Годфри Д. Теория упругости и пластичности
Подождите немного. Документ загружается.

Б.
Р
е
зультирующие
по
J(ОRцам
Напmnем
выражение
для
результ
и
рYIОЩ
ii
си
11)1
И Р
з
'ЛLТиру-
ющего
момента
по
сеченmо
(рис
.
17)
'1
ереэ
I\ОШJоненты
u
<:
.'
1'-
Д
10
ще
м
в
иде:
F = Xi + Yj + Zk
и
G = Li + M j + k.
в
дадьв
.й.шем
будем
пр
и
держиваться
:)тих
обозu
'1
юШ.
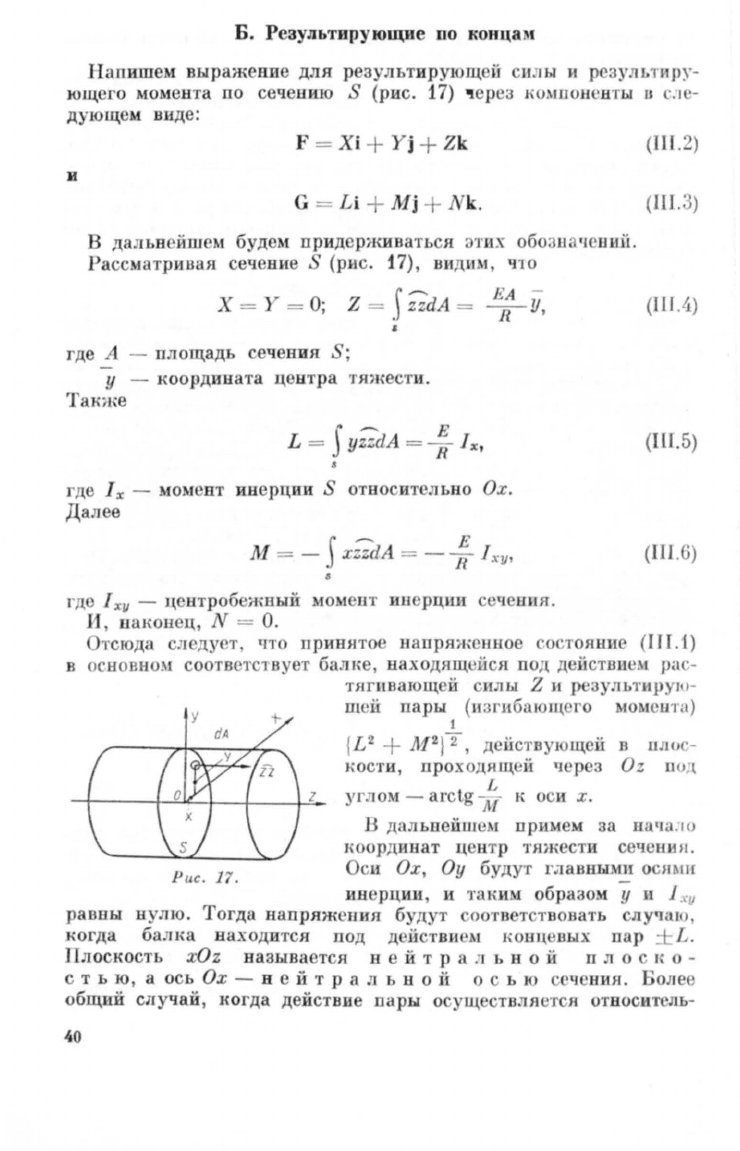
Рассматривая
сечение
(рис.
17),
ВИДI1М,
ч
то
с........
ЕА
-
Х
=
У
=
О;
Z = J zzdA =
lГ
Y
,
где
А -
площадь
сечения
у
-
}{оордипата
Ц
нтра
тяжести.
Такще
S
,....
Е
L = yzzdA
=
7Г
1"
.
где
1" -
момент
инерции
Да
1
е
$
относительно
О
х.
r
........
Е
М
= -
.J
xzzdA = - R 1
ху
,
где
1
"11
-
Ц
нтроб
жный
мо
~
пт
ин
РЦIШ
сечения.
И,
наконец,
=
О.
(
Ш
.•
)
(Ш.3)
(111
.
4)
(
Ш.5)
(IП
.
6)
ТСIOда
сл
дует,
что
ПРИНЯТО
напряж
иное
со
тоя
ни
(Пf.l)
В
основном
соотв
тст
вует
балке,
иаходящ
йся под
Д
йстви'М
ра
-
тяги.ваIOщеЙ
илы
Z
и Р
ЗУЛЬЗ'Иj>
10
-
шей
пары.
(изгибающего
ЮJl1сnта)
1
{
и
+
M2j2
действующеii
в
DJIU
-
кости,
прохо
нщей
ч
р
з
Oz
пи
,,!
L
-;----1~JL..+-1f--~
z
'-
углом
-
al"ctg
JI[
J{
оси
Х
.
В
далъпеЙI1НШ
примем
за
И3'Т3.I
О
J\
ординат
центр
тяжести
сечснин.
Р
ис.
17.
си
Ох,
Оу
будут
r
..
laBIlLL\~
о
НАШ
инерции,
и
таЮНf
обраЗО
.
l
у
и
1
'\'1/
равны
нулю.
Тогда
наПРЯЖСDИЯ
б
д.
т
оотв
тствовать
ЛУ'lalО,
когда
ба
.
Т
JI{а
находится
под
Д
Йст.ви
"1
I,ОIЩ
вых
пар
± L.
Пл
о
ск
о
сть
xOz
называется
пей
т
р
а.rl
Ь
н
ой
п
л
О
I(
О
-
С
Т Ь
10,
а
ось
Ох
-
н
е
й.
т
р
а
л
ь
н
О
11:
о
ь
10
.
Ч
нин.
Боле
общий
СlIучай,
к
о
гда
действие
пары
о
уществлястся
ОТПОСИТeJ1Ъ
-
40
но не
главной
о
и ч
ения
(см.
27.
аЛJ<а
под
действи
м
I{онц
евых
мом
I1ТОВ
.
Г.
3аоисимо
тъ
меж
ду
DЛОСНОСТЯ
1И
изгиба
и
пр
и
ло
ж
ИНЫХ
пар).
