Годфри Д. Теория упругости и пластичности
Подождите немного. Документ загружается.

линиям
при
фото
упругом
методе
исследов
апия
напряжениii,
Н,
следоватеJIЬUО,
такие
точки
могут
быть
задавы
уравнением
IФ
I = const. (1.54)
11
.
КРУГИ
МОРА
о.
Мор
предложил
графический
метод
щrя
на
.·
ождения
нормаль
ной
и
I\асательной
составляющих
вектора
напряжения
R
p
в
точке
при
условии,
что
главные
наПРЯrкения
и
направления
изв
стны.
о с
ти
направления
DрИlШма
ются
за
оси
координат,
и
предполагается,
что
BeliТOp
р
ОТНОСllтельно
упомянутых
ос
й
зада
тся
ураввеlШем
(1.6)
И,
СJlедовательно,
из
(1.9)
R
p
=
lPi
+
mQj
+ nRk,
(1.55)
где
предполагается,
что
Р>
> Q >
л
(на
рис.
10
эти
вели'LИНЫ
показаны
положи
теЛЬНbJ~m,
что
не
является
обяз
тельным).
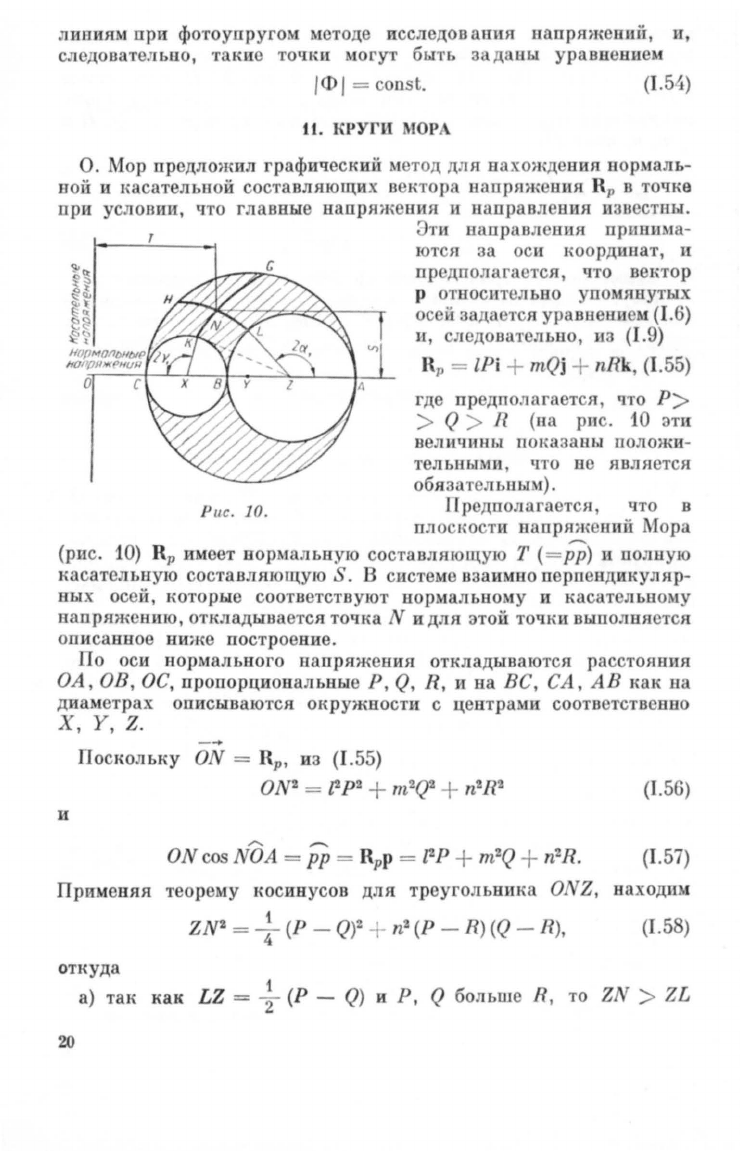
РllС.
10.
Предполагается,
что
в
ПЛОСI(ОСТИ
напряжений
Мора
(рис.
10)
R
p
имеет
нормальную
составляющую
Т
(
=
рр)
и
полную
касателУ>нуто
составляющую
s.
в
системе
взаимно
перпендикуляр
ных
осей,
которые
соответствутот
нормальному
и
касательному
напряжению,
откладывается
точка
N
и
для
этой
точки
выполняется
описанное
ниже
построение.
По
оси
нормального
напряжения
откладываются
расстояния
ОА,
ОВ,
ОС,
пропорциональные
Р,
Q,
R,
и
на
ВС, СА,
АВ
}(ак
на
диаметрах
описываются
ОI<РУЖНОСТИ
с
центрами
соответственно
Х,
У,
Z.
-
....
Поскольку
ON
= R
p
,
из
(1.55)
ON2 =
Т:-Р2
+ m
2
Q2
+ n
2
R2
(1.56)
и
(1.57)
Применяя
теорему
косинусов
для
треугольника
О
Z,
находим
О
Тl{уда
а)
тю{
20
ZN2 = +
(Р
-
Q)2
+ n
2
(Р
- R)
(Q
- R), (1.58)
t
как
LZ =
"2
(Р
-
Q)
и
Р,
Q
больше
В,
то
ZN > ZL
n
точка
Z
лежит
впе
окружности,
пост
р
оенпой
на
АВ
как
па
диа
м
тре;
б)
если
рассмотрим
направления,
проходящие
через
началь
ную
точку.
