Грушинский Н.П. Основы гравиметрии
Подождите немного. Документ загружается.

незакрученное положение нити; ■& — закрученное поло
жение нити; т — коэффициент крутильной жесткости нити.
Теперь уравнение равновесия крутильной системы будет:
Если считать, что в пределах коромысла гравитационное
поле изменяется линейно, то горизонтальные составляющие
силы тяжести gy, gx можно выразить через значения (gy)0,
(Sx)o и их производные в начале координат в виде ряда
^Однако в начале координат сила тяжести направлена
по оси г (нить подвеса, вдоль которой выбрана ось г, рас
полагается по отвесной линии) и составляющие ее по
координатным осям равны нулю:
Заметим, что производные от gx и gv соответственно
Имея все это в виду, представим уравнение (10.35) в
следующем виде:
Wд ^ xydm + Wxy ^ (х2 — г/2) dm + WlJZ J xzdm —
- W xz\yzdm = T (ft-& 0), (10.37)
Напишем это уравнение относительно координатных
осей £, г), £. связанных с коромыслом. Формулы преобра
зования старых координат к новым будут:
х = |c o sa — т] sin а; у = £ sin а ~f r]cos а; z = £,
где а — угол хО%, т. е. азимут коромысла.
(10.35)
(g*)o = (gj,)o = 0-
равны:
где
Wb=Wyy- W xx,
Вводя эти преобразования в (10.37), получим
,'г Г д [sin 2а J ( |2 —гf)dm + 2 cos 2а ^ }dm +
-{-WXs/ [cos 2а ^ (£2 — г]2) dm — 2 sin 2а J £r| dm J 4-
+ Wyz [cos a J dm — sin a J r]£ dm] —
[sin a J |£dm + cosa jj r)£dm] = r(ft —ft0). (10.38)
» to основное уравнение вариометра. Его можно упростить,
выбрав соответствующую систему подвеса и устройство
коромысла. Коромысло делается в виде тонкого легкого
стержня (из дюралевой трубки) симметричной формы с гру
шками на концах, так что массу грузика можно считать то
чечной. Во всяком случае, в пределах массы грузиков
т. е. расстояние от начала координат по оси | до грузика
намного больше его толщины. Поэтому приближенно можно
считать
5 (I2 — Л2) dm т J ( |2 -j- г]2) dm = К,
где К — момент инерции коромысла относительно верти
кальной оси. Момент инерции может быть определен, как
будет показано далее, по периоду колебания системы.
Так как коромысло симметрично относительно плоско
сти £0£, то в нем каждой элементарной массе с коорди
натой +т] соответствует масса с координатой —г). Поэтому
интегралы, содержащие т] в первой степени, обращаются
в нуль. Теперь уравнение (10.38) можно записать в более
простом виде:
2
KW \ sin 2a + KWxy cos 2a -f WIJZ cos a J ££
dm
— Wxzs\na ^ dm ==%(§ — \}0), (10.39)
где Г д, Wxy — вторые производные потенциала, харак
теризующие кривизну уровенной поверхности в точке
наблюдения; Wyz, Wxz горизонтальные градиенты силы
дв де
тяжести п-| и щ ; а — азимут коромысла, величина,
с достаточной точностью определяемая установкой прибора;
К, т — постоянные прибора, определяемые в лаборатории;
\}0 — неизвестное незакрученное положение коромысла и,
наконец, два интеграла, которые могут быть вычислены
для каждого конкретного коромысла. Таким образом урав
нение (10.39) содержит пять неизвестных. Если прибор
устанавливать в пяти азимутах а ь а 2, а 3, а 4, а 5, то мы
получим пять уравнений, из которых можно найти все
пять неизвестных.
Рассмотрим несколько частных случаев.