В.
Пер
~
Iсщ
е
uuя
На
о
JfООЮ
J
Ю1
зrши
I1МОСТ
u
(
Н
.34)
и
(
II
.3 )
деформации
моааю
за
ли
ать
в
тано
м
uи
де:
дu
"у
оу
=
-
у,
)
(III.7)
€x y =
€x>
=
€!l
. =
О.
Интеl'РИРУЯ
:НИ
ураВIL
пия
и
u
У'Jитывая
пере
ющ
Ю
I
Я
жестного
l'
JCl
.
находим:
v
и
=
-n
ху;
v = -
2~
{ZZ
- V
(х
2
_
у2)
};
1
IC =
7(
у:.
1
~
(
Ш
.8)
J
д
н
тоrll<14
на
о
11
;;
перемещ
ни
составит
(и
о
и
о
,
1["0)'
где
_З
llо
=
Ш
О
=
О,
и
о
= -
2
~
Л
'
(l
Н
.
9)
оп,уда
ВI1ДIIО,
что
бал
'
.
а
изгиба
тся
в
n.тl0
'{ости
yOz
(В
ПJIОС
ГОСТИ
1I
3"
11ба).
1
1:1.
101
обраЗ0М,
сли
О
х
сть
Г
[аввал
сь
юз
'рции,
то
ГСОIeТр
1"ЧС
1,<lH
ось
балки
JtСI<РИВЛЯ
тсл
В
ПЛО
J~o
'т
и
прилож
Н
ной
JJapbl.
друг
их
с
JУ'I<lЯХ
плоскость изгиба
Jf
ш/о
кость
J\
ИСТ
оия
пары
ll'
овна
ают.
,
Тсп
рь
можем
установить
фи
зи
ческнii
смысл
постояuной
R.
rJlv
1
Из
(III.9)
az:
=
-7['
а
таи
l{ак
веЛИ'lИва
av/az
Ma
:.J<l,
то
ВJЩИМ,
что
R
но
нетсн
радиусом
КРИВJlЗНЫ
J1ЗОГН
той
си
O
z.
ОТРIЩ
il
Т
ль
ныи
знак
означает,
что
ба.'Iка
OJ
азыва
тел
вогиутоii
е
ли
НОН
J\CBLI
пары
Д
ЙСТD
ют
так,
J<al~
описано
D 27.
Баш,а
под
дей
тв}!
м
нош~евы
-
мом
н"ов,
Б.
Р
з
J
/ЬТИРУЮЩИ
по конца
1.
Да
J
Jее,
JIIO-
бое
во
/окно,
паралл
лъпо
Oz
и'
ПРОХОДЯJЦсе
череа
т
чку
(l~,
",
z),
изгиба
т я
ПО
j
{
РИВОЙ
той
jlЩ
НрllВИЗUЫ
потому
что
па
о
новаrшu
(IП.
) v = -
2~l
(
:2
-
'v
(l~2-k2)
)
,
И
таним
обра
ом
снова
JlМ
м
q2
V
а;'
-
Л'
В
пр
дедах
ПрИRН
'
ГОЙ
точно
ти
:)тот
рез
льтат
в
оБЫЧ1:l0Й
теории
Jl31
'
/Jба
.которая
предполагает
противор
чит
общи
й
ц
е
н т
р
41
нривизны
для
всех
таких
волокон,
ТЮt
как
R
значительно
превос
хо)(Ит
у.
'v
2
{РI1
'11
Для
волокв.а
Ох,
и
= w =
О
и
v = 2R
х,
отItуда
дzl
= R
If.
следовательно,
балка
изгибается
в
направлении,
противополож
ном
изгибу
оси
Oz,
при
радиусе
I{РИВИЗНЫ,
равном
R/v.
И,
наконец,
волокно,
параллельное
Оу
и
проходящее
через
то
'шу
(О,
У,
k),
подвергается
следующей
деформации:
1 k
и
=
О,
V = -
2п
(kЭ
+
'Уу2),
W = R
у.
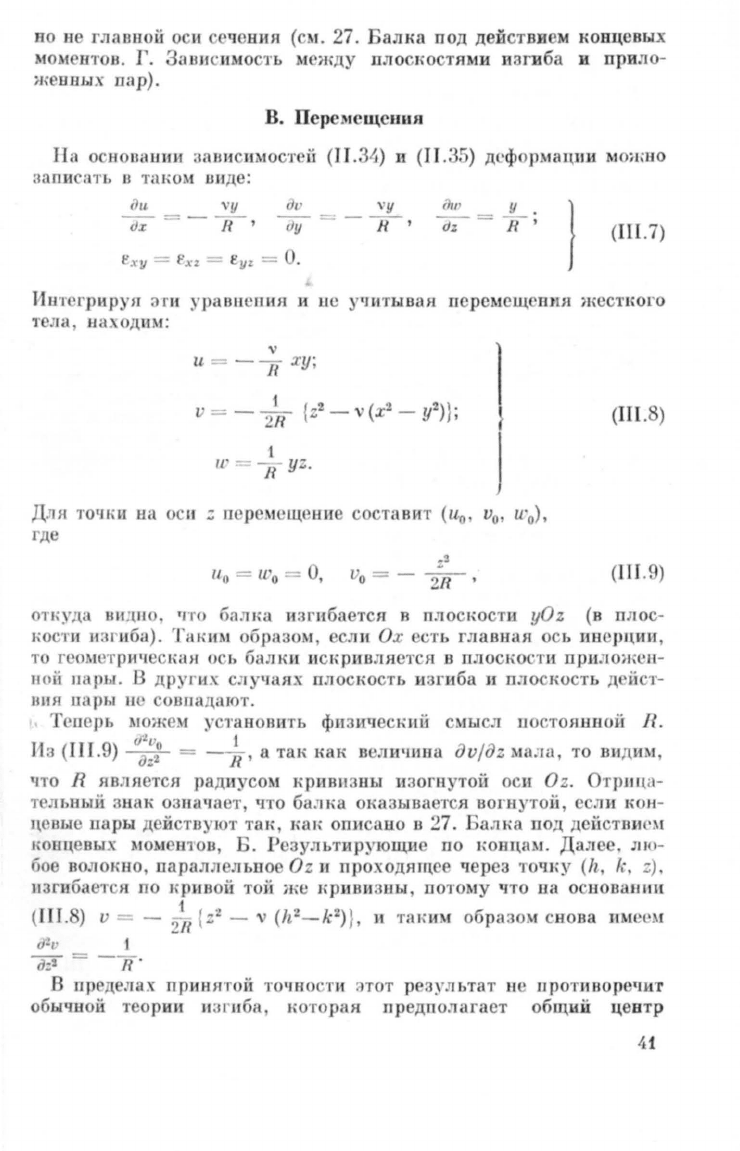
л
I1вей
.