для
которой
n
ЯВ.lнется
ПОСТОННJIОЙ
величиной,
соот
ветствующие
ТОЧЮI
N
будут
lежать
на
о"р
жпости
f(
G
с
центром
в
ТОЧRе
Z;
в)
ОКРУЖFlОСТl,
С
диам
тром
АВ
яв
л
яется
геометрическим
местом
точ
к
,ДJШ
которых
n =
О
,
т.
е.
Д
я
направлений,
л
iI
ащих
в
плоскости
хОу.
Аналоги'шо
случаю,
выте
кающемулз
равнения
(1.5 ),
устанавливаем,
что
ТОЧI<а
N
уу
лежит
вне
OI,ружвости
с
диа-
п-"
метро
1
ВС
и
ввутри
окруж-
ности
С
ди
амет
ром
АС,
т. е.
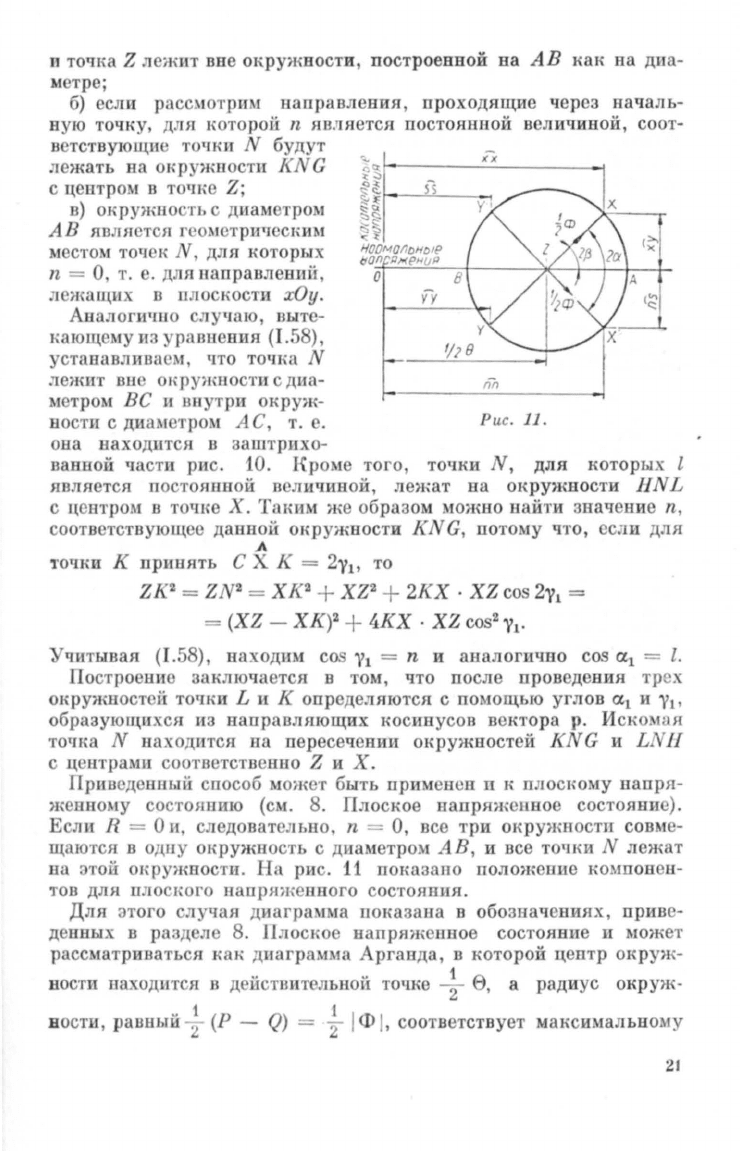
Ри
с.
11.
ова
находится
в
заmтрихо-
А
ванной
части
рис.
10. 1
роме
того,
точки
N,
дЛЯ
которых
1
является
постояпной:
в
личиной,
леа'ат
на
окружн
о
сти
HN
L
с
ц
ент
ром
в ТОЧI(е
Х.
Т.шим
же
образом
можно
найти
значение
n,
соответствующее
данной
окружности
f(
G,
потому
что,
если
для
А
точки
К
припять
С
Х
к =
21'1'
то
ZK2
= Z 2 =
ХК2
+
XZ2
+
2КХ
.
XZ
со
21'1
=
=
(XZ -
ХК)2
+
4КХ
. XZ cos
2
1'
1'
Учитывая
(1.58),
находим
cos
1'1
= n
и
ана
оги'шо
cos
аз.
= l.
Построение
заключается
Б
том,
что
после
ПРОБедения
тр
е
х
окружностей
ТОЧI{И
L
и
К
опредеJIЯЮТСЛ
с
помощью
углов
аз.
и
1'1'
образующ[r.
сл из
направлшощих
косинусов
вектора
р.
Исно
1ая
ТОЧl{а
N
llаХОДIIТСЯ
на
пересечении
Оl<ружностей
KNG
и
L
II
с
ц
нтрами
соответственuо
Z
иХ.
ПриведеНllЫЙ
способ
мож
ет
быть
применсн
п
к
п
IOсиому
напря
женно
'у
состоянию
(с
1.
8.
Плоское
напряженное
состоя
ни
).
Если
R =
Оп,
следовате
J
IЬНО,
n =
О,
все
три
ОI{РУЖНОСТЛ
совме
щаются
в
одиу
Оl{РУЖНОСТЬ
С
диаметром
АВ,
и
все
точки
N
лежат
на
этой
ОI{РУЖНОС
ТИ.
