Гаспер Б.С., Липатов И.Н. ИВС и АСУТП. Учебное пособие
Подождите немного. Документ загружается.


61
W(jw) = W(S) (4.7)
S= jw
Соотношения (4.5), (4.7) есть модели ОУ(ТП) в частотной области.
Стационарные и нестационарные модели ОУ(ТП) рассмотрим на примере од-
номерного ОУ(ТП). Нестационарная модель ОУ(ТП) в этом случае имеет вид
n d
i
y(t) m d
j
x(t)
∑
a
i
(t) = ∑ bj(t) , n ≥ m . (4.8)
i=o
dt
i j=o
dt
j
Если a
i
(t) = a
i
= const; b
j
(t) = b
j
= const, то из (4.8) получим стационарную модель
ОУ(ТП).
Непрерывная модель ОУ(ТП) в пространстве состояний определяется соотно-
шением
&
X
(t) = F(t)X(t) + C(t)U(t) + G(t)w(t), (4.9)
где X(t) - вектор состояния ОУ(ТП) размерности (n
x 1) в момент времени t; U(t) -
вектор управления ОУ(ТП) размерности (m x 1) в момент времени t; w(t) - вектор
случайных возмущений размерности (l x 1) в момент времени t, действующих на
ОУ(ТП); F(t), C(t), G(t) матрицы с размерностями (n x n), (n x m), (n x l).
Дискретная модель ОУ(ТП) в пространстве состояний имеет вид
X[k +1] = φ (k+1,k)X[k] +Ψ(k+1,k) U[k] + Г(k+1,k)w[k], (4.10)
где X[k] = X(t
k
); t
k
= kΔt; U[k] = U(t
k
); w[k] = w(t
k
); X[k] - вектор состояния ОУ(ТП)
размерности (n x 1) в момент времени t
k
;
U[k] - вектор управления ОУ(ТП) размер-
ности (m x 1) в момент времени t
k
; w[k] - вектор случайных возмущений размерно-
сти (l
x 1) в момент времени t
k,
действующих на ОУ(ТП); Φ(k + 1, k) = Φ(t
k
+ 1
, t
k
) -
матрица состояния системы размерности (n
x n); Ψ(k + 1,k) =Ψ(t
k
+ 1
, t
k
) - матрица
управления размерности (n
x
m); Г(k+1,k) = Г(t
k
+ 1
, t
k
) - матрица возмущения сис-
темы размерности (n
x l); Δt - интервал дискретности измерений; k = 0,1, ...- дис-
кретное время.
Схема статического ОУ(ТП) приведена на рис. 4.4
x
1
(t)
.
. ОУ(ТП) y(t)
u
m
(t)
Рис.4.4
Статическая модель этого ОУ(ТП) имеет вид
y(t) = a
1
u
1
(t) + a
2
u
2
(t) + ... + a
m
u
m
(t), (4.11)
где y(t) - выходная переменная, u
1
(t), u
2
(t),..., u
m
(t) - m входных переменных.
Динамическая модель для ОУ(ТП) с одним входом и одним выходом определя-
ется соотношением (4.3).
62
Модель ОУ(ТП), линейная по переменным, может иметь следующий вид
&
x
1
(t) = a
11
x
1
(t) + a
12
x
2
(t) + b
1
u
1
(t);
(4.12)
&
x
2
(t) = a
21
x
1
(t) + a
22
x
2
(t) + b
2
u
2
(t).
Модель ОУ(ТП), нелинейная по переменным, имеет, например, вид
&
x
1
(t) = a
11
x
1
(t) + a
12
x
1
(t) x
2
(t)+ b
1
u
1
2
(t);
(4.13)
&
x
2
(t) = a
21
x
1
2
(t) + a
22
x
2
(t) + b
2
u
2
3
(t);
Детерминированная модель ОУ(ТП) может определяться соотношением
&
x
1
(t) = ax(t) + bu(t) + ψf(t), (4.14)
где u(t) - детерминированное управляющее воздействие; f(t) - детерминированное
возмущение, действующее на ОУ(ТП). Например, f(t) = a
0
+ a
1
t, где a
0
и
a
1
- постоян-
ные коэффициенты. В уравнении (4.14) a, b,
ψ также являются постоянными ко-
эффициентами.