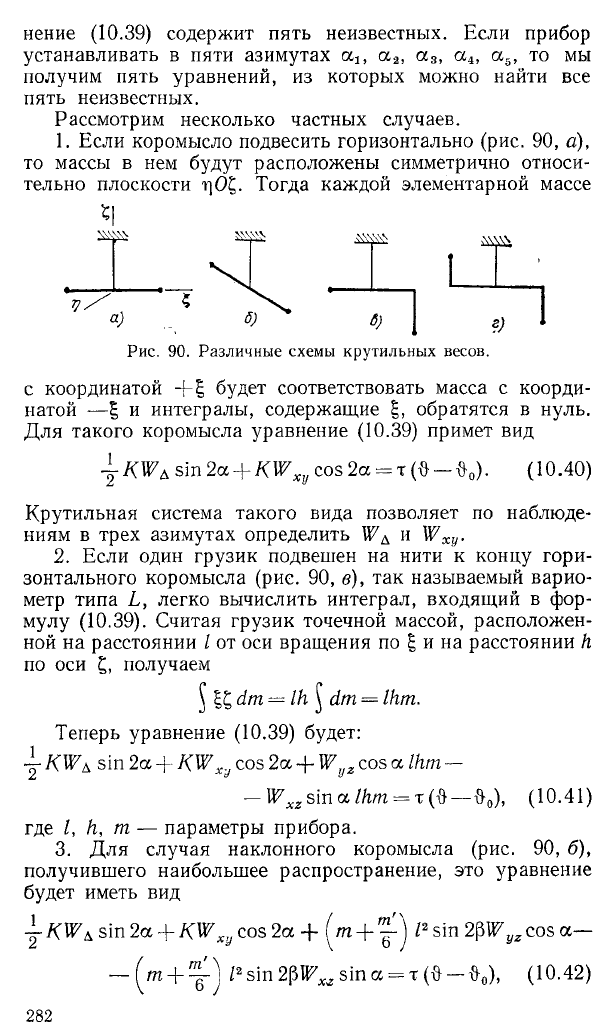
1. Если коромысло подвесить горизонтально (рис. 90, а),
то массы в нем будут расположены симметрично относи
тельно плоскости г]0£. Тогда каждой элементарной массе
*1
Рис. 90. Различные схемы крутильных весов.
с координатой £ будет соответствовать масса с коорди
натой —| и интегралы, содержащие |, обратятся в нуль.
Для такого коромысла уравнение (10.39) примет вид
■j KWA sin 2а + KWху cos 2а = т (ft - ft0). (10.40)
Крутильная система такого вида позволяет по наблюде
ниям в трех азимутах определить WA и Wxy.
2. Если один грузик подвешен на нити к концу гори
зонтального коромысла (рис. 90, в), так называемый варио
метр типа L, легко вычислить интеграл, входящий в фор
мулу (10.39). Считая грузик точечной массой, расположен
ной на расстоянии I от оси вращения по £ и на расстоянии h
по оси £, получаем
J ££ d/n = lh^ dm = Ihm.
Теперь уравнение (10.39) будет:
Y KWA sin 2а + KWXy cos 2а -|- Wyz cos а Ihm —
— Wxz sin a Ihm = т (ft— ft0), (10.41)
где I, h, m — параметры прибора.
3. Для случая наклонного коромысла (рис. 90, б),
получившего наибольшее распространение, это уравнение
будет иметь вид
у KWд sin 2а + KWxy cos 2а -f [jn + J /2 sin 2$Wyz cos а —
— {m Jr r^ I2 sin 2$WX£ sin а = t (ft — ft0), (10.42)
где tn — масса грузика, т' — масса коромысла, К — мо
мент инерции коромысла относительно оси £, р —• угол
наклона коромысла к горизонту, I — проекция коромысла
на горизонтальную плоскость.
Рис. 91. Общий вид вариометра Е-60.
Известно много моделей гравитационных вариометров.