ный
характер
величивы
w
СВИJ\етеЛЬС1'вует
о
том
I
ЧТО
BOJIOl,H~
поворачива
ется,
но
остаеreя
прямолинейным.
При
этом
из
величины
угла
поворота
k/R
следует,
что
ВОЛОIШО
проходит
через
центр
нривизны
окруж
ности,
форму
которой,
деформи-
Рис.
18.
руясь,
приобретает
ось
z.
В
за-
юпочение
заметим,
что
балка
IiBaApaTH
oro
сечения
в
деформированном
состоянии
приобретае1
'
В.lЩ,
показаннын
на
рис.
18.
Г.
Завис
имо
сть
между
плоскостя
щ
IIзги
ба
и
ПРШlOжеШIhIX
пар
Здесь
будет
целесообразно
принять
за
оси
коордиват
гдавные
оси
инерции
с
начаJIОМ
n
центре
тяжести
сечения.
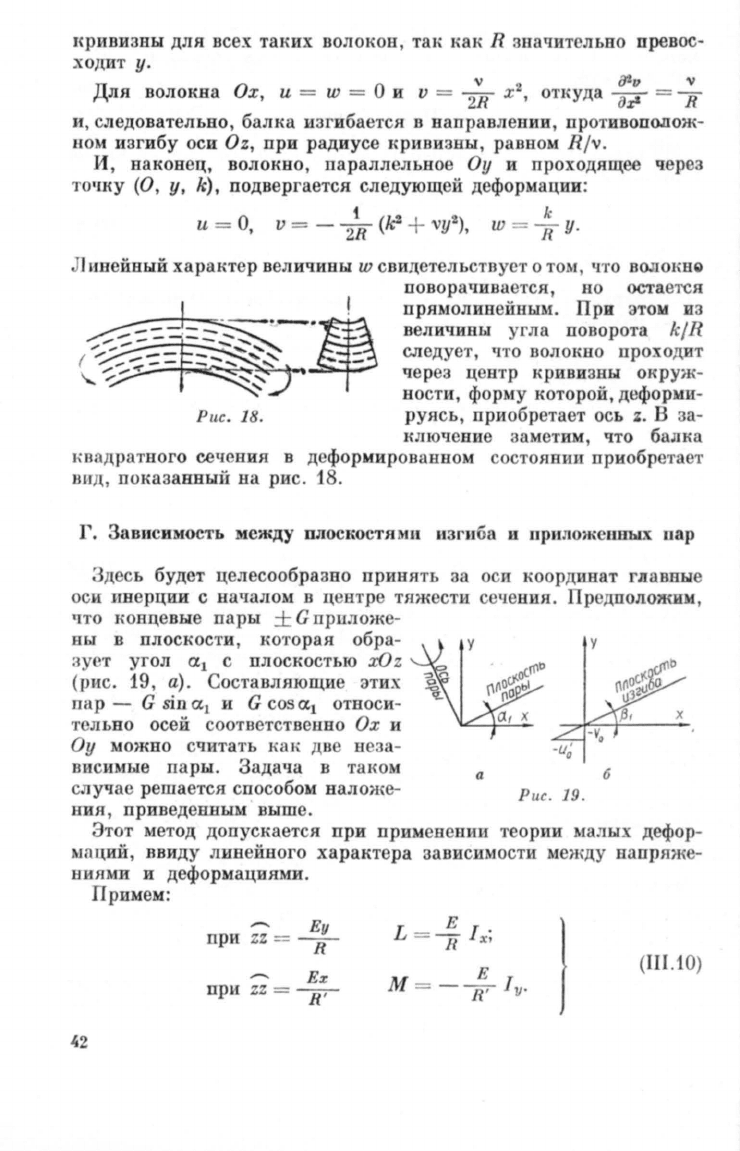
Предположим,
что
нонцевые
пары
±
Gпрnложе
ны
n
плоскости,
l(оторая
обра
з
ст
утол
(Хl
С
плоскостью
xOz
(рис.
19,
а).
Составляющие
этих
пар
- G sin
(Х)
Jl
G
cos
(Хl
относи
Т
льно
осей
соответственно
Ох
и
Оу
МОflШО
считать
HaJ,
две
неза
висимые
пары.
Задача
в
тано
f
случае
решается
способом
наложе
ния,
приведеннымвыше.
а
-и;
Р
ис.
19.
у
х
б
Этот
метод
ДОПУСI<ается
при
применении
теории
малы
дефор
маций,
ввиду
линейного
характера
зависимости
между
напряже
ВМЯА!U
и
деформациями.
Прuмем:
-.
Еу
при ZZ =
~
Еж
при
zz
=
'If'
I
(Ш
.
10
)

Так
L
как
М
= -
tga
1
,
то
плоскость
пары
R'
/"
tga
1
=
-л
-/
-.
JI
(111.11)
Интегрируя
в
торое
выражение
из
(III.10),
получим
проекцию
Д
формации
(и',
и',
ш')
на
Oz
и
о
= -
2~"
и~
=
ш~
=
О.
(111
.12)
Т
I(уда
полощение
ПJIOскости
изгиба
(рис.
19,
6)
v
R'
tg~l
=~=
T·
и
о
(111.13)
л
довательно,
взаимное
положение
указанных
плоскостей
опре
делится
из
соотношения
(lП.14)
Из
этого
соотношения
следует,
что
в
случаях,
когда
1" =
l
у
,
баЛl(а
будет
изгибаться
в
плоскости
действия
пары.
Очевидно,
;>ТО
действительно
для
случаев
квадратного
или
круглого
сечения,
ДJJ1I
ноторых
<JЛЛИПС
инерции
есть
окружность
•.