На
рис.
11
показаnо
положепие
компол
В
тов
дЛЯ
ПJIО
"ого
nапрн:жепного
состояния.
Для
;)т
ого
СЛУ'Iая
диаграм
f3.
ПО1<азана
в
обозначениях,
приве
денных
Б
раз
деле
8.
Плоское
напряженное
состояние
и
может
рассматриваться
как
диа
грамма
Арганда,
в
которой
центр
Оl<РУЖ-
.,
- 1
а
НОСТИ
паходится
n
деиствитеJJЬНОU
точне
2
о,
а
радиус
окруж-
н
ости,
равный
~
(Р
-
Q)
=
~
I
ф
1.
соответствует
максимаJIЬНОМу
21
касательному
нап
р
яжению.
I\омбинации
напряжений
~
Ф
и
~
ф
'
изображаются
в
виде векторов
ZX,
ZX'.
Таким
образом
получи~{
яснуIO
графическуIO
интерпретацию
уравпения.
(1.33).
ТОЧI<И
А,
Х',
У,
В,
У',
Х
лежат
на
прямых,
соответствующих
осям
Ор,
n,
у,
q,
S,
Х
(см.
рис.
6),
но
повернуты
на
двой:вые
углы
в
противополож
ном
направл
е
нии.
ЗАДАЧИ
1.
Показать,
что
при
простоЪ1
растю!\
нии
Т
в
ваправлешш
одllЮlЧ:НОГО
веl(тора
р
BeI{TOp
папряжеlJlНI
Н
n
,
дойствующиii
в
плоскостп,
ПСРllСНДJШУЛЛР
IIОИ
еДИRIIЧПОМУ
вектору
n,
опред
е
ля
т
ся
выраж
е
НI1СМ
Н
N
=
Т
(р.n)р.
Прп
р
=
li
+
mj
+ lIk
найти
папряж
е
шfЛ
;:;
(г,
s =
х
,
у
,
=)
D
Dырnщеппи
нсреа
1,
т,
n,
Т.
2.
ИЗ
ТОЧIЩ
О
радиуС-De}{ТОРОМ
ОА
= r
npовс
до
па
пов
е
рхность,
прпче~
(
1
~
r =
117,-""2.
где
гг
-НОРШ\ЛЫI.Oс
напряжев.ио
по
эл
е
модту
в
О,
DОРПОJ.JД[f}{У-
J
lЯРВОМУ
r.
ПО1<азать,
что
если
р
-
перпопдш{уляр.
опущеПI1ыii
из
О
па
касате
1I.вую
плос}{ость,
ПРОХОДflЩУЮ
через
А.
то
вектор
lI
З
ПРЯЖОIНIЯ
Н
•
является
нормалью
1{
поверхности
в
точке
А
11
составляет
1
/
гр.
ПOlшзать.
что
если
s
яв
л
я
ет
я
направленнем
в
е
ктора
OS,
1I0рuен
Дl
ШУЛЯР
ного
}{
r
и
перос
е
кающего
}{асательиую
J.Jлос!<О
ст
['
в
точ.к
е
,
то
~
= 1/rd,
где
OS
= d.
3.
По}{азать,
что
равенства
е
=
р
n
Ф
= ip
з
ад
а
ют
пр
о
сто
е
растл
ж
ешtе
о
о
д
уrлом
в
45
0,
!{
осп
х.
4.
Разложить
пanpяженnя
е
=
А,
Ф
=
в
+ tC, 'I' =
о
,
z7
=
О,
где
А,
В
и
С
деПСТВlIтеЛbJIые
ПОСТОКЕШЫе,
на
всесторопнее
р
ас
тmксине
T
1
n
прос
тое
растяжеlШС
Т
2
П
пanpавл
'
сшlU
(1..
5.
Польэуясь
уравнешщми
npеобразовакия
для
Itомбинацпii:
uапрлжеnиii,
показать,
что
'IИСТЫЙ
сдвиг
может
быть
получен
с
помощью
равномерпого
растяжения
n
Т8}{ОГО
же
равномерного
сжатия
.
В
двух
взаимnо
перпеllДИКУЛIlР
пых
напр
а
влепиях.
6.
В
ТОЧI<
е
элемептарноu
площадки
действует
uапРЮJ<енпе,
пормадь
НО
торо
г
о
паправдена
по
оси
z.
Найти
главпые
папряжешш,
еСЛll
пормаЛЫlое
uапрян{епие
равно
Т,
а
Itасательн:ъr.с
-
q.
r
л
ава
11.
ДЕФОРМА
ЦИИ
f2.
ПЛ
О СК
АЯ
ДЕ
ФОРМАЦИЯ
Попяти
~еформации
лучше
всего
можно
уяснить,
рассматривая
деф
рмйрование
ПЛОСI{ОГО
элемента
в
своей
плоскости
.