Если в (4.14) f(t) - случайная функция времени (см.рис.4.5),
f(t)
0 t
Рис4.5
то в этом случае модель ОУ(ТП), описываемая уравнением (4.14), будет стохасти-
ческой. Модель (4.14) также будет стохастической, если a, b,
ψ - случайные вели-
чины,
а f(t) - случайная функция времени. Модель (4.9) будет детерминированной, если
G(t) = 0, и стохастической, если G(t)<>0.
Модель ОУ(ТП) с распределенными параметрами описывается, например,
уравнением вида
∂
∂
∂
∂
Xzt
t
A
Xzt
z
(,) (,)
=
1
+ A
0
X(z,t) + BU(z,t), (4.15)
X(0,t) = B
0
U
0
(t), (4.16)
63
1
y(z,t) = ∫ C(z,r,t)x(r,t)dr, (4.17)
0
где X(z,t), U(z,t), y(z,t) - векторы; A
1
,A
2
,B,B
0
, C(z,r,t) - матрицы;
Z - пространственная координата; t - время.
Модель ОУ(ТП) с сосредоточенными параметрами имеет вид
&
x
(t) = Ax(t) + Bu(t) + Dd(t), (4.18)
y(t) = Cx(t) + V(t), (4.19)
где A, B, D, C - матрицы; x(t), u(t), d(t), y(t), v(t) - векторы.
4.3.Математическая модель динамики многомерного
объекта управления
Для построения современной высокоэффективной системы управления необхо-
димо иметь описание объекта управления в виде математической модели. Для опи-
сания объекта управления используются системы линейных обыкновенных диффе-
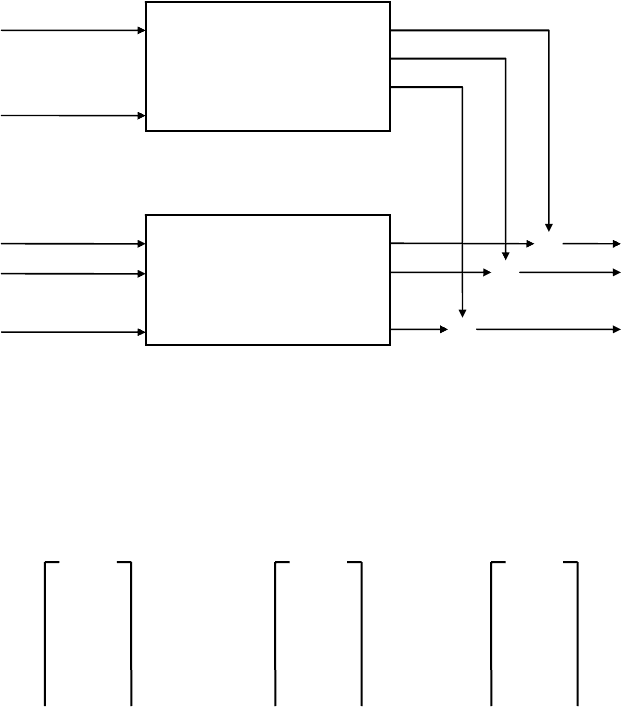
ренциальных уравнений или соответствующие изображения по Лапласу. На рис.4.6
показана система
d
1
(s)
.
. G
d
(s)
d
k
(s)
+ +
u
1
(s) ⊗ y
1
(s)
u
2
(s) + ⊗ + y
2
(s)
. G(s) .
u
m
(s) + ⊗ + y
l
(s)
Рис.4.6
с k возмущениями, m входами и l выходами, связанными зависимостью
y(s) = G(s)U(s) + D
d
(S)d(s) (4.20)
где
d(s), u(s), y(s) - векторы, а G
d
(s), G(s) - матрицы соответствующих размерно-
стей
d
1
(s) u
1
(s) y
1
(s)
. . .
d(s) = . ; u(s) = . ; y(s) = . ; (4.21)
64
. . .