д.
Нейтральная
ОСЬ
Найдем
положение
нейтральной
оси
для
изложенного
в
пр
еды
у
щем
разделе
общего
СJlучая,
в
котором
дополнительно
действует
растягивающая
сила.
Для
этой
цели
используем
напряжеввое
ос
тояние
(111.10)
совм
стно
с
состоянием,
когда
~
=
Т.
Тогда
с
ммарное
норtально
напряжение
........
Ех
Еу
zz
=
[[г
+
7Г+
Т
.
(III.15)
Таиим
образом
нейтральная
ось,
которая
является
геометриче
ским
м
стом
нулевых
нормальных
напряжений
,
определится
урав
нением
:&
У
Т
у
+
т+т=О,
(Ш
.
16)
R
Тан
как
угол
нанлона
этой
оси
равен
arctg
7'
то
из
(111.3)
видим,
что
она
является
перпендикулярной
к
плоскости
изгиба,
Q
нано
не
проходит
через
центр
тяжести
сечения
(О,
О)
если
т
=t
О.
•
то
ПМ
от
м
сто
n
ДЛЛ
любого
сложного
составного
сечеllИЯ,
еСЛ\J
1"
"'"
/11
-
Прu~
.
р
ед
.
(3
28.
ВЫЧИСЛЕНИЕ
ГЛАВНЫХ ЮМЕНТОВ
ИНЕРЦИИ
При
J4
пользовании
приведевного
метода Д
/я с
'1СН1'Iп
У
"от
о
рых
по
roжевие
Ц
нтра
тнже
·ти
и
гла
вных
о
ей
н
ЛВМ/
'тел
оч
-
ВИДНЫМ
,
Н
обходимо
определить
ПОJlОЖ
НI1В
ЭТ
JIХ
О
ей
и
главные
мо
lен
ты
инерции
относительно
этих
осей.
llок
аще
м
')'1'0
ДЛfl
•
тои
це
и
можно
использовать
круг
10ра
(с
J.
рис.
11)
.
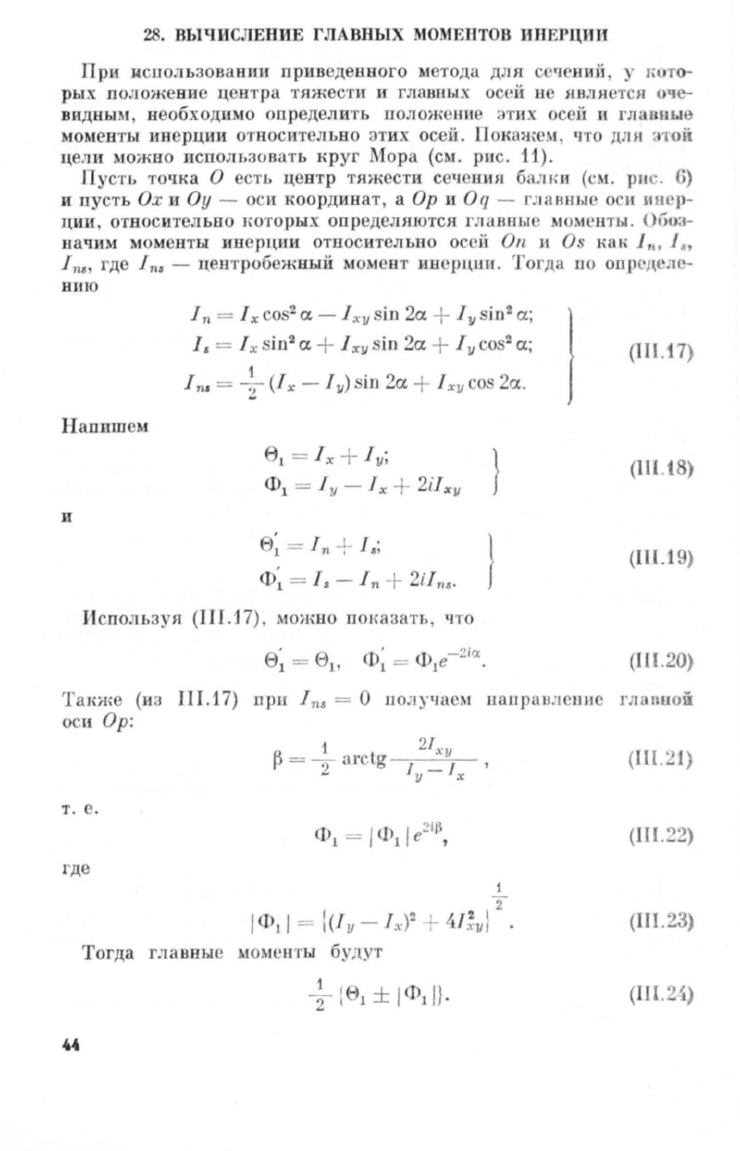
Пуст!..
TOQKa
О
есть
центр
тяж
сти
сеч
вил
ба
l/
i
И
(е
1.
рв
(;.
6)
и пу
ть
О
х:и
Оу
-
оси
координат,
а
Ор
J1
Oq
- r
)энныо
ОСII
И1lер
J\ИИ
,
относительно
1\0ТОРЫХ
опр
демпотся
['
)авпы
)
мен
ты.
0003-
JJачим
мом
НТЫ
инерции
относительно
о
'Й
Оп
.и
Os 1,31 1, .. 1 ••
1,,.,
где
J". -
r~
птробещвый
мом
НТ
инсрщш.
Тог
да по
опр'
"
:
18-
юно
Напиш
е
м
и
l
"
=
[ХСО
2
а
-
l
ХIJ
iп
2а
+
111
in
2
a;
I.
= [ x
in
2
a + 1
xII
in2a
+ l1/co
2
a;
1". =
+(Jx
-
11/)
iJ1
2а
+ J
X
1/CO
2а.
L = l
x
+ I/I;
Ф
1 = 1
у
- ]
х
+
2а
Х
1/
}
: = I
n
+ J.;
Ф~
=
[.
- J n + 2; 1",.