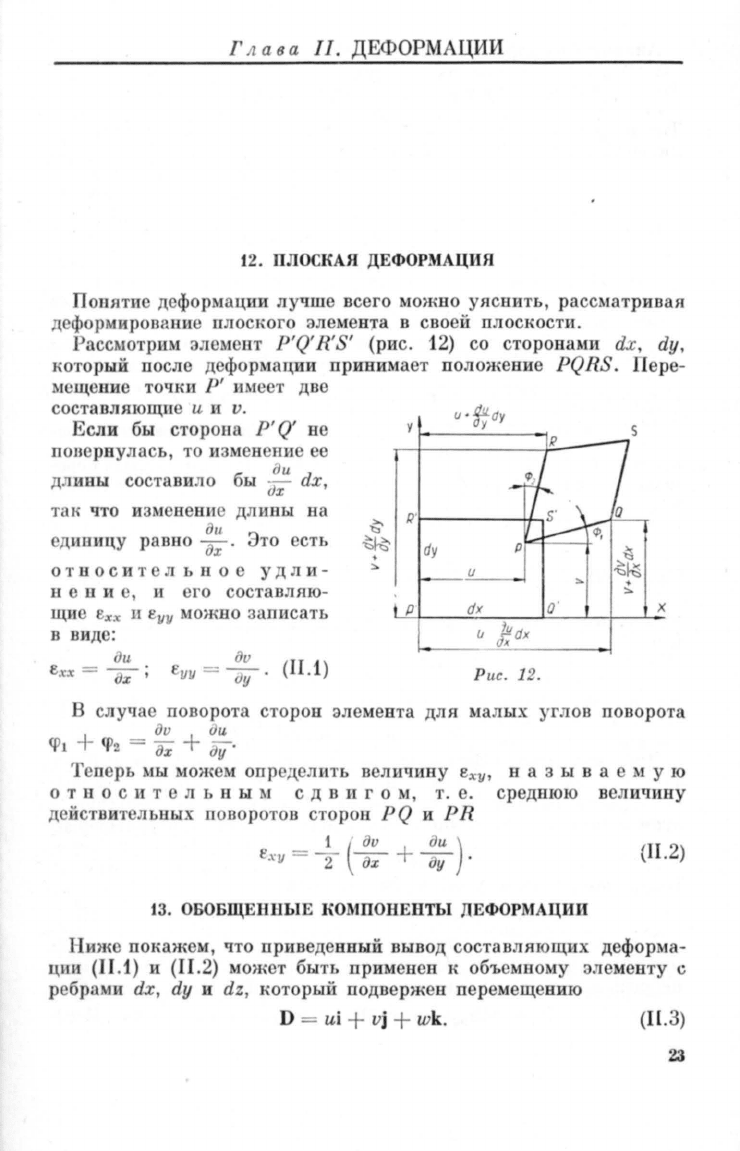
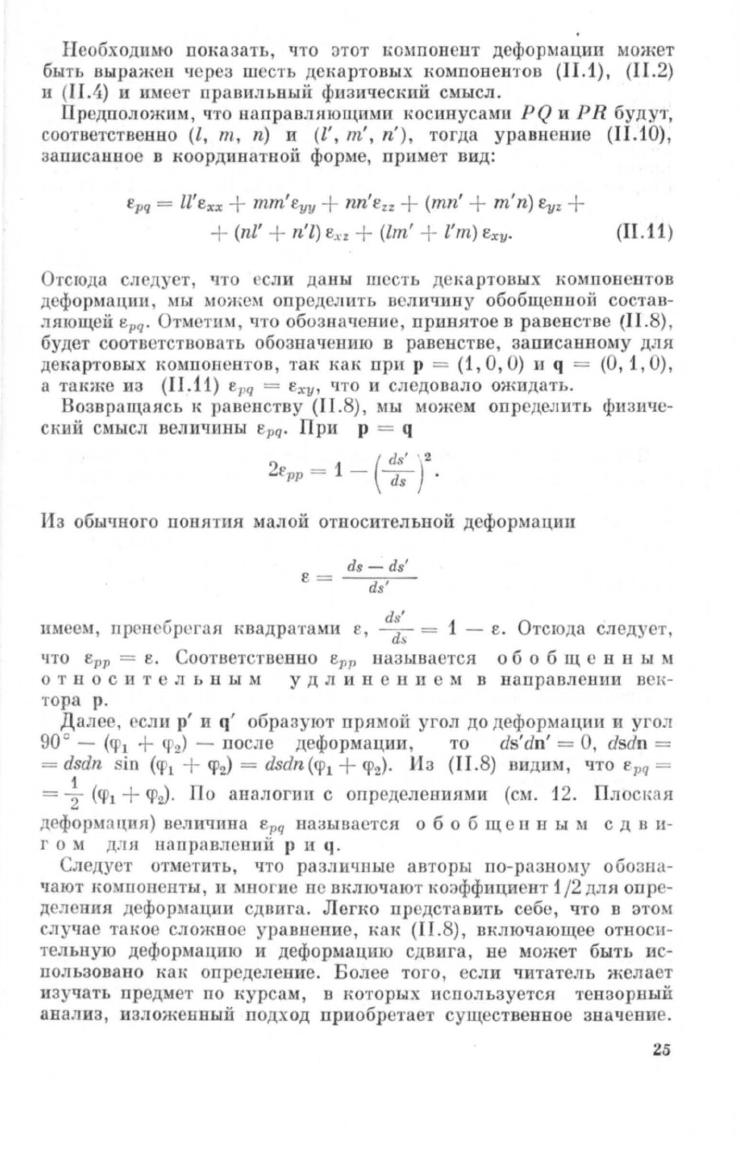
Рассыотрим
элемент
Р'
Q'
R'
S'
(рис.
12)
со
сторонами
dx, dy,
который
после
деформации
принимает
положение
PQR
.
П
ере
мещение
точки
Р'
имеет
две
СОСТQвлюощле
и
11
и.
Если
бы
сторона
Р'
Q'
не
пон
рнулась,
то
изменеElИ
ее
ди
дл
ины
состави
ло
бы
ах
dx,
таи
что ИЗМ6Elени
е
длиnы
на
да
ед
иницу
равно
7JX"'
Это
есть
относит
льнос
удли
Н
е
н
и
е,
и
его
соста:вляlO
щие
8
х
.