d
k
(s) u
m
(s) y
l
(s)
g
11
d
(s)........g
1m
d
(s)
G
d
(s) = .............................. ; (4.22)
g
k1
d
(s)........g
km
d
(s)
g
11
(s)........g
1m
(s)
G(s) = .............................. ; (4.23)
g
l1
(s)........g
lm
(s)
Эквивалентной вышеприведенной модели линейной системы является модель
во временной области
&
x
= Ax(t) + Bu(t) + Dd(t), x(t
0
) = x
0
, (4.24)
y = cx(t), (4.25)
где
x - n-мерный вектор состояний; d - k-мерный вектор возмущений; u - m-мерный
вектор управлений;
y - l-мерный вектор наблюдений, a матрицы А, В, С и D соот-
ветствующих размерностей в общем случае могут зависеть от времени:
d
1
x
1
u
1
y
1
. . . .
d = . ; x = . ; u = . ; y = . ; (4.26)
. . . .
d
k
x
n
u
m
y
l
a
11
.............a
1n
b
11
..............b
1m
A = ...................... ; B = ........................ ; (4.27)
a
n1
..............a
nn
b
n1
..............b
nm
c
11
.............c
1n
γ
11
..............γ
1k
C = ...................... ; D = ........................ . (4.28)
c
l1
..............c
ln
γ
n1
..............γ
nk
Выпишем аналитическое решение уравнений (4.24), (4.25). В случае автоном-
ной системы(матрицы
А, В, С, D не зависят от времени) можно воспользоваться
преобразованием Лапласа
s
Ix(s) - x
0
= Ax(s) Bu(s) + Dd(s),
y(s) = Cx(s),

65
где I - единичная матрица размера (n x n).
Разрешая полученные уравнения в преобразованиях Лапласа относительно
x(s), найдем
x(s) = (sI - A)
-1
[x
0
+ Bu(s) + Dd(s)]. (4.29)
Возвращаясь к оригиналам, с помощью теоремы по свертке получим для
x(t)
выражение
t
x(t) =
At t
e
()−
0
0
x
+ ∫ e
A(t-τ)
[Bu(τ) + Dd(τ)]dτ, (4.30)
t
0
где e
At
- экспоненциал матрицы At, определяемой как решение однородного мат-
ричного линейного дифференциального уравнения.
d
d
x
τ
= AX, X(0) = I, (4.31)
где
X - матрица размерности (n x n).
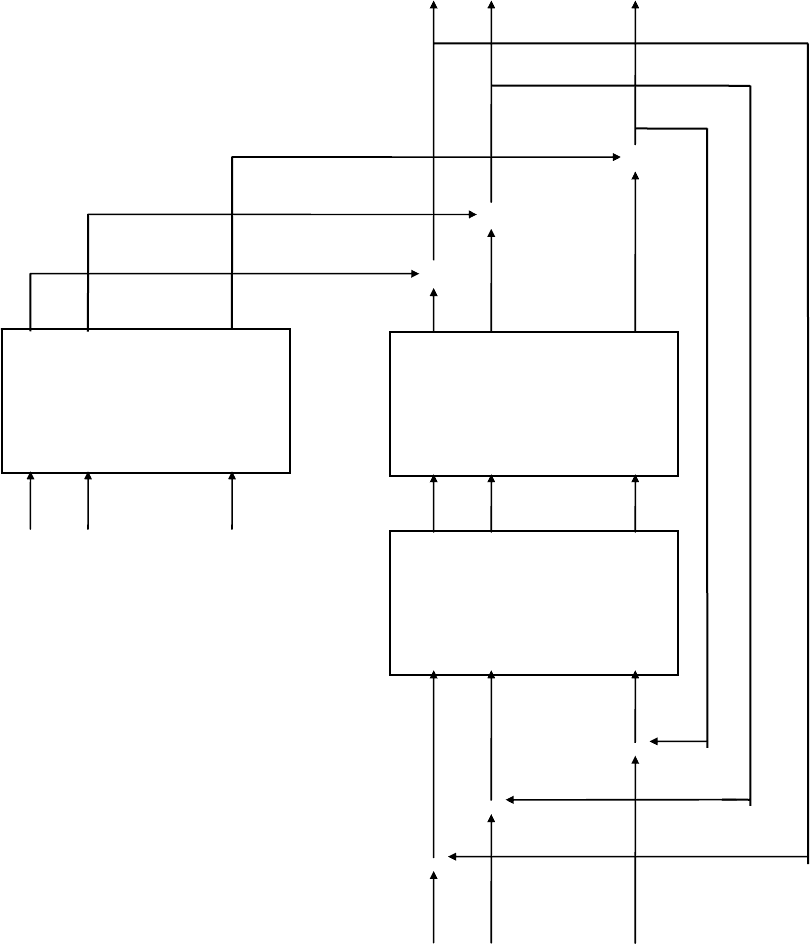
Рассмотрим многомерную систему управления технологическим процессом,
показанную на рис.4.7. В частотной области выход определяется управляющими и
возмущающими воздействиями согласно выражению
y(s) = G(s)u(s) + G
d
(s)d(s), (4.32)
где
G(s),G
d
(s) - матричные передаточные функции системы по управлению и воз-
мущению.