}
Испо
IЬЗУЯ
(III.17),
МОЖНО
по)<аза
'Гь,
что
J
(II1.17)
(111
.1 )
(111.19)
(111
.20)
'Гана;е
(из
JlI.17)
при
1
'1&
=
О
J/о
лучае
м
нащ
U1J.чеИI1
ГJlапuой:
ОСН
Ор:
Т.
е.
где
1
2[:0:
у
~
=
2"
3'·
tg
---'
1
'-
1I
--
'---"-,
/
-X-
,
1
2
I
ФJ
1= l(Jy - 1
>;
)2
-L
4/
;1/1
Тогда
главные
мом
'НТЫ
БУ/1УТ
(Нl
.
~I)
(ПI
.
~2)
(111.23)
(Ш
.
2't)
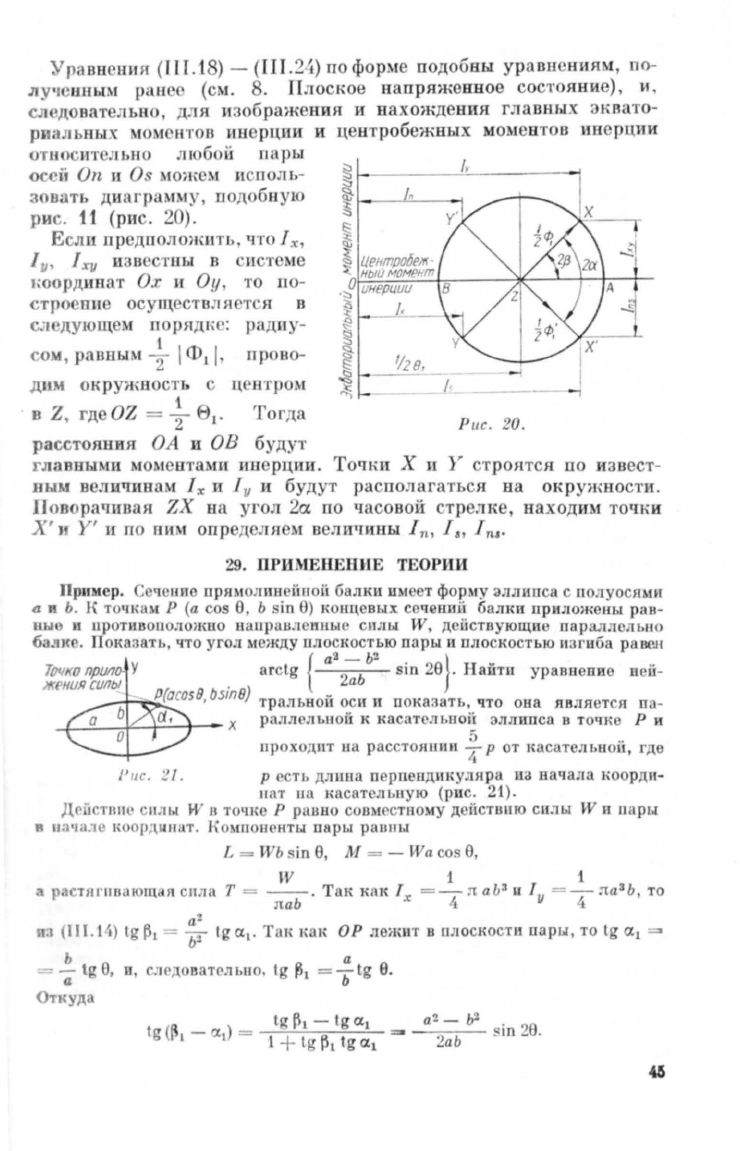
Уrавп
IПfЯ
(rII.18) -
(ПI.2
)
по
форме
подобl:Lbl
уравн
ния
1,
по
ЛУ'ЮЦВЫМ
ран
(см.
8.
Плоское
напряженное
состояние),
и,
следо
ват
J
IЬП
,
д.
я
изобрюк ния
И
нахождения
главных
квато
РИ3JlЬПЫХ
юм
НТО
В
инерции
и
центробежных
моментов
инеРЦllИ
отио
ит
ДЬНО
ЛI
бой
пары.
осей
Оп
и
Os
можем
JI
поль
зовать
диаграмму,
по
оБНУl
рис.
11
(рис.
20).
Если
предположить,
что
1
х,
1
/1'
1
x/I
изве
т
ны
в
нст
1е
Iюорд
инат
Ох
и
Оу
то во
стро
Dие
осущ
CTDJI R
Т
Я
В
с..
'
,
ду!
Щ
м
ПОРЯДIi:
радиу-
1
ом,
равным
2 I
Ф1/'
ПРО80-
дим
ОКРУ>ЮIОСтr.
Ц
НТРОМ
В
Z,
гд
OZ =
~
l'
Тогда
расстояния
ОА
u
ОВ
будут
Ри
с.
20.
гла
вными
момеВl'ами
инерции.
ТО'fI\И
Х
И
у
троятся
по
извест
ным
величинам
1
х
и
1
11
И
будут
раСПОJlагаться
на
ОКРУ"
ности
.
Поворачивая
Zx
на
угол
2а
по
часовой
тр
дке,
находим
точки
Х'
и
У'
lf
по
Н\{
1
опр
де
IЯ
м
величины
1
'1'
1.
1
n,.