Они различаются в основном системой коромысла и вре
менем затухания колебаний. В принятых у нас сокращен
ных названиях заложены обозначения этих характеристик
вариометров. Известны вариометры L-40, Z-40, Z-30,
S-20 и др.; буква в этих обозначениях выражает тип
коромысла (L-образное, Z-образное и др.), число — время
полного затухания колебаний коромысла в минутах. Общий
вид вариометра приведен на рис. 91.
Г Л А В A 11
ЭЛЕМЕНТЫ ТЕОРИИ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ
НА ДВИЖУЩЕМСЯ ОСНОВАНИИ
§ 1. Об Определении силы тяжести на море
До сих пор мы рассматривали методы определения g
на стабильном основании. На первый взгляд кажется, что
иначе и невозможно. Выполнение измерений с погрешно
стью 10~7—10-8 от измеряемой величины кажется воз
можным лишь на незыблемой основе. Однако 3/4 земного
шара покрыты водой и нельзя изучить гравитационное
поле Земли без проведения наблюдений на океанах, а
это, в свою очередь, требует умения производить наблю
дения на кораблях, т. е. на движущемся и раскачиваю
щемся основании. Конечно, можно наблюдать на дне, но
это еще труднее, ведь глубина океана повсеместно 3—
5 тысяч метров. Необходимость в морских гравиметриче
ских работах диктовалась не только научным интересом
изучения гравитационного поля Земли в целом, но и пря
мыми экономическими задачами: поиском нефти и газа на
шельфе и в более глубоких областях океана. В связи с
изучением труднодоступных районов, таких как Арктика
и Антарктика, нужно было научиться измерять силу
тяжести на самолетах.
Так возникла задача измерения силы тяжести на под
вижном основании. Принципиально эта задача была решена
для маятникового метода измерения силы тяжести гол
ландским геофизиком Венинг-Мейнесом в 1923 г. Грави
метры для измерений g на море впервые были применены
Хальком и Норгардом в начале тридцатых годов, однако
без особого успеха. Это были газовые гравиметры.
Существенные результаты в этой области были достиг
нуты в пятидесятых годах, когда были впервые применены
статические гравиметры с большим демпфированием. Слож
ность работ на море возникает из-за возмущающих уско
рений и наклонов корабля, на котором производятся
работы. При этом в направлении, противоположном воз
мущающему ускорению, возникает сила инерции гп-щъ ,
которая, складываясь с силой тяжести mg, постоянно
изменяет ее и по величине и по направлению. Вектор силы
инерции может быть разложен на три составляющих, на
правленных по осям координат х, у, z. При т—1 эти со
ставляющие будут
Направления х, у, г выбираются следующим образом:
ось z направлена по нормали к земному эллипсоиду, которая
с точностью до уклонения отвеса совпадает с направлением
полного вектора силы тяжести; ось у проходит по каса
тельной к меридиану; ось х — в плоскости первого верти
кала. Тогда вектор
будет характеризовать в каждый момент времени полную
силу, действующую на чувствительный элемент измери
тельного прибора. Эта величина называется мгновенной
силой тяжести, а направление вектора мгновенной силы
тяжести — мгновенной вертикалью в отличие от истинной
вертикали, направленной по линии действия невозмущен
ной силы тяжести.
Гравиметр или маятниковый прибор измеряет верти
кальную составляющую силы тяжести, отягченную вер-
d?z
тикальными возмущающими ускорениями, т. е. g + ^ ,
причем зарегистрировать ее он может в некотором направ
лении, строго фиксированном относительно рамы прибора.
Это направление называется осью чувствительности при
бора. Показания гравиметра определяются проекцией
вектора мгновенной силы тяжести на его ось чувствитель
ности. Направление оси чувствительности при наблюдениях
па море непостоянно. Оно изменяется под влиянием воз
мущающих ускорений и наклона судна, что создает допол
нительные искажения отсчетов.