На структурной схеме рис.4.7 показан также многомерный регулятор
G
c.
Мат-
рица
G
c
может быть произвольной, однако на практике чаще всего встречается диа-
гональный случай
g
11
(s) 0
.
G
с
(s) = . ; (4.33)
.
0 g
ll
(s)
при этом элементы g
ii
(s), соответствующие одноконтурным (одномерным ) регуля-
торам, как правило, задают пропорционально интегрально - дифференциальный за-
кон (ПИД - закон) в частотной области
g
ii
(s) = k
i
+ γ
i
1/S + μ
i
S, i = 1,2,...,l (4.34)
или во временной области
t
u
i
(t) = k
i
ε
i
(t) + γ
i
∫ε
i
(τ)dτ +μ
i
⋅dε
i
(t)/dt
, (4.35)
t
0
где k
i
, γ
i
, μ
i
- параметры i -го одномерного ПИД - регулятора.
Здесь ошибка,
или рассогласование, определяется по выражению
ε
i
(t) = y
i
*(t) - y
i
(t), (4.36)
где y
i
*(t) - i-тая компонента l - мерного вектора y*(t); y*(t) - вектор задающих воз-
66
действий.
y
1
y
2
. . . . . . y
l
+
⊗
+ +
⊗
+ +
⊗
+
Возмущающие Управляемый
воздействия Gd процесс G
d
1
d
2
. . . . . . . d
k
u
1
u
2
. . . . . . . u
m
Рис.4.7
Регулятор
Gc
ε
1
ε
2
. . . . . . . ε
l
-
⊗
- +
⊗
- +
⊗
+
y
1
*
y
2
*
. . . . . . . y
l
*
Таким образом, структурные схемы, подобные рис.4.7, представляют собой
замкнутые линейные системы регулирования как во временной, так и в частотной
области.
Операторное уравнение замкнутой системы получается подстановкой в уравне-
ние разомкнутой системы.
y(s) = G(s)G
c
(s)ε(s) + G
d
(s)d(s) (4.37)
выражения для ошибки
ε(s) =
y*(s) - y(s), (4.38)
где
ε(s) =[ε
1
(s) ε
2
(s)....... ε
l
(s)]
T
.
Подстановка (4.38) в (4.37) дает

67
y(s) = [I + G(s)G
c
(s)]
-1
⋅ [G(s)G
c
(s)y
*
(s) + G
d
(s)D(s)] (4.39)
или после упрощения,
y(s) = T(s)y*(s) + T
d
(s)d(s), (4.40)
где
Т(s) и Т
d
(s) - передаточные функции замкнутой системы по управлению и воз-
мущению соответственно;
T(s) = [I + G(s)G
c
(s)]
-1
⋅ G(s)G
c
(s); (4.41)
T
d
(s) = [I + G(s)G
c
(s)]
-1
⋅ G
d
(s). (4.42)
4.4.Наблюдаемость для линейных систем
с сосредоточенными параметрами
Пусть задана система
&
x
= A(t)x + ξ(t), (4.43)
y = C(t)x + η(t), (4.44)
x(0) = x
0
+ ξ
0
, (4.45)
где
x-n - мерный вектор состояния; y-l - мерный вектор выходов системы; ξ(t)-n -
мерный вектор случайных возмущений, действующих на систему; η(t)-l
- мерный вектор помех в канале измерений; ξ
0
- случайная составляющая начально-
го состояния
x(0) (ошибка определения x(0)), а x
0
- детерминированная составляю-
щая начального состояния
x(0). Матрица системы - А - размерности (n x n) и С -
размерности (l
x n) - в общем случае зависят от времени. Величины x(t), y(t )являют-
ся случайными, характеризующимися некоторыми распределениями вероятностей.