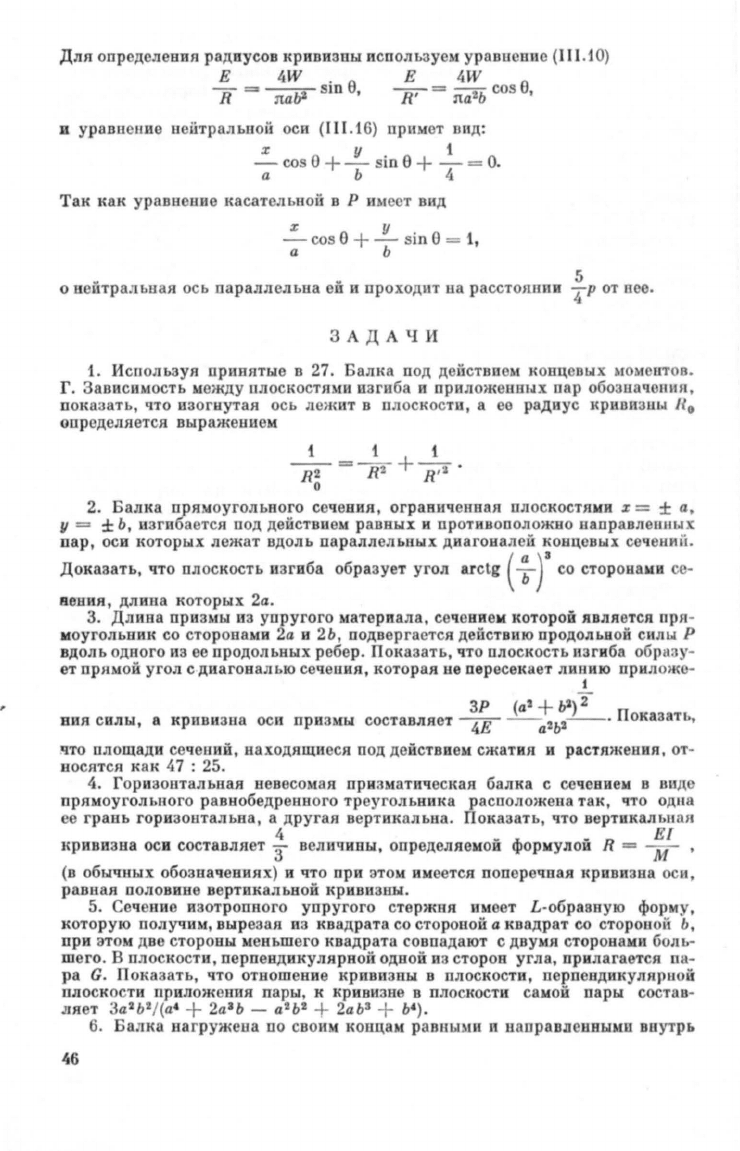
29.
ПРИ
I
ЕНЕНИЕ
ТЕОРИИ
ПРlJмер.
.
'(СПlf
ПРПМОЛIJП
iiooii
балки
им
т
форму
эллипса
с
по
УОСЯМlI
4 R
Ь.
1\
TO'II<aM
Р
(а
соз
8,
Ь
s
in
8)
концевых
ссчеlllJii
балки
ПРlJложены
рав
Ш"6
и
I1РОТИВОПОЛО1КВО
uаuраВ
ЛС
l1l!Ы
С
СIlЛЫ
W,
деuствующие
параллолыlO
балк
.
Показать,
'J'Гo
угол
можду
плосностью
пары
и
пло
костью
lt3гиба
равен
ТОЧКа
пршш
у
arctg
{a22-ЬЬ~
sin
28}.
HaiiTlI
ураввеП8е
пен-
жения
силы
.
а
,
P(o
c
os8,
ЬJ/Л8)
трал
ЬНОIr
OCII
Jt
покааать,
что
она
Я8ляется
па-
-E-~_~-+d"",
'-t_
..
х
раЛЛeJlЫlоii}(
KaC3TC
JIbIJoii
эллипса
в
точ){
Р
И
5 _
прохоДнт
на
раССТОЯlII
1JI
т. р
от
насател
ЬВОIJ,
где
J'tlc. 21.
Р
сть
ДЛ
IJШ\
перпеПДlшулнра
па
начала
!,ООРДII
lIат
113
I,асательпую
(рис.
21).
Д('l
1'1111('
С
IIЮ"
W n
ТО'1I{
Р
Р<lВВО
СОВЫ
СТНО
МУ
Д
iiствшо
СИЛЫ
W
и
Il
a
pbl
11
03'1<1
:10
,щор
д
lIит.
}
ОМООIl
~ITbl
пары
равны
L =
"УЬ
sin
6,
М
= -
Wa
cos
8,
W 1 1
а
раСТlIг
нпающаl1
Сllла
Т
=
--
о
Tal{
К,I(
[х
=
-,
Jt
аЬ
3
IJ
[11
=
-4
лаЗЬ,
то
паЬ
'1
а
2
И3
(liI.
14
)
tg
~1
=
b~
Ig
а
1
•
Так
юш
ОР
лежит
в
плоскости
пары,
то
tg
а
1
Ь
а
..",
а
tg
в,
и,
медовател
bUO
, tg
~1
=
Ь
tg
в.
ОТl\уда
а
2
-
QJ
2аЬ
sin
26.
Для
определевия
радиусов
кривизпы
пспользуем
уравнение
(111.10)
Е
4.w.
Е
4.W
R =
nalJ2
ЗlD
6,
R'
=
nа
2
Ь
соз
6,
п
уравн
е
ние
нейтральной
оси
(II
(.16)
прим
е
т
вид:
х
У
.
1
-со
О
+-З
IOО
+
-=
0.
а
Ь
4.
Так
как
уравнение
касательноii
в
Р
,
им
ее
т
вид
х
у
-
со
з
6
+ - s
in6
=
1,
а
Ь
5
о
пейтральuая
ось
параллельва
ей
и
прохо
д
ит
на
расстолпии
7;Р
от
l1eo.
ЗАДАЧИ
1.
Используя
припятые
в
27.
Балка
под
д
е
истви
м
копц
вых
ъroMoln
o
B
.
г.
Зависимость
между
плоскоствми
изгиба
и
приложеuпых
пар
об
0:
10
a'lOrlll
11
,
показать, что
изогиутая
ось
J1
е
жит
в
п
л
оскости,
а
ее
радиус
Rри.ВШIIiЫ
N"
определяется
выражеuием
1 1 1
7 = R2 +
R
'~
·
о
2.
Башtа
прямоугольпого
сечени.я,
о
'
гра1iичепвая
плоскоствмв
х
= ±
а,
у
= ±
ь,
uэгпба
е
тсв
под
действием
равных
н
протнвополож:ио
паправлеUIIWХ
пар,
оси
которых
лежат
вдоль
параллеЛЫIЫХ
диагоналей
концевых
сечениU.
Доказать,
что
плоскость
изгиба
образует
угол
arctg ( :
)8
со
стороваии
се
вепия
,
длина
которых
2а.
3.
Длина
прнзмы
из
упругого
материала,
сечением
которой
является
пря
моу
гольвик
со
сторонамн
2а
и 2Ь,
подвергается
деiiствию
продольной
силы
Р
вдоль
одпого
из
е
продольвых
ребер.