IJ
Е
уу
можно
записать
в
виде:
дu
Е
уу
=
-,,-.
(П.1)
vy
~
R'
~
dy
.
р
р
~
и
-61{§
".
•
,..
dx
О
'
х
и
iUl1x
ох
Р
ис
.
12.
в
случае
поворота
сторон
элемента
для
малых
углов
поворота
дu
д
u
0/1
+
0/
2 =
дх
+
ау'
Теперь
мы
можем
опред.елить
величину
8
ху
,
Н
азы
в а
е
м
у
10
О
Т
Н
О
С
и
т
е
л
ь
н
Ы1.I
С
Д
В
И
Г
О М,
т.
.
среднюю
в
е
ичину
деiствит
льных
поворотов
сторон
PQ
и
PR
€xy
= -
--
+
--
.
1 ('
дu
дu
)
. 2
дх
ду
(
П
.2)
13.
О
Б
ОБЩ
ЕНН
Ы
Е
КОМПОН
Е
НТЫ
}lЕ
ФОРМАЦИ
И
Ниш
покажем,
что
приведенный
вывод
состаВЛЯ1ОщtlХ
деформа
ЦIШ
(Н.1)
и
(
11
.2)
может
быть
применен
J{
объемному
элементу
с
ребрами
d.x,
dy
и
dz,
.
которыЙ
подвержен
перемещенmо
D = ui + vj + wk. (
11
.3)
23
Аналогичпо
для
1\0
шонентов
деформации
E
zz
=
~;,
еу.
= + (
::
+
~;)
,
8
х>
=
~
(
:;
+
:~)
.
(
11
.4)
Т
епе
рь
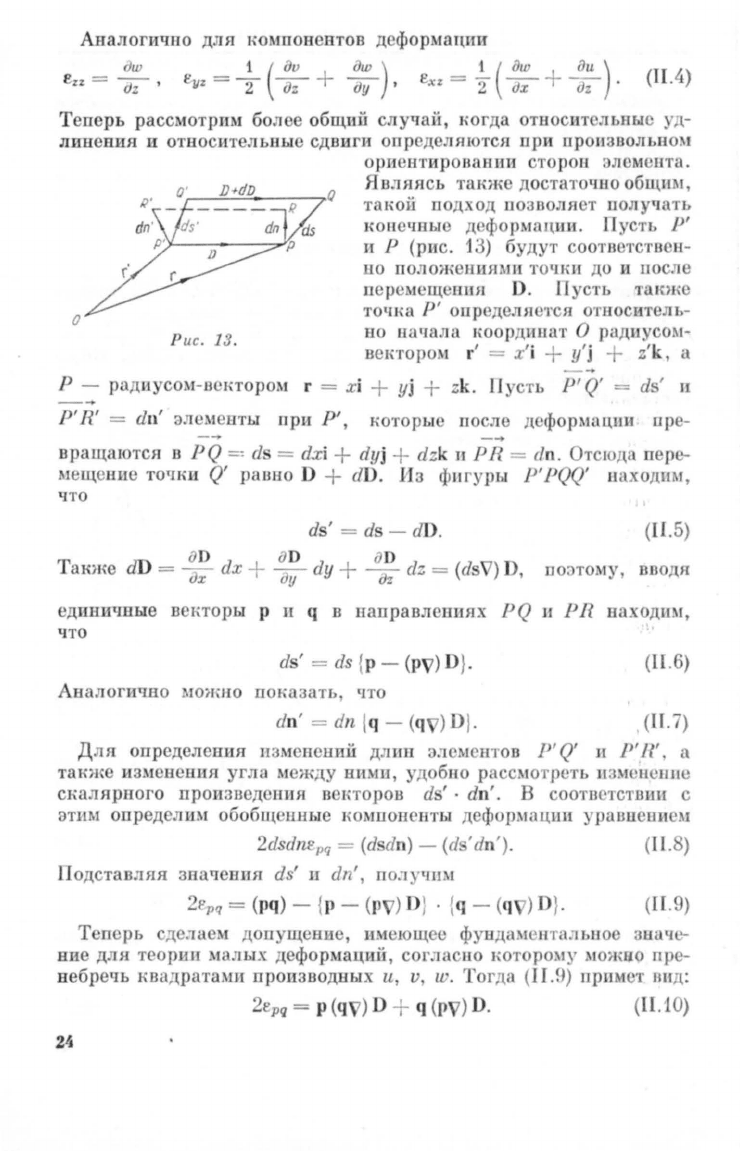
рассмотрим
более
общи
ii
случаи,
I.огда
относительны
е
уд
лин
е
ния
и
относительные
сдвиги
опре
дел
яются
при
ПРОI1ЗООJrьном
Q'
о
ориевтирооавпи
стороп
злемента.
ЯВ.'Iяясь
также
достаточно
общим
,
г---=.:..::..::
-
--::-~Q
таl{ОЙ
подход
DОЗDОJ/яет
получать
Р
ис.
13.
нопе'IНЫ
Д
формаЦUJ1.
Пусть
Р'
и
Р
(рис.
1
3)
будут
соотоетствеи
ио
ПО.110Ж
НИЯhШ
точки
до
и
после
Ilерсмещешrл
D.
Пусть
таЮ1\О
точка
Р'
определяется
относит
ль
но
uа'Iaла
I\ООР
ДИJ1ат
О
радиусом
Bel<
'
ropOM
[.
