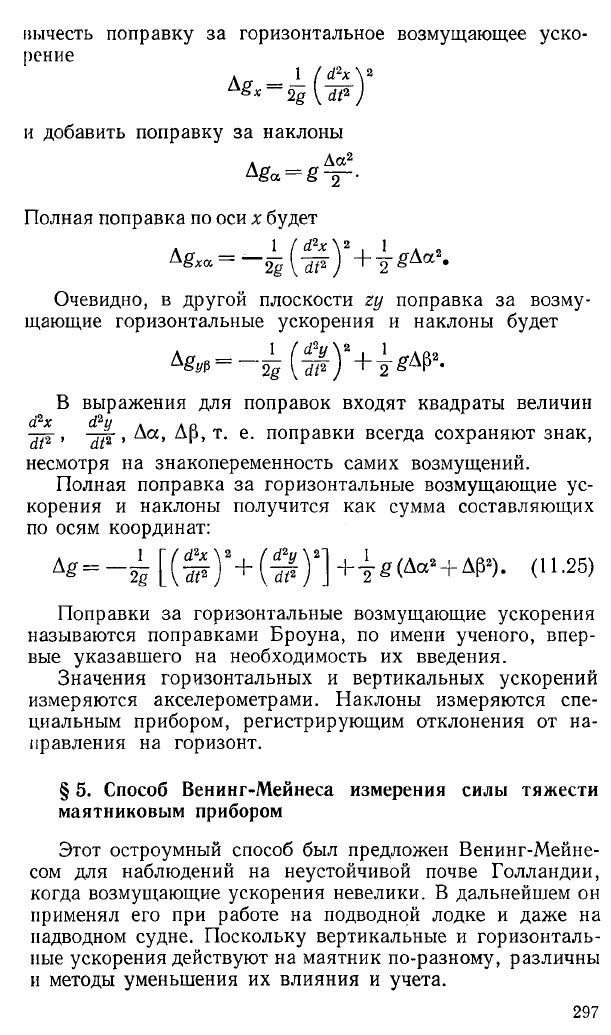
чески за 20 минут наступает нужное осреднение. Чтобы
исключить влияние горизонтальных возмущений, исполь
зуют два маятника, установленных на одной и той же
опоре и качающихся в одной плоскости (рис. 95). Если
рассматривать отраженный от зеркала маятника луч, то
легко убедиться, что он будет совершать колебания такие
же, как и сам маятник, только с двойной амплитудой.
Если, далее, этот луч, отраженный от первого маятника,
направить на второй, то после отражения от двух качаю
щихся маятников он будет тоже совершать колебания с
амплитудой, равной разности амплитуд обоих маятников.
Если маятники качаются в противофазе, то амплитуда луча
света станет равной сумме амплитуд обоих маятников. Если
же маятники качаются в одинаковой фазе, то луч света
будет оставаться в покое. Так как оба маятника находятся
на одном основании, колебания его одинаково влияют на
оба маятника и исключаются из разности их отклонений.
Таким образом, если маятники качать в противофазе, то
запись их движения друг относительно друга будет иметь
вид правильной синусоиды независимо от того, качается
штатив или нет. Покажем это математически.
Невозмущенное движение маятника приближенно опи
сывается однородным линейным дифференциальным урав
нением второго порядка:
^ + = 0, (11.27)
где — угловое ускорение, г|; — угол отклонения ма
ятника, п = |/^ -у = - ^ — собственная частота колебаний,
I — приведенная длина маятника, Т — период свободных
колебаний маятника. Если на маятник действует горизон-
d^x
тальное ускорение , вызванное смещением подвеса,
к уравнению добавится правая часть, зависящая от возму
щающего ускорения.
Для первого маятника уравнение движения примет вид
т £ + « .Ч . + т - а ? = ° * <п -28>
Для второго маятника, качающегося на одном и том же
подвесе с первым, это уравнение будет следующим:
dt% g dtz u«
d?x
В обоих уравнениях ^ одинаковы, так как это го
ризонтальные ускорения одного и того же штатива. Ма
ятники всегда можно подобрать так, чтобы периоды их
были одинаковыми, т. е. «1= п 2=л . При этих предположе
ниях вычтем одно уравнение из другого:
+ п2 (^ -ф .) = 0. (11.29)
Это уравнение имеет тот же вид, что и (11.27), т. е. опи
сывает движение некоторого невозмущенного маятника,
колеблющегося так, что угол отклонения маятника в каж
дый момент равен разности отклонения исходных маят
ников. Такой разностный маятник, полученный из двух,
был назван Венинг-Мейнесом фиктивным маятником.