Показать,
что
плоскость
изгнба
обр
а
зу
ет
ПРJlМОЙ
угол
с
·
ди.аговалью
сечеUИJl,
которая
не
пересекает
линию
ПРИJ10ЖО
-
1
ЭР
(а
2
+
Ь
2
)2
пия
силы,
а
КРИВllзпа
оси
призмы
составляет
-ш-
--
а
2
Ь
2
--
'
Показать,
что
площади
сечепий,
ваходящиеся
под действием
сжатия
и
растяжения.
от
носятся
как
47
: 25.
4.
ГОРИЗ0uтальпая
невесомая
приэматичеСltая
балка
с
сечепием
в
ВИД
ПРЯМОУГОЛЬflОГО
равнобедренного
треУГОЛЬНl1Jtа
расположепа
так,
что
одна
ее
грань
горизоптальна,
а
ДРУl'ая
вертикальна.
ПОRаэать,
что
вертикальная
4 v
Ф
• R
ЕЕ
нривизна
оси
составляет
3"
величипьt,
определяемои
ориулои
=
М
'
(В
обычных
обозначениях)
и
что
при
этом
имеется
поперечная
кривизна
оси,
раввая
половине
вертикальвой
крививJIы.
5.
Сеч
ние
изотропного
упругого
стержня
им
ет
L-обравную
форму,
которую
получим,
вырезая
из
квадрата
со
стороной
а
квадрат
со
стороной
Ь.
при
этом
две
CTOPORbl
меньшего
квадрата
совпадают
с
дву.tя
cTopOHaMI)
боль
шего.
В
плоскости,
перпендИ1<УЛЯРНОЙ
одпой
из
сторон
угла,
прилагается
па
ра
G.
Показать,
что
отношение
КРИВIIЭПЫ
в
плоскости,
перпеНДIIКУЛI1РПОЙ
плоскости
при:ложеlJJJЯ
пары,
к
кривизне
в
плосности
самой
пары
состав
ляет
За
2
Ь
2
/
(а
4
+
2а
3
Ь
-
а
2
Ь
2
+
2аЬ
3
+
Ь.).
6.
Балка
нагружена
по
своим
копцам
равными
п
направленными
внутрь
46
спламп
Р,
uриложепны
Iи
в
точках
с
коорднuата&fИ
(а.,
~),
отвесеннышt
I(
ГllaBHЬUoI
осям
Ifuерции
сечения
с
началом
в
центре
тяжести.
Показать,
'ITO
ха.
yj3
уравнением
нейтральпоii
OCII
будет
--
+
--
+ 1 =
О,
где
k
x
и
k
ll
-
ра-
k~ k~
днусы
инерции
сечения
относительпо
осей
х
и
у.
Доказать,
что
при
сечошш,
уназаuвом
в
задаче
2,
вся
балка
будет
подвержена
сщатию,
есля
точка
(а.,
~)
2 2
лежит
внутри
ромба,
диагонали
которого
равны
та
и
тЬ'
Найти
соответ-
СТВУЮЩlfе
площадr!
для
сечения,
IIмеющего
форму
окружности
и
форму
рав
постороппего
треу
гол
ЫНJI(а.
7.
ЦUЛUIJДР
ностоянного
сечения
S
с
образующими,
параллелытымп
оси
z,
слегка
изгибается
под
деiiствием
концевых
пар
±Gi.
ПОIС8зать,
что
00-
(?l
тевциальвая
эиергия
по
длине
цилиндра
составляет
2EI'
где
1
есть
момент
инерции
сечения
отвосuтельво
оси
х.
r
л
а
8
а
IY.
RРУЧЕ
I
[И
Е
СТЕl
fI
пя
30.
КОМП
О
Н
Е
НТЫ
П
ПРЯЖ
Е
ППЯ
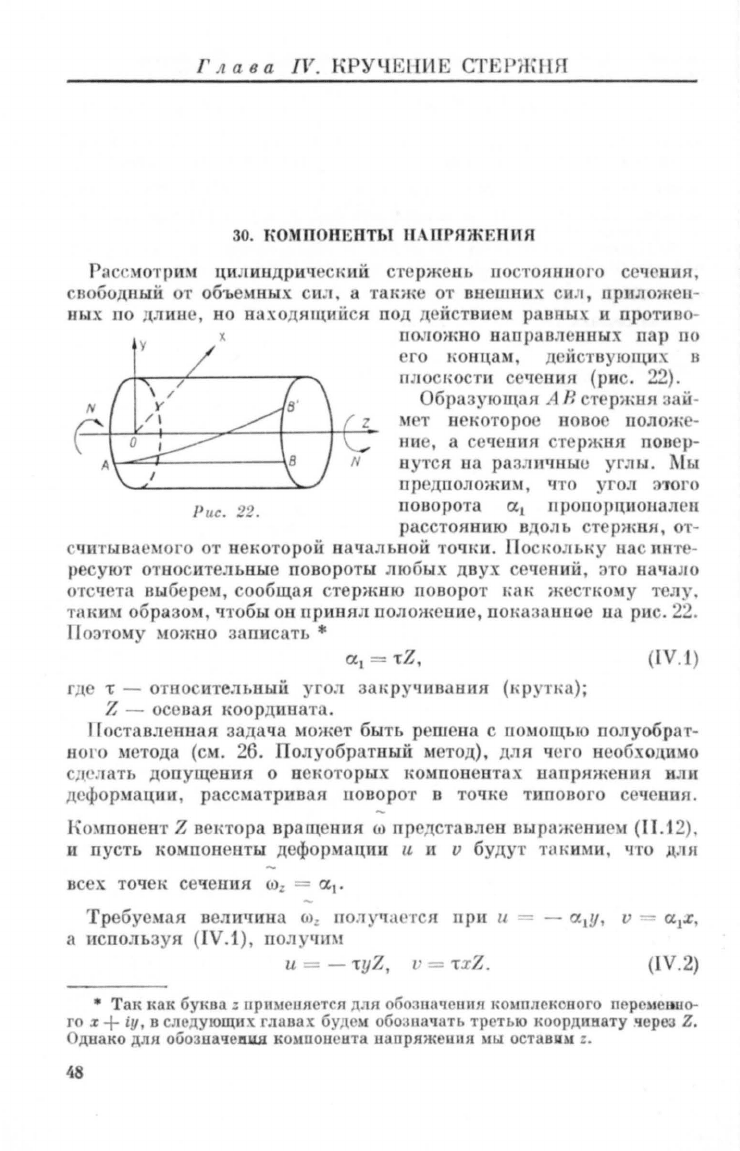
Р3
мотрим
цилиндрич
СКl1Й
стержень
по
ТОЯR
IJ
ОГО
се'](~НИЯ
свободный
т
объемных
сил.