' =
x'
j +
y'j
+ z'k ,
а
р
-
ра
ДИУСОМ-ВО1\ТОР
ОМ
r = xi + yj + zk. lJycTb
Р'
Q'
= ds'
л
Р'
R'
= du'
элементы
ПРИ
Р',
ноторые
после
Jt
'формации
пре-
-
....
вращаются
в
PQ
=, d = dxi +
dy
j + dzk
)j
РЛ
=
а
н
.
Отсюда
пере-
~Jещение
то ч
rш
Q'
равно
D +
dD.
Из
фJlГуры
P'PQQ'
и
аходи
(,
что
а'
= d
-d
D.
(11.5)
aD aD aD
Таюне
dD =
их
ах
+
ду
ау
+
(h
dz
=
(а
) D,
ПО:JТому,
вводя
единичные
векторы
р
I1 q
В
паправлелиях
PQ
)f
РЛ
наХОДим,
ч
то
d ' =
а$
{
Р
-
(
р
) D
}.
(Н.б)
Аналогично
мощно
показать
что
dn'
=d
nl
q
-(
q )DJ.
(П.7)
Д
л
я
определения
пзменениii
длип
;щоментов
Р'
Q'
)l
р'
Н'.
а
та1\же
изменения
угла
можду
ними,
удобно
рассмотреть
П
3М
uешlO
СI.аллрпого
произведепия
в
/
поров
а'·
dn'.
В
соответствии
с
этим
опред
елим
обобщеШlые
I
{омпонент
ы
деформации
уравнением
2шdn8
р
<;
=
(а
dn) - (d ' dn
').
(11.8)
Подстав
ляя
значения
ds'
л
аn',
пол
ЧJШ
2e
pq
=(
pq)
-{
p
-(
p )D
J.
{q
-(
q )D}.
(П.9)
Теперь
де.l<1ем
допущение,
имеlОще(J
Ф
ндам
е
нталы:lеe
3I:ШЧС
ние
для
т
ориn
ма
IЫХ
деформаций,
согласпо
J,OTOPOMY
МОЖUQ
пре
н
ебречь
квадратами
произоодных
lt,
V
Ш.
Тогда
(Н.9)
примет
вид:
2e
pq
= p (q )D + q
(p
)D. (II.1
0)
24
IIсобходш1'О
Dоказать,
что
:>тот
/
'
омпопепт Д
формацип
может
быть
выраЖСD
через
шесть
денарто
n
ых
)
{омпопентов
(
Н
.
1
).
(II.2)
и
(II.4)
и
им
т
IlраВJIЛЬНЫU
физичесю[й
смысл.
Предположим,
что
направл
я
ющими
I{осинусами
PQ
и
PR
будут,
соответственно
(l,
т,
n)
и
(l',
т',
n'),
тогда
ура
в
н
ние
(
П
.
1
0),
з
аШlсанное
в
коордиватной
форме,
примет
вид:
€pq
=
и'е"х
+
mm'е
уу
+ nn'€zz +
(mn'
+
т'n)
еу.
+
+ (nl' + n'l)
е
."
.
+
(lm'
+
l'm)
Вху.
(
11
.11)
тсroда
сле
,
,\
ет,
что
с
сли
даны
ш
с т
ь
деliартовых
комлов
птов
д
сформации
мы
MO>I'CM
опред
JI
UTb
в
ЛИ'ПIлу
обобщенной
состав
ляющ
'Й:
epq .
ОТМСТIIМ,
что
обозна<ICние,
принятое
в
равенств
(
П
.),
будет
соответствовать
обозпаченшо
в
равенстве,
записанному
для
декартовых
I{O
шопентов,
так
иак
при
р
= (1,
О,
О)
11
q = (0,1,
О),
а
ТaI<же
из
(П.Н)
е /щ
=
Е
"
у,
что
n
следовало
ОiJшдать.
Возвращаясь
1\
рав нству
(П.8),
мы можем
оир
Д
шть
ФИЗI1ЧС
СКlJЙ
смысл
веЛПЧIШЫ
ep
q.
При
р
= q
(
щ'
2
2/'
рр
= 1 -
dS
) •
Из
обычного
иопяТJIЯ
малой
относительной
дефОРl\lацип
е
=
ds - ds'
ds'
ds'
ИМ
см
,
ПрNl
б
р
'
ГilЯ
квадратами
(f;'
= 1 -
е.
Отсю
д
а
следуе
т
,
что
е
рр
=
е.
Соответствснно
8
рр
называется
о
б
о б
щ
с
н п
ы
1
О
Т
и
О с
и
т е
л ь
н
ы
м
у
Д
л
11
Н
е
н
п
м
в
направлении
в
1\-
т
ора
р.
Дал
е,
сс
л
и
р'
и
q'
образуют
прямоi.i
угол
до
деформации
и
уго:!
90
С
- (
<r
l +
<Р
2
)
-
после
деформации
то
d 'dn' =
О,
dsd[l
=
=
dsdn
io
(<rl
+
<1'2)
=
dsdn(<I'l
+
<1'2)'
Из
(
П
.8)
ви
д
им,
'1то
e
pQ
=
1
=
2'
(epl
+
<1'
2)'
По
аналогии
с
определения
1и
(см.
12.
ПЛ
CI\
MI
де
форм
а
цпя)
ве.I]ИЧJша
e
pQ
вазывается
о б о б
щ
о
п
н
ы
м
с
Д
в
11
-
Г О
~1
д:
ш
uаправ
л
пли
(>
и
ч
.