В силу принципа эквивалентности инертной и гра
витирующей масс ускорение свободного падения и инер
ционные ускорения неразличимы. Выделить гравитацион
ную составляющую удается только потому, что во время
d?z
движения корабля g изменяется медленно, тогда как —
сРх d2y d2z
d F ' dt* '
вертикальные возмущающие ускорения от качки кораб
ля — имеют высокую частоту.
Применяя тот или иной метод частотной фильтрации,
удается выделить из общей картины колебаний низкоча
стотную часть — собственно величину ускорения силы
тяжести.
§ 2. Определение силы тяжести на море
статическими гравиметрами
Если упругую систему сильно задемпфировать, так
чтобы частота ее собственных колебаний стала гораздо
меньше основной частоты качки на волне, т. е. возмущаю
щих ускорений, то такая инерционная система окажется
мало чувствительной к качке, но будет «следить» за мед
ленно меняющимися вариациями силы тяжести, т. е. за
изменениями ее при перемещении судна. На этом и осно
вано применение статических гравиметров на море. Можно
упругую систему задемпфировать настолько, чтобы она
стала апериодической, т. е. будучи выведена из состояния
равновесия, возвращалась в него монотонно. Процесс
возвращения упругой системы от мгновенно измененного
состояния (быстрая смена курса и т. п.) к положению
установившегося равновесия называется переходным про
цессом. Чем сильнее демпфирована система, тем длиннее
переходный процесс.
Если применить гравиметр с горизонтально расположен
ным маятником, да еще с нулевой системой отсчета, то на
такой гравиметр мало будут действовать непосредственно
горизонтальные составляющие возмущающего ускорения
(эффекты первого порядка), т. е. моменты сил горизон
тальных возмущений для такой системы будут
Мх = т I sin а,
где т — масса маятника системы, I — расстояние от оси под
веса до центра тяжести маятника, а — угол наклона маят
ника к горизонту. При строго горизонтальном положе
нии маятника (а=0) возмущающий момент равен нулю.
Чтобы избежать значительных наклонов гравиметра
(когда начинают действовать сами наклоны и горизонталь
ные возмущающие ускорения), его помещают на гироста-
билизированную платформу, т. е. устанавливают по ис
тинной вертикали (если не считать погрешностей стабили
зации). Главным источником погрешностей измерений в
таких условиях являются вертикальные возмущающие
ускорения, амплитуда которых при наблюдениях в ус
ловиях большого волнения в десятки и сотни тысяч раз
может превышать величину измеряемой вариации силы
тяжести. Выделение последней на фоне громадных инерци-
лльных возмущений происходит в основном за счет изби
рательной чувствительности морских затушенных грави
метров, «настроенных» на низкочастотные вариации силы
тяжести. Остаточные возмущения, неотфильтрованные дина
мической системой гравиметра, снимаются на стадии обра
ботки результатов измерений. Простейшим алгоритмом
фильтрации на этой стадии служит временное осреднение
в некотором интервале. Заметим, что при измерениях
с морским струнным гравиметром, являющимся безынер
ционным прибором, вся фильтрация производится на
стадии обработки.
На упругую систему, основными элементами которой
являются горизонтальная упругая нить или пружина и
закрученный на них маятник, находящийся в равновесии
в горизонтальном положении, действуют следующие ос
новные обобщенные силы: момент силы тяжести mgl cos а,
момент упругой силы крутильной нити т(90+ а). Здесь I —
длина маятника от оси подвеса до центра масс, а — угол
наклона маятника к горизонту, т — коэффициент крутиль
ной жесткости нити, 0О — угол закручивания нити, при
котором маятник занимает горизонтальное положение.
Уравнение движения чувствительного элемента гра
виметра на борту судна складывается из момента силы
Сра
инерции маятника т / 2^ 2-, момента демпфирования,
пропорционального угловой скорости движения маятника
Н (где Н —; коэффициент демпфирования), момента
вертикальной составляющей качки mlaz cos соt (где az ■—
амплитуда ускорения вертикальной качки, со — угловая
частота колебаний, равная доминирующей частоте вол
нения).