а
таюк
01'
внешних
си
1,
пряло»
еи
вых
по
длине,
но
ваходящиiiся
у
)(
в
мет
н
КОТОРО
пр
ДПОJIОЖИМ,
что
поворота
0:\
ПРОПОРЦИОllалсн
ра
СТОЯПИI
в
OJI
Ь
ст
р»
ВЯ,
01'
-
·Шl'ывD.С
101'0
от
некоторой
начальной
ТОЧЮI.
1l0СI,ОЛЬКУ
на
ипте
р
суют
относите
ьные
пово
р
оты
любых
дв
х
с
ч
П
И
Й,
это
uаЧi.lJIО
от
'!
та
выберем,
сообщая
'TepiКHТO
поворот
t;aK
ж
СТКОМУ
телу.
таким
образом
чтобы
он
принял
поло}!
спие,
покаэапuое
иа
рис.
22.
1
[о:этому
можно
записать
*
где
't
-
отпо
ИТ8ЛI,ньШ
угол
заl,РУ'lивавия
(круп,а);
Z -
осевая
координата.
(IV.
l)
I
[оставленная
зада(lа
l\южет
быть
р
ш
па
с
по м
ощью
полуобрат-
1101
'0
1Стода
(см.
26.
ол
обратный
метод),
для
чего
необходимо
д
'даТl,
допущения
о
некоторых
компонентах
напряж
вин
}(ЛН
деф
ормации,
рассматривая
новорот
в
точке
типового
с
ч
пия
.
.кo~тOBeHT
z
BeJ{Topa
вращ
ния
w
пр
дставл
н
выра;.к
ннсм
(II.12),
и пусть
компоненты
деформации
lt
и
V
будут
таl,ИМИ,
что
Д.11Н
ВС
Х
точек
се'lепия
w.
=
0:\.
Требуемая
вели'пrна
0>
:
ПО
ЛУ
'[<lС
[
'
ся
при
lL
= -
O:IY'
v =
О:1Х'
а
uспользуя
(IV.1),
nолу'пш
lt
= -
~Z,
v =
't"
x
Z.
(IV.2)
..
Тан
l,aK
БУl\ва.::
DP[IМ
uлет
л
длп
оБОЗU8'/еUIIЛ
J\О~IПJJекоuого
пере
leU
IIO-
го
х
+
iy,
в
следующих
главах будем
обозначать
тр
тью
КООРДfПfату
.
череэ
Z.
диако
длf!
обозпа'lеll.Wl
КОА1ПОU
ита
uапрлж
ШIЛ
мы
остаВJ;Ш
Z.
48
Д:IЛ
опред
л
иин
осевого
лер
мещеиия
w
введом
Ф
у
и
к
Ц
и
10
Д
е
п
л
а
11
а
Ц
и
и
ер
(х,
у),
так
/,ак
у
нас
нет
основании
предпо
.'
шгать,
как
в
гд.
IП,
что
сеtI
е
ни
S
остается
П1IOСIШМ
после
дефор
faЦИИ.
По;этому
представим
w
в
форме
w =
.ер
(х, у)'
(IV.
3)
ПО.Т!агая,
что
для
малых
углов
закручивания
функция
депланацЮI
OCTal:JT
я
постоянной
для
всех
сечений.
Используя
(IV.2)
и
(IV.3),
мол
ем
наiiти
компоненты
деформации
и
напряжения,
довлеТВОРЯlOщие
соответствующие
дифференци
аJlьпые
равнения
и
«раевые
условия
'l'
aK,
как
это
сделано
в
26.
Полуобратньrй
метод.
В
данном
случае
компонент
ы
дефор
м
а
ЦШf
(11.1),
(П.2),
(ПА)
будут
Вхх
=
8уу
= €xx =
Вху
=
О;
)
e
xz=+
.
(-
y+ ;:);
eYl
=+.
(x
+ ::). (IV.4)
Л
е
ГJ
<О
пров
рит!>
что
ЭТИ
hO
ЩОfI
е
нты
удовд
ТВОРЯlOт
уравнения
совм
СТRОСТИ
(П.23)
И
(11.24).
На
оснонании
зависимостей
(11.29)
и
(11
.30)
ПОJIУЧИМ
компоненты
напряжений
~
=
уу
=
;;
=
;у
=
О,
?z
=
fL't
( -
у
+
::),
yz
=
1L't
(х
+
::).
)
(1 .5)
Два
уравнения
равновесия
УДОВJIетворяIOТСЯ
тождественн
о
,
а
из
тр
тьего
2 _
д
2
<р
.
д2<р_
!:J.
ер
-
дх
2
+
д
у
2
-
О
.
(1
Y.6)
ОТСlOда
видно
,
что
ер
есть
плоская
1
армоничеСl{ая
функция
*.
Это
дает
нам возможность
представить
компоненты
напряжения
:1:1
д
ругой
форме.
Вводя
сопрлженнуто
гармоническую
фующ
и1О
'IjJ
(см.
(2.7)
из
приложения
2),
получим:
?z = fL't(
~
-
у
)
;
Yz
=
-fL't(
~
-х).
(IV.7)
то
сделано
пр
жде
всего
для
упрощения
краевого
условия.
Из
,·сх
же
соображений
Тогда
I(омпов:енты
напряжения
примут
вид
дХ
ах
ху
=
fL't
ду
;
YZ
= -
fL
't
~.
*
Ола
лазьшается
функцией
кручения
Сев
-
Вепана.-
П
рuJtl.
.
р
ед
.
4
Е.
р.
ГОДФРII
(lV
.8)
(l
У.9)
49