Сл
ду
е
т
отм
тить,
что
раЗЛll'шые
авторы
по-разному
ОU0
3
П
ё1-
'
lают
.ко
lUопелты,
и
многи
е
п
е
включают
КО:Jффициент
1/2
дл
я
опр
е
д
ел
пия
деформации
сдвига..
ЛеГI<О
пр
дставитъ
себе,
что
в
этом
случа
тако
сложпос
уравнепие,
:ка:к
(П
.8),
в:ключающее
относи
тельную
деформацпlO
и
деформацш
сдвига,
не
может
быть
ис
пользовано
как
определение.
Более
того,
если читатель
желает
из
чать
предмет
по
l\ypcaM,
в
I{OTOPblX
использу
тся
т
нэорный
ана.'lИЗ,
изложенный
подход
приобретает
существенное
значение.
25
14.
вр
Щ
ЕНИЕ
ЭЛЕМЕНТА
КАК
Ц
ЕЛОГО
в
процсссе
деформации
тела
плоский
элемент
получает
посту
пат
льнос
перемещение,
дефор
шруется
и
вращается
как
одно
цело.
Так
как
стороны
элемента
поворачиваются
не
на
одина
ковый
утол
(см.
рис.
12),
прим м
ср
дний
поворот
тих
сторон
против
часовой
стреЛI\И
как
меру
I{омпонента
вращения
вокруг
оси,
перпендикулярной
ПЛОСI~ОСТИ
ЭJIемепта.
На
рис.
12
этой
ве-
ЛИЧJJНОЙ
буд
т
+
(fPl
-
<Р2)
или
~
__
1
(~_~)
z - 2
дх
ду'
(
11
.12)
Это
есть
компопент
z
DeI{TOpa
вращения
- 1
(U
=
т
rotD.
(11.13)
15.
П
Е
РЕМЕЩЕНИЕ
ТВЕРДОГО
ТЕ
ЛА
При
определеюm
перемещения
точки
тела
обычно
приходится
пит
грировать
урав
н ения
для
КОhшонентов
деформации.
При
ре
шении
этой
задачи,
связанной
с
решением
ш
сти
дифференциаль
ных
равнении,
необходимо
отбросить член
ы
,
соответствующие
пе
рем
щению
т
ла
как
жесткого.
При
интегрироваmш
эти
члены
играют
роль,
аналогич
ную
частным
решенИfIМ
в
тео
рии
оБЫI,НО
венных
дифференциальн
ы
х
уравнений, ПОСКО
J
IЫ~У
они
возпю<ают
из
систем
ы
уравненю1
Bpq =
О,
(11.14)
где
р,
q
могут
принимать
значения
х,
у,
z.
Необ
ходимо
заменить
фор
IY,
которую
это
решеаие
ПРIlобре
т
ает,
для
того,
ч
тобы
его
можно
было
опр
делить
и
отбросить
при
определении
истинного
упругого
перемещенин.
Р
ассмотрим
случай
Врр
=
О,
где
р
могут
принимать
значепия
х,
у,
z,
т. е.
д
u
ди
дш
=
О
ax--
дi/
=
az
.
Ин
тег
рируя,
получаем
U =
и
о
(у,
z)
; V = V
o
(х,
z);
w =
ш
о
(х, у).
Подставляя
эти
значения
в
три
уравнения
Bpq
=
О,
Р
=1=
q,
имеем:
...!:i +
дшо
=
о·
az
ду
,
Взяв
частную
производ
н
ую
от
перв
о
го
уравнения
по
у,
а
от
третье
го
по
Z,
получим
д2ио
_
д2ио
_
О
дуЗ
-
az
2
-
.
НаиБОJlее
общее
р
тение
этих
двух
уравнений
и
о
= K1yz +
bJy
+ C1Z +
а!.
Аналогично
11
ш
о
=
Кз
х
у
+
азх
+
Ьзу
+
dз·
При
подстановке
этих
велиЧИ1l
в
(
П
.
1 4)
необходимо,
чт о
б
ы
K
1
=
К
2
=
К
з
=
О
п
-
Ь
1
=
а
2
=
{t)з,
С
1
= -
аз
=
{t)2'
Ь
З
= -
С
2
=
{t)l'
Таким
образом
и
=
и
о
=
{t)zz
-
{t)зу
+ d
1
;
v =
и
о
=
{t)зх
-
{t)lZ
+
а
2
;
ш
=
ш
о
= {t)lY -
())2
Х
+
d
з
·
В
векторпой
форме
можно
записать
D = D
o
+
(J)
Х
Г
,
гд
D
o
=
d1i
+ d
2
j +
dз
k
,
(J)
=
{t)li
+
{t)
2j +
{t)зk.
(II.15)
ВИДНО,
что
это
перем
щение
состоит
из
поступательного
пере-
111
щення
тела
как
целого,
равного
D
o
и
поворота
(t).
Иввестно,
что
наиболее
общ
е
перемещение
жеСТI<ОГО
тела
имеет
такую
форму.
ll
рниер.
lI
a'
iTf{
коипонспты
растяжсIl.ПЯ
образца,
для
которого:
Из
первого
уравuсНlIЯ
Тх
1./.
=
uo
+
Е'
vTy
v
=v
о--в,
Подставпм
во
второе
уравнение
vTz
W=U'o--у
'
ди
о
+
~
=
~
+
awo
= awo +
дио
_
О
ду
дх
az
ду
дх
az - .
Эта
спст
ыa
ураво:еВ'иu
снова
привоДпт
к
перемещепиям
как
жестного
тепа,
СJJсд
оватеЛЬ1l0
D =
~
(xi - vyj -
"z
k
).