Уравнение движения маятника получается как сумма
всех этих моментов:
m l ^ -\-mglcosa + x(Q0 + а) + H ^-\-m la2cosat=0, (11.1)
или, разделив на ml2, получаем
^2а I g I т /п 1 4 I Н da , а , , п ,, 1 оч
Щ* Т cosa т Щ? (° а ) ~mfi ~dt ~f C0S = * (lL2)
где g=go~\-Ag(f). В положении равновесия при условии
az= О обеспечивается горизонтальное положение маятника
(а=0) и
Тогда уравнение движения вблизи положения рав
новесия можно написать в виде
Это линейное дифференциальное уравнение второго
порядка, общее решение которого при Ag(t)=0 распадается
на собственное апериодическое движение системы и вынуж
денные гармонические колебания на доминирующей ча
стоте волнения со:
где а-i характеризует собственное движение системы, а 2 —
вынужденные колебания под действием возмущающих
ускорений; alt а2 — действительные отрицательные числа:
Амплитуда и сдвиг фазы вынужденных колебаний опреде
ляются соответственно выражениями
Собственные колебания при установившемся процессе
можно не рассматривать. При со=0 вертикальную состав
ляющую можно считать постоянной величиной, тогда
Это так называемая статическая амплитуда отклонения
маятника гравиметра. Отношение а2/астатт называется
коэффициентом динамичности %:
mgal = — 60т.
_j_ fk cos at = 0, (11.3)
где
— a2ea,i) -)-a2 sin (co/ + 6), (11.4)
®1> 2
e + У г2 — n\.
(11.5)
^2|ю= 0 —
'статич
(И.6)
Коэффициент динамичности характеризует степень умень
шения амплитуды вынужденных колебаний маятника гра
виметра по сравнению с амплитудой, вызванной знако
переменными гармоническими ускорениями. Величина, об
ратная коэффициенту динамичности & = у , называется
коэффициентом подавления помех. В случае s = ~ ~ вы-
г 2
ражение (11.7) для к совпадает с амплитудной частотной
характеристикой фильтра Баттерворта второго порядка.
Фильтры Баттерворта обладают тем замечательным свой
ством, что среди всех прочих фильтров нижних частот
с одинаковым подавлением помехи на частотах со^>п0
они меньше всех искажают полезный сигнал — в нашем
случае вариацию силы тяжести. Так устраняется влияние
главной помехи — знакопеременных вертикальных возму
щающих ускорений.
В сильно демпфированной системе е^>п0, п0> 0, поэтому
приближенно
— Hi t
(Xj = айе 28 жа0е т .
2&
Величина Т = -% называется постоянной времени. Она
имеет размерность времени и равна времени, за которое
отклонение маятника от положения равновесия, вызван
ное импульсным воздействием, уменьшается в е раз. Чем
больше постоянная времени Т, тем медленнее переходный
процесс. Сильно демпфированные системы позволяют из
мерить силу тяжести на борту корабля с погрешностью
до 1 мГал. Однако демпфирование приводит к запазды
ванию показаний гравиметра по отношению к изменениям g
по пути хода корабля. Чем больше постоянная времени,
тем больше такое запаздывание. Обычно величина Т равна
200—400 с. В этом случае при движении корабля со ско
ростью 30 км/ч измеренное в данный момент значение
силы тяжести должно быть отнесено к точке, где корабль
200
был 200—400 с тому назад, т. е. на расстоянии 30^-^ =
= 1,7 км или 3 0 ; ^ = 3,3 км позади корабля. Это об
стоятельство особенно важно иметь в виду при больших
горизонтальных градиентах силы тяжести.
Создание гравиметров с непрерывной регистрацией по
казаний позволило заменить наблюдения на отдельных