Отметим здесь, что уравнение (4.43) является стохастическим дифференциальным
уравнением.
Рассмотрим свойство наблюдаемости для линейных систем. Неформально не-
которая система наблюдаема, если все координаты вектора состояния в некоторый
момент t
0
можно определить по информации о входе системы u(t) и ее выходе y(t)
на конечном интервале времени. Более строгое определение таково: система назы-
вается вполне наблюдаемой, если произвольное состояние
x(t
0
) можно определить
по информации об управлении
u(t) и выходе y(t) на интервале t
0
≤ t ≤ t
1
. Можно
ввести также понятие частичной наблюдаемости, описывающее тот случай, когда
удается восстановить только некоторые координаты вектора состояния.
Отметим, что наблюдаемость определяется детерминированными характери-
стиками системы не учитывает свойства случайных процессов
ξ
(t),η(t)
ξ
0
.
Для некоторых классов систем получены конструктивные условия наблюдае-
мости [6 - 8]. Так, для линейных систем (4.43) - (4.45) с постоянными матрицами
А,С можно показать, что для полной наблюдаемости необходимо и достаточно,
чтобы ранг (n
x nl) - матрицы наблюдаемости L
0
был равен n:
L
0
= [С
Т
А
Т
С
Т
(А
Т
)
2
С
Т
....... (А
Т
)
n-1
C
T
]. (4.46)
В самом деле, рассмотрим уравнение (4.43) при нулевом случайном возмуще-

68
нии
ξ
(t). Решение x(t) записывается в виде
x(t) = e
At
⋅ x
0
= (c
0
I + c
1
tA + ...+ c
n-1
t
n-1
A
n-1
)x
0
. (4.47)
Соответственно этому для наблюдаемого выхода
y(t) получим
y(t) = Cx = (c
0
C + c
1
tCA + ... + c
n-1
t
n-1
CA
n-1
)x
0
. (4.48 )
Для наблюдаемости системы нужно иметь возможность определить
x
0
по дан-
ным о выходе
y(t), 0 ≤ t ≤ t
f
, поскольку, если состояние x
0
известно, известна и вся
исходящая из него траектория
x(t) (4.47). Это в свою очередь приводит к необходи-
мости разрешить уравнение (4.48) относительно
x
0
(псевдоинверсия). Умножая обе
части (4.48) на exp(At)
T
и интегрируя от 0 до t
f
, найдем
t
f
x
0
= [∫ (c
0
C + c
1
tCA + ...+ C
n-1
t
n-1
CA
n-1
)
T
x (c
0
C + c
1
tCA + ...+ C
n-1
t
n-1
CA
n-1
)dt]
-1
x
0
tf
x ∫ (c
0
C + c
1
tCA + ...+ C
n-1
t
n-1
CA
n-1
)
T
y(t)dt. (4.49)
0
Потребуем, чтобы была не вырожденна (т.е. имела ранг n) матрица М:
t
f
M = ∫ (c
0
C
T
+ c
1
tA
T
C
T
+ ...+ C
n-1
t
n-1
(A
T
)
n-1
C
T
) x
0
x
(c
0
C + c
1
tCA + ...+ C
n-1
t
n-1
CA
n-1
)dt. (4.50)
Матрицу
М можно представить также в виде
tf
M= ∫ [С
Т
А
Т
С
Т
....... (А
Т
)
n-1
C
T
] x
0
c
0
I C
c
1
tI CA
x . x [c
0
I c
1
tI ........ C
n-1
t
n-1
I ] . dt
. .
C
n-1
t
n-1
I CA
n-1
(где I - (l x l) - единичная матрица) или в виде
C
tf CA
M= [С
Т
А
Т
С
Т
...... . (А
Т
)
n-1
C
T
] ∫ Tdt . . (4.51)
0
.
CA
n-1
Блочная матрица Т(nl x nl) в (4.51) состоит из (l x l) диагональных блоков с эле-
ментами (c
k
c
j
t
k
t
j
), k, j, = 0,1, ...., n-1.