16.
ГЛАВНЫЕ
ДЕФОРМАЦИИ
И
ИНВАРИА
НТ
Ы
При
Р
= q
из
формулы
(Н.Н)
IlОЛУЧ111
обобщенное
удлинеEПlе.
выращ
енное
через
дека
ртовы
компоненты
деф
ормации
&рр
=
f8
xx
+
тn
2
eyy
+ n
2
8
zz
+
2mnеу.
+ 2nl8
xz
+ 2mlf:x1l' ([1.16)
Если
положение
точки
А
(х,
у,
z),
которая
lещит
на
прямой,
ПРОБ
-
денной
в
направлении
р
,
определяется
уравнением
РА
1 1
[ I
е
рр
I J 2
то
точка
А
л
жит
на
по
в
ерхности
второго
порлдка
(кваДРlше)
,:t.2
exx
+
у28уу
+ Z2
8z
% + 2yzfyz + 2xzf:xz +
2хуех!/
= ±
1.
(1I
.
17)
Знак
минус
в
правой
части
уравнеНllЯ
берется
при
отрицательном
значении
8
рр
•
Поверхность
деформаций
будет
иметь
три
ПЛОСI<ОСТИ
симметрии,
которые
пересекаются
по
ее
осям.
Из
г
о
fетрии
изв
'1'
-
НО,
что
уравнение
этой
поверхности
относительно
осей
им
ет
вид:
Ах
2
+
В
у
2
+
Cz'.!.
= ±
1,
и,
таким
образом,
деформации
сдвига
относительно
осей
будут
равны
нуюо.
Такие
оси
называются
г
л
а
в
n
ы
м
и
о с
я
м
и
Д
е
фор
м
а
Ц
и
и,
и
ниже
мы
ПОl(ажеы,
что
вследствие
пропор
ци
она
льности
между
касательным
напряжени
111
и
деформацией
сдвига
эти
оси
те
же, что
и главные
оси
напряжения
для
изотроп
ных
материалов.
Вследствие
подобия
уравн
пий
(Н.11)
и
(II.18)
главные
оси
п
J\омпопенты
могут
быть
получены
ТaIiИМ
же
способом,
J,aK
и
глав
ные
осп
папряжения
(см.
6.
Г
лавные
напряжения
n
9.
Инварианты
напряжений).
Таким
образом,
ypaBHeНlle
ехх
-
л
8
Х1l
8
х
%
8
х
!/
8
у
!/
-
Л
еу.
=
о
(Н.18)
8
х
•
еу.
8
п
-
Л
дает
три
значепия
л
ноторые
являются
главными
Д
формациями.
В
ели'Шны
11
=
ехх
+
еу1l
+ 8
zz
,
J 2 =
8;11
+
е;.
+
~.
-
8
хх
8
1111
- €y
y8
zz
-
8
zz
e
xx
и
8
хх
8
ХII
8
х.
1з
=
8
ху
еуу е
у>
€x>
еу
.
€
zz
(П
.
19)
(II.20)
(11
.2
1 )
также
будут
ив
вариантны
при
J\lобом
повороте
системы
осей
де
нартовых
J\оордиват.
28
17.
ОБЪЕ
ШАЯ
ДЕФОР
J
ЦИЯ
Величина
11
имеет
особое
значение,
ибо
если
мы
рассмотрим
эле
MeHTapublii:
объем
с
ребрашr
dx',
ау',
dz'
вне
дефо
рмированном
со
столпии,
то
В
дефо
рмированном
состоянии
длины
ЭТJLХ
ребер
будут
(1 +
е"",)
dx',
(1
+
Е
уу
)
dy',
(1
+
8%%)
dz'.
Поэтому,
сли
пренебр
чь
высшими
степенями
ко~шонентов
дефор
lIJа
ции,
то
изменение
объ
ма
составит
(8=
+
8
11у
+
8%%)
dx'dy'dz'.
Отнуда
вытекает
,
что
относите
ьное
изменение
объема
равно
11.
Выраженная
таким
образом
ВС
И'IИва
11
называется
о
б
ъ
е
111
н
ой
д
е
фор
м
а
Ц и
е
ii
11
обычно
обозначается
как
о.
Следовательно,
в
номuонентах
и
ремещения
o
=
djvD
=
~+~
+~
дх
ду
az
'
(П.22)
1 .
ур
БНЕНИЯ
СОВМЕСТНОСТИ
ДЕ
ФОР
МАЦИИ
Тю(
нак
ш
еСТ
J,
I<омпопентов
деформации
связапы
с
тре
нr
вели
ч-ипами
и,
v
и
Ш,
они в
все
являются
независииыми.
Если,
напри
мер,
будем
рассматривать
деформации
д!)
E1IY=~'
1
(дU
д!)
)
Е
Хll
=
Т
ду
+
а;-
,
то
мо
жно
заметить,
что
ЕРе=
д
2
г
Уll
д
З
{дU
дIJ
}
аг+
дx~
=
дхду
ау+
ах
'
пли
Аналогuчно
(
11
.23)
Еще
одна
группа
трех
иснлюченных
неизвестных
связана
урав
нением
(П
.24
)
где
р,
q,
т
заменяются
х,
у
или
z
при
условии,
что
р
=1=
q
=1=
т.
Уравнения
(II.23)
и
(П.24)
образуют
уравнения
совместности
де
формаций,
которые
долж
ны
удовлетворятьс
я
любой
системой
nомnонеитов
деформаЦllИ.
29