Используя известные положения алгебры, можно доказать следующие утвер-

69
ждения: для того чтобы выполнялось равенство rank M = n, необходимо и доста-
точно, чтобы rank
L
0
= n.
Обобщая этот результат на случай переменных во времени матриц
А,С Калман
показал, что система (4.43) - (4.45) будет вполне наблюдаемой в момент t
f
> t
0
тогда
и только тогда, когда положительно определена матрица
t
f
M(t
0
,t
f
) = ∫ Φ(t,t
0
)
T
C
T
(t)C(t)Φ(t,t
0
)dt . (4.52)
t
0
Напомним, что Φ(t,t
0
) - фундаментальная матрица системы, т.е. решение матрично-
го линейного однородного уравнения
.
Φ(t
0
,t
f
) = A(t) Φ(t,t
0
), Φ(t
0
,t
0
) = I. (4.53)
Пример 4.1.
Система описывается уравнениями вида
&
() (),
() () (),
xFxGt Cut
zt Hxt t
=+ +
=+
⎫
⎬
⎭
ω
υ
(4.54)
где
x
1
z
1
(t) υ
1
(t)
x = ; z(t) = ; υ(t) = ;
x
2
z
2
(t) υ
2
(t)
0 1 0 0 1 0
F = ; G = ; C = ; H = .
0 0 1 в 0 1
Проверим систему (4.54) на наблюдаемость. Имеем
1 0 0 0
H
T
= ; F
T
H
T
= .
0 1 1 0
Тогда
ранг [
H
T
F
T
H
T
] = ранг
1
0
0
1
0
1
0
0
⎡
⎣
⎢
⎤
⎦
⎥
= 2
и поэтому система полностью наблюдаема.
Если
H =[0 1], то,
H
T
=
0
1
⎡
⎣
⎢
⎤
⎦
⎥
;
F
T
H
T
=
0
0
⎡
⎣
⎢
⎤
⎦
⎥
и
ранг [
H
T
F
T
H
T
] = ранг
⎥
⎦
⎤
⎢
⎣
⎡
01
00
= 1.

70
В этом случае система не наблюдаема.
4.5. Управляемость для линейных систем
с сосредоточенными параметрами
Весьма существенным при анализе систем управления является понятие управ-
ляемости [6, 9]. Неформально система управляема, если найдется такое управление
u(t), которое обеспечивает ее перевод из произвольного начального состояния x
0
в
произвольное же состояние
x
d
за конечное время. Более строго определение управ-
ляемости может быть сформулировано следующим образом.
Система называется полностью управляемой, если из любого начального со-
стояния
x
0
(t
0
) она может быть переведена в любое наперед заданное состояние x
d
(t)
с помощью некоторого управления
u(t) за конечное время t - t
0
≥ 0.
Возможен случай частично управляемой системы, т.е. системы, имеющей под-
множества начальных состояний из которых достижение произвольного желаемого
состояния за конечное время невозможно.
Из этого определения для конкретных классов систем можно получить конст-
руктивные условия управляемости. Так, в случае постоянных матриц
A и B система
(4.24) - (4.25) будет полностью управляема тогда и только тогда, когда ранг (n x nm)
матрицы управляемости
L
c
равен n, где
L
c
= [B AB A
2
B ..... A
n-1
B] . (4.55)
Вывод этого условия может быть проделан с использованием аналитического вы-
ражения для решения системы (4.24) - (4.25) при D = 0:
t
x(t) = e
At
x
0
+ ∫ e
A(t-s)
Bu(s)ds, (4.56)
0
где e
At
может быть записано в виде
e
At
= I + At +
1
2
A
2
t
2
+ .......... (4.57)
Согласно теореме Гамильтона-Кэли, e
At
выражается в виде конечного ряда, или
матричного полинома,
e
At
= c
0
I + c
1
At + c
2
(At)
2
+ .......+ c
n-1
(At)
n-1
. (4.58)
Подставив (4.58) в (4.56), получим
x(t) = e
At
x
0
+
0
t
∫
[c
0
B + c
1
(t - s)AB + ....+ c
n-1
(t - s)
n-1
A
n-1
B]u(s)ds, (4.59)
или
c
0
u(s)
t c
1
(t-s)u(s)
x(t) = e
At
x
0
+ ∫ [B AB ..... A
n-1
B] ⋅ ds. (